Методы расчета частотных характеристик разомкнутых сервоприводов и систем управления

Автор: Белоногов Олег Борисович
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Системный анализ, управление и обработка информации
Статья в выпуске: 2 (29), 2020 года.
Бесплатный доступ
Статья содержит результаты разработки методов расчета частотных характеристик разомкнутых сервоприводов и систем управления, в которых используются частотные характеристики замкнутых сервоприводов и систем управления, получаемых с использованием преобразований Фурье и Лапласа переходных характеристик, вычисляемых по их линейным или линеаризованным математическим моделям. Разработанные методы можно использовать для приближенного расчета частотных характеристик сервоприводов и систем управления по их математическим моделям с незначительными нелинейностями. Выводятся уравнения для расчета частотных характеристик разомкнутых сервоприводов и систем управления для нескольких частных случаев передаточной функции цепи обратной связи. Исследуется работоспособность разработанных методов расчета частотных характеристик разомкнутых сервоприводов и систем управления. Получаемые частотные характеристики разомкнутых сервоприводов и систем управления можно использовать для оценки запасов устойчивости этих объектов по амплитуде и фазе.
Частотные характеристики, разомкнутый сервопривод, системы управления
Короткий адрес: https://sciup.org/143174709
IDR: 143174709 | УДК: 629.78.054.062 | DOI: 10.33950/spacetech-2308-7625-2020-2-108-114
Frequency response analysis methods for open-loop servo drives and control systems
The paper presents results of development of frequency response analysis methods for open-loop servo drives and control systems, which use frequency response data of closed-loop servo drives and control systems obtained using Fourier and Laplace transforms of transient response calculated using their linear or linearized math models. The methods that have been developed can be used for approximate calculation of frequency response of servo drives and control systems based on their math models with slight non-linearities. Equations are derived for calculating frequency response of open-loop servo drives and control systems for several particular cases of feedback loop transfer function. The paper studies the efficiency of the developed frequency response analysis methods for open-loop servo drives and control systems. The obtained frequency response data for open-loop servo drives and control systems can be used for evaluating the amplitude and phase stability margins for these entities.
Текст научной статьи Методы расчета частотных характеристик разомкнутых сервоприводов и систем управления
Для проведения оценки соответствия выбранному критерию устойчивости, а также определения запасов устойчивости по фазе и амплитуде на этапе проектирования сервоприводов, регуляторов и следящих систем управления, к которым, в частности, относятся системы управления вектором тяги ракетных двигателей, требуется вычисление их разомкнутых амплитудно-частотных характеристик (АЧХ) (логарифмических ампли-тудно-частотых характеристик (ЛАЧХ)) и фазовых частотных характеристик (ФЧХ).
Как показано в работе [1], частотные характеристики линейных или линеаризованных моделей приводов, регуляторов и следящих систем, замкнутых отрицательной обратной связью, можно получить из их переходных характеристик, используя принцип взаимно-однозначного соответствия между функциями в области действительных переменных и комплексных переменных, осуществляемых преобразованиями Фурье и Лапласа. Такие алгоритмы и соответствующие им компьютерные программы широко известны [2–4], а один из них был реализован в программе расчета частотных характеристик рулевого привода ракеты-носителя «Энергия» [5] для его линеаризованной модели.
В то же время известно, что достоверные частотные характеристики для существенно нелинейных моделей сервоприводов и систем управления могут быть получены только посредством возбуждения таких объектов моногармоническими входными сигналами на различных фиксированных частотах с последующим анализом реакций на эти возбуждения методом Фурье [6–8].
Если нелинейность объекта несущественна, то приближенные частотные характеристики для таких замкнутых обратной связью сервоприводов и систем управления можно получать из их переходных характеристик. Однако методы расчета частотных характеристик разомкнутых сервоприводов и систем управления остаются неразвитыми. Поэтому целью настоящей работы является разработка методов расчета частотных характеристик разомкнутых сервоприводов и систем управления с использованием частотных характеристик замкнутых сервоприводов и систем управления, получаемых с использованием преобразований Фурье и Лапласа из переходных характеристик, вычисляемых по их линейным или линеаризованным математическим моделям, которые можно использовать для приближенного расчета частотных характеристик сервоприводов и систем управления по их математическим моделям с незначительными нелинейностями.
метод расчета частотных характеристик замкнутой системы
Вначале приведем метод расчета частотных характеристик замкнутой системы. Для переходной характеристики, заданной в конечном интервале времени [0, t max], связь переходной характеристики Х ( t ) с АЧХ и ФЧХ при единичном ступенчатом воздействии и замене кривой переходной характеристики отрезками ломаной линии через равные промежутки времени, и с учетом того, что производная на каждом из них постоянна, дается известными выражениями [1–7]:
Φ( j ω) = С (0) + P (ω) + jQ (ω);
P (ω) = Σ (β (cos(ω t ) – cos(ω t ));
ω i = 1 i i i –1
Q (ω) = Σ n (β (sin(ω t ) – sin(ω t ));
ω i = 1 i i i –1
e i =
A X ( t )
∆ t
= X '( t ) = const;
A (го) = V P (го) 2 + Q (го) 2 ;
y(re) при Q (re) > 0 и P (re) < 0;
-n + y( n , l ) при Q (re) <0 и P (re) < 0;
ф(re) = \ -п+у( n , l ) при Q (re)<0 и P (re)>0;
-2п +у( n , l ) при Q (re) >0 и P (re)>0;
n[-1 - 0,5sign P (re)] при Q (re) = 0;
ф(го) = arctg[ P (го)/Q (го)], где С(0) — постоянная составляющая; P (го) — действительная составляющая первой гармоники частотной характеристики замкнутой системы; Q(го) — мнимая составляющая первой гармоники частотной характеристики замкнутой системы; А (го) — амплитуда; ф(го) — фазовое запаздывание; t — время; го — круговая частота (го = 2пf, где f — частота).
Для расчета ЛАЧХ используется выражение A L (го) = 8,68ln[ A (го)], а для расчета ФЧХ в градусах используется выражение Ф°(го) = 57,295ф(го).
В этом случае передаточная функция замкнутой системы определяется как
" ( s )
Ф ( s ) = 1 + " ( s ) " х( s ) •
Пусть передаточная функция звена цепи обратной связи представляет собой в общем виде апериодическое звено первого порядка
K
" (s) = • ocV 7 тs + 1
Такие цепи обратной связи содержат фильтр высоких частот и применяются для повышения быстродействия сервопривода или системы управления.
Тогда передаточную функцию замкнутой системы можно определить как
Ф( s ) =
" ( s )
1 + V+r " ( s )
После несложных преобразований
Ф( s ) 11 +
K
__oc т s + 1
" ( s )
= " ( s );
K
ф( s )+ т^ " ( s )ф( s )= " ( s );
методы расчета частотных характеристик разомкнутой системы
Алгоритмы размыкания замкнутых сервоприводов и систем управления определяются передаточными функциями звеньев, стоящих в цепях обратной связи.
Пусть система управления представляет собой звено с передаточной функцией W ( s ), замкнутое отрицательной обратной связью, в цепи которого стоит звено с передаточной функцией W ос( s ). Структурная схема такой системы представлена на рис. 1.
" ( s )l 1 -
K W т s + 1 )
= Ф( s ),
получаем передаточную функцию разомкнутой системы
" ( s )
или
ф( s )
K ос ф ( s ) т s + 1
( ) = ф ( s )(т s + 1)
S T s + 1- к эсФ( s ) •
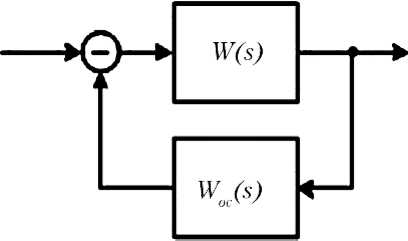
Рис. 1. Структурная схема замкнутой системы управления
Далее, после подстановки в формулу (1) Ф( 5 ) = Ф( ;' го) = P (го) + jQ (го), и учитывая, что 5 = j го, а также то, что W ^( 5 ) = I V(j' го), имеем
[ P (ю) + jQ (ю)](т j ® + 1)
( j ю ) Tj ю + 1 - к ОС P (ю) - к ЭС jQ (ю) • ( )
После преобразований выражения (2)
" ( j го) =
P (го)т j го + P (го) - Q (го)тго + jQ (го) [1 - K ос P (го)] - j [ K ос Q (го) - тго]
№ ( jto) =
[ P ( ю ) т J to + P (to) - Q (to)Tto + jQ (to)][1 - К OC P (to) + jK 3C Q (to) - T j to]
[1 - К ос P (to)]2 + [ К ос Q (to) - Tto]2
окончательно получаем
№ ( jto) =
P (to) - К OC P (to)2 - К OC Q (to)2 + P (to)T2to2
Q (to) - P (to)2Tto - К ос Q (to)2Tto + Q (to)Tto2
[1 - К ос P (to)] 2 + [ К ос Q (to) - Tto]2
[1 - К ос P (to)]2 + [ К ос Q (to) - Tto]2
.
Тогда передаточную функцию разом кнутой системы можно представить как
W(j' го) = U (го) + jV (го),
-
Q (to)
V ( to ) [1 - К ос P (to)]2 + К Oc Q (to)2 •
где U (го)
действительная составляю-
щая первой гармоники частотной характеристики разомкнутой системы; V (го) — мнимая составляющая первой гармоники частотной характеристики разомкнутой системы, определяемые как
U (to) =
P (to) - КP (to)2 - К OC Q (to)2 + P (to)T2to2
[1 - К ос P (to)]2 + [ К ос Q (to) - Tto]2
; (3)
в) K ос = 1 и т = 0.
Это случай т. н. единичной обратной связи. Здесь передаточная функция звена цепи обратной связи принимает вид
W oc ( s ) = 1.
Из выражений (3) и (4) после подстановки K ос = 1 и т = 0 имеем
U (to) =
V (to) =
Q (to) - P (to)2Tto - К ос Q (to)2Tto + Q (to)Tto;
P (to) - P (to) 2 - Q (to) 2 ;
[1 - P (to)] 2 + Q (to)2 ’
[1 - К ос P (to)]2 + [ К ос Q (to) - Tto]2
Теперь рассмотрим некоторые частные случаи.
а) K ос = 1.
В этом случае передаточная функция звена цепи обратной связи принимает вид
№ ( s ) = ——•
°cV 2 T s + 1
Из выражений (3) и (4) после подстановки K oc = 1 имеем
P (to) - P (to) 2 - Q (to) 2 + P (to)T 2 to 2
U (to) =--------------------------------
[1 - P (to)] 2 + [ Q (to) - Tto] 2
;
Q (to) - P (to) 2 Tto - Q (to) 2 Tto + Q (to)T 2 to 2
V(to) =----------------------------------
[1 - P (to)] 2 + [ Q (to) - Tto] 2
.
б) т = 0.
В этом случае передаточная функция звена цепи обратной связи принимает вид
W oc( s ) = K oc.
Из выражений (3) и (4) после подстановки т = 0 имеем
U (to) =
P (to) - К oc P (to)2 - К oc Q (to)2
[1 - К ос P (to)] 2 + КQ( to)2 ’
V (to) =
Q (®)
[1 - P (to)] 2 + Q (to) 2 •
Для
всех рассмотренных
передаточной функции звена
случаев цепи
обратной связи АЧХ разомкнутой системы определяется как
B(^) = ^ U(my + V (to) 2 ,
а ФЧХ — выражениями
д(го) при V (го) >0 и U (ro) < 0;
-
-n + 3( n , I ) при V (го) <0 и U (го) < 0;
0(го) = < -п + 3( n , L ) при V (го) <0 и U (го) > 0;
-
-2п+3( n , L ) при V (го) >0 и U (го) > 0;
п[-1 - 0,5sign U (го)] при V (го) = 0;
0(го) = arctg[ U (го)/ V (го)].
Для расчета ЛАЧХ разомкнутой сис темы используется уравнение
BL (го) = 8,68ln[ B (го)], а для расчета ее ФЧХ в градусах исполь зуется выражение
6°(го) = 57,2959(го).
-
-
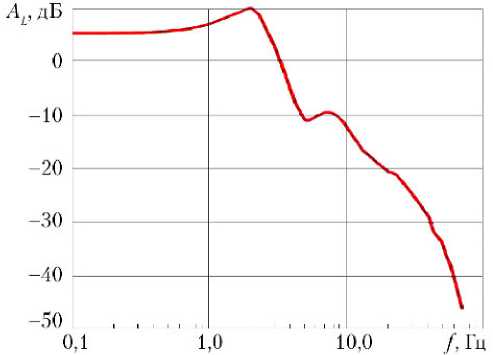
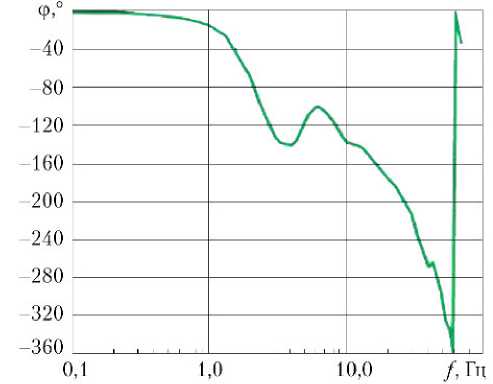
Результаты расчетов ЛАФЧХ рулевого тракта системы управления вектором тяги разгонного блока, выполненного по его переходной характеристике, приведенной на рис. 2, в соответствии с разработанным методом, представлены на рис. 3 и 4.
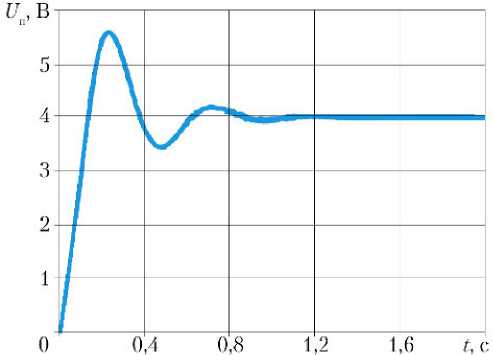
Рис. 2. Переходная характеристика замкнутого рулевого тракта
a)
a)
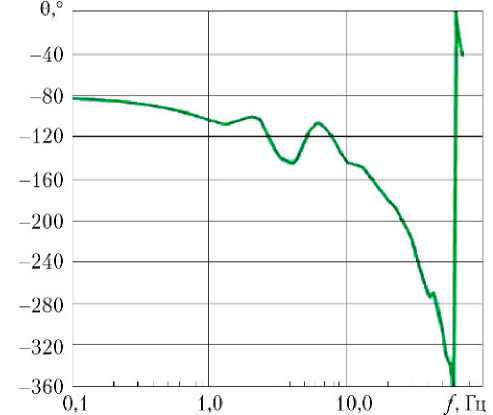
б)
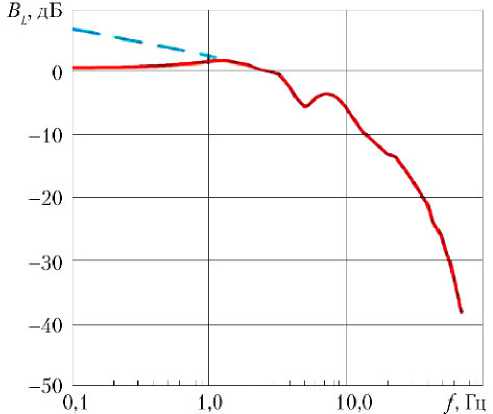
Рис. 4. Логарифмические амплитудно-частотные характеристики (а) и фазовые частотные характеристики (б) первой гармоники разомкнутого рулевого тракта
б)
Рис. 3. Логарифмические амплитудно-частотные характеристики (а) и фазовые частотные характеристики (б) первой гармоники замкнутого рулевого тракта
Для вычисления переходной характеристики замкнутого рулевого тракта, представленной на рис. 2, использовалась его упрощенная математическая модель, приведенная в работе [8]. В этой работе упрощенная математическая модель рулевого тракта представляет собой математическую модель рулевой машины с двухдроссельным электрогидравлическим усилителем, замкнутую отрицательной обратной связью в виде апериодического звена первого порядка.
На рис. 4, а в низкочастотной области неявно выражен наклон 20 дБ на декаду. Канонический вид ЛАЧХ в низкочастотной области показан на этом рисунке пунктирной линией. Это отличие объясняется влиянием нелинейности математической модели рулевого тракта.
Сравнение полученных результатов расчетов с результатами расчетов частотных характеристик рулевого тракта по той же математической модели, полученными двухканальным моногармони-ческим методом, показало возможность приближенного расчета частотных характеристик для предварительной оценки запасов устойчивости по амплитуде и фазе. Кроме этого, автором проведена с положительными результатами апробация методов расчета частотных характеристик разомкнутого рулевого тракта для частных случаев звена цепи обратной связи.
заключение
Разработаны методы расчета частотных характеристик разомкнутых сервоприводов и систем управления с использованием частотных характеристик замкнутых сервоприводов и систем управления по их линейным или линеаризованным математическим моделям, которые можно использовать для приближенного расчета частотных характеристик сервоприводов и систем управления по их математическим моделям с незначительными нелинейностями.
Выведены уравнения для расчета частотных характеристик разомкнутых сервоприводов и систем управления для частных случаев передаточной функции цепи обратной связи.
Исследована работоспособность разработанных методов расчета частотных характеристик разомкнутых сервоприводов и систем управления.
Разработанные методы позволяют за один счет получать частотные характеристики как замкнутого, так и разомкнутого сервопривода (как замкнутой, так и разомкнутой системы управления).
Список литературы Методы расчета частотных характеристик разомкнутых сервоприводов и систем управления
- Бабиков Н.А., Воронов А.А., Воронова А.А. и др. Теория автоматического управления / Учеб. для вузов по спец. "Автоматика и телемеханика". Под ред. А.А. Воронова. В 2-х ч. Ч. I. Теория линейных систем автоматического управления. 2-е изд. перераб. и доп. М.: Высшая школа, 1986. 376 с.
- Вавилов А.А., Солодовников А.И. Экспериментальное определение частотных характеристик автоматических систем. М.-Л.: Государственное энергетическое изд-во, 1963. 252 с.
- Дьяконов В.П. Справочник по расчетам на микрокалькуляторах. 3-е изд., доп. и перераб. М.: Наука, 1989. 464 с.
- Дьяконов В.П. Справочник по алгоритмам и программам на языке бейсик для персональных ЭВМ. М.: Наука, 1989. 240 с.
- Андреев Ю.Н., Белицкий Д.С. Расчет статических и динамических характеристик РП. ОФАП. Рег. № 780. 1979.
- Белоногов О.Б. Моногармонический метод автоинтегрирования с локальным осреднением коэффициентов Фурье для расчета частотных характеристик динамических объектов и систем управления // Вестник ФГУП НПО им. С.А. Лавочкина. 2013. № 4. С. 53-56.
- Белоногов О.Б. Моногармонический метод автоинтегрирования с полным осреднением коэффициентов Фурье для расчета частотных характеристик динамических объектов и систем управления // Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2013. № 4. С. 3-13.
- Белоногов О.Б. Двухканальный моногармонический метод автоинтегрирования для расчета частотных характеристик систем // Труды ФГУП "НПЦАП". 2014. № 1. С. 60-72.
