Методика синтеза регуляторов для объектов второго порядка

Автор: Прокопьев А.П., Иванчура В.И., Емельянов Р.Т., Скурихин Л.В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 3 т.17, 2016 года.
Бесплатный доступ
Исследование посвящено изучению варианта методики синтеза ПИД-регулятора системы управления для объектов второго порядка, характерных для мобильных, строительных и дорожных, а также дорожно-строительных машин. В качестве теоретической основы рассматривается модальный метод для линейных систем с учетом расположения действительных полюсов. Представлены результаты аналитического исследования, устанавливающего влияние полюсов на диапазон изменения переходной характеристики. Получены аналитические выражения, определяющие значения составляющих переходной характеристики замкнутой системы автоматического управления с объектом второго порядка. Определены выражения для расчета коэффициентов ПИД-регулятора, включающие коэффициенты передаточной функции объекта второго порядка при заданных значениях действительных полюсов. Выполнена проверка рассмотренной методики на конкретном примере в среде программы Mathcad. С помощью предложенной методики выявлены характерные особенности влияния коэффициентов модели входного воздействия на время переходного процесса. Имитационное моделирование показало, что при некотором значении коэффициента первой производной в числителе передаточной функции, не равном нулю, начальное значение переходной характеристики войдет в 5%-ную зону установившегося значения. Это свидетельствует о возможности значительного уменьшения времени переходного процесса.
Система автоматического управления, синтез, пид-регулятор, модальный метод, действительные полюсы, переходная характеристика
Короткий адрес: https://sciup.org/148177602
IDR: 148177602 | УДК: 681.5
The technique of synthesis of regulators to control objects of the second order
The research examines the technique of synthesis of the PID controller control systems for objects of the second order, characteristic of mobile, construction and road-building and road-building machines. As the theoretical basis the modal method is considered for linear systems with respect to the location of the actual poles. The results of analytical research that establishes the influence of the poles on the range of variation of the transient response are given. The analytical expressions defining the values of the components of the transient characteristics of the closed-loop automatic control system with object of the second order have been taken. Expression for calculating the coefficients of the PID regulator, including coefficients of the transfer functions of second order with given value of the actual poles have been defined. The techniques on a concrete example in the environment of Mathcad have been checked. Using the proposed method characteristic features of the influence of model input factors impact on the transition process have been revealed. Simulation showed that at a certain value of the coefficient of the first derivative in the numerator of the transfer function is not zero; the initial value of the transient response will be included in the 5 % zone steady-state value. This suggests the possibility of a significant reduction of the transient time.
Текст научной статьи Методика синтеза регуляторов для объектов второго порядка
Введение. Синтез регуляторов систем автоматического управления (САУ) – одна из основных предметных задач теории автоматического управления. Наибольшее распространение в САУ технологическими процессами получили пропорционально-интегрально-дифференцирующие (ПИД) регуляторы.
Из многочисленных источников научной и технической литературы можно выделить следующие методы синтеза ПИД-регуляторов [1–10]: эмпирическая настройка; методы Зиглера–Никольса [1] и производные методы [2]; алгебраические методы; методы модального синтеза; методы синтеза в частотной области; методы оптимального синтеза; метод оптимальной ПФ замкнутой системы (технический и симметричный оптимумы). Основные тенденции развития методов синтеза ПИ- и ПИД-регуляторов представлены в книге Aidan O’Dwyer 2006 г. [7] (443 метода синтеза ПИД-регуляторов) и в издании Aidan O’Dwyer 2009 г. [8] (1731 метод синтеза ПИД-регуляторов).
Одним из методов синтеза ПИД-регуляторов, активно развиваемый учеными, является модальный метод [3; 9]. В научных работах, посвященных синтезу регуляторов, отсутствуют соотношения, связывающие значения переходной характеристики и коэффициентов объекта управления с учетом расположения действительных полюсов.
Наиболее распространенными для мобильных, строительных, дорожных, дорожно-строительных машин как объектов управления являются математические модели второго и более высокого порядка [9–13].
Исходное математическое описание системы и постановка задачи. Рассматривается линейная система автоматического управления с передаточной функцией (ПФ) объекта второго порядка.
Передаточная функция объекта управления второго порядка W о ( s ) и ПИД-регулятора Wy ( s ) имеют вид
W o ( » ) =
b 0 5 + b
2 ;
a 0 5 + ai s + a 2
W y ( s ) = K p + K i- + K d S = s
K d S 2 + K p s + K
s
где s – символ преобразования Лапласа; Kp , Ki и Kd – коэффициенты соответственно пропорциональности, интегрирования и дифференцирования.
При последовательном соединении ПФ объекта и ПИД-регулятора образуется разомкнутая система с ПФ следующего вида:
W ( s ) = W o ( s ) W y ( s ) =
K d b о s 3 + ( K d b i + K p b 0) s 2 + ( Kb о + K p b i ) s + K b i
3 2 .
a 0 s + ai s + a 2 s
ПФ замкнутой системы управления с единичной обратной связью
K ( s ) =
W ( s ) 1 + W ( s )
Kb s 3 + ( Kb + Kb > s 2 + ( Kb + Kpb,) s + Kb
( a + K d bi)s 3 + ( a i + K d b i + K A) s 2 + ( a 2 + Kb + K p b i )s + Kb
Исходными данными для синтеза ПИД-регулятора САУ являются ПФ объекта управления Wо (s) второго порядка и заданные показатели качества: перерегулирование и время регулирования.
Решается задача определения значений коэффициентов ПИД-регулятора Kd,Kp,K , обеспечивающих заданные показатели качества по заданным ПФ объекта управления второго порядка Wо (s) и зна- чениям действительных полюсов si = -ni, s2 = -n2, s3 = -n3 ПФ замкнутой системы управления.
Вывод основных соотношений. ПФ замкнутой системы с ПИД-регулятором при задании действительных полюсов представим в виде
K ( s ) =
= K d b о s 3 + ( K d b i + K p b о ) s 2 + ( Kb о + K p b i )s + Kb (1) ( a о + K d b о)( s + П 1)( s + П 2Х s + П э ) .
Введем обозначения с целью упрощения выражения (1):
K d b о ; b = K d b i + K p b о ; a о + K d b о’ Oi a о + K d b0 ’
Kb о + K p b i ; b = Kb i a о + K d b о ’ 03 a о + K d b 0
С учетом обозначений (2) получим в области изображений для переходной характеристики h(s) замкнутой системы с ПИД-регулятором при задании значений действительных полюсов h (s) = Ьоо s + bо1 s + bо2 s + bоэ
( s + n i)( s + П 2)( s + П э ) s '
Характеристическое уравнение замкнутой системы имеет третий порядок. При известных заданных значениях действительных полюсов si =-ni;s 2 =-П2;s з =-Пэ.
Это уравнение имеет следующий вид:
D d ( s ) = ( s - s i)( s - s 2)( s - s 3 ). (3)
Выполнив операцию Collect программы MathCAD, обеспечивающей замену выражения (3) выражением, скомплектованным по базису переменной, получим следующее выражение:
Dd ( s ) collect, s ^ s 3 + (ni + n2 + П 3 ) s 2 +
+ [ П з( П 1 + n 2)+ n i n 2] s + n i n 2 П э .
К такому виду приводится характеристическое уравнение корректируемой системы:
( 0 )+ K d b 0) s 3 + ( a i + K d b i+ K p b o) s 2 + ( a 2+ K l b 0 + K p b i ) s + Kb i 0 )+ K d b 0
3 f ai + Kdbi + Kpbo К = s +1I s +
I a о + K d b о )
' a 2 + K b о + K p b i ) Kb
I s +.
, a о + K d b о J a о + K d b 0
Приравнивая коэффициенты при одинаковых степенях s , получим следующие равенства:
a + K d b i + K p b 0 a 0 + K d b 0
a 2 + K i b 0 + K p b i a 0 + K d b 0
= n i + n + П з ;
= П з (П 1 + П 2 ) + П 1 П 2 ;
K i b 1
a 0 + K d b 0
= П 1 П 2 П з -
Определим установившееся значение hstab переходной характеристики h ( t ) при задании действительных полюсов в соответствии с теоремой предельного перехода:
lim( 5 ■ h ( 5 )) i---------- i -1--------;
s ’" П 1 П 2 П з( a 0 + K d b 0 )
Определение составляющих переходной характеристики замкнутой САУ с ОУ второго порядка. Определим составляющие переходной характеристики h ( t ) замкнутой системы с ПИД-регулятором при задании действительных полюсов в среде программы MathCAD:
lim [ ( s + n) h ( s ) ] simplify i s i- щ
( b 1 - b 0 П 1Х K d П 2 - K p П 1 + K i )
i-------------------------;
П 1( П 1 - П2ХП 1 - П з)( a 0 + K d b 0 )
lim [(s + п2 )h(s)] simplify i s ^-П2
( b - b 0 П 2 )( K d П 2 - K p П 2 + K i )
i--------------------------;
П 2( П 1 - П2ХП 2 - П з)( a 0 + K d b 0 )
тогда установившееся значение hstab
. = stab
K i b 1 .
П 1 П 2 П з( a 0 + K d b 0 )-
lim [ ( s + Пз) h ( s ) ] simplify ^
( b 1 - b 0 П з )( K d П з2 - K p П з + K ) i-------------
.
В соответствии с равенством (5)
Kb
-----= П 1 П 2 П з , a 0 + K d b 0
подставляя (7) в (6), получим h = Kb = П1П2 Пз = 1
5tab П 1 П 2Ы a 0 + K d b 0 ) П 1 П 2 П з
.
П з( П 1 - П з)( П 2 - П з)( a 0 + K d b 0 )
Обозначим установившееся значение hstab в соответствии с (6)
/7 . = stab
ib 1
П 1 П 2 П з( a 0 + K A)’
Полученный результат (8) подтверждает, что рассматриваемая замкнутая система управления является астатической относительно входного воздействия.
Определим начальное значение hinit переходной
тогда составляющая h η1 ( t ), обусловленная полюсом s 1 = –η 1 ,
, „ ( b 1 - b 0 П 1)( K d П 12 - K p П 1 + K i ) . h П ( t ) =------------------------------------ e
1 П 1( П 1 - П 2)( П 1 - П з)( a 0 + K d b 0 )
'-П 1 t ; (9)
характеристики h ( t ) в соответствии с теоремой предельного перехода для случая задания действительных полюсов:
lim( s ■ h 1 ( s )) i K d b 0 ,
5 ^” a 0 + K d b 0
т. е.
K d b 0
init Tr 1 - a 0 + Kdb0
составляющая h η2 ( t ), обусловленная полюсом s 2 = –η 2 ,
, „ ( b 1 - b 0 П 2)( K d П 22 - K p П 2 + K i ) - h П, ( t ) =------------------------------------- e
2 П 2( П 1 - П 2)( П 2 - П з)( a 0 + K d b 0 )
■-П 2 t ; (10)
составляющая h η3 ( t ), обусловленная полюсом s 3 = –η 3 ,
, „ (b1 -Ь0Пз)(KdПз2 -KpПз + Ki) _ hП (t) =---------------------------------e з Пз(П1 -Пз)(П2 -Пз)(a0 + Kdb0)
,-П з t
Доказано, что для рассматриваемой задачи синтеза ПИД-регулятора системы управления с ОУ второго порядка справедливо условие h init < h ( t ) < 1 при установившемся значении hstab = 1. Это выражение не зависит от типа заданных полюсов.
Таким образом, значение переходной характеристики замкнутой системы с ПИД-регулятором изменяется во времени от hinit до hstab = 1. При этом если значение b 0 = 0 , то начальное значение переходной характеристики hinit = 0 .
Очевидно, что при некотором значении b 0 hinit войдет в 5%-ную зону установившегося значения. Это свидетельствует о возможности значительного уменьшения времени переходного процесса при b 0 не равном 0.
Таким образом, для случая действительных полюсов выражение переходной характеристики h ( t ) примет следующий вид:
h ( t ) = h init + h n ( t ) + h n2( t ) + h пз( t ) -
Методика синтеза ПИД-регулятора для случая действительных полюсов. Значения всех трёх полюсов являются действительными:
s 1 =- П 1 ; s 2 = - П 2 ; s з =- П з -
Представим равенства (5) в виде системы уравнений, в которой неизвестными являются значения коэффициентов ПИД-регулятора:
K d [ b 1 - b 0 СП 1 + П 2 + П з)] + K p b 0 = a 0( П 1 + П 2 + П з ) - a 1 ;
- K d b 0 ( П з( П 1 + П 2 ) + П 1 П 2 ) + K p b 1 + K i b 0 =
= a 0( П з( П 1 + П 2 ) + П 1 П 2 ) - a 2 ;
- K d b 0 П 1 П 2 П з + Kb = a 0 П 1 П 2 П з - (13)
Введем обозначения с целью представления системы уравнений (13) в матричной форме:
Xn = b - b A + П 2 + П з ); ^ 12 = b 0 ;
X 13 = 0; C i = a о (П 1 + П 2 + П з ) - «V;
^ 21 =- b 0 ( ПзОи + П 2 ) + П 1 П 2 ) ; ^ 22 = b 1 ;
X 23 = b 0 ; C 2 = a 0( П з( П 1 + П 2 ) + П 1 П 2 ) - a 2 ;
X 31 = b 0n1n2Пз ; X 32 = 0; X 33 = b 1 ;
C 3 = a 0 П 1 П 2 П 3 .
|
С учетом о |
бозначений |
(14) сформируем матрицы: |
|
'^ 11 Л d = ^ 21 |
^ 12 ^ 13 ^ X 22 X 23 |
fCl ( K d 1 ; c d = = 2. ; к 1 = к , , (15) |
|
4^ 31 |
X 32 Х зз у |
1 C 3 J 1 Ki у |
где Л d и C d - матрица и вектор-столбец известных параметров объекта управления и заданных значений действительных полюсов соответственно; К 1 – вектор-столбец искомых значений коэффициентов ПИД-регулятора.
Матричное уравнение для определения искомых значений коэффициентов регулятора имеет вид
(Л d ■ K1) = Cd, а его решение представляется в виде
K 1 =Л d - 1 C d .
Система уравнений (5) значительно упрощается при b 0 = 0:
a + Kdb
-—— = П 1 + П 2 + П з ;
a 0
a 2 + Kpb 1
-----------= П 3 СП 1 + П 2 ) + П 1 П 2 ;
a 0
K
-----= П 1 П 2 П 3 .
a 0
В этом случае формулы для определения значений коэффициентов ПИД-регулятора имеют следующий вид:
C 1 a 0( П 1 + П 2 + П з ) - a 1 .
Ka = -- = ------------------;
d b 1 b 1
- = c 2 = a 0 [ П з (П 1 + П 2 ) + П 1 П 2 ] - a 2 . p b 1 b 1 ;
K = C 3 = a 0 П 1 П 2 П з i b 1 b 1
Получены выражения для расчета коэффициентов ПИД-регулятора, включающие коэффициенты ПФ объекта второго порядка при заданных значениях действительных полюсов. Выполнена проверка рассмотренной методики на конкретном примере.
Пример 1. Задан объект управления второго порядка с ПФ
W o ( » ) =
b 0 5 + b 1
a 0 5 + a 1 5 + a 2
0,01 5 + 0,7 0,04 5 2 + 0,12 5 + 1"
Требуется синтезировать ПИД-регулятор, который обеспечит переходную характеристику без перерегулирования, а время регулирования t p = 3 c.
Для реализации метода синтеза применены зависимости (11), (12). Расчеты выполнены в среде программы MathCAD.
Исходные данные для действительных значений полюсов: значение η1 определено с учетом желаемого времени регулирования, равного 3 с, и расчета по известной приближенной формуле [14–16]:
t р
3 Re( s ),
П 1 = Re ( 5 ),
где Re( s )– действительная часть полюса, наиболее приближенного к мнимой оси корневой плоскости; значения η2 и η3 определяются из требуемого значения перерегулирования и влияния этих полюсов на полюс η1 :
П 1 = 1; n2 = 4; n3 = 5; b = 0,7; b 0 = 0,01; a 0 = 0,04; a 1 = 0,12; a 2 = 1,0.
Для заданных действительных полюсов определены коэффициенты ПИД-регулятора
|
f K d 1 |
' 0,46 л |
|||
|
К 1 = |
K p |
= |
0,401 |
; |
|
. K i у |
. 1,274 > |
|||
|
K d = 0,46; |
K p = |
0,401; Ki |
= 1,274 |
|
Установившееся значение h5tob = 1.
Выполнено моделирование переходного процесса для периода времени t = 0–5 с, шаг 0,001 с.
Cоставляющие hη1 (t), hη2 (t), hη3 (t), обусловлен- ные действительными полюсами 51 = - n1, 52 = - п2, 53 = — П3, определяются по зависимостям (9)-(11).
Переходная характеристика h ( t ) при заданных действительных полюсах получена по выражению (12).
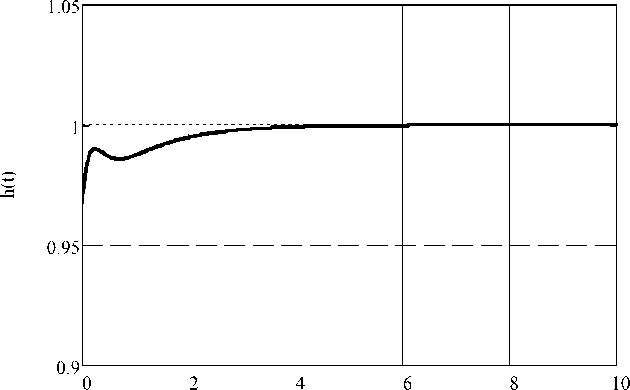
При t = 0 получим h ( t ) = h 5tab + h n 1 ( t ) + h n 2( t ) + + h n 3( t ) = 0,973.
Начальное значение hinit переходной характеристики h ( t )
h init
K d b 0 = 0,973 a 0 + K d b 0
На рис. 1 представлен график переходной характеристики h ( t ) замкнутой САУ с синтезированными параметрами ПИД-регулятора.
Пример 2 . Исследование переходного процесса при изменении значения полюса η1 .
Для исследования влияния на переходный процесс системы заданного значения действительного полюса
η1 в диапазоне 1–4 проведено моделирование для периода времени t = 0,0.001 - 5.
На рис. 2 представлен график переходной характеристики h ( t ) замкнутой САУ с синтезированными параметрами ПИД-регулятора при заданных значениях полюса П 1 ( etal) = 1,2, 3,4 .
Пример 3 . Исследование переходного процесса при изменении значения коэффициента b 0 ПФ объекта управления. Для исследования влияния на переходный процесс системы значения коэффициента b 0 ПФ объекта управления в диапазоне 0,10–0,80 проведено моделирование для периода времени t = 0,0.001 - 5.
Результаты моделирования переходного процесса h(t) замкнутой САУ с синтезированными параметрами ПИД-регулятора приведены на рис. 3 при задан- ных значениях коэффициента b0 ПФ ОУ. Получены следующие оценки переходной характеристики с учетом 5%-ной зоны:
время регулирования:
t р = 0 c при b 0 = 0,10;
t р = 0,08 c при b 0 = 0,20;
t р = 1,69 c при b 0 = 0,30;
t р = 1,75 c при b 0 = 0,40;
t р = 1,59 c при b 0 = 0,50;
t р = 0,69 c при b 0 = 0,60;
t р = 0 c при b 0 = 0,70;
t р = 1,0 c при b 0 = 0,80.
t, s
Рис. 1. График переходной характеристики синтезированной системы с заданными действительными полюсами
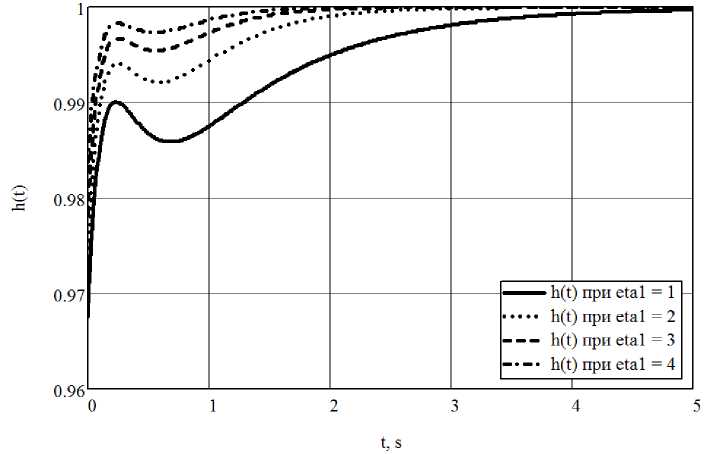
Рис. 2. Графики переходной характеристики синтезированной системы с заданными действительными полюсами при значениях полюса П1 (eta1) = 1, 2, 3, 4
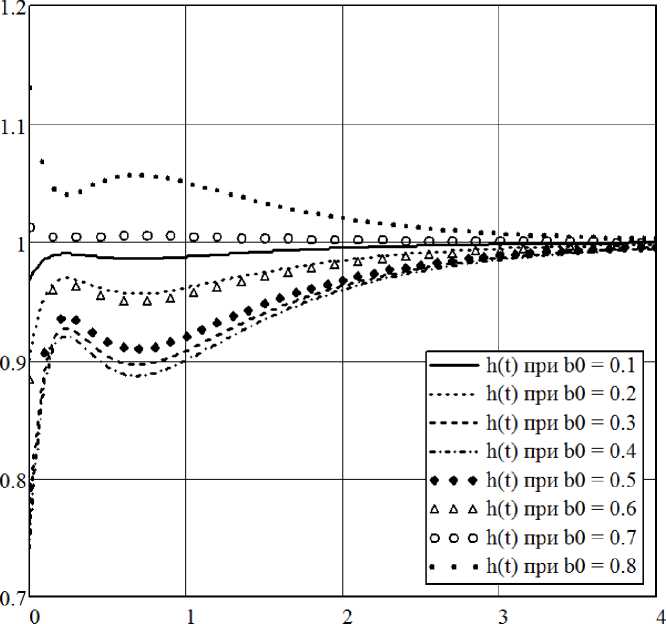
Рис. 3. Графики переходной характеристики синтезированной системы с заданными полюсами при значениях коэффициента b 0 ПФ объекта управления в диапазоне 0,10–0,80
Увеличение значения коэффициента b 0 ПФ ОУ больше 0,7 приводит к появлению перерегулирования. При значении коэффициента b 0 , равном 0,8, переходная характеристика начинается с h (0) = 1,13 , появляется перерегулирование. Полученные результаты показывают возможность прогнозирования коэффициентов ПФ ОУ с учетом значений коэффициентов ПИД-регулятора.
В соответствии с разработанной методикой синтеза ПИД-регулятора переходный процесс носит апериодический характер. При известном значении b 0 , заданных параметрах объекта второго порядка и действительных полюсов в рассмотренном в примере время переходного процесса, исходя из условия 5%-ной зоны установившегося значения, равно 0 с.
Заключение. Предложен метод модального синтеза параметров ПИД-регулятора по заданным значениям параметров объекта второго порядка и действительных полюсов замкнутой системы управления. Методика синтеза реализована в программной среде MathCAD.
Имитационное моделирование показало, что при некотором значении b 0, не равном 0, начальное значение переходной характеристики hinit войдет в 5%-ную зону установившегося значения. Это свидетельствует о возможности значительного уменьшения времени переходного процесса.
Список литературы Методика синтеза регуляторов для объектов второго порядка
- Ziegler J. G., Nichols N. B. Optimum settings for automatic controllers//Transactions of the American society of mechanical engineers. 1942. Vol. 64. P. 759-768.
- Astrom K. J., Hagglund T. Advanced PID Control. Research Triangle Park, North Carolina: The Instrumentation, Systems, and Automation Society, 2006. 354 p.
- Вадутов О. С. Синтез ПИД-регулятора в системах с запаздыванием методом условной оптимизации с ограничениями на размещение полюсов//Известия Томского политехнического университета. Информационные технологии. 2014. Т. 325, № 5. С. 16-22.
- Филипс Ч., Харбор Р. Системы управления с обратной связью. М.: Лаборатория базовых знаний, 2001. 616 с.
- Воронов А. А. Основы теории автоматического управления. Автоматическое регулирование непрерывных линейных систем. М.: Энергия, 1980. 309 с.
- Лукас В. А. Теория автоматического управления. М.: Недра, 1990. 416 с.
- O’Dwyer A. Handbook of PI and PID Controller Tuning Rules. London: Imperial College Press, 2006. 564 p.
- O’Dwyer A. Handbook of PI and PID Controller Tuning Rules. London: Imperial College Press, 2009. 623 p.
- Прокопьев А. П., Иванчура В. И., Емельянов Р. Т. Синтез ПИД-регулятора для объектов второго порядка с учетом расположения полюсов//Журнал СФУ. Техника и технологии. 2016. Т. 9, № 1. С. 50-60. DOI: 10.17516/1999-494X-2016-9-1-50-60.
- Замятин Д. В., Ловчиков А. Н. Методика синтеза оптимальных по быстродействию систем//Вестник СибГАУ. 2005. № 4. С. 28-30.
- Замятин Д. В., Ловчиков А. Н. Определение параметров корректирующего устройства для системы четвертого порядка, оптимальной по быстродействию//Вестник СибГАУ. 2006. № 4 (11). С. 18-20.
- Замятин Д. В., Ловчиков А. Н. Синтез оптимальных по быстродействию систем высокого порядка//Вестник СибГАУ. 2013. № 2 (48). С. 24-28.
- Иванчура В. И., Прокопьев А. П. Оптимизация следящей системы автоматического управления//Вестник СибГАУ. 2011. № 5 (38). С. 44-49.
- Ефимов С. В., Замятин С. В., Гайворонский С. А. Синтез ПИД-регулятора с учетом расположения нулей и полюсов системы автоматического регулирования//Известия Томского политехн. ун-та. 2010. Т. 317, № 5. С. 102-107.
- Ефимов С. В., Гайворонский С. А., Замятин С. В. Задачи корневого анализа и синтеза систем автоматического управления//Известия Томского политехн. ун-та. 2010. Т. 316, № 5. С. 16-20.
- Удерман Э. Г. Метод корневого годографа в теории автоматических систем. М.; Л.: Госэнергоиздат, 1963. 112 с.
