Методологические и технологические основы создания адаптивных интеллектуальных систем обучения сложным технологическим процессам на основе компьютерных тренажерных систем

Автор: Липовская Елена Петровна
Журнал: Технико-технологические проблемы сервиса @ttps
Рубрика: Организационно-экономические аспекты сервиса
Статья в выпуске: 1 (15), 2011 года.
Бесплатный доступ
Рассмотрена модель комплексного навыка принятия решений, на основе организации интеллектуальной динамической обратной связи, позволяющая осуществить переход к высокоинтуитивным схемам обучения сложным технологическим процессам сервиса. Разработаны методологические и алгоритмические основы создания адаптивных интеллектуальных систем обучения сложными технологическими процессами. Приведен сравнительный анализ эффективности предлагаемых решений.
Технологический процесс, модель комплексного навыка принятия решений, адаптивная интеллектуальная система обучения, компьютерная тренажерная система
Короткий адрес: https://sciup.org/148185902
IDR: 148185902 | УДК: 004.896
The bases of methodological and technological adaptive intellectual systems of training to difficult technological processes based on computer training systems
The model of complex skill decision-making, on the basis of the organization of the intellectual dynamic feedback is considered, allowing to carry out transition to highly intuitive schemes of training to difficult technological processes of service. Methodological and algorithmic bases of creation the adaptive intellectual systems of training are developed by difficult technological processes. The comparative analysis of efficiency the offered decisions is resulted.
Текст научной статьи Методологические и технологические основы создания адаптивных интеллектуальных систем обучения сложным технологическим процессам на основе компьютерных тренажерных систем
Актуальность проблемы построения компьютерных тренажерных систем для обучения сложным технологическим процессам определяется двумя отчетливыми тенденциями последних лет. С одной стороны, ощущается все более острая потребность качественного улучшения подготовки специалистов, вызванная постоянным усложнением самих технологических процессов и появлением новых систем управления ими. С другой стороны, впечатляющие, инновационные успехи ключевых информационных технологий создают принципиальную возможность создания полноценных систем компьютерного тренинга, превосходящих по эффективности все известные формы обучения, включая не всегда доступные и потенциально опасные тренировки на реальных объектах. Создалась в некотором смысле парадоксальная ситуация, когда никаких ограничений для создания отдельных компонентов тренажеров практически не существует, в то время как теоретически обоснованные критерии, принципы и методики построения и обучения на их основе тренажерных систем недостаточно разработаны. В результате, работы по созданию столь сложных и трудоемких продуктов тормозятся из-за отсутствия новых, инновационных методологий их построения, страдают от недоучета принципиальных факторов, определяющих успех тренинга, и напрасно- го дублирования усилий на реализацию устаревших, стандартных и типовых компонентов систем.
Основная сложность построения подобных систем состоит в крайней синтетичности технологии компьютерного тренинга, для успеха которого каждый компонент системы должен быть реализован на одинаково высоком уровне. Так, обладая совершенными математическими моделями процессов и не решив проблемы их связи с обучаемым специалистом в режиме реального времени, невозможно добиться эффективного формирования навыков обучения. В то же время, располагая и моделями и мощной аппаратнопрограммной тренажерной платформой, но, не имея адекватной методики компьютерного тренинга, нельзя рассчитывать на закрепление и перенос приобретаемых навыков и умений в реальную практику.
Трудно найти другое направление исследований и разработок в области управления ТП, которое вобрало бы в себя столь разнообразные по сути и исполнению составные части. Компьютерный тренинг (обучение) предполагает:
-наличие высокоточных математических моделей широкого круга процессов, обладающих ярко выраженной технологической и управленческой спецификой;
-
- реализацию указанных моделей в режиме имитации;
-
- воссоздание рабочего места обучаемого оператора процесса, подобного (психологически и, отчасти, физически) его рабочему месту в реальном процессе, включая организацию операторского интерфейса и органов управления;
-
- создание соответствующего рабочего места инструктора обучения, осуществляющего контроль и управление тренингом;
-
- наличие методической и дидактической базы компьютерного обучения, учитывающей специфику процессов принятия решений, научения и переноса навыков специалистами ТП;
-
- разработку методов анализа и оценки результатов тренинга.
Другая проблема, существенно усложняющая задачу синтеза данных систем, состоит в следующем. Хотя они объединяют, по существу, технические компоненты, критерий качества тренажерных систем нельзя искать в сугубо технических рамках, поскольку формирование, закрепление и положительный перенос приобретаемых навыков определяется прежде всего степенью подобия деятельности специалиста в ТП и обучаемого в тренинге. Вместе с тем существует определенный разрыв между разработками в области моделирования динамических процессов, создания пользовательских интерфейсов и средств поддержки инструктирования, с одной стороны, и, по преимуществу, когнитивными исследованиями механизмов формирования и переноса навыков, в особенности комплексных схем - с другой.
В случае обучения сложным ТП на базе компьютерных тренажеров можно говорить о необходимости формирования сложной комплексной системы навыках, которые в совокупности с уже имеющимися и приобретаемыми в ходе трудовой деятельности и тренировок знаниями образуют профессиональные умения. Суть компьютерного тренинга, собственно, и состоит во вплетении знаний в предметную деятельность, что позволяет говорить о тренинге операторов не только на уровне простейших навыков, но и на уровне знаний.
Наиболее полно представленные проблемы освещены в работах профессора В.М. Дозорцева [1], которым предложена следующая классификация деятельности обучаемых сложным ТП по типу формируемых профессиональных навыков [1], представленная в табл. 1.
Взаимосвязь базовых навыков, необходимых оператору для успешного управления технологическим объектом, а также скорректированная схема формирования комплексного навыка принятия решений [1], предложенная профессором В.М. Дозорцевым, показаны на рис. 1. и 2. соответственно.
Таблица 1 – Классификация деятельности обучаемых ТП по типу формируемых профессиональных навыков
|
Этапы принятия решений |
действия |
Тип навыка |
Ведущие когнитивные процессы |
Источники инфор мации |
Обьект воздействия |
|
Обнаружение |
Контроль |
Ориентирование |
Сенсорно-перцептивные процессы Внимание Память опознание |
Технологический обьект (тренажерная модель) |
Система знаконоси-телей |
|
Распознавание отклонений |
Распознавание отклонений |
||||
|
диагностика |
Генерация и проверка гипотез |
Поиск причин неисправностей |
Мыслительные процессы принятия решений (без дейст вия на обь-ект) |
Технологический обьект (тренажерная модель) и мысленная модель |
Мысленная модель |
|
Прогнозирование последствий |
Мысленная модель |
||||
|
компенсация |
Планирование |
||||
|
испол нение |
Исполнение процедур |
Сенсорно-перцептивные процессы Внимание Память опознание |
Технологический обьект (тренажерная модель) |
Технологический обь-ект (тренажерная модель) |
|
|
ориентирование |
Система знаконоси-телей |
В процессе взаимосвязи базовых навыков, два навыка нижнего уровня (ориентирование и прогнозирование последствий) входят как составные элементы в навыки верхнего уровня — распознавания отклонений, поиска причин неисправностей, планирования и исполнения процедур. И хотя, как отмечалось выше, необходимо развивать каждый из них в отдельности, формирование комплексного навыка принятия решений в компьютерном тренинге вовсе не отменяется. Наоборот, оно приобретает наиболее эффективную и логически завершенную форму, поскольку основывается на возможности смоделировать динамический отклик объекта и системы управления (СУ) на произвольные управляющие воздействия оператора и вмешательства инструктора.
Схема формирования комплексно- го навыка принятия решений (см. рис. 2) предполагает, что достаточно богатые и правильные эталоны нормального состояния и мысленная модель объекта уже имеются у оператора перед началом тренинга как результат предварительно обучения и практического опыта. Механизм формирования комплексного навыка явным образом включает схемы наработки базовых навыков верхнего уровня и неявным – нижнего уровня (ориентирование и прогнозирование последствий). Это объясняется вышеупомянутыми свойствами навыков нижнего уровня — они, во-первых, имеют инструментальный характер, а, во-вторых, формируются и поддерживаются в процессе выполнения оператором действий на основе навыков верхнего уровня, в которые они включены.

Рисунок 1 - Взаимосвязь базовых навыков оператора
Хотя процесс принятия решений замкнут, т.е. исполнение процедур управления переходит в контроль системы знаконосителей, анализ механизма формирования комплексного навыка начнем со стадии обнаружения. Оператор может наблюдать поведение моделируемого объекта через систему знаконосите-лей по выходам тренажерной модели и воздействовать на нее через эмулируемые исполнительные органы.
Если сличение наблюдаемых по тренажерной модели симптомов S с эталонами нормального состояния Si не позволяет определить нарушение хода процесса, оператор остается в цикле контроля и модификации эталонов. Распознавание отклонения переводит его действия в цикл генерации и проверки гипотез, где выявленная симптоматика S сличается с откликами мысленной модели S2 на текущие гипотетические воздействия. Пока рассогласования остаются значительными, идет модификация гипотез; при достижении допустимой точности конечная гипотеза принимается и действия оператора переходят в цикл генерации планов компенсации. Здесь отклики мысленной модели S3 на текущие планируемые воздействия сличаются с желаемыми состояниями объекта S'3 в виде цели процедуры компенсации по конечной гипотезе. Процесс модификации планов продолжается, пока близость состояний не будет достигнута; после того, как план выбирается, оператор переходит в цикл исполнения процедуры. Здесь последовательные пункты плана реализуются путем прямого воздействия на тренажерную модель. По ходу исполнения отклики тренажерной модели на воздействия оператора S сличаются с выходами задающего устройства S4, связанного с выполняемым планом. При наличии значительного расхождения через блок перешиф-ровки происходит выбор необходимых воздействий на объект; при достижении с заданной точностью требуемого состояния оператор переходит к следующему пункту плана, а при окончании плана возвращается в цикл контроля.
С инструментальной и методической точки зрения типовая модель профессора В.М. Дозорцева обучения слож- ным ТП, предполагает, что все типы предлагаемых оператору задач должны оформляться в виде тренировочного упражнения, т.е. некоторого задания, содержащего конкретные цели тренинга и методы их достижения. Данное ключевое понятие элемента тренинга объединяет и обучение длительным регламентным процедурам и отработку единичных технологических действий. Именно в форме заранее созданных упражнений может быть по мнению профессора В.М. Дозор-цева передан пользователю методический материал обучения; так же как опыт, приобретаемый инструктором по ходу тренинга, может накапливаться только во вновь создаваемых упражнениях, что является обязательным элементом набора инструкторских средств в современных тренажерных системах.
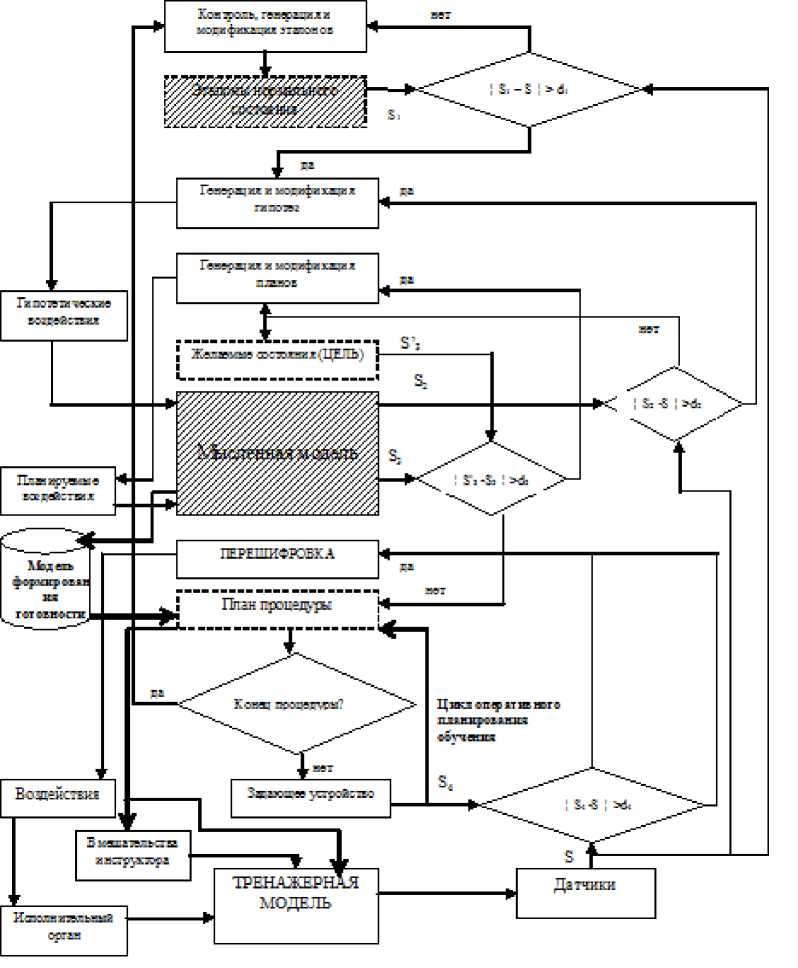
Рисунок 2 – Скорректированная модель комплексного навыка принятия решений: S – наблюдаемые сигналы; S 1 – эталонные состояния нормального состояния; S 2 , S 3 – выходные сигналы мысленной модели; S’3 – желаемые состояния объекта; S4 – установки; d1, d2, d3, d4, – пороги рас-познования отклонений, адекватности гипотезы, адекватности плана и рассогласования при исполнении, соответственно.
Во всех случаях тренировочное упражнение предполагает осуществление оператором известной совокупности действий по принятию решений; логично поэтому, что состав и последовательность элементов упражнения должны определяться механизмом этих действий. Какая часть информации, содержащейся в упражнении, будет предоставляться оператору, зависит от формы тренинга, выбранной инструктором, реализованной в виде модели взаимодействия инструкторского интерфейса с обучаемым. Например, при отработке пуска установки оператору необходимо явным образом сообщить задачу и, возможно, предоставить всю процедуру (научение по принципу факсимиле, или отработка стандартных процедур). В самом общем виде, в основе современной структурной организации схем формирования навыков принятия решений, в том числе и комплексных, лежит следующая математическая модель процесса обучения (рис. 3.). На понятийном уровне ее можно сформулировать следующим образом:
на основании текущего состояния обучаемого и методики обучения генерируется очередная задача (ситуация), требующая действий обучаемого;
ответ обучаемого сравнивается с эталонным решением, и на основании различий диагностируются ошибки обучаемого;
по результатам диагностики методом обратной связи корректируются текущие характеристики обучаемого.

Обратная связь
(системообразующая основа обучения )
Рисунок 3 - Математическая модель процесса обучения
Основной недостаток, предложенной профессором Дозорцевым, и других широко известных в этой области, моделей обучения и функциональноинформационных структур, реализующих такие модели, заключается в слабой проработке и реализации, как с методологической, так и технологической точки зрения, обратной связи процесса обучения, представляющей собой важный системообразующий элемент обучения.
В современных условиях реализация данного элемента требует применения особых, инновационных подходов и методов. Развитие данного элемента с точки зрения реализации функций обучения, контроля и тестирования обучаемых должно быть связано с созданием динамической адаптивной модели обучения, обеспечивающей реализацию следующих функциональных возможностей:
-
1. Эффективный учет личностных
-
2. Возможность динамического регулирования процессом обучения, посредством специальных корректирующих обучающих воздействий, направленных на развитие отдельных личностных характеристик обучаемого.
-
3. Использование нелинейных алгоритмов обучения.
-
4. Динамический селективный отбор на каждой стадии обучения, тех навыков и умений, которые должны приобрести обучаемые, в соответствии с комплексной моделью обучения,
-
- с учетом, которых возникает необходимость корректировки (рис. 2., выделенное жирным) типовой схемы формирования комплексного навыка принятия решений посредством введения двух до-
- полнительных контуров:
(когнитивный, психофизиологических и т.д.) характеристик обучаемого, при выборе и формировании обучающих стратегий и воздействий.
-
1. Контур оперативного планирования обучения.
-
2. Контур формирования готовности.
Целью предложенных корректировок является переход от традиционного компьютерного тренинга в виде предъявляемых оператору динамических ситуаций на моделируемом объекте и приемам формирования отдельных базовых навыков, к полномасштабной реализации комплексной схемы формирования профессиональных навыков обучения, на основе организации динамической обратной связи. Для реализации этой идеи недостаточно простого переноса на компьютер упражнений по каждому отдельному навыку, т.к. вырванные из контекста принятия решений такие упражнения «зависают» без интеллектуально ориентированного, динамического управления [3,4] процессом обучения на основе универсальной модели обучения, связанной в том числе, с особенностями психофизиологической и интеллектуальной готовности обучаемого и т.д.
В рамках предложенных корректировок предлагается следующий вариант реализации блока планирования процедур обучения (рис. 2), на основе создания адаптивных интеллектуальных систем [3,4] обучения сложными технологическими процессами (АИСО ТП), представленной на рис. 4. Упрощенный алгоритм обучения на основе АИСО ТП представлен на рис. 5.
Для реализации нелинейных алгоритмов обучения на основе АИСО ТП предполагается использование нечеткой логики, как математического аппарата хорошо зарекомендовавшего себя при реализации сложных нелинейных зависимостей, в различных сферах и областях [4].
Далее представлен упрощенный (учитывающий лишь в самом общем виде особенности психофизиологической и интеллектуальной готовности обучаемого и т.д.) вариант модели интеллектуально ориентированного, динамического управления процессом обучения на основе нечеткой логики.
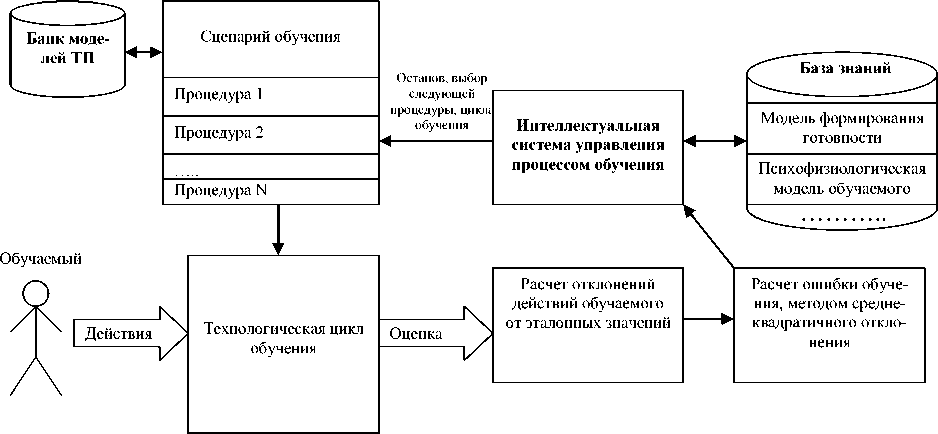
Рисунок 4 – Схема АИСО ТП
Методологические и технологические основы создания адаптивных интеллектуальных систем обучения сложными технологическими процессами на основе компьютерных
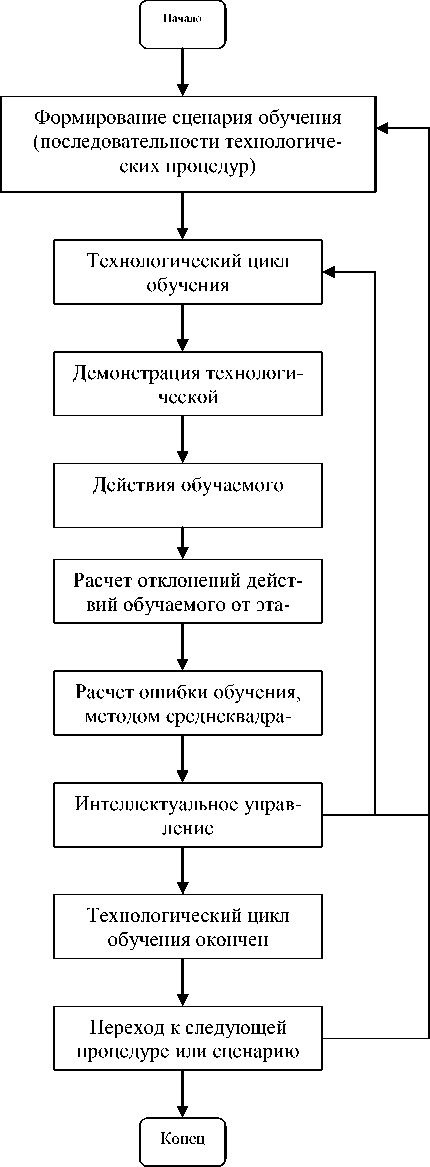
Рисунок 5 - Алгоритм обучения АИСО сложными технологическими процессами
Чтобы учесть (в самом общем виде) в предложенной модели особенности психофизиологической и интеллектуальной готовности обучаемого, необходимо рассматривать в качестве выходного параметра управления не толь- тренажерных систем ко оценку обучения, но и скорость ее изменения. В этом случае эмпирические знания процесса обучения могут быть представлены в форме следующих эвристических правил:
-
1. Если ошибка обучения высокая, а скорость ее изменения положительная, то следует изменить вектор обучения на очень большой угол влево относительно эталонного варианта.
-
2. Если ошибка обучения очень высокая, а скорость ее изменения отрицательная, то следует изменить вектор обучения на небольшой угол влево относительно эталонного варианта.
-
3. Если ошибка обучения высокая, а скорость ее изменения положительная, то следует изменить вектор обучения на большой угол влево относительно эталонного варианта.
-
4. Если ошибка обучения высокая, а скорость ее изменения отрицательная, то следует остановить процесс обучения и провести коррекцию сценария обучения.
-
5. Если ошибка обучения очень высокая, а скорость ее изменения отрицательная, то следует изменить вектор обучения на очень большой угол вправо относительно эталонного варианта.и т.д.
Для формирования базы правил системы нечеткого вывода необходимо предварительно определить входные и выходные лингвистические переменные. Очевидно, в качестве одной из входных лингвистических переменных следует использовать ошибку обучения: p1 — "ошибка обучения", а в качестве второй входной лингвистической переменной р2— "скорость изменения ошибки обучения". В качестве выходной лингвистической переменной будем использовать изменение вектора обучения относи- тельно эталонного варианта: р3 - "изменение вектора обучения относительно эталонного варианта ".
В этом случае система нечеткого вывода будет содержать 15 правил нечетких продукций следующего вида: ПРАВИЛО 1: ЕСЛИ "p1 есть РB" И "p2 есть PS" TO "p3 есть NB" , ПРАВИЛО_2: ЕСЛИ "p1 есть РВ" И "p2 есть NS" TO "p3 есть NS" , ПРАВИЛО_3: ЕСЛИ "p1 есть PS" И "p2 есть PS" TO "p3 ecmь NM", ПРАВИЛО_4: ЕСЛИ "p1 есть PS" И "p2 ecmь NS" TO "p3 eсmь Z" , ПРАВИЛО_5: ЕСЛИ "p1 есть NB" И "p2 есть NS" TO "p3 есть РВ" , ПРАВИЛО_6: ЕСЛИ "p1 есть NB" И "p2 есть PS" TO "p3 есть PS" , ПРАВИЛО_7: ЕСЛИ "p1 есть NS" И "p2 есть NS" TO "p3 есть РМ", ПРАВИЛО_8: ЕСЛИ "p1 есть NS" И "p2 есть PS" TO "p3 есть Z" , ПРАВИЛО_9: ЕСЛИ "p1 есть РВ" И "p2 есть Z" ТО "p3 есть NM", ПРАВИЛО_10: ЕСЛИ "p1 есть PS" И "p2 есть Z" ТО "p3 есть NS" , ПРАВИЛО_11: ЕСЛИ "p1 есть NB" И "р 2 есть Z" TO "p3 есть PM" , ПРАВИЛО_12: ЕСЛИ "p1 есть NS" И "p2 есть Z" TO "p3 есть PS", ПРАВИЛО_13: ЕСЛИ "p1 есть Z" И "р 2 есть PS" TO "p3 есть NS" , ПРАВИЛО_14: ЕСЛИ "p1 есть Z" И "p2 есть NS" ТО "p3 есть PS" , ПРАВИЛО_15: ЕСЛИ "p1 есть Z" И "p2 есть Z" ТО "p3 есть Z".
В качестве терм-множества первой лингвистической переменной будем использовать множество Т1={"очень высокая", "высокая", "в пределах нормы", "низкая", "очень низкая"} или в символическом виде T1={NB, NS, Z, PS, PB} с функциями принадлежности, изображенными на рис. 6.1. В качестве терм-множества второй лингвистической переменной будем использовать множест- во Т2={"отрицательная", "равна нулю", "положительная"} или в символическом виде T2={NS, Z, PS} с функциями принадлежности, изображенными на рис. 6.2. В качестве терм-множества выходной лингвистической переменной будем использовать множество T3 ={"очень большой вектор влево", "большой вектор влево", "небольшой вектор влево", "останов обучения", "небольшой вектор вправо", "большой вектор вправо", "очень большой вектор вправо"}, или в символическом виде T3={NB, NM, NS, Z, PS, PM, PB} с функциями принадлежности, изображенными на рис. 6.3.
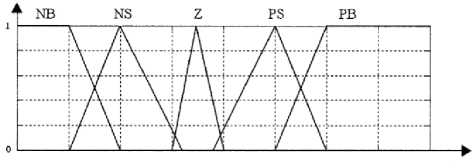
Рисунок 6.1 – График функции принадлежности лингвистической переменной: р1 - "ошибка обучения".
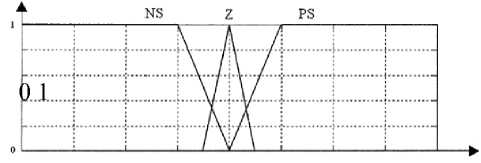
Рисунок 6.2 – График функции принадлежности лингвистической переменной p2 – "скорость изменения ошибки обучения ".
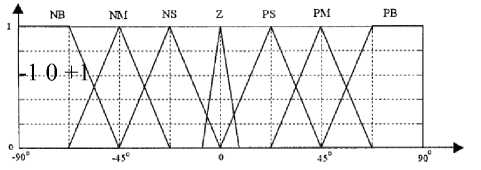
Рисунок 6.3 – График функции принадлежности лингвистической переменной р3 - "изменение вектора обучения относительно эталонного варианта ".
Механизм поиска решений предложенной нечеткой модели может быть достаточно просто реализован унифицированным способом с использованием специализированных инструментариев, например, хорошо известной системы прикладного моделирования
«MATLAB». На рис. 7. представлен пример реализации механизма поиска решений, предложенной нечеткой модели интеллектуально ориентированного, динамического управления процессом обучения в системе «MATLAB».
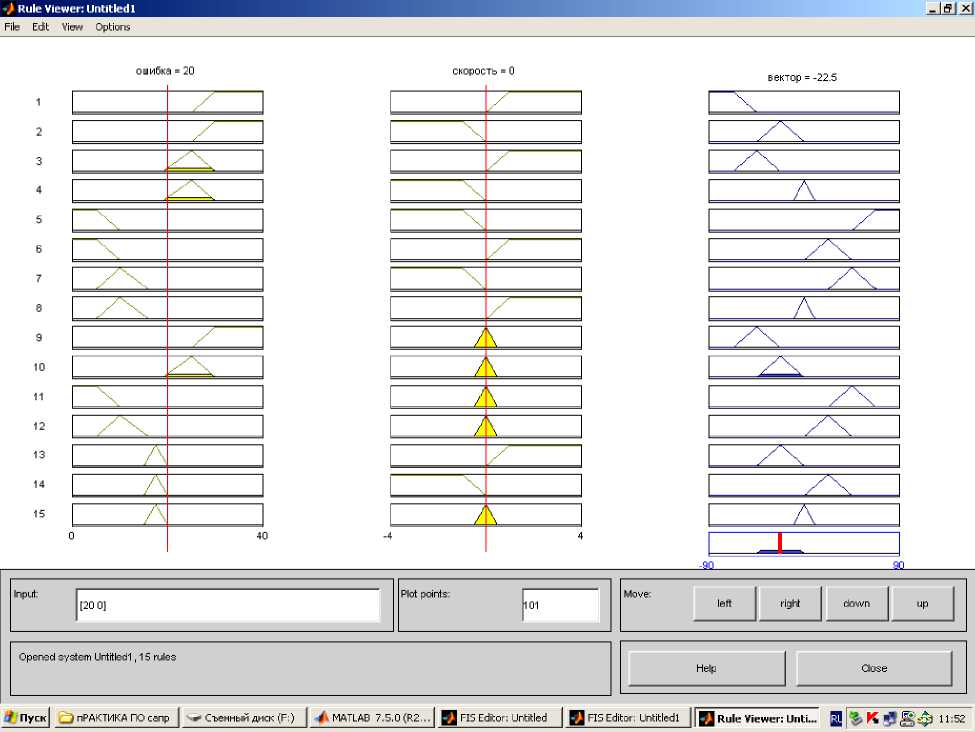
Рисунок 7 – Пример реализации механизма поиска решений нечеткой модели интеллектуально ориентированного, динамического управления процессом обучения в системе «MAT-LAB»
Сравнительный анализ эффективности предлагаемых решений на основе типовой и скорректированных моделей комплексного навыка принятия решений (рис. 2) продемонстрирован на рис. 8. В основе предлагаемых на рис. 8. кривых научения лежит хорошо известный закон итеративного научения предложенный профессором Д. А. Новиковым [5], утверждающий для ряда допущений экспоненциальный вид кривой научения.
Активное применение предложенных решений для организации учебного процесса на факультете сервиса Российского государственного университета им. И. Канта по направлению «Сервис», специализациям: «автосервис», «сервис на предприятиях нефтегазового комплекса» и «сервис в жилищной и коммунальнобытовой сфере», - позволяет сделать следующие выводы: использование предложенных в работе методологических и технологических решений позволяет существенно повысить показатель научен-ности обучаемых ТП сервиса, начиная с некоторого периода обучения (см. рис. 8); предлагаемый подход позволяет обес- печить существенную компенсацию потерь времени на его использование с целью получения общесистемного эффекта, выражающегося в поддержании устойчивости процесса научения как основного требования к процессу подготовки специалистов в области управления сложными ТП.
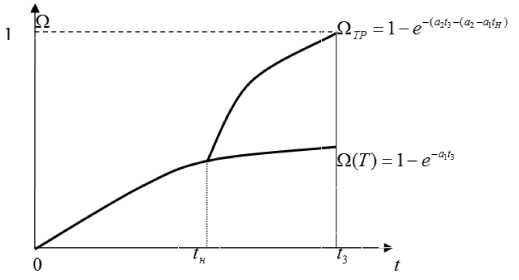
Рисунок 8 – Пример кривых научения: – показатель уровня наученности обучаемого, а а – показатель эффективности учебного процесса данного индивидуума, ТТ ) - вид зависимости уровня наученности от времени занятия ( t ) на основе существующих типовых моделей комплексного навыка принятия решений, ТР – вид зависимости уровня наученности от времени занятия ( t ) на основе скорректированной, посредством АИСО ТП, модели комплексного навыка принятия решений.
Кроме того, предлагаемые решения открывают уникальные возможности компьютерного тренинга позволяя организовать условия для формирования комплексного навыка научения на практически неограниченном множестве динамически развивающихся ситуаций, требующих от оператора задействования как полного набора базовых навыков выполнения отдельных этапов принятия решений, так и умения разрешать возникающую ситуацию комплексно – от ее обнаружения до полной компенсации по- следствий.
В заключении хотелось бы отме тить, что органическим развитием предложенных в работе методологических и технологических решений может быть переход к сложным высокоинтуитивным схемам обучения, подразумевающим переход от классической схемы вида
' восприятие ситуации )---^ распознавание )---^ реакция J к схеме вида, восприятие сшуацшт )---^ реакция )— -н р а спо знав ант ie j в которой процедура распознавания, как составляющая часть акта принятия решения, отсутствует, таким образом, распознавание может считаться следствием принятия решения, а не его необходимым условием, т.е. оно становится вторично, а первичным является принятие решения или формирование сигналов управления исполнительными органами.
Ли t т ература
-
1. Дозорцев В.М. Компьютерные тренажеры для обучения операторов технологических процессов теория, методология построения и использования. Диссертация на соискание ученой степени доктора технических наук. М., 1999. 05.13.01,05.13.06.
-
2. Минкова Е.С. Формирование готовности к риск-менеджменту у инженеров по организации перевозок и управлению па транспорте: Монография. Калининград: Изд-во РГУ им. И. Канта, 2006.—113 с.
-
3. Колесников А. В. , Клачек П. М., Кириков И. А. Гибридные интеллектуальные системы - информационная технология 21 века для решения сложных практических задач. Региональный сборник посвященный 750-летию Кенигсберга, Калининград: сб. научн. трудов. - Калининград, 2005.-с.30-47.
-
4. Колесников А.В., Кириков И.А. Методология и технология решения сложных задач методами функциональных гибридных интеллектуальных систем . - М: ИЛИ РАН, 2007. 387 с.
-
5. Новиков Д.А. Закономерности итеративного научения. М. : Институт проблем управления РАН, 1998.- 77 с.
Липовская Елена Петровна, асcистент кафедры «Автосервис» РГУ, тел.: 8 (4012)
