Методология оценки эффективности внедрения интеллектуальных технологий в организационное управление перевозочного процесса доставки грузов

Автор: Сафиуллин Р.Р., Баширов М.Р., Орешкина А.Д.
Журнал: Технико-технологические проблемы сервиса @ttps
Рубрика: Организационно-экономические аспекты сервиса
Статья в выпуске: 1 (67), 2024 года.
Бесплатный доступ
Интеллектуальные транспортные системы нацелены на повышение эффективности дорожно-транспортного комплекса и обеспечение безопасных и эффективных транспортных услуг. Развивая методологию для инновационных решений, в статье предлагаются стратегии оптимизации и управления интеллектуальными техническими комплексами, обеспечивая эффективное функционирование.
Беспилотные технологии, технические средства контроля, интеллектуальные транспортные системы
Короткий адрес: https://sciup.org/148328241
IDR: 148328241 | УДК: 656.13
Methodology for assessing the effectiveness of implementing intelligent technologies in the organizational management of the transportation process of cargo delivery
Intelligent transport systems are aimed at increasing the efficiency of the road transport complex and providing safe and efficient transport services. Developing a methodology for innovative solutions, the article proposes strategies for optimizing and managing intelligent technical complexes, ensuring efficient operation.
Текст научной статьи Методология оценки эффективности внедрения интеллектуальных технологий в организационное управление перевозочного процесса доставки грузов
Постановка проблемы
Основная задача интеллектуальных транспортных систем (ИТС) – обеспечить наибольшую эффективность работы дорожно-транспортного комплекса повышая уровень и качество удовлетворения потребностей экономики и населения в безопасных и эффективных транспортных услугах.
Появление нового оборудования и программного обеспечения без общих стандартов для технических средств и локальных интеллектуальных автоматических систем ведет к разногласиям в определениях и подходах к созданию комплексных ИТС. Данная ситуация показывает необходимость научно обосновать и создать методологию для решений, имеющих инновационных технический и технологический характер, которые направленны на снижение издержек в процессах создания и использования транспортных систем при изменяющихся их количественных, качественных и структурных характеристик.
В целях оптимизации функционирования
зрелости интеллектуальных технологий в различ-
интеллектуальных технических комплексов автоматического контроля движения были проведены исследования с разработкой методологических основ. Предложенные стратегии рационального применения и эффективного управления данными комплексами основаны на создания системы оценки их эффективности. Формирование таких методологических основ и оптимизация технологий эксплуатации технических средств контроля (ТСК) различных уровней позволят обосновать концептуальный подход. Это в свою очередь сделает возможным эффективное управление функционированием интеллектуальных аппаратных комплексов.
Методология
В результате исследования установлена концепция формирования единой интегрированной информационной системы с учетом развития и ных транспортных подсистемах системах, которая является необходимым условием для эффективной реализации транспортно-технологических процессов доставки грузов. При разработке архитектуры интеллектуальной транспортной системы необходимо сформировать прямую и тесную взаимосвязь экономической и технической целесообразности применения аппаратных комплексов ИТС. Для оценки готовности транспортной инфраструктуры к беспилотным технологиям (БТ) был установлен основной показатель уровня зрелости беспилотных технологий(G), который комплексно определяет суммирование технических и функциональных возможностей транспортной системы, учитывающие "интеллект транспортных средств", "интеллект инфраструктуры и дороги", "системная интеграция" и "сетевая взаимосвязь". Сформирована четырехмерная модель оценки эффективного внедрения БТ (Рис
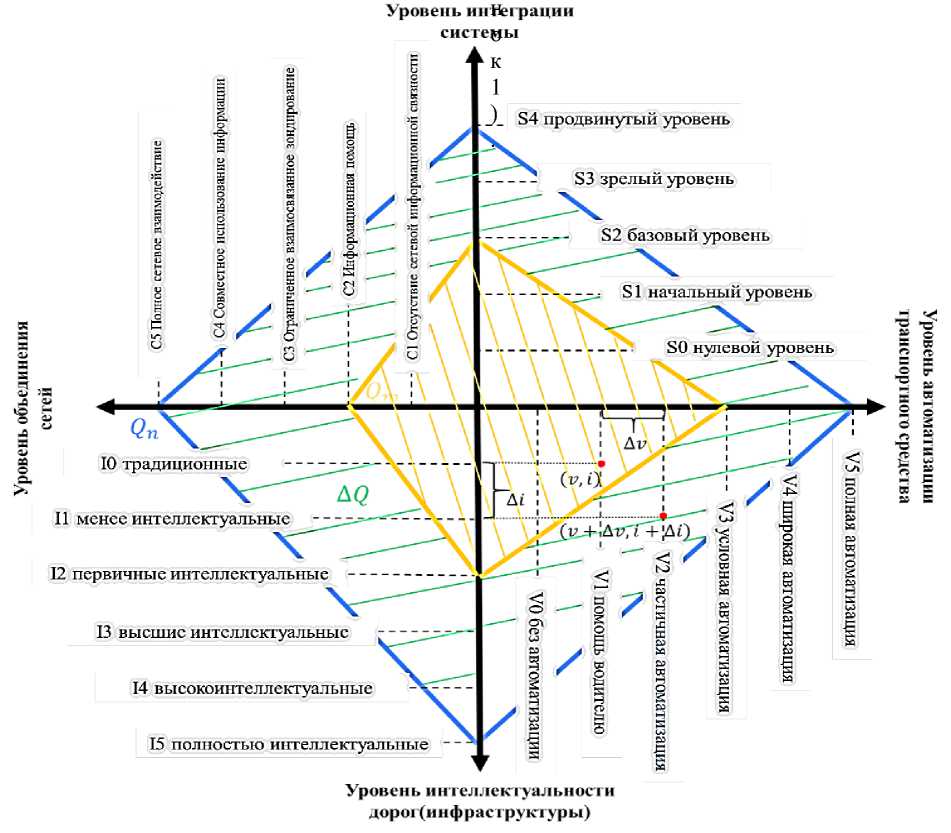
Рисунок 1 – Четырехмерная модель количественной оценки эффективного внедрения беспилотных технологий в организационное управление перевозочного процесса доставки грузов
Благодаря установленному уровню развития интеллекта транспортных средств и инфраструктуры, можно говорить о неравномерности достигнутых уровней и недостаточной степени взаимодействия с инфраструктурой. При рассмотрении влияния на уровень зрелости БТ существуют только двух аспектов – уровня интеллекта транспортного средства и уровня интеллекта инфраструктуры – уровень зрелости БТ может быть представлен бинарной функцией G = F(v, г), где в качестве зависимых переменных выступают уровень интеллекта транспортного средства и уровень интеллекта инфраструктуры [1].
Важнейшим вопросом при оценке эффективности функционирования любой транспортной системы является выбор и обоснование показателя, характеризующего внутренние процессы ее функционирования, а также учитывающего вклад в эффективность систем более высокого уровня.
Показатель эффективности внедрения интеллектуальных технологий в организационное управление перевозочного процесса доставки грузов должен соответствовать цели построения интеллектуальной транспортной системы, учитывать вклад интеллектуальных технологий в эффективность перевозочного процесса (высокоавтоматизированных) транспортных средств, быть чувствительным к изменению исходных данных и иметь ясный физический смысл. Целью процесса внедрения интеллектуальных технологий в организационное управление перевозочного процесса при построении локальной ИТС является обеспечение максимальной эффективности доставки грузов транспортными средствами [2]. В качестве показателя эффективности внедрения интеллектуальных технологий в организационное управление перевозочного процесса доставки грузов, установлена и принята величина среднего относительного уровня интеллекта в ходе их функционирования за заданный период времени [3].
Приняв за основу систему индикаторов оценки внедрения БТ, проанализировав взаимосвязи между индикаторами и одновременно рассмотрев конкретные факторы, влияющие на показатели, и взаимосвязи между этими факторами, на основе этого построено дерево технико-экономической оценки внедрения БТ (Рисунок 2).
Одним из способов реализации критериального подхода в области планирования работы БТ может быть построение маршрута движения с применением алгоритма Эдсгера Дейкстры. Суть данного алгоритма в том, что он позволяет найти оптимальный путь, который соответствует самому короткому расстоянию движения или же маршруту с наименьшими переменными расходами [4].
Алгоритм Дейкстры по очереди выбирает все вершины графа и дает им метки, вследствие чего его также называют алгоритмом меток. Им присваивается значение, равное минимальным расстояниям (стоимостям) между вершиной источника и определенной вершиной [5]. Таким образом алгоритм определяет минимальную дистан-цию/стоимость между вершинами, которыми являются пункты отправления (s) и назначения (t). Важно уточнить, что данный алгоритм работает только с графами, имеющими веса от 0 и выше. Получаем, на рассматриваемой дорожной сети (Sw=(X,V,W/), где X - множество вершин, а V -множество дуг, все значения стоимости или расстояний имеют не отрицательное значение (wy > 0)
Основные этапы алгоритма Дейкстры:
-
- I этап - определение значения кратчайшего пути/минимальной стоимости;
-
- II этап - построение оптимального пути от вершины s к вершине t.
Метки, назначенные вершинам сети x i по данному алгоритму и обозначающиеся d(x i ) , требуются для определения оптимального пути между вершинами s и x i . Метки могут носить временный или постоянный характер. При получении вершиной X i на одном из шагов метки d(x i ), путь между из s к x i в ориентированном графе S w имеет стоимость d(x) При выполнении условия, в котором d(x i )* является постоянной меткой, через u ( равное x i ) обозначается вершина, имеющая постоянный характер и соответствующая данной метке. В случае, когда переменная метка превращается в постоянную, это значит, что найдена минимальная стоимость проезда между вершиной s и обозначаемой меткой вершины. Детальней алгоритм представлен ниже.
Первый этап начинается с инициализации меток. Принимаем следующие значения меток: метку вершины отправления приравниваем нулю, а остальных вершин - бесконечностям (либо очень большим числам). Все пункты обозначаем как не посещённые.
d ( 5 )* = 0, u = s , d ( xt ) = да для остальных x # s .
Для каждой вершины x i , кроме u, вычисляем сумму метки u и затрат проезда до вершины x i , и пересчитываем значения по принципу:
-
d новая ( x i ) = min { d старая ( Xi ), d ( u ) + w ( u , X ) } (1)
Среди меток временного характера выбираем ту, которая будет изменена в постоянную соблюдая следующее условие:
d ( x )* = min { d ( x, ) | x, е X , d ( x, ) - вр еменная } . (2)

Рисунок 2 – Дерево технико-экономической оценки внедрения беспилотных технологий в управление движением беспилотных транспортных средств
Вершина, соответствующая постоянной метке d ( Xi )*, преобразована в постоянную u=X i, и далее не используется алгоритмом.
Проверка заключается в равенстве u=t . Если равенство выполняется, происходит переход на следующий этап.
Второй этап «Построение оптимального маршрута» состоит из поиска дуг. При выборе вершины X i из всех, которые предшествуют вершине u=t, необходимо выполнение следующего правила:
d ( u ) = d ( xt )* + w(x , u ). (3)
Дуга ( X i , u ) включается в путь с минимальным значением, а u наделяется значением x i . При выполнении правила (3) одновременно несколькими вершинами, разрешается рассмотрение любой из них в качестве текущей.
Факт, что выбранный путь является наиболее эффективным по стоимости транспортировки
|
Г i |
32426,59 |
i |
31877, 32 |
|
|
i |
i |
8268, 27 |
i |
|
|
i |
i |
i |
8268, 27 |
|
|
i |
i |
i |
i |
|
|
wv = |
||||
|
i |
i |
i |
i |
|
|
i |
i |
i |
i |
|
|
i |
i |
i |
i |
|
|
I i |
i |
i |
i |
|
|
Итоги работы, базирующейся на алгоритме |
||||
Дейкстры программы в Matlab представлены на рисунке 2. С использованием указанной программы возможно построение назначенной дорожной сети, где на рисунке 3 указаны оптималь-
(в обратном порядке), подтверждается выполнением равенства u=s , в противном случае, необходимо вернуться к началу второго этапа.
Поиск маршрута с минимальной дистанцией и/или стоимостью производится с помощью задаваемых двух весомых матриц, в которых весами служат дистанция между вершинами (матрица 4) и расходы при транспортировке (матрица 5).
Command Window
РЕШЕНИЕ ЗАДАЧИ О КРАТЧАЙШЕМ ПУТИ
КРАТЧАЙШЕЕ РАССТОЯНИЕ ОТ xL ДО хВ = 73
МАРШРУТ КРАТЧАЙШЕГО ПУТИ: xL -> х4 -> х7 -> хВ
РЕШЕНИЕ ЗАДАЧИ О НУГИ С НАИМЕНЬШЕЙ СГОИМОСГЫВ
МИНИМАЛЬНАЯ СТОИМОСТЬ КА МАРШРУТЕ ОТ xl ДО хВ = 5. В BPBPLti-DM
КРАТЧАЙЛИЙ ПУТЬ: xl -> х2 -> хЗ -> х5 -> хб -> хВ
Рисунок 2 – Оптимальные маршруты с указанием конечного минимального значения для дистанции и/или затратам
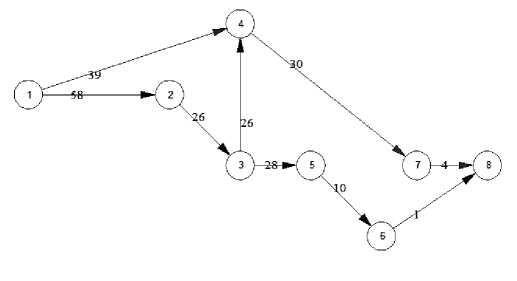
Рисунок 3 – Граф с указанием маршрута, имеющего наименьшую дистанцию на заданной дорожной сети
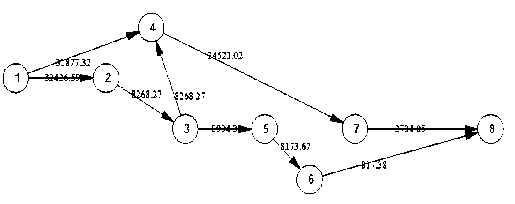
Рисунок 4 – Граф с указанием пути с минимальными затратами на заданной дорожной сети
Выводы
На основе анализа параметров транспортной системы с внедренными в организационное управление перевозочного процесса доставки грузов интеллектуальными технологиями, а также параметров влияния внешней среды, на основе оценки эффективности внедрения интеллектуальных технологий предложена методология построения интегрированной информационной системы перевозочных процессов.
Интеграция информационной системы подразумевает синергию элементов транспортной системы в рамках функционирования единой интеллектуальной транспортной системы с автоматизированным органом управления, имеющим несколько уровней управления и безопасности. Эффективность работы такой системы должна оцениваться на основе следующих факторов: безопасность, показатели транспортной работы, удовлетворенность спроса на транспортные услуги
Функция обратной связи в программе VENSIM PLE позволяет проводить качественный анализ карты причинно-следственных связей, наглядно отражающих взаимодействие между переменными. Цепь обратной связи влияние применения БТ на эффективность процесса транспортировки показывает, что применение БТ в перевозочном процессе позволяет сократить расстояния транспортировки, пройденные за счет интеллектуального планирования маршрутов, увеличить среднюю скорость движения транспортных средств за счет улучшения оперативность управления и сократить время простоев, погрузки и разгрузки за счет интеллектуального диспетчерского управления. Сочетание этих аспектов позволяет увеличить эффективное время работы, повысить эффективность работы транспорта и эффективность транспортного процесса.
На основании качественных связей, выявленных на карте причинно-следственных связей, можно сделать следующие выводы: внедрение интеллектуальных систем и беспилотных устройств на автомобильных дорогах оказывает влияние на технико-эксплуатационные показатели транспортных средств. Увеличение технико-эксплуатационных показателей ТС повысит эффективность работы автотранспорта за счет обеспечения оперативности выполнения функций системы управления.
Благодаря их использованию, повышается контроль движения БТС и эффективность перевозочного процесса, что обеспечивает взаимодействие участников перевозки и системы управления движением транспортных средств с помощью беспилотных технологий и средств телематики. Это влияет на качество следующих факторов: повышается организованность транспортных потоков и пропускная способность, снижается время простоя и затраты на топливо, увеличивается средняя скорость транспортных средств, снижаются издержки и потери при реализации транспортного обеспечения.
Список литературы Методология оценки эффективности внедрения интеллектуальных технологий в организационное управление перевозочного процесса доставки грузов
- Сафиуллин Р.Н., Пыркин О.П., Карпов С.Н., Демченко В.А. Системы автоматического управления технологическими процессами доставки грузов в транспортно-логистических структурах материально-технического обеспечения: монография. ВАМТО. - СПб: "Свое издательство", 2021. - 304 с. EDN: YQLGOB
- Сафиуллин, Р. Н. Результаты исследований по внедрению интеллектуальных технологий ICV в транспортную систему городской агломераций / Р. Н. Сафиуллин, Т. Хаотянь, Р. Р. Сафиуллин // Технико-технологические проблемы сервиса. - 2023. - № 2(64). - С. 78-86. EDN: XWBVGJ
- Сафиуллин Р.Н., Афанасьев А.С., Резниченко В.В. Концепция развития систем мониторинга и управления интеллектуальных технических комплексов // Записки Горного института. 2019. Т. 237. С. 322-330. DOI: 10.31897/PMI.2019.3.322 EDN: QSSESC
- Belikova, D. D. The Design and Evaluation of a Telematic Automated System of Weight Control for Heavy Vehicles / D. D. Belikova, R. N. Safiullin // Infrastructures. - 2022. - Vol. 7, No. 7. DOI: 10.3390/infrastructures7070086 EDN: YOMPBV
- Сафиуллин, Р. Н. Алгоритм оценки эффективности функционирования бортовых информационно-управляющих систем транспортных средств с учетом влияния их на процесс доставки грузов / Р. Н. Сафиуллин, В. А. Ефремова, К. В. Сорокин // Транспорт России: проблемы и перспективы: Материалы Международной научно-практической конференции, Санкт-Петербург, 09-10 ноября 2022 года / ФГБУН Институт проблем транспорта им. Н.С. Соломенко Российской академии наук, Коллектив авторов. Том 2. - Санкт-Петербург: Институт проблем транспорта им. Н.С. Соломенко РАН, 2022. - С. 78-81. EDN: YBGDGO
- Сафиуллин, Р. Н. Актуальные вопросы правового регулирования при внедрении цифровых технологий в интеллектуальные транспортные системы / Р. Н. Сафиуллин, Р. Р. Сафиуллин, О. П. Пыркин // Цифровые технологии и право: Сборник научных трудов I Международной научно-практической конференции. В 6-ти томах, Казань, 23 сентября 2022 года / Под редакцией И.Р. Бегишева [и др.]. Том 3. - Казань: Издательство "Познание", 2022. - С. 28-35. EDN: OEHKMT
