Методы и принципы оценки тренажеров открытой хирургии при помощи стендов выходного контроля

Автор: Скользнев Антон Вячеславович, Минаев Антон Андреевич, Ибатуллин Ильдар Дугласович, Иващенко Антон Владимирович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Актуальные проблемы машиностроения
Статья в выпуске: 1-2 т.16, 2014 года.
Бесплатный доступ
Показана методология оценки соответствия хирургических тренажеров для эндоскопической и открытой хирургии требованиям технического задания при помощи стендов выходного контроля. Показан интерфейс взаимодействия АПК с ПЭВМ, приведены результаты испытаний.
Тензодатчик, симулятор, тренажер, выходной контроль, автоматизированная система
Короткий адрес: https://sciup.org/148202781
IDR: 148202781 | УДК: 658.562.3
Methods and principles of the assessment of open surgery simulators by means of output control stands
The methodology of assessment the correspondence of surgery simulators for endoscopic and open surgery to specification requirements by means of output control stands is shown. The interface of interaction between program-apparatus complexes and PC is shown, results of tests are given.
Текст научной статьи Методы и принципы оценки тренажеров открытой хирургии при помощи стендов выходного контроля
Процесс разработки и изготовления аппаратно-программных комплексов (АПК) симуляционной медицины неразрывно связан с соблюдением требований соответствия данных АПК исходному объекту симуляции [1-3]. Объектом симулируемого воздействия может выступать введение инструмента в область разреза, перемещение проводника в сосудистой системе человека, разрез мягких тканей пациента и т.д. Качественные и количественные показатели степени соответствия имитируемого воздействия аппаратными средствами АПК исходному объекту симуляции нуждаются в тщательной проверке и оценке со стороны как квалифицированных специалистов медицинского персонала, так и со стороны разработчиков соответствующих АПК. Данный процесс может быть реализован при помощи автоматизированных стендов следующих видов: приемочного контроля; выходного контроля. Приемочный контроль представляет собой первичную оценку разработанных АПК заявленным требованиям и проводится по разработанной программной методике испытаний для соответствующего объекта испытаний. Выходной контроль представляет собой конечный этап оценки АПК, завершающий собой процесс производственного изготовления АПК.
Рассмотрим оценку характеристик тренажеров для открытой хирургии на примере стендов выходного контроля подробнее. Для выполнения комплексной оценки выходного контроля
Скользнев Антон Вячеславович, аспирант Минаев Антон Андреевич, аспирант
количественных характеристик манипуляторов для эндоскопической и открытой хирургии были разработаны оригинальные стенды с оригинальными тензорезистивными датчиками цилиндрической конструкции. Внешний вид стендов представлен на рис. 1-2.

Рис. 1. Стенд выходного контроля для открытой хирургии
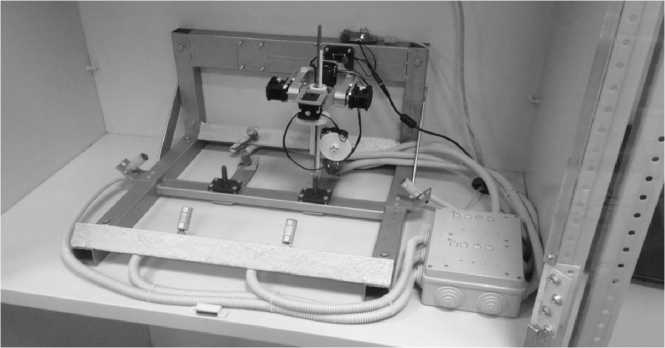
Рис. 2. Стенд выходного контроля для эндоскопической хирургии
Конструктивно каждый из стендов представляет из себя совокупность следующих элементов: манипулятор; преобразователь сигналов с ПЭВМ (RS485 или TTL в зависимости от типа сервоприводов); систему датчиков, закрепленных на стальной раме; аналого-цифровой преобразователь (АЦП); конвектор для управления температурой воздуха во время проведения испытаний.
Управление манипулятором осуществляется посредством подачи цифровых команд на исполнительный механизм манипулятора – сервопривод. Каждый манипулятор оборудован 4 сервоприводами, осуществляющими следующие операции: поворот манипулятора вокруг точки закрепления; движение рейки манипулятора взад-вперед; вращение рейки манипулятора; перемещение манипулятора в вертикальной плоскости. В качестве сервоприводов используются Dynamixel MX-28R компании Robotis. Основные характеристики сервопривода: микроконтроллер: St Cortex-M3 (Stm32F103C8 72 MHz, 32 Bit); датчик положения: Бесконтактный абсолютный энкодер (12 Bit, 360 degree); двигатель: Maxon; алгоритм управления: ПИД; крутящий момент: 2.5 Н/м (при 12 В, 1,4 А); точность позиционирования: 0,088°. Сервоприводы соединяются последовательно в рабочую цепь, которая соединяется через преобразователь сигналов (UART в RS485 или UART в TTL) c ПЭВМ оператора стенда. Схема соединения сервоприводов и ПЭВМ представлена на рис. 3.

Рис. 3. Схема соединения ЭВМ и рабочей цепи сервоприводов
В качестве элементов для сбора данных используются тензодатчики. Тензорезистивные датчики цилиндрической конструкции применяются для оценки следующих видов воздействий: сила бокового давления рейки манипулятора; вращение рейки манипулятора вокруг своей оси; сила нормальной нагрузки рейки манипулятора. Данные, собранные при помощи аналоговых датчиков, оцифровываются в АЦП и отправляются в ЭВМ по каналу передачи данных для дальнейшей обработки. Стенд оборудован 4
тензодатчиками для оценки каждого изменения положения манипулятора в рамках требуемой методики.
Испытания манипуляторов открытой и лапароскопической хирургии заключаются в оценке соответствия силовых нагрузок сервоприводов манипулятора с показаниями тензорезистив-ных датчиков. Испытания проводятся по следующему алгоритму:
-
1. Оператор стенда определяет маршрут прохода датчиков.
-
2. Оператор выбирает заранее сохраненные предельные нагрузки на сервоприводы манипулятора из файла.
-
3. Производится запуск сценария прохода.
-
4. Анализ полученных результатов.
Манипулятор выходит и возвращается и начальную позицию – «дом» автоматически без участия оператора. В качестве результатов выводятся функциональные зависимости силовых нагрузок, полученные с тензодатчиков и вала сервоприводов. По данным зависимостям рассчитывается относительная погрешность измерений, которая не должна превышать5 %. Результат проведения испытаний для датчика боковой нагрузки приведен на рис. 5. Относительная погрешность результатов измерений для данного испытания составляет 3,8%, что является допустимым.
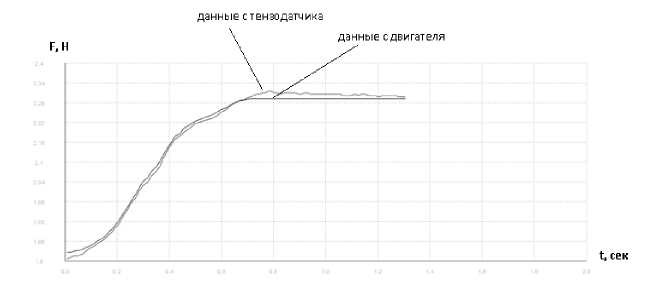
Рис. 5. Результат проведения испытаний для датчика боковой нагрузки
Выводы: В ходе разработки и реализации системы автоматизированного управления [3] испытательным стендом были выявлены следующие ключевые особенности объекта исследований:
-
- коэффициент калибровки в силу конструктивных особенностей стенда зачастую может представлять собой динамическую величину, вследствие чего необходимо производить регулярное калибрования измерительных датчиков;
-
- наличие «всплесков» в измеряемом сигнале с сервоприводов и АЦП свидетельствует о необходимости введения скользящей фильтрации измеряемого сигнала.
-
- в случае, если коэффициент калибровки представляет собой нелинейную величину, необходимо применение аппроксимативных методов для оценки коэффициента калибровки.
Список литературы Методы и принципы оценки тренажеров открытой хирургии при помощи стендов выходного контроля
- Иващенко, А.В. Система управления универсальным диагностическим комплексом для анализа характеристик поверхностей/А.В. Иващенко, А.А. Минаев., А.В. Скользнев и др.//XV межд. научно-практ. конф. «Фундаментальные и прикладные исследования, разработка и применение высоких технологий в промышленности и экономике»: сб. ст. -СПб, 25-26 апреля 2013 г. Том 1. С. 18-20.
- Минаев, А.А. Программное обеспечение универсального диагностического комплекса/А.А. Минаев, А.В. Скользнев, Р.С. Суфиев, И.Д. Ибатуллин.//Перспективные информационные технологии в научных исследованиях, проектировании и обучении (ПИТ 2012): сб. научных трудов -Самара: СНЦ РАН, 2012. С. 37-39.
- Теория автоматического управления. Под ред. Ю.М. Соломенцева. -М.: Высшая школа, 1999. 268 с.
