Методика распознавания объекта на основе кластерного анализа нечетких ситуаций

Автор: Рыжаков Виктор Васильевич, Рыжаков Константин Викторович, Рыжаков Михаил Викторович
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Управление и подготовка кадров для отрасли инфокоммуникаций
Статья в выпуске: 1 т.17, 2019 года.
Бесплатный доступ
В статье выделяются обстоятельства, определяющие различные условия, усложняющие получение и формализацию исходной актуальной информации об объекте, подвергаемым наблюдению или локализации в определенный момент времени. С учетом указанных обстоятельств для решения задачи распознавания объекта рекомендуется использовать в качестве основ методик нечеткую информацию. Для развития этого направления в статье предлагается использовать, так называемые, алгебры-шкалы и соответствующие методы шкалирования и кластеризации для получения и преобразования нечеткой информации. С целью обобщения указанной информации в статье используется понятие нечеткой ситуации. При этом выделяется текущая и типовая ситуации. Их совокупности определяют (характеризуют), как наблюдаемый образ объекта, так и его возможный типовой образ, отвечающий конкретным обстоятельствам. При этом для более оперативного распознавания образа объекта рекомендуется использовать кластерный анализ, позволяющий объединить типовые ситуации в кластеры с определенными свойствами, и на основе использовании нечетких отношений включения или равенства определить след движения текущей ситуации по указанным кластерам. Это в значительной стадии позволяет повысить оперативность принятия соответствующих ответных решений на поведение наблюдаемого объекта. Такие решения предлагается заранее разработать и запрограммировать. В статье приводятся аналитические выражения алгоритмов, необходимые для реализации методики распознавания объекта и приводится пример кластеризации типовых ситуаций в виде матричного построения.
Нечеткая ситуация, кластер, отношения включения, равенства, след ситуации
Короткий адрес: https://sciup.org/140256215
IDR: 140256215 | УДК: 006.91:510.644 | DOI: 10.18469/ikt.2019.17.1.14
Object recognition method based on clustering analysis of fuzzy situation
The article highlights the aspects determining various conditions that complicate obtaining and formalizing the initial actual information about the object being monitored or localized at a certain point in time. Taking into account the above aspects, it is recommended to use fuzzy information as the basis for the methods of object recognition. To develop this direction, it is proposed to use so-called algebra-scales and appropriate methods of scaling and clustering to obtain and convert fuzzy information. In order to generalize this information, the article uses the concept of fuzzy situation. The current and typical situations are isolated. Their aggregates define (characterize) both the observed image of the object, and its possible typical image, which corresponds to specific circumstances. In order to recognize the image of an object more quickly, it is recommended to use cluster analysis, which allows to combine typical situations into clusters with certain properties, and to trace the movement of the current situation inside the specified clusters using the fuzzy inclusion or equality relations. This, to a significant degree, makes it possible to increase the efficiency of deciding on an appropriate response to the behavior of the observed object. It is proposed to develop and program such solutions in advance. The article contains analytical expressions of algorithms necessary for implementing the method of object recognition and provides an example of clustering of typical situations using matrices.
Текст научной статьи Методика распознавания объекта на основе кластерного анализа нечетких ситуаций
Процесс распознавания какого-то образа (объекта) предполагает определенную степень сложности представления соответствующей информации. Последнее определяется в значительной степени отсутствием полной совокупности све- дений. Эта информация в лучшем случае может носить стохастический характер. В других случаях будет носить более неопределенный нечеткий характер, который можно представить в количественном виде элементами нечетких множеств [1, 2] нечеткой алгебры [3]. Элементы такой алгебры предполагают, в свою очередь, использование специальных методов шкалирования и измерения [4]. При этом должны учитываться принципы нечеткой логики [5-7].
Постановка задачи
Измерение нечеткой информации согласно [4] основано на использовании условных шкал нечетких эталонных объектов – термов на базовом множестве, путем назначения (выбора) типовых представителей. В последующем фаззифициру-ются все значения базового множества, характеризующие параметры объекта, путем использования функций принадлежности. На основе условных шкал представляется неполная нечеткая информация путем определения её нечеткого включения в типовые термы.
Решение задачи
При этом терм с наибольшим включением текущей ситуации можно считать предварительным результатом измерения нечеткой информации. В этот результат вводятся поправки с использованием дефаззификации при использовании функций принадлежности всех термов конкретной шкалы.
В связи с тем, что объект является достаточно сложным, для его описания целесообразно использовать такие понятия, как нечеткая ситуация [2-8]. Ее параметры – результат рассмотренных измерений. Поэтому с учетом этих данных, полученных на предметных шкалах, нечеткую ситуацию ^^^ ) на момент времени t можем представить следующей совокупностью данных:
St ={ A;,^0)/^ (1)
где ?е{1,2,...,/} – номера признаков (параметров) объектов; 7,e{0,l,..V,} – номера термов на условной шкале, соответствующей i -му параметру объек та; // (лХ1) – функция принадлежности значения xt нечеткому множеству – терму Ji •
Обобщенное идентифицированное выражение функции принадлежности согласно [3] представляется в виде:
где хб – базовое множество на предметной шкале; g – параметр, характеризующий нарушение комплементарности нечетких множеств (термов) условной шкалы.
Для того чтобы распознать образ объекта, необходимо сравнить текущую нечеткую ситуацию, характеризующую объект, с типовой нечеткой ситуацией. Сравнение возможно в виде нечеткого включения:
или равенства
где выражает оператор импликации следует учитывать его особенности [4, 9].
В выражениях (2) и (3) символ t можно принять за обозначение текущей ситуации, а g – типовой.
Типовую ситуацию по аналогии с (1) можем представить так:
^Tf I ^7, (XV)/xy?} ’ (5)
Каждый элемент ситуации (1) и (4) характеризуется значением параметра и соответствующей функцией принадлежности.
Если ввести виртуальный эталон объекта, то можно перейти с предметных шкал на универсальные шкалы, на которых базовые множества «6 =1- Переход на универсальные шкалы осуществляется с использованием функций отображения [3, 4]. При этом выражение (2) перепишется в виде:
^Д«р)) = ехрН |a,w-«('^j] -InZ^J , (6)
Заключение
Приведенные выражения ситуаций (типовых) позволяют все возможные состояния изучаемого (наблюдаемого) объекта представить матрицей кластеров (л^^*'*)) [4, 10], что не снижает общности последующих исследований. Её вид в единицах универсальных шкал (^a*) примет вид рис. 1. В матрице («/'') на рис. 1 выражены элементы через параметры типовых ситуаций в единицах универсальных шкал. Выделено 7 кластеров по принципу суммирования индексов (номеров) термов (Ji) • Суммы равны, соответственно, 0, 1, 2, 3, 4, 5, 6. Подобный подход условно предполагает, что с ростом суммы номеров кластеров возрастает степень опасного состояния, т.е. так выражаются Spur движения текущей ситуации во времени St с параметрами (^zO ' Spur, так определенный след ситуации, позволяет наметить ответные меры со стороны оператора охраны. Более конкретные выводы потребуют достаточно объемного экспе- римента, например, численного. Методологию данного эксперимента можно найти в [3]. При этом следует учитывать особенности ситуации [11, 12].
Л/(л')=

ДаИа^а®^^, H^'M^J (а^а^ар^-,]
>(арРхр>ар^||=3 (а^а!2^!3^^., (а^арЦ3^^
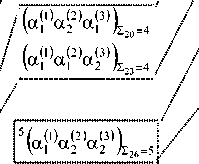
Ф^«Р’аР’)1|2=4
H’aPM3’!,^ Н’аРМЧ,^
■•■•'■ (а^ар’ар1)^^ (а^ар^ар^^з НМ^М3')^
Рисунок 2. Матричное и кластерное представление типовых ситуаций
Список литературы Методика распознавания объекта на основе кластерного анализа нечетких ситуаций
- Аверин А.Н., Батыршин И.З., Блишун А.Ф., Силов В.Б., Тарасов В.Б. Нечеткие множества в моделях управления и искусственного интеллекта. Под ред. Д.А. Поспелова. - М.: Наука, 1986. - 311c.
- Мелихов А.Н., Бернштейн Л.С., Коровин С.Г. Ситуационные советы системы с нечеткой логикой. - М.: Наука, 1990. - 272 с.
- Рыжаков В.В., Рыжаков М.В. Прикладная метрология на основе представлений нечетких множеств. Основы диагностирования в условиях чрезвычайных ситуаций. - М.: МФТИ, 2009. - 143 с.
- Рыжаков В.В., Рыжаков М.В. Аналитические положения прогнозирования состояния объектов с учетом шкалирования и кластеризации нечеткой информации. - М.: МФТИ, 2015. - 86 с.
- Круглов В.В., Дли М.И., Голунов Р.Ю. Нечеткая логика и искусственные нейронные системы - М.: Физматлит, 2001. - 225 с.
