Методы и алгоритмы микропрограммного управления быстродействующими импульсными стабилизаторами напряжения для организации питания бортовой аппаратуры перспективных космических аппаратов

Автор: Вейсов Е.А., Непомнящий О.В., Краснобаев Ю.В., Капулин Д.В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 4 (30), 2010 года.
Бесплатный доступ
Рассмотрено состояние проблем в области цифрового, программного управления энергопреобразущей аппаратурой. Изложены преимущества перехода на программное, микропроцессорное управление источниками питания для перспективных космических аппаратов. В разрезе решения задач автоматического управления энергопреобразующей аппаратурой предложено решение проблемы минимизации конечной длительности переходных процессов при ступенчатом изменении тока нагрузки, методом программного управления. Представлены разработанные алгоритмы функционирования микропроцессорного модуля для данной реализации. Рассмотрена структура SPISE-модели модуля управления импульсным стабилизатором напряжения (ИСН). На основании исследования реализуемой модели процессов показана работоспособность импульсного стабилизатора напряжения с разрабатываемым микропроцессорным устройством управления.
ID: 148176301 Короткий адрес: https://sciup.org/148176301
Текст ред. заметки Методы и алгоритмы микропрограммного управления быстродействующими импульсными стабилизаторами напряжения для организации питания бортовой аппаратуры перспективных космических аппаратов
За последние два десятилетия мощность систем электропитания космических аппаратов изменилась с 1…2 до 15…25 кВт [1]. Развитие спутниковых систем предполагает дальнейший рост и их энерговооруженности, и сроков активного существования, что в значительной мере может быть обеспечено за счет совершенствования систем электропитания. Улучшение характеристик систем электропитания можно достигнуть повышением удельных энергетических характеристик основных элементов, увеличением КПД конверторов, входящих в состав энергопреобразующей аппаратуры, применением новых топологий и законов управления конверторами, которые позволяют наиболее полно использовать энергию солнечных и аккумуляторных батарей. Кроме того, на современном этапе законы управления конверторами должны обеспечивать возможность изменения топологии систем электропитания без доработки самих конверторов и обеспечивать работоспособность первых при изменениях ха- рактеристик вследствие деградации при эксплуатации и частичных отказах.
Достичь значимых результатов в рамках постоянно повышающихся требований как к реконфигурируемости, так и к живучести аппаратуры возможно только за счет применения современных высокотехнологичных и высокопроизводительных, репрограммируемых систем управления, функционирующих на основе процессорного ядра [2].
Несмотря на то что польза от такой технологии очевидна, реальное внедрение ее на практике остается относительно дорогой и сложной задачей, решение которой стандартными микропроцессорными средствами невозможно. Однако появление новых классов микропроцессорных средств со встроенной способностью цифровой обработки сигналов обеспечит необходимую скорость обработки. При подключении в такие системы специально разработанных периферийных модулей имеется воз- можность получить максимальную эффективность и гибкость в данном классе, а также использовать весь спектр возможностей нового подхода.
Рассмотрим текущее состояние задачи микропроцессорного управления импульсным источником. В системе импульсного питания контур управления, который реализует широтно-импульсное преобразование, как правило, выполняется аналоговым. На сегодняшний день цифровое программное управление применяется для реализации простейших функций включения/выключе-ния, плавного пуска, установления последовательности запуска, мониторинга напряжения, обнаружения неисправностей и их устранения. Вместе с тем некоторые импульсные источники питания используют микроконтроллер для отслеживания работы контура управления путем обеспечения линейного регулирования существующего специального контроллера подачи энергии. Более сложные импортные микроконтроллеры, спроектированные специально для рынка источников питания, оснащаются чипами со смешанными сигналами для уменьшения числа компонентов и более активного участия в управляющем контуре импульсного источника питания [3].
Однако во всех этих случаях сам контур управления остается аналоговой функцией, поскольку микроконтроллеры не обладают достаточной обрабатывающей мощностью, чтобы эффективно управлять контуром с помощью цифровых технологий.
Более того, при использовании источников питания для аппаратуры стратегического назначения, например спутниковых космических систем, встает проблема допуска импортных комплектующих к реализации проекта.
Выделим основные преимущества реализации системы управления на основе высокоскоростного процессорного ядра. Здесь появляется способность достичь таких показателей отклика, каких невозможно добиться, используя аналоговый контур управления. Также, применяя «предварительно загруженный» контурный фильтр и поддерживая нелинейные отклики контура, можно получить более быструю синхронизацию и отклик.
Кроме того, при необходимости могут быть добавлены такие функции, как автоматическая калибровка и коррекция системы в зависимости от температуры, входного напряжения и загрузки, синхронизация процесса трансформации электричества с внешними событиями и возможность «горячей» замены компонентов системы.
Интегрированная способность к обработке, необходимая для получения полностью цифровой системы, позволяет аккумулировать и другие функции микропроцессорного управления, в том числе: мониторинг напряжения и отключение устройства при падении/повышении напряжения, дистанционный сбор данных, плавный пуск, переключение между источниками питания, устранение неисправностей, управление системой охлаждения и обнаружение неполадок, а также возможность последовательной связи - и все это без необходимости установки дополнительного процессора.
Также появляется возможность быстрой программной перенастройки системы, например, при изменении требований к емкостной или индуктивной нагрузке, для требуемого отклика источника питания. При программ- ном подходе к управлению появляется возможность такой настройки программного обеспечения, которая позволит поддерживать различные топологии источников с помощью одной аппаратной платформы, а возможно, и менять топологию системы прямо в процессе эксплуатации, основываясь на изменении входного напряжения, например при снижении напряжения аккумулятора. Немаловажным является возможность «полевой» поддержки систем с помощью обновления встроенного программного обеспечения. Снижение количества компонентов в цифровой системе управления приведет к отсутствию допусков на компоненты в контурном фильтре, а следовательно, и к значительному упрощению проверки после завершения производства, повышению технологичности производства устройств с цифровым управлением, уменьшению массы и габаритных характеристик, что является одним из приоритетных направлений при создании бортовых систем космических аппаратов. Переход на цифровое управление позволит быстро работать с множеством контуров, что ведет к расширению технологических возможностей источников питания. Например, появляется возможность независимого управления и распределения нагрузки между несколькими шинами питания в одном устройстве; компенсации коэффициента мощности; адаптивного, предиктивного управления (управления с предсказанием) частотой широтно-импульсной модуляции (ШИМ), позволяющего уменьшить задержки в контуре управления и задержки в передаче информации; оптимизации переходного режима и др. [4].
Рассмотрим более подробно означенную задачу предиктивного управления частотой широтно-импульсной модуляции (ШИМ). Решение выполняется с целью достижения минимальной конечной длительности переходных процессов при отклонении параметров в силовой цепи от номинальных.
В [1] предложен вариант реализации данной задачи в ИСН понижающего типа с ШИМ на основании закона управления, при котором используются только дискретные значения регулируемой составляющей напряжения на емкости конденсатора выходного фильтра ИСН (рис. 1).
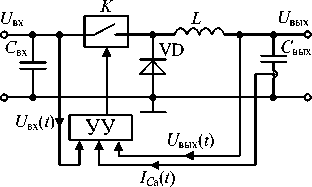
Рис. 1. Импульсный стабилизатор напряжения (упрощенно)
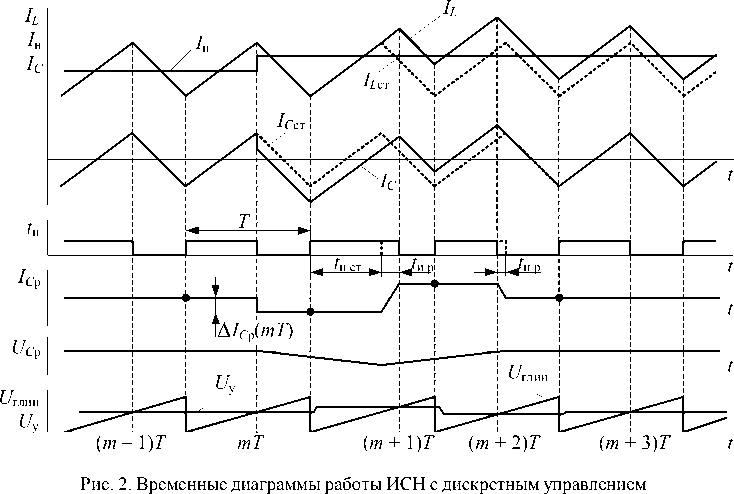
Данный режим работы иллюстрируют временные диаграммы (рис. 2). Здесь I н, I С и I L - соответственно токи нагрузки, конденсатора и дросселя выходного фильтра ИСН: Uc p - регулируемая составляющая напряжения на емкости конденсаторам выходного фильтра. На временных диаграммах токов регулируемые и стационарные составляющие обозначены дополнительными индексами р и ст.
Согласно этому варианту реализации, приращение входного сигнала широтно-импульсного модулятора определяется как
AUу (mT) = --А_[2АUср (mT) -АUр ((m - 1)T)], (1) UвхKм где U вх - напряжение на входе ИСН; Kм = Аtи.у/АUу(mT) = TUm , Аtи.у - приращение длительности импульса управления силовым ключом ИСН относительно моментов времени mT управляемого переключения; AUу (mT) - приращение входного сигнала широтно-импульсного модулятора; Um - амплитуда пилообразного напряжения ШИМ.
Текущие значения динамической составляющей входного сигнала широтно-импульсного модулятора определяются формулой
U у ( mT ) = U у (( m - 1) T ) + А U у ( mT ). (2) Вычислить приращение регулируемой составляющей напряжения А Uc p на емкости конденсатора можно путем интегрирования на интервале времени, равном периоду Т , приращения регулируемой составляющей A I С p тока конденсатора:
mT
А U c р ( mT ) = - J A I C p (( m - 1) T ) dt . (3) С ( m - 1) T
Поскольку приращение регулируемой составляющей тока конденсатора на интервале между регулируемыми моментами времени mT переключения силового ключа ИСН остается неизменным (см. рис. 2), то для его определения достаточно вычислить первую разность тока конденсатора:
А / c p ( mT ) = I c p ( mT ) - Ic р(( m - 1) T )
или
А / c p ( mT ) = I c p ( mT + т ) - I c „ (( m - 1) T + t ), (4) где t - в общем случае произвольно выбранный фиксированный интервал времени.
Для того чтобы располагать временем для проведения вычислительных процедур, необходимых для определения входного сигнала широтно-импульсного моду- лятора к моменту времени mT, целесообразно т выбирать так, чтобы моменты времени (m -1)T + т максимально удалить от моментов времени mT регулируемого переключения силового ключа ИСН. Для ИСН понижающего типа и при модуляции заднего фронта импульса моменты времени (m - 1)T + т следует выбрать непосредственно после момента включения силового ключа ИСН. Поскольку в ИСН понижающего типа статический коэффициент заполнения Kзст > 0,25, то на процедуры выборки дискретных значений входных сигналов и проведение вычислений остается время, близкое к четверти периода преобразования. Использование выражения (4) позволяет определить АТcp ((m - 1)T) в момент времени (m -1)T + т.
Поскольку приращения регулируемой составляющей напряжения на интервале между регулируемыми моментами переключения силового ключа ИСН постоянно, то (3) можно записать в виде
„ Т
А U c p ( mT ) = c A I c p (( m - 1) T ). (5)
Таким образом, замена процедуры интегрирования согласно (3) определением площади прямоугольника согласно (5) позволяет определить приращение регулируемой составляющей напряжения на емкости конденсатора А Uc p( mT ) в окрестности момента времени ( m - 1) T + т , т. е. раньше момента времени mT , в окрестности которого формируется регулируемый фронт импульса управления силовым ключом. Соответственно, и вычисление динамической составляющей входного сигнала широтно-импульсного модулятора в соответствии с (1) и (2) также может быть произведено в окрестности моментов времени ( m - 1) T + т .
Приведем здесь структурную схему устройства управления, реализующего дискретный закон формирования входного сигнала ШИМ (рис. 3).
Аналого-цифровые преобразователи АЦП1-АЦП3 обеспечивают выборку входных сигналов в моменты времени mT + t см, где t см - интервал смещения, и оцифровку выбранных значений сигналов на последующих интерва-
лах времени длительностью в период преобразования Т . Измеритель первой разности ИПР обеспечивает выполнение (4), а вычислители В1, В2 и В3 производят вычисления согласно (5), (1) и (2).
Для обеспечения астатизма выходного напряжения ИСН используется способ с вариантом реализации закона управления по мгновенным значениям координат состояния, согласно которому входной сигнала U у ШИМ формируется как сумма динамического сигнала управления U у.д и сигнала U у.ст, задающего статический уровень выходного напряжения [1]. Сигнал U у.ст вычисляется как интеграл сигнала рассогласования по напряжению, взятый с некоторым коэффициентом K р , причем величина этого коэффициента выбирается достаточно малой, что бы на интервале переходного процесса приращение сигнала U у.ст было много меньше приращений динамического сигнала управления U у.д. Это исключает влияние сигнала U у.ст на динамические характеристики ИСН. В рассматриваемом ИСН с дискретным способом формирования входного сигнала модулятора сигнал U у.ст вычисляется посредством вычислителя В4 согласно выражению m
U ус = K р Е «* kT ), (6)
k = 1
где e( kT ) = U вых ( mT ) - U 0 - дискретные значения сигнала рассогласования по напряжению; U 0 – задающее напряжение.
Примерный вид входного сигнала U у и пилообразного опорного напряжения U глин широтно-импульсного модулятора приведен на рис. 2.
С целью адекватного представления алгоритма формирования управляющего сигнала с точки зрения и логики программного управления, рассмотрим основные состояния вычислительного процесса.
С точки зрения вычислительной логики, началом функционирования микропроцессорной системы в режиме формирования управляющего импульса следует считать активный фронт сигнала готовности. Однако с целью завершения переходных процессов в цифровых и аналоговых модулях системы, а также выхода электронных компонентов источника на рабочий режим вводится программная задержка стартового замера, в процессе которой происходит инициализация начальных значений переменных, настройка подсистем управления и определение системных констант. Здесь и далее интервальные линии реализуются на аппаратно-программном уровне при помощи программируемых, системных таймеров-счетчиков.
Результатом функционирования рассматриваемого программного модуля будет формирование управляю- щего импульса с предварительным расчетом его корректирующих значений - A UСр( j) и A Uу( j). Изначально эти переменные должны быть «сброшены» – приравнены к заданному коэффициенту пересчета.
На первоначальном этапе замера, обозначим его как этап ( j – 1), происходит оцифровка входных сигналов с АЦП (см. рис. 3, 4).
Посредством драйверов АЦП1–АЦП3 происходит снятие и представление в числовом формате данных по току конденсатора I c ( j -1 ) выходного фильтра, входног о напряжения U вх ( j -1 ) и выходного напряжения U вых ( j -1 ). Идентичные АЦП2 и АЦП3 функционируют параллельно и синхронно. Тем не менее возможно некоторое рассогласование завершения этапов преобразования. Здесь интервалы оцифровки могут иметь предельно малую разницу, порядка 10–9 с, что не является принципиальным недостатком во временных интервалах расчета и компенсируется приемом данных микропроцессорным ядром от АЦП в режиме прямого доступа к памяти. АЦП2 и АЦП3 выполняют преобразование в течение малого интервала смещения т < 0,25 T , т е. в течение первой четверти периода.
В разрабатываемой системе драйвера АЦП2 и АЦП3 запускаются по окончании преобразования АЦП1, поэтому имеется возможность использования мультиплексированных каналов АЦП1 для АЦП2 или АЦП3. Таким образом, суммарное время преобразования и предварительной обработки данных по всем каналам не должно превышать четверти периода. Оставшееся время можно успешно использовать для реализации функций управления ИСН, не связанных со стабилизацией.
Полученные на первоначальном этапе значения переменных Ic ( j - 1), U вх( /. ,. и U вых(Н) сохраняются в памяти системы и впоследствии будут использованы для расчета величин приращений. Следует отметить, что рассмотренный этап ( j – 1) не является расчетным и служит только для формирования стартовых значений.
Непосредственным началом функционирования системы следует считать этап j. Замер и численное представление величин тока и напряжений IC(j), Uвх(j) и U происходит так же, как и в предыдущем фрагмен- вых( j ) те алгоритма.
По окончании замеров вычислитель В4 производит расчет значения сигнала рассогласования по напряжению согласно выражению (6): E k ( j ) : = U вых ( j - t ) - U q . С целью организации принципа предварительного просмотра потока данных, происходит сдвиг индексных переменных, при котором значения переменных, полученных на текущем этапе, используются в расчете значений для сле-
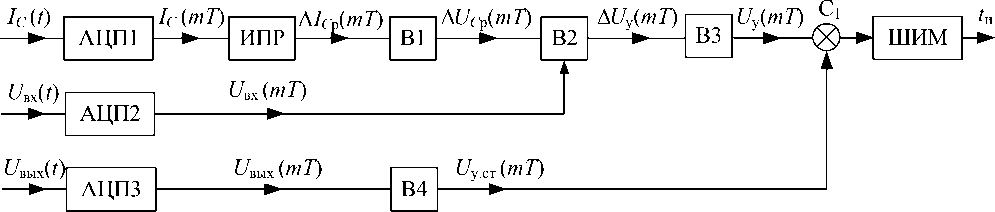
Рис. 3. Структурная схема микропроцессорного устройства управления
дующего. На данном этапе расчетов выполняется нор- мализация сигнала, задающего уровень выходного напряжения. При выходе значения за верхнюю или нижнюю границу сигнала происходит автоматическое приравнивание текущего значения к фиксированной величине соответствующей границы. Таким образом, при превышении уровня верхней границы сигнал приравнивается, «подтягивается» к ней, и аналогично – при пересечении уровня сигнала нижней границы. На данном этапе исключается возможность выхода за допустимые пределы значения сигнала и реализуется принцип нормализации значений за минимальное время.
По окончании нормализации происходит вычисление приращения текущей, регулируемой составляющей тока конденсатора, AIj) := IС(j) - Ic(j-1). Здесь функционирует интегральный преобразователь, реализующий выражение (4). Полученные значения индексных переменных, как и в предыдущем случае, сдвигаются в массиве данных и сохраняются в памяти вычислительной системы.
На следующем этапе расчетов, в потоковом режиме, функционируют вычислители В1 и В2, производящие вычисление приращения текущей регулируемой составляющей напряжения на емко сти конденсатора
T
U С р ( j ) : = C С р ( j )
входного
и вычисление текущего приращения сигнала ШИМ
A U y ( j ) := d 7 K M[2 A UС p ( j )-A Uc p ( j - 1 ) ] согласно выра-
U вх ( j )
жениям (5) и (1). Полученные результаты занимают мес- то предыдущих в памяти системы, т. е. вновь выполняется сдвиг массива значений.
В завершение посредством вычислителя В3, реализующего выражение (2), происходит расчет текущего значения динамической составляющей входного сигнала широтно-импульсного модулятора U y j : = Uy j■ 1 ) + A Ucр(] .) и вычисление длительности управляющего импульса
T t := —U и.у U y( j)
m
Полученные результаты переписывают- ся в память со сдвигом значений и цикл повторяется.
Отметим, что при первоначальном запуске на первом периоде преобразования величина Uу(j) = 0, следовательно, амплитуда управляющего сигнала будет посте- пенно нарастать от периода к периоду, и при достижении установившегося значения система выходит на режим.
С целью подтверждения работоспособности ИСН с дискретным способом формирования входного сигнала модулятора разработана модель ИСН понижающего типа в формате SPISE. Модель устройства управления выполнена в соответствии со структурной схемой (см. рис. 3) с использованием аналоговых устройств, имитирующих цифровую обработку поступающей информации. Модель силовой цепи ИСН понижающего типа имеет следующие параметры: индуктивность дросселя L = 150 мГн, емкость конденсатора выходного фильтра C = 1 000 пФ, период преобразования Т = 25 мкс, входное напряжение Uвх = 115 В и выходное напряжения Uвых = 100 В. Вычислительные процедуры в модели производятся непосредственно после моментов времени mT в соответствии со структурной схемой (см. рис. 3) и выражениями (3), (4), (7), (8) и по длительности занимают 2 мкс.
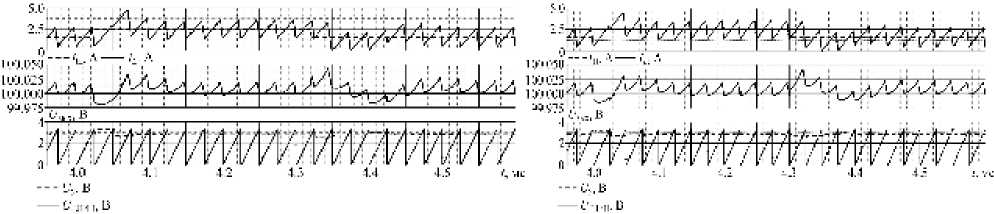
На рис. 4 приведены временные диаграммы токов нагрузки I ни дросселя IL , выходного напряжения U вых , входного и опорного напряжений ШИМ, для случая, когда ступенчатое изменение тока нагрузки приводит к изменению длительности импульса управления, не нарушающему условие (1). Диаграммы на рис. 4, а и рис. 4, б отличаются моментом времени, в который происходит ступенчатое увеличение нагрузки.
Достижение длительности переходного процесса в два-три периода преобразования следует из возврата тока дросселя, выходного напряжения и входного сигнала широтно-импульсного модулятора к стационарным значениям через два-три периода преобразования после момента коммутации тока.
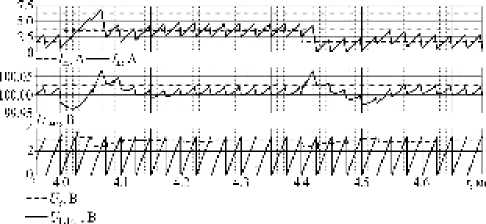
Рис. 5. Временные диаграммы работы ИСН при U вх = 115 В, AI н = 2А
В случае ступенчатого изменения тока нагрузки большего значения, приводящего к нарушению условия (1) (рис. 5), длительность переходного процесса несколько возрастает, но остается конечной. При изменении входного напряжения ИСН и соответствующем изменении параметров вычислителя В2 в соответствии с (3), длитель-
а б
Рис. 4. Временные диаграммы работы ИСН при U вх = 115 В, A I н = 1 А: коммутация нагрузки в начале периода преобразования ( а ); коммутация нагрузки в конце периода преобразования ( б )
ность переходных процессов в ИСН остается минимально возможной.
Т аким образом, исследование процессов в модели ИСН показало работоспособность ИСН с предложенным устройством управления и достижение минимальной конечной длительности переходных процессов в два периода преобразования при ступенчатом изменении тока нагрузки. Показано, что необходимость однократного, в течение периода Т, проведения процедур оцифровывания и проведения вычислительных операций, освобождает существенный временной интервал в работе цифрового вычислительного устройства, который может быть использован для диагностики ИСН, решения задач по распределению тока нагрузки между отдельными ИСН при их параллельной работе на общую нагрузку, что является дополнительным преимуществом предложенного способа управления ИСН, а применение импульсного источника питания, использующего полностью цифровой контур управления, реализуемо- го при помощи высокоскоростных микропроцессорных средств российского производства, имеет значительные преимущества по сравнению с аналоговыми вариантами и обладает неоспоримыми преимуществами стратегического плана.
