Методология построения нелинейной системы управления на основе оптимизации траекторного контура воздушного судна

Автор: Диль Виктор Фридрихович, Сизых Виктор Николаевич, Данеев Алексей Васильевич, Тармаев Анатолий Анатольевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 6-1 т.19, 2017 года.
Бесплатный доступ
В статье рассматривается методология синтеза нелинейных систем управления воздушным судном (ВС) на траекторном уровне на основе метода обратных задач динамики (ОЗД) и возможности совмещения его с решением прямых задач динамики на пилотажном уровне. Разработана структурная схема контура управления воздушным судном. В сопоставлении с результатами работы [1] показано, что применение концепций обратных задач динамики в сочетании с организацией контуров управления по принципу симметрии (содержание обратной и прямой задачи динамики обратимо относительно синтезируемых управлений по силовым и моментным характеристикам) позволяет научно обосновано решить важную техническую проблему построения нелинейных САУ ВС.
Система автоматического управления, обратная и прямая задачи динамики, нелинейный синтез, воздушное судно
Короткий адрес: https://sciup.org/148205379
IDR: 148205379 | УДК: 629.735:681.5
Methodology of creation of the nonlinear control system to the basis of optimization of the trajectory contour of the aircraft
The article discusses the procedure for the synthesis of non-linear aircraft control systems at the level of a trajectory based on the method of inverse problems of dynamics (UED) and the possibility of combining it with a solution of direct problems of dynamics on a flight level. A block diagram of an aircraft control loop. In comparison to results of work [1] it is shown that application of concepts of the return problems of dynamics in combination with the organization of control contours for the principle of symmetry (the maintenance of the return and direct problem of dynamics is reversible rather synthesizable managements according to power and moment characteristics) allows to solve evidence-based an important technical problem of creation of nonlinear aircraft SAU.
Текст научной статьи Методология построения нелинейной системы управления на основе оптимизации траекторного контура воздушного судна
Управление воздушным судном (ВС) в пространстве условно разделено на два взаимосвязанных уровня - пилотажный и траекторный. Задачей пилотажного уровня является выдерживание углового положения ВС путем изменения моментов управления, задачей траекторного уровня является управление положением центра масс ВС через изменение действующих на ВС сил. Разделение на траекторный и пилотажный контуры основано на различии решаемых задач в этих контурах управления. Однако в процессе реального полета эти задачи взаимосвязаны. Следовательно, управление на пилотажном уровне влечет за собой управление и на траекторном уровне, и наоборот. Ранее, в статье [1] рассматривался вопрос синтеза управления на пилотажном уровне методом ОЗД с последующим решением задач траекторного уровня на основе метода прямого решения задач динамики по результатам пилотажных параметров. Рассмотрим вариант синтеза управления на траекторном уровне методом обратных задач динамики (ОЗД) с последующим решением прямых задач на пилотажном уровне.
-
1. РЕШЕНИЕ ОБРАТНОЙ ЗАДАЧИ ДИНАМИКИ ДЛЯ ТРАЕКТОРНОГО КОНТУРА
Траекторное движение ВС определяется значениями линейных ускорений центра масс ВС в траекторной системе координат. Ускорения ВС линейно связанны с перегрузками, измерение которых не вызывает затруднений. Изменение скорости движения центра масс ВС относительно Земли VK определяется выражением [2,3]:
V K =^ V K + gn - g £ 2 , (1.1).
где V K - вектор земной скорости ВС, Q — кососимметрическая матрица угловых скоростей специального вида, n - вектор перегрузок, £ 2 – второй столбец матрицы направляющих косинусов скоростной СК относительно нормальной СК. Выполнив обозначение входного воздействия через разность текущей перегрузки и составляющей силы веса, получим выражение векторного уравнения ускорений ВС: *
V k =Q V k + gn , (1.2)
*
где n = n — £ 2 . В скалярном виде выражение (1.2) имеет вид:
|
• V kx |
0 |
to z |
—to y |
" V x " |
* nx |
|||
|
■ V ky |
= |
- to z |
0 |
to x |
V y |
+ g |
n y |
. (1.3) |
|
■ V kz i |
_ to y |
—® x |
0 . |
Vkz _ |
. n z . |
Рассмотрим состояние объекта на интервале времени A t е T, T = [ t 0, t k ] , в течение которого to s = const, s = x, y, z , t0 = 0, t k - нефиксированный момент времени.
В начальный момент времени t = 10 = 0 состояния объекта (1.1) характеризуются зна- чениями линейных скоростей VkS (0) = VkS0 и требуется найти такие управляющие воздействия Si (i=э, н, в,), при которых (1.1) переходит из состояния VkS (0) в новое состояние VS и находится в этом состоянии бесконечно долго. В общем случае изменение составляющих скорости по времени VkS = V^S (t), определяют требуемый профиль полёта (пространственную траекторию движения ВС). Оптимальное управление ВС предполагает, чтобы линейные скорости управляемого движения по каждой степени свободы с требуемой точностью следовали за скоростями, определяемыми эталонной моделью
V* + 7 V* + у Г* - / К0
V kS + Z s VkS + X S 0 V kS A S0VkS , (1.4)
С 1 a = c^a, M ) + it 2 a + c f e (a f + c f (a f ;
c 2 a = c 20 (a, M ) + c f (a fe + c 2 (a )p +
+ c f (a f + c f"* (a )Зтщ + c f (a )3np ; , (1.8)
c з „ = c f ( a , PX +
+ c P ( a , P ) P + c f ( a )53
Законы управления перегрузок n^V k ) по каждой степени свободы получаем, используя метод простого градиента
dn S (VK ) dt
з v Z rSj j=1
S G ( n *)
S n j
, rSj = const . (1.9)
где X S 1 , X S 0 - коэффициенты эталонной модели, V kS ( t) ^ V kS при t ^ ”
Численные значения коэффициентов эталонной модели получают идентификацией аэродинамических объектов методом синхронного детектирования [7] на основе пробных воздействий рулей на модель ВС.
Степень приближения управляемого процесса к эталонному движению VS (t) ^ VkS определяется квадратичным функционалом i з
G ( n ') = т E V » - V kS ( t , n -(O2 , (1.5)
2 1
Согласно (1.9) равны
(1.3), (1.5) компоненты градиента
S G ( nj)
S n *j
• * •
= g (V kj - V j) .
(1.10)
который характеризует энергию ускорения поступательного движения в окрестности фазовых траекторий эталонных моделей [6].
При выборе в качестве управляющих функций не отклонения рулей Si ВС, а управляющие силы FS и эквивалентные им перегрузки n*(n = F) , задача синтеза системы управле-G ния может быть решена поэтапно.
На первом этапе синтезируются управляющие воздействия по перегрузке nS(Vk ) , на втором этапе на основе силовых характеристик ВС [6 -8], определяются законы управления рулями S i , i = в , Э , И :
Подставив (1.10) в (1.9) и проинтегрировав полученное выражение, получим значения потребных значений перегрузки по осям траекторной СК:
з nS (Vk ) = Z rSj (VkS - VkS ) , (1.11)
j = 1
где rS j = grS j , требуемые значения V kS вычисляются из эталонной модели (1.4).
Структура матрицы R=||rsj|| определяется характером перекрёстных связей по управляющим воздействиям в (1.8) и имеет вид)
r11
R = r 21
r12
r32
c f ( a ) c f ( a )
c f ( a ) 0
0 c f Э ( a )
0 c f И ( a , P )
(1.12)
Управляющие воздействия 5 i определяются из уравнений (1.6), (1.7) и (1.8). С одной стороны, из уравнений (1.7) вычисляем коэффици-
енты аэродинамических сил
P *.
---+ П 1 + * ^ 21
n x
n
n z
P n —
4 G
n
* n x
*
n
* n z
qS
G св
^ 22
23 _
C1 a
Ci
2 a
_ c3 a _
,
,
(1.6)
(1.7)
где
mg ( d c ) - 1
ce 7
qS
Dc ce
c 1 a
nj + ^ 22
n j + 8 23
c 2 a , (1.13)
Ci
3 a J
cos a cos P - sin a cos P sin P sin a cos a 0
- cos a sin P sin a sin P cos P

, P = arcsin

ра скорости, вычисленные в нормальной СК, cosф cos9 sin/ sin ф - cos / cosфsin9 cos/sinф+sin/ cosфsin9
sin 9 cos / cos 9 -sin / cos 9
-sin ф cos 9 sin / cos ф +cos / sin ф sin 9 cos / cos ф - sin / sin ф sin 9
m 3 - m 30 ( а ) + m ^ ( а ) а + m ^ 3 ( а ) ™ 3 +
+ m § ( а ) § в + m f ( а ) ф , го ,
Ьа ® 3 .
V ’
а - - arctg( Vp), Р - arcsin( Vp),
V - 7 V '2 + V 22 + V 2
Вращательное движение ВС описывается динамическими уравнениями Эйлера
е - D C =
направляющие косинусы скоростной СК относительно нормальной СК.
В уравнениях (1.8), неизвестными являются отклонения рулей 5 i , которые определяются через вычисленные (1.13) значения коэффициен-
m 1 ( to ) + M 1 m 2( to ) + M 2 m 3 ( to ) + M 3
(2.2)
тов аэродинамических сил:
§ 8 -
с 2 „ - с ю( а , М ) - с ф ( аф - с ' ( а ) § - ср * ( а ) § „* - ср ( а§ „ с ? ( а )
5 , -
с , е - с 10 ( а , М ) - Ас 2 е - с ? ( а)5в
с ? ( а )
(1.14)
8 » -
с 3 а - с р ( а , Р ) Р - с § ( а ) § с ? ( а , Р )
где m'(rn) - 0, m2(®) - -c2to2 -Kдвю3, m3(™) --c3™3 + Kдвю2 , ms(в) - моменты, характеризующие изменение кинетической энергии вращающихся частей АД и влияние диссипативных сил (s=1..3).
Прямая задача динамики формулируется следующим образом.
Известна математическая модель вращательного движения ВС (2.2) и её состояние в начальный момент времени
tos (0) = tos 0, d)S (0) = to)S 0,5 = 1.3.
Синтезированные ЗУ (1.14) формируются как функции, зависящие от перегрузок, то есть 5 в - 5 в ( n y Х ^ э - § 3 ( n x , n y Х § „ - 5 н ( n y , n z )
или, другими словами, как зависимости от управляющих сил F i ( г = x , y , z ) .
2. РЕШЕНИЕ ПРЯМОЙ ЗАДАЧИ ДИНАМИКИ ДЛЯ ПИЛОТАЖНОГО КОНТУРА
(2.3)
Заданы управляющие моменты М s как функции от го s . Требуется найти угловые скорости ™ s - ™ 5 ( t ), t е [ 1 0 , t k ]•
Решение сформулированной задачи сводится к интегрированию замкнутой регулятором (2.1) системы (2.2) с начальными условиями (2.3).
На основе полученного решения в s= в s(t)
аналитически или численно интегрируются
Прямая задача динамики предполагает на основе синтезированных законов управления (1.14) определить управляющие аэродинамические моменты M i (i=1,2,3 ^ x,y,z),как функции от угловых скоростей:
M i = qSlm1, M 2 = qSlm 2 , M 3 = qSb a m 3
M , - M 1 ( o l , ro2\ M 2 - (2.1)
- M2( rovto 2),M 3 - M3( to3)
уравнения Пуассона
Е '1
Е 12 . Е 13
Е 21
Е 22
Е 23
S 31 ■
S 32
Е зз
- ™ з
™ 2
™ 3
- 601
- 6 ^ 2
Е 11
Ю 1
Е 12 . Е 13
Е 21
Е 22
Е 23
(2.4)
с начальными условиями б ij (0 ), определяемых балансировочными значениями углов Эйлера: 9 (0) - 9ГП , / (0), ^ (0)^
Для определения текущих углов Эйлера достаточно использовать 3 элемента матрицы на-
где m, - m™ (а)™ + m2 (а)o2 + mp(а)Р +
+ m?(а)§, + m?(а§, ™ - l™2;
m 2 - m ^ 1 ( а ) Ю ' + m ^2 ( а ) ™ 2 + m p ( а ) Р + + m 2 ( а ) § к + m § ( а ) § 3 , ™ 2 - ^™™;^
правляющих косинусов:
( ^ 1 ( ^ i
<9 = arcsin s 1 , у = arccos l — 2— 1 ; ^ = arccos l — 1— I .(2.5) I cos 9 ) I cos 9 )
Характерным свойством плоско-симметричного ВС является зеркальность геометрических преобразований и преобразований энергии движения.
С учётом сказанного на основе формул, приведенных выше, а также математических
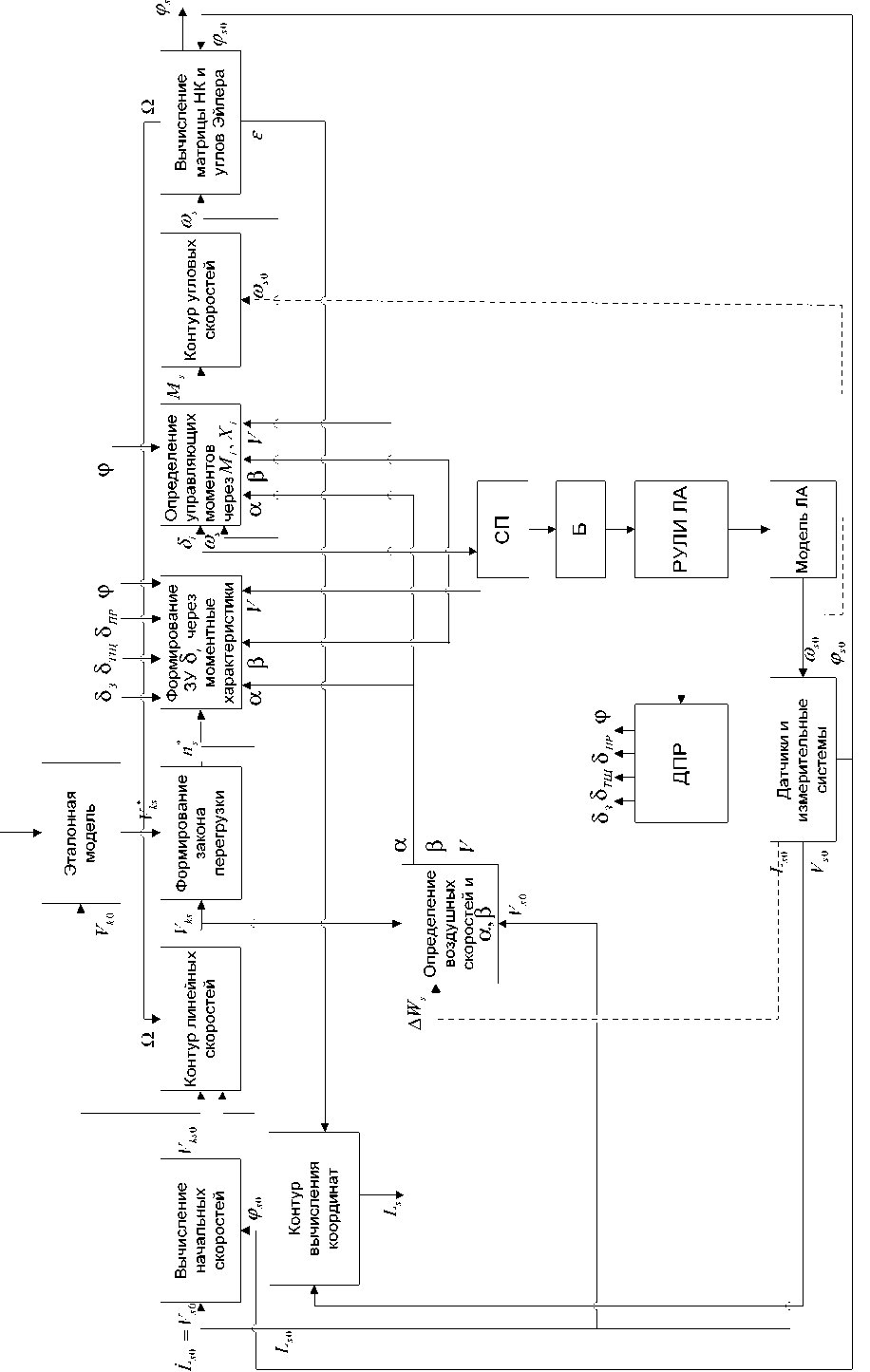
Рис. 1. Функциональная схема траекторного контура управления ВС, построенного через оптимизацию линейных скоростей методом ОЗД зависимостей, определяющих оптимизацию траекторного контура, может быть построена функциональная схема, определяющая архитектурный облик перспективной нелинейной САУ самолётов (рис. 1).
В сравнении с контуром управления через оптимизацию вращательного движения методом ОЗД, приведенного в [1], данный контур построен по методу ОЗД через оптимизацию линейных скоростей. Очевидно, что при их построении нужно учитывать специфику решаемых задач пилотирования. В таких режимах полёта как выполнение различных виражей, а также в режимах стабилизации горизонтального полёта, приведения к горизонту и др. целесообразно оптимизировать контур угловых скоростей. В режимах траекторного управления (полёт по маршруту, маловысотный полет летательного аппарата (ЛА), управление скоростью наноспутников и др.) необходимо использовать оптимизацию контура линейных скоростей.
Таким образом, применение концепций обратных задач динамики в сочетании с организацией контуров управления по принципу симметрии (содержание обратной и прямой задачи динамики обратимо относительно синтезируемых управлений по силовым и моментным ха-
рактеристикам) позволяет научно обосновано решить важную техническую проблему построения нелинейных САУ ВС.
Список литературы Методология построения нелинейной системы управления на основе оптимизации траекторного контура воздушного судна
- Диль В.Ф., Сизых В.Н., Данеев А.В. Оптимизация процессов управления пространственным движением воздушного судна на основе уравнений нелинейной динамики//Известия Самарского научного центра РАН. Т. 19. № 1, 2017. С. 195-200.
- Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование. М.: Наука, 1973. 240 с.
- Бюшгенс Г.С., Студнев Р.В. Динамика продольного и бокового движения. М: Машиностроение, 1979. 350 c.
- Ефремов А.В., Захарченко В.Ф., Овчаренко В.Н. и др. Динамика полета М.: Машиностроение, 2011. 776 с.
- Крутько П.Д. Обратные задачи динамики в теории автоматического управления. М.: Машиностроение, 2004. 576 с.
- Красовский А.А. Динамика непрерывных самонастраивающихся систем. М: Физматгиз, 1963. 467 с.
- Буков В.Н., Сизых В.Н. Метод и алгоритмы решения сингулярно-вырожденных задач аналитического конструирования регуляторов//Изв. АН. Теория и системы управления. 2001. №5. С.43-61.
