Методы оценки расстояний и качества радиолиний между роботами в составе роя

Автор: Кубанов Виктор Павлович, Ружников Вадим Александрович
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Электромагнитная совместимость и безопасность оборудования
Статья в выпуске: 3 т.15, 2017 года.
Бесплатный доступ
В статье для координаций действий группы роботов перераспределения между ними ролей, создания альтернативных маршрутов передачи информации в случае удаления или потери связи с одним из узлов предлагается постоянный мониторинг расстояний до соседних узлов относительно каждого из роботов, входящего в рой. Приводятся методы оценки расстояний и качества радиолиний, которые могут быть полезны для создания прогнозных моделей и мониторинга состояния роя роботов, объединенных радиосетью.
Групповая робототехника, радиосвязь, радиосеть
Короткий адрес: https://sciup.org/140256159
IDR: 140256159 | УДК: 621.396.94: | DOI: 10.18469/ikt.2017.15.3.14
Methods of estimation of distances and quality of radiolines between members of multirobot systems
With the development of robotics it became apparent that for a number of tasks (environmental monitoring, patrolling, correction of war systems, etc.), it is simple to use of relatively simple robots. Creating a complex system consisting of many identical devices increases its reliability, since the failure of one of the elements of a distributed network does not affect its survivability. Such systems are flexible and easily scalable, since they have the ability to reconfigure and add new devices. In science, a new scientific trend was formed - group robotics. This direction has specific problems: swarm intelligence, collective behavior of the decentralized self-organizing system, etc. To coordinate the actions of a group of robots redistributing roles between them, creating alternative routes for the transfer of information in the event of the removal or loss of communication with one of the nodes, it is necessary to constantly monitor the distances to neighboring nodes relative to each of the robots entering the swarm. The article provides methods for estimating the distances and quality of radio links, which can be useful for creating predictive models and monitoring the state of a swarm of robots united by a radio network.
Текст научной статьи Методы оценки расстояний и качества радиолиний между роботами в составе роя
Основа для теоретической базы групповой робототехники возникла благодаря биологическим исследованиям за насекомыми, в частности за муравьями, пчелами и другими, в среде которых имеет место роевое поведение [1]. Разработка подходов к координации систем, состоящих из большого числа физически простых роботов, привела к возникновению научных направлений – роевого интеллекта, мультиагент-ных систем [2].
Структура роя предполагает постоянную смену участников и их ролей, что связано с адаптацией роя к окружающей среде, параметры которой заранее не определены [3]. Взаимодействие роботов в группе предполагает поддержание между ее участниками постоянной локальной связи. Для экономии энергетических ресурсов эффективнее обеспечивать связь посредством передачи информации через соседа, который находится в пределах прямой видимости. Таким образом, сеть, состоящую из группы роботов, можно представить в виде ячеистой структуры со случайным расположением узлов.
Теория взаимодействия в групповой робототехнике достаточно хорошо проработана [1]. Предложены многочисленные модели и алгоритмы коллективного управления группами роботов, функционирующих в режиме реального времени, сценарии выбора лидера группы в случае децентрализованного управления и т.д. Однако авторы, как правило, не учитывают особенности работы беспроводных систем передачи данных в инфракрасном или радиочастотном диапазонах.
В статье рассмотрены методы оценки расстояния между узлами робототехнической группы, объединенных в радиосеть, а также метод контроля качества радиолиний. Приводятся достоинства и недостатки каждого из них.
Групповая коммуникация роботов
Робот, входящий в состав роя, имеет небольшой радиус действия вследствие ограниченной мощности передатчика, чувствительности приемника, затухания сигнала. Это ограничивает возможности обмена информации с соседом и может вывести из строя всю сеть в случае значительного удаления всех узлов друг от друга. Применение групповой коммуникации позволяет перемещаться роботам в колонне, относительно опорной точки, режиме патрулирования и т.д.
Группу роботов, имеющих децентрализованное управление при отсутствии базовой станции или опорного узла, можно отнести к радиосетям со случайными мобильными абонентами – MANET (Mobile Ad hoc NETworks) (беспроводные самоорганизующиеся мобильные сети) [4; 15].
Подобные сети обладают рядом преимуществ, к числу которых относятся:
– возможность передачи данных на большие расстояния без увеличения мощности передатчика;
– устойчивость к изменениям в инфраструктуре сети;
– возможность быстрой реконфигурации в условиях неблагоприятной помеховой обстановки;
– простота и высокая скорость развертывания.
В таких сетях возникают дополнительные проблемы, связанные с динамикой топологии сети, вероятностью обрыва связи с соседом из-за его выключения (уничтожения), а также проблемы энергопотребления. Поэтому представляется важным расчет энергетических характеристик, предельных расстояний между соседними робо- тами и своевременная корректировка их положения в пространстве с учетом заданных пороговых значений.
Беспроводные технологии связив робототехнике
Беспроводное управление по радиоканалу – наиболее часто встречающееся решение в робототехнике. Для гарантированной передачи данных между устройствами применяются различные протоколы передачи информации. В случае если совместно работающих устройств достаточно много, их объединяют в беспроводные сети и используют сетевые протоколы передачи данных.
Существует ряд беспроводных технологий, которые могут применяться в робототехнике, однако для коллективных систем необходим компромисс между эффективностью обеспечения связи и энергопотреблением. Широко известная и применяемая технология WiFi (стандарт связи IEEE 802.11) имеет высокое энергопотребление [5] и поддерживает основную топологию «звезда». Технология WiFi Mesh, предлагающая решение для сети с ячеистой топологией, также обладает недостатком высокого энергопотребления.
Применение технологии Bluetooth (стандарт связи 802.15.4) решает вопрос с проблемой повышенного энергопотребления, но ограничивает использование ячеистой топологии, так как предусмотрена поддержка только топологии «звезда».
Компромиссным вариантом авторам видится использование технологии ZigBee (стандарт IEEE 802.15.4 [8]), где используются радиомодули с низким энергопотреблением и поддерживается ячеистая топология. Несмотря на низкую скорость передачи, технологию ZigBee можно успешно применять для передачи информации с помощью АТ-команд и своевременного корректирования действия роботов.
На основе данной технологии можно реализовать сеть с высокой живучестью, что в условиях работы роя роботов в недетерминированной среде может сыграть решающую роль при передаче информации, особенно где велик риск потери (уничтожения) узлов сети. Наличие избыточных связей позволяет менять маршрут прохождения сетевого трафика.
Особенности применения технологииZigBee
ZigBee – стандарт высокоуровневых протоколов беспроводной связи, применяемый массово при автоматизации промышленного оборудова- ния, в системах автоматизации зданий и жилых помещений, в медицинском и телекоммуникационном оборудовании. Отличительные особенности стандарта ZigBee проявляются в его высокой помехозащищенности, гарантированной доставке пакетов и защите передаваемой информации на относительно небольших скоростях передачи данных при крайне низком энергопотреблении, отсутствии необходимости получения частотного разрешения [6-7]. Благодаря стандартизации и открытой спецификации различные производители электронных устройств могут разрабатывать собственные устройства, совместимые с устройствами, использующими протокол ZigBee.
Несмотря на наличие частотных каналов в диапазонах 868 МГц; 915 МГц, большинство производителей микросхем выпускают приемопередатчики для диапазона 2,4 ГГц, где достигается наибольшая скорость передачи данных и наивысшая помехоустойчивость, с применением 16 частотных каналов с шагом 5 МГц, CSMA-CA доступ к каналу. Скорость передачи данных вместе со служебной информацией в эфире составляет 250 кбит/с. При этом средняя пропускная способность узла для полезных данных в зависимости от загруженности сети и количества ретрансляций может лежать в пределах от 5…40 кбит/с [7].
Технология расширения спектра, которая используется в технологии ZigBee, позволяет создавать рой с общим числом роботов в группе до 65000 узлов. Поддерживаются топологии «звезда», многосвязные (mesh) сети и их производные. На канальном и физическом уровнях модели OSI технология ZigBee базируется на стандарте беспроводной связи IEEE 802.15.4 [8]. Данный стандарт изначально был ориентирован на устройства с низким энергопотреблением и невысокой производительностью, что позволяет разрабатывать роботов на базе платформ Arduino или Raspberry PI.
Номинальная дальность радиосвязи, обозначенная в е IEEE 802.15.4, составляет 10 м [6], максимальная ограничена энергетическими характеристиками приемопередающего оборудования. Для совместимости устройств необходимо, чтобы радиомодуль робота имел уровни минимальной выходной мощности передатчика –3 дБмВт и минимальной чувствительности приемника –85 дБмВт для 2,45 ГГц диапазона и –92 дБмВт для субгигагерцевого диапазона.
Решение Государственной Комиссии по радиочастотам [6] устанавливает мощность для ZigBee-устройств, работающих вне помещений, от 10 до 100 мВт. По данным производителя оборудования Digi [9], при таких ограничениях по мощности на базе радимодулей XBee Pro можно построить радиоканал протяженностью до нескольких км, к примеру для целей сбора телеметрической информации в составе автоматизированных систем контроля и учета ресурсов или систем охраны. Модули не требуют конфигурирования и содержат встроенный протокол пакетной передачи данных с проверкой целостности передаваемых данных.
Методы оценки расстояния между роботами
Метод оценки расстояний с применением RSSI . Для оценки радиолинии в сетях ZigBee предусмотрены следующие характеристики: RSSI (received signal strength indicator, индикатор уровня сигнала приема), LQI (link quality indicator, индикатор качества канала связи), TOF (Time of Flight, время, через которое узел принимает отклик о получении пакета). Первый параметр необходим для оценки уровня принимаемой мощности, а второй – для оценки числа принятых пакетов данных, третий позволяет оценить не только эффективность маршрутизации, но и рассчитать расстояние до узла. Данные показатели могут быть использованы для оценки расстояний и состояний каналов между роботами, а также для расчета их координат местоположения относительно друг друга.
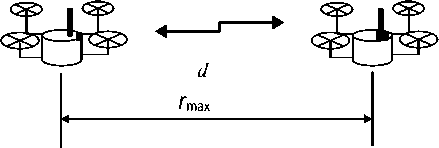
Рис. 1. К расчету расстояния между двумя роботами в условиях прямой видимости
Расчет расстояния между роботами с применением параметром RSSI основан на использовании идеальной модели распространения радиоволн между двумя автономными устройствами (роботами) – см. рис. 1, с учетом потерь в свободном пространстве [15]:
Pr(^o) pr(d)

где Pr (d) – значение мощности принимаемого сигнала на расстоянии d, м от передающего робота, мВт; Pr (d0) – значение мощности принимаемого сигнала мВт, на расстоянии d0 = 1 м от передающего робота. Коэффициент 77 в (1) характеризует потери при распространении сигнала в среде: это безразмерная величина, эмпирические значения которой удобно брать из таблицы 1 [10].
Приведем пример расчета расстояния между роботами при известном уровне принимаемого сигнала RSSI . Исходные данные:
^^ = 10,8 (т^й)>дБмВт;
D 1 nf^-30) n RSSIdQ-RSSI/d\
Р = Юк и 7, мВт; ----2----= ту 1g (—
RS SI = RSSL -10 77 1g (—Y дБмВт. (2) 0\d
Отсюда можно выразить расстояние до робота-соседа:
/RSSIdQ-RSSI\ d = d0-10K 10'/
Таблица 1. Эмпирические значения коэффициента потерь в различных средах
|
Модель распространения |
п |
|
Свободное пространство |
2 |
|
С учетом влияния Земли |
4 |
|
Городская территория |
2,7 ... 3,5 |
|
Внутри здания, прямая видимость |
1,6 ... 1,8 |
Метод контроля RSSI имеет ряд ограничений, поскольку на уровень сигнала влияют следующие факторы [5]:
– быстрые и медленные замирания сигналов на трассе из-за изменения условий распространения радиоволн;
– многолучевое распространение вследствие отражений от различных металлических предметов;
– разброс выходной мощности передатчиков и чувствительности приемников;
– влияние ориентации антенн из-за неравномерности диаграммы направленности.
Как отмечается в [13], практическая применимость этого метода в сетях в ZigBee ограничена дистанциями до 10 м, при этом расстояние измеряется с точностью порядка 3 м.
Метод оценки расстояний с применением TOF основан на получении информации о времени задержки ответного сигнала. Знание фиксированного времени, которое затрачивается на аппаратную обработку, доступное из спецификации оборудования, позволяет оценивать не только время, затраченное на получение отклика от принимающей стороны, но и рассчитывать расстояние между узлами d по формуле d = ct/T., (4)
где c – скорость света, м/с; г – время задержки TOF , с. Для повышения точности используют многократные повторения процедуры измерения. Реально этот метод эффективен в полном диапазоне дальности работы сети (обычно сотни м). Однако на время задержки T существенно влияют:
-
– стабильность частоты задающих генераторов;
-
– задержки фронтов импульсов при приеме и излучении;
-
– отношение «сигнал/шум»;
-
– ошибки из-за многолучевого распространения.
Методы контроля качества радиолинии
Параметр LQI (link quality indicator, индикатор качества канала связи) применяется для оценки работы радиолинии с учетом помех и основан на измерениях параметра PER – коэффициента ошибок на пакет PER . Значение LQI показывает, насколько легко может быть демодулирован сигнал при наличии шума в канале. Диапазон значений данного параметра зависит от разработчика радиомодуля. Для трансивера СС2420 фирмы Texas Instruments значение LQI лежит в диапазоне 50 … 110 [12], причем более высокие значения показывают лучшие характеристики канала.
Приведем некоторые практические примеры оценки качества канала:
-
– слабый уровень сигнала и наличие шума дает низкое значение RSSI и низкое значение LQI ;
-
– слабый сигнал при отсутствии шума в канале дает низкое значение RSSI и высокий LQI ;
-
– сильный сигнал без шума в канале дает высокое значение RSSI и высокий LQI ;
-
– сильный сигнал с шумом в канале дает высокое значение RSSI и низкий LQI ;
-
– сильный шум может давать высокий RSSI и низкий LQI .
Заключение
В статье рассмотрены методы оценки расстояний между узлами роя роботов на основе параметров RSSI , TOF , описан метод контроля качества радиоканала на основе LQI . Преимущество данных методов заключается в том, что они не требуют дополнительных вычислений, поскольку используемые параметры могут быть получены напрямую с приемопередатчика беспроводного узла.
Список литературы Методы оценки расстояний и качества радиолиний между роботами в составе роя
- Каляев И.А., Гайдук А.Р., Капустян С.Г. Модели и алгоритмы коллективного управления в группах роботов. М.: Физматлит, 2009. -280 с.
- Городецкий В.И., Бухвалов О.Л., Скобелев П.О. Современное состояние и перспективы индустриальных применений многоагентных систем.//Управление большими системами. №66, 2017. -С. 94-157.
- Skobelev P.O., Travin V.S., Zhilyaev A.A., Simonova E.V. Application of multi-agent technology in the scheduling system of swarm of earth remote sensing satellites//Procedia Computer Science 12th. Сер. 12th International Symposium Intelligent Systems, INTELS 2016, 2017. -Р. 396-402.
- Моделирование беспроводных много-шаговых самоорганизующихся мобильных сетей//Вестник Кольского НЦ РАН. №1 (24), 2016. -С. 116-126.
- Young-Dong Lee, Do-Un Jeong, Hoon-Jae Lee. Performance analysis of wireless link quality in wireless sensor networks//5th International Conference on Computer Sciences and Convergence Information Technology, Seoul, 2010. -P. 1006-1010.
