Методы управления движением миниспутников в комбинированных целевых режимах

Автор: Е.И. Сомов, С.Е. Сомов, С.А. Бутырин, Т.Е. Сомова, П.К. Кузнецов
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 6 т.27, 2025 года.
Бесплатный доступ
Развиваются методы наведения и управления движением миниспутников в группировках дистанционного зондирования Земли. Приводятся результаты, демонстрирующие эффективность созданных алгоритмов для комбинированных режимов сканирующей площадной и стереоскопической съёмки.
Группировка миниспутников ДЗЗ, наведение, управление, комбинированные режимы
Короткий адрес: https://sciup.org/148332866
IDR: 148332866 | УДК: 629.78:681.51 | DOI: 10.37313/1990-5378-2025-27-6-221-232
Methods of Minisatellite Motion Control in Combined Target Modes
Methods for guidance and motion control of mini-satellites at the Earth remote sensing constellations are being developed. The results are presented demonstrating the effectiveness of created algorithms for combined modes of scanning areal and stereoscopic surveying.
Текст научной статьи Методы управления движением миниспутников в комбинированных целевых режимах
После отделения миниспутника (МС) от разгонного блока на начальной орбите и раскрытия его панелей солнечных батарей (СБ) в связанной системе координат (ССК) спутник совершает ротационное движение в инерциальной системе координат (ИСК) с вектором угловой скорости ω переменного направления. После завершения начальных режимов МС должен располагаться на заданной солнечно-синхронной орбите (ССО) при стабильной ориентации в орбитальной системе координат (ОСК), а система управления, движением (СУД) готова к целевому применению. Здесь выделяются режимы успокоения, ориентации в ОСК, разгона роторов гиродинов (ГД) силового гироскопического кластера (СГК) до потребного значения их собственных кинетических моментов (КМ), перелёта на ССО с заданными значениями наклонения i , долготы восходящего узла (ДВУ) Q и орбитальной широты и . При одновременном разгоне только двух роторов в каждой паре ГД экономичность СУД в начальных режимах достигается гравитационной и магнитной стабилизацией каждого МС при ориентации их панелей СБ на Солнце [1].
В целевых режимах, при мониторинге участков землеобзора совокупностью маршрутов их сканирования телескопом матрицы оптико-электронных преобразователей (ОЭП) в его фокальной плоскости (ФП) работают в режиме временной задержки и накопления (ВЗН). На поверхности Земли маршрут съемки отображается следом проекций ОЭП, составляя полосу захвата. При известном орбитальном движении центра масс (ЦМ) спутника маршрут съемки определяется законом углового наведения МС, при котором происходит требуемое перемещение оптического изображения на поверхности матриц ОЭП.
С применением известных приемов космической геодезии авторами разработаны аналитические методы синтеза законов наведения МС при произвольном виде сканирующей съемки, которые основаны на анализе векторного поля скоростей движения изображения (СДИ) наземных объектов на матрицах ОЭП. Созданные методы конкретизированы для типовых маршрутов: трассовых, с выравниванием продольной СДИ, объектовой съемки – короткого маршрута с оптимальным начальным геодезическим азимутом, площадного землеобзора и стереоскопической съёмки заданных участков земной поверхности.
При чередовании маршрутов сканирующей съемки и быстрых поворотных маневров (ПМ) спутника управление его ориентацией выполняется СГК на основе четырёх ГД по сигналам бесплат-форменной инерциальной навигационной системы (БИНС) с астрономической коррекцией. Здесь имеется ряд требований к динамическим характеристикам СУД, обусловленных ограниченными ресурсами СГК по области вариации вектора КМ, а также по модулям угловых скоростей и ускорений его гиродинов.
В данной статье рассматриваются проблемы синтеза законов наведения, управления и динамики СУД в комбинированных целевых режимах перестраиваемой группировки МС.
МАТЕМАТИЧЕСКИЕ МОДЕЛИ МОНИТОРИНГА
И с пользуются стандарт н ые систем ы координа т (СК) - ине р циальная ( ИСК О ф X i YjZ * ,
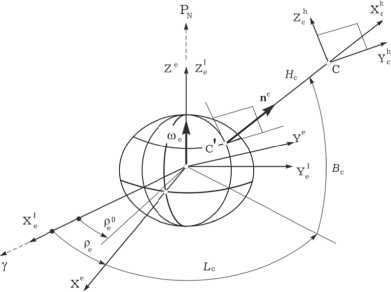
Рис. 1. Базисы Т , Е и Н ф с
базис I ф ) с начало м в центре З емли О ф ; геодезическая Гринви ч ская (ГСК О ф X e Y e Z e; , базис Е ) ; горизонтная (ГорСК C X c Yc h Z c , б азис Н с ) с геодезиче с кими координатами L c, В с, H с и началом в точке C с высотой H с по орту внешней нормали n e к поверхн о сти общеземного эл л ипсоида ( р ис. 1); ор б итальная ( О СК О x0у0z 0, базис О с ортами радиали г ° , трансвер с али т 0 и бинормал и n 0 ) и связанная с МС (ССК О xyz , базис В ) системы к о ординат с н ачалом в е го ЦМ О , рис. 2.
Вводятся телескопная СК (ТСК, оптический базис S с ортами si, i = 1,2,3 = 1 ^ 3 ) с началом в центре проектирования S (см. рис. 2), СК поля изображения Оixlу1 zl (ИСК, базис F с центром Оi в ФИ телескопа), и визирная система координат Оvxvу vz v (ВСК, базис V с ортами vi) с мат
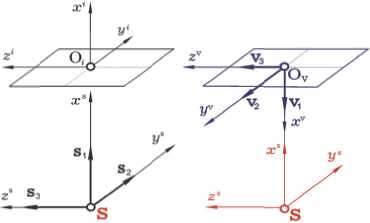
Рис. 3. СК поля и зображени я и базис V
риц а ми ОЭИ в плоскости у vО v z v , ри с . 3.
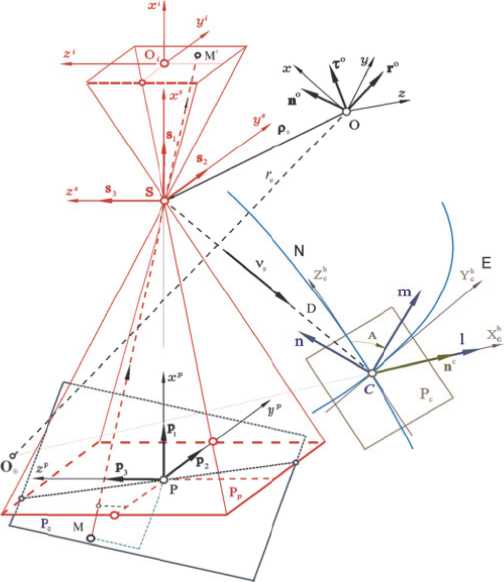
Рис. 2. Геометрия ска н ирующей с ъемки
Геомагнитная СК определяется в ГСК и применяется в модели магнитного поля Земли (МИЗ) с вектором магнитной индукции B . Ири обозначении векторов {•} = со1(-), [•] = 1ine(-), (•,•) и матриц (-)\ [-х] ориентация МС в ИСК определяется кватернионом Л = (X 0, X), X = {X i} и вектором о = е ‘ап(Ф / 4) модифицированных параметров Родрига (МИР) с ортом оси Эйлера е и углом Ф, а в ОСК - углами крена ф1 = Y, рыскания ф2 = у и тангажа ф3 =0 в после довательности 312.
Ири диадном произведении [а - b] векторов a, b G R3 модель движения МС с массой m, тензором инерции J, векторами положении г и скорости v описывается уравнениями г‘ + ®х г = v; о = В (о)®, В(о) = %(1- о 2)13 + ^([ох] + [о - о]);
Л = Л ° ®/ 2; w= D ( о ) о , D ( о ) = В - 1 ( о ) = [( 4/ (1 + о 2)]2 В ‘ ( о ); (1)
m ( v ’ + ю х v ) = Р e + F d; J(b +® х G = M e + M m + M 8 + M d.
Здесь векторы Р е и М е отражают тягу и управляющий момент электрореактивных двигательных установок (ЭДУ), вектор G = J ® + Н , где Н - вектор КМ СГК, векторы М m и М g = — Н -управляющие моменты магнитного привода (МП) и СГК, векторы F d и М d - возмущающие силы и моменты, а ( ■ ) - символ локальной производной по времени.
Поверхность Земли моделируется эллипсоидом вращения, сжатого в направлении полюсов, с полуосями ae, ce и коэффициентом полярного сжатия ap = 1 — (ce I ae) . Преобразование эллипсоидальных геодезических координат Lс, Bс, Hс в ортогональные геодезические координаты X‘,Yce, ZC точки С выполняется по аналитическим соотношениям хе = (Nс + H с) Свс Clci YC = ( Nс + Hc) С^'; Ze = ((1 — ep) Nc + Hc) Sbc, где Sa = sin a, Ca = cosa, N c = ae I(1 — epSp )112 и ep = (1 — (1 — ap )2)112 - радиус кривизны первого вертикала и эксцентриситет меридианного эллипса, соответственно.
Орт V s целеуказания из фиксированной в ССК точки S на заданный объект C на поверхности земного эллипсоида с координатами B c, L с, H с наиболее просто определяется в базисе Н с. Высота полета КА над земным эллипсоидом, мгновенное положение на нем подспутниковой точки и трасса спутника, как след положений точки О' на поверхности Земли, получаются расчетом эллипсоидальных геодезических координат B o , L o , H o по известным компонентам столбца r oe = {X 0 ,Y oe ,Z 0 } в базисе Е . Для упрощения синтеза законов углового наведения МС землеобзо-ра точка S совмещается с точкой O, что достигается при р b = 0 и приводит к тождеству r s e = r o e , хотя на рис. 2 эти точки намеренно разнесены.
Кватернион Л е ориентации телескопа в ГСК, столбцы Ю е и v е проекций векторов угловой и поступательной скоростей ТСК на оси оптического базиса S относительно геодезического базиса Е определяются соотношениями
Л: = Л о Л ье о A s b; Л: = Л s e о Ю е 12; ю s = T b s ( ® — С > е ); v S = Л; о v o ° Л ;, где матрица С b используется для координатного преобразования вектора из базиса I е в базис В , матрица T b учитывает угловую фиксацию телескопа в корпусе МС, а столбец v o представляет вектор скорости поступательного движения ЦМ миниспутника в ГСК.
ДВИЖЕНИЕ ИЗОБРАЖЕНИЯ ПРИ СКАНИРУЮЩЕЙ СЪЁМКЕ
Задача вычисления кватерниона ориентации Л связанного базиса В в инерциальном базисе I e , векторов угловой скорости Ю и ускорения Е в виде явных функций на заданном интервале времени, решается на основе векторного сложения всех элементарных движений телескопа (ТСК) в ГСК с учетом перспективы наблюдения при задании начальных значений координат наземного объекта и геодезического азимута A сканирования.
ss
Пусть при векторах Ю е и v e матрица С = || ctj || определяет ориентацию ТСК в ГСК, а скалярная функция D ( t ) представляет дальность наблюдения вдоль оси визирования. Тогда для любой точки М в ФП телескопа (см. рис. 2) продольная V y ( У ,y l ) и поперечная V zi (y i,z‘ ) составляющие вектора нормированной СДИ вычисляются по соотношению
V yi
i y
О
is q Уе1
-
i y i
ω
s
’еЗ
+ Zi Ю
s
’е2
~ .
V zi
i z
О
is q Уе2
-
ω
s
’ еЗ
-
ziω
s
’е1
.
is q Уе З
+
s
Ю 2 + yi Ю
’е1
Здесь zi = yl I fe и zi = zi I fe являются нормированными фокальными координатами с эквивалентным фокусным расстоянием телескопа fe, ql = 1 — (c2i.yi + c31zi )I c11 и компоненты вектора нормированной скорости поступательного движения V е1 = v е i (t )I D (t). Нетрудно убедиться, что в (2) обе компоненты вектора СДИ нелинейно зависят от положения элемента изображения относительно центра кадра - имеется полиномиальная зависимость второй степени относительно координат yi и zi. Такая нелинейность и некомпенсируемое изменение дальности наблюдения D (t) из-за поступательного движения МС относительно земной поверхности приводят к существенному отличию векторов СДИ в различных точках фото-приёмной структуры. Этот факт накладывает ограничение на размер мгновенного поля зрения телескопа при любом типе съемки. При численном интегрирования кинематического уравнения (1) с применением (2) получаются векторы угловой скорости ш, МПР о и кватерниона Л. Далее с помощью векторных сплайнов выполняется аппроксимация изменения кинематических параметров углового наведения - явном виде получаются векторы й (t), углового ускорения £ (t) и рывка £ (t)) для последовательности гладко сопряженных сканирующих маршрутов (СМ) и поворотных маневров (ПМ).
МАРШРУТЫ СКАНИРУЮЩЕЙ СЪЁМКИ В ЦЕЛЕВЫХ РЕЖИМАХ
Наиболее простым является режим трассовой съёмки, которая выполняется при постоянном положении линии визирования телескопа в ОСК - при постоянных значениях углов крена и тангажа МС относительно ОСК. В этом варианте съемки след линии визирования отражается на земной поверхности линией, эквидистантной (параллельной) трассе спутника - следу перемещения подспутниковой точки. В частности, что при съемке в надир след линии визирования совпадает с трассой, что и объясняет название метода съемки. При выполнении трассовой съемки с ВЗН для моментов времени t е Тs = [ts,tfs] в точке Оi должны выполняться два условия: компоненты вектора СДИ определяются по (2); вектор СДИ перпендикулярен оси О iz‘ ПСК.

Рис. 4. Маршруты трассово й съёмки Рис. 5. Кинемат и ческие пар а метры трассовой съёмки
Н а рисунках 4 и 5 предс т авлены от о бражения маршрутов т рассовой с ъ ёмки на к а рте и измене
ния кинематических параметров наве д ения миниспутника п р и такой съ ё мке.
При сканировании с выравниванием продольной СДИ в центре набора ОЭП должны выполняться условия Vy (0,0) = Wy = -Wy ID = const; Vz (0,0) = 0 с требуемой СДИ Wy. В результате получаются явные элегантные соотношения й и = - v se2 c311 сп; Ш s 2 = - v S 3; Ш ;3 = -Wy + v S 2. (3)
Н е смотря на небольшой недостато к (искривле н ие маршр у та) такая с к анирующа я съёмка обладает важным преимущест в ом - полу ч ение виде о информац и и самого в ысокого качества. На рисунке 6 представлены рас п ределения компонент вектора V y (0, z ) и Vz (0, z ) СД И при съемке с выр а вниванием продольно й скорости д вижения и зображени я .
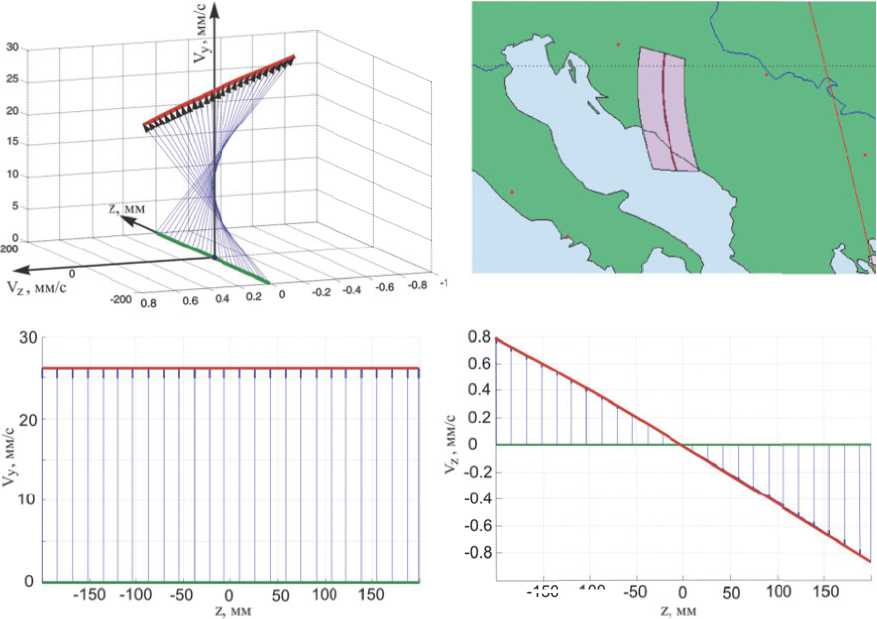
Рис. 6. Распределение про д ольных и п о перечных СДИ при сканирующе й съемке с в ы равниванием
-150 -юо
Осевые линии ортодро м ических ск а нирующих маршрутов соответств у ют геодез и ческим линиям заданной высоты над з емным эл л ипсоидом, т.е. здесь сканирова н ие выпол н яется по дуге «бол ь шого геодезического круга» ме ж ду точками начала t ; и конца t f маршрут а с заданными геод е зическими координатами. При т а кой съемк е для моментов времен и t е Т = [ t ;, t f] , когда на матрицах ОЭП формирует с я изображ е ние маршрута, в точк е О i долж н ы выполн я ться два условия: (i) компоненты векто р а СДИ удо в летворяют соотноше н иям V y (0, 0 ) = W ^ ; V Z (0,0) = 0, где W y = W yi / f e и W y = - Wsy / D = const - заданная продольна я СДИ; (ii) в е ктор СДИ п ерпендикулярен оси О z i ПСК и след о с и визиров а ния телескопа совпад а ет с дугой « большого г еодезического круга». При заданных геод е зических к о ординатах точек нач а ла и конца ортодроми ч еского маршрута геодезический азиму т A ( t J в н а чальный м омент вре м ени t ; та к ой сканир у ющей съемки определяется в горизонтно м базисе по явным аналитически м соотноше н иям.
Основная сложность синтеза закона наведения КА при ортодромической съемке состоит в соблюдении условия (ii). Созданный авторами метод синтеза закона такого наведения основан на двух этапах расчета с «внешним» назначением корректирующих поправок для приближенного обеспечения одновременно как ортогональности вектора СДИ в центре фокальной плоскости к оси Оizl, так и совпадения следа оси визирования телескопа с дугой «большого геодезического круга». Здесь на первом этапе формируется набор точек, соответствующих моментам времени t; и принадлежащих дуге указанного « геодезического круга», в которых орт направления сканирования имеет геодезический азимут, совпадающий с геодезическим азимутом орта, касательного к дуге «большого геодезического круга». С этой целью определяется орт, ортогональный плоскости «большого геодезического круга» и поворотом вокруг него на малый угол ф орта радиус-вектора, направленного из центра Земли в начальную точку маршрута, вычисляются параметры следа осевой линии маршрута на поверхности Земли и далее: 1) задается малая вариация угла ф и решается задача определения кватерниона ориентации КА, при котором проекция орта оси крена ССК на горизонтную плоскость направлена по текущему геодезическому азимуту, а также определяются соответствующие вектор угловой скорости МС и вектор СДИ в центре ФП телескопа; 2) считая, что на малом периоде Tu управления ориентацией МС при малости угла ф вектор его угловой скоро сти является постоянным с линейной зависимостью продольной СДИ от вариации угла ф, по явному соотношению назначается потребное значение угла ф, которое соответствует заданной продольной СДИ в центре ФП телескопа.
Этот кратко описанный алгоритм имеет ряд методических погрешностей, основная погрешность обусловлена предположением постоянства вектора угловой скорости КА на малом периоде цифрового управления Tu. При типовых параметрах ортодромической съёмки авторы выполнили тестовые расчеты законов наведения в полной модели движения МС. В результате установле «уход» от дуги «большого геодезического круга» всего на десятки метров при длине этой дуги 1600 км, а также практически полное выполнение требований к заданному значению вектора СДИ в центре ФП телескопа, что соответствует допустимым рассогласованиям в кинематических параметрах наведения.
П р и стереоскопической с ъ ёмке для п олучения д вух стерео п ар изобра ж ений заданного
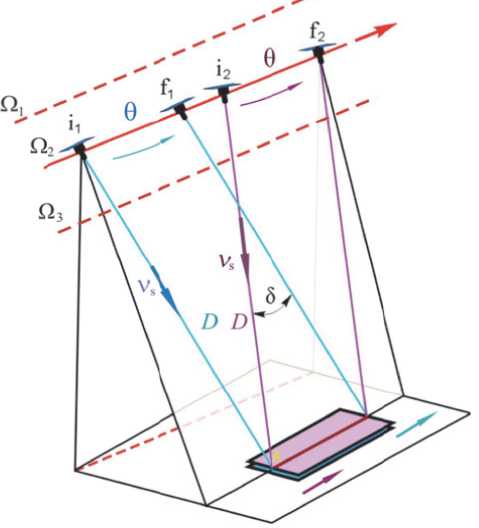
Рис. 7. Схема стереосъемк и с 2 стерео п арами
участка земной поверхности в процессе выполнения маршрутов его сканирования, с двумя ракурсами в каждой паре, учитывая невозможность обеспечения постоянства продольной СДИ при соблюдении основного условия D = const стереосъемки, приходится немного изменять значения азимута и продольной СДИ в центре набора ОЭП. На рис. 7 приведена упрощенная схема стереосъемки, где для иллюстрации идеи эта поверхность считается неподвижной плоскостью. Здесь красными линиями отмечены ССО трёх МС при трёх различных значениях их ДВУ Q i, начальных (initial) i j и конечных (final) fj. точках 1-го (j = 1, голубой цвет) и 2-го (j = 2, бордовый цвет) маршрутов. Для получения первой «продольной» стереопары в плоскости орбиты с ДВУ Q 2 начало A первого сканирующего маршрута (СМ1) определяется при угле 51 = —5 / 2 между траверсом точки A на по ложение МС и ортом целеуказания V s на эту точку при заданном угле конвергенции 5 . Это условие определяет также момент времени t^ начала СМ1 и дальность Di(1) = D наблюдения точки A. Начиная с этой точки для СМ1 выполняется расчет закона углового наведения спутника на первом шаге малой длительности Ts по соотношениям (3) при итерационной вариации значений азимута A маршрута и продольной СДИ так, чтобы дальность наблюдения точки на A земном эллипсоиде Di(1) = D . Далее описанная процедура повторяется с периодом Ts в очередной достигнутой точке
МС1 и процесс численного п остроения закона угл о вого навед е ния МС на первом ма р шруте съемки заве р шается по превышени ю заданной длины ска н а L^ СМ1 н а земном э л липсоиде.
Момент времени t-2) начала СМ2 определяется из условия достижения дальности D наблюдения точки A при значении угла 52=5/2 между траверсом этой точки на спутник и ортом целе указания V s на точку A. Для совпадения СМ1 и СМ2 на земном эллипсоиде шаги численного построения закона углового наведения МС на втором сканирующем маршруте выполняются также с периодом Ts, обеспечением постоянства дальности D при начальном азимуте A(t^) за счет вариации значения продольной СДИ Wly, когда компоненты вектора СДИ определяются условия- ми Vy (0,0) = Wy ; Vz (0,0) = 0, ортогональности вектора СДИ и оси ОiZ ПСК в этой точке и совпадения следа оси визирования телескопа с центральной линией СМ1. Процесс построения закона углового наведения на втором маршруте завершается при его длине L(s2) = L^. Аналитическое представление законов наведения спутника в ИСК для двух маршрутов сканирующей стереосъемки основывается на интерполяции численных данных векторной функцией МПР О как векторного сплайна 7-го порядка [2].
Вторая «поперечная» ст е реопара ф о рмируется двумя МС н а соседни х (слева и с п рава) симметрич н о расположенных СС О при их Д В У Q j , О 3 = Q 2 + 8 /2, см. красные пункти р ные линии на рис. 7. Здесь каждому мин и спутнику д остаточно выполнить т олько одн о сканиров а ние заданного учас т ка земной поверхности.
ГРУППИРОВКА МИНИСПУТНИКОВ РЕГИОНАЛЬНОГО МОНИТОРИНГА
Баллистическое обосно в ание мног о целевой группировки региональ н ого монит о ринга состоит в определении данных, пр и которых о беспечивается требу е мая повто р яемость п р охождения их трас с через заданные точк и региона н а земной поверхности. Здесь ССО всех спутн и ков в группировке имеют одинаковую высоту и пр о ходят чер е з единый восходящий узел (ВУ) о рбиты на земной поверхности, но в ра з ное время при длительности T r повторяе м ости. Буде м считать, что группировка состоит из ло к альных гр у пп мини-с п утников и в каждой л окальной г р уппе имеется K спутников в одном на п равлении и х полета, например п ри K = 3 : левый (#1) , центральный (#2) и правый (#3) с один а ковой ДВУ . Исходны м и данным и здесь явл я ются пара м етры орбиты центрального МС локально й группы и длительность интерва л а повторя е мости. Зде с ь необходимо определять число N цент р альных м и ни-спутни к ов (т.е. чи с ло локаль н ых групп) в составе всей группировки и начальные п араметры орбит этих спутников для решен и я всех возможных задач мониторинга наземных объектов, пр и надлежащих заданн ы м диапазо н ам значе н ий геодезической широты B и геодезич е ской долг о ты L .
При одинаковой высоте полета МС параметры их орбит о т личаются т олько вре м енем прохожден и я восходящего узла с ДВУ Q. Ч и сло центр а льных ми н и-спутник о в определ я ется с учетом солн е чной освещенности р е гиональн ы х объектов монитори н га, котора я зависит о т их геодезических координат, даты и вр е мени набл ю дения. Наилучшие ус л овия опти ч еского мо н иторинга возник а ют в диапазоне с t ; = 9 до t f = J 5 часов местного врем е ни. Распо л ожение сп у тников в каждой локальной группе опре д еляется к а к типом, так и стилем с канирующ и х маршру т ов. Например, плос к ости ССО с тремя МС в локально й группе м о гут быть «разнесены» п о ДВУ на у г ол AQ = 0,84 град . При ССО высотой 570 км и интер в але повто р яемости T r = J час дл я площадно г о мониторинга поверхности всей Земл и в любое в ремя суто к МС долж н ы распол а гаться в 2 4 орбитальных плос к остях с шагом относи т ельного ра з ворота на угол AQ c = (361[град]/[ 2 4 ч])[1 ч]= 15,04 град. При региональном же площадн о м монито р инге с приемлемой со л нечной ос в ещенностью достаточное число спутников N = 21, р а змещенн ы х на семи ССО, рис. 8 и 9.
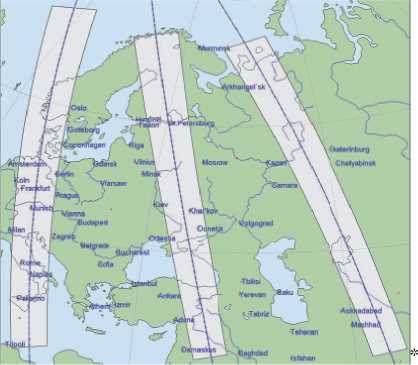
Рис. 8. Полосы регионального мон и торинга Ев р опейской ч асти Восто ч ного полу ш ария
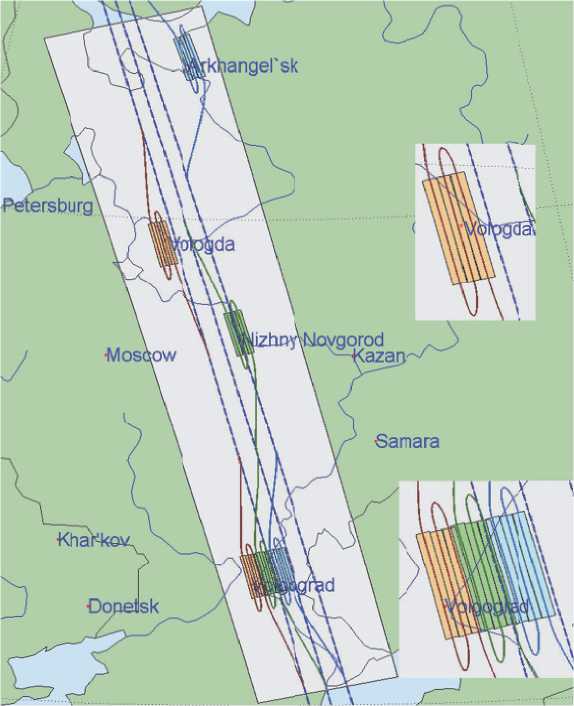
Рис. 9. Региональ н ый монито р инг в заданном диап а зоне геоде з ической ш и роты

Рис. 10. Схема СГК и об л асть вари а ции его КМ
Р и сунок 9 п редставля е т результаты план и рования п л ощадной с ъ емки городов Пово л жья (Волг о град и Нижний Новгород) и Се в еро-Запад н ого регио н а (Вологда и Арха н гельск) в п олосе обз о ра при изменени и геодезич е ской ши-р о ты B от 45.5 до 66 град. В эт о й полосе м о ниторинг выполн я ет одна л о кальная гр у ппа трех минисп у тников: л евый МС#1, оранжевые скан ы ; централь н ый МС#2, з еленые сканы и пр а вый МС#3, с каны голу б ого цвета.
Здесь демонстрируется назначение комбинированных режимов мониторинга для каждого МС, например съемка окрестностей Волгограда выполняется согласованно тремя мини-спутниками, а съемка остальных трех городов - отдельными миниспутниками.
ЗАКОНЫ ЦИФРОВОГО УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ
В СУД миниспутника п р именяется СГК с четырьмя ГД по с хеме 2 -SP E , рис. 10. В е ктор КМ p -го rah „ ( р „ ) = h8 h p ( р „ ), p = 1 ^ 4, и м еет орт h p и собстве н ный кинет и ческий мо м ент hg, одинаковый для всех ГД. Век т ор h ( P ) н ормированного КМ к л астера ги р одинов в ы числяется как h ( P ) = Е h p (в p ), где Р = { Р p }, а вектор управляющего момента СГК ф о рмируетс я по соотношениям М g = — Н ‘ = — hg A h( P ) u g, Р = u | с цифровым управлен и ем u g и матрицей A h ( p ) = Э h ( p ) / Э р .
Законы углового наведения МС п редставляются прогр а ммными з начениям и кватерниона Л p ( t ), векторов угловой скорости ГО p ( t ) и углового уск о рения Е p ( t ). Кватер н иону ошибки Е = ( e 0, е ) = Л p ° Л при е = { e i } соот в етствуют м атрица С е = I 3 - 2[ e x ]Q ‘ при Q е = 1 3 e 0 + [ е х ] и ве к тор ошибки ориентации 8ф = {8 ф i } = 2 e 0 е . С толбец о ш ибки по угловой скор о сти представляется в виде 8 го = {8го i } = ГО - С е ГО p ( t ).
При дискретной фильтрации вектора рассогласования е = -5ф получаются значения вектора е k в моменты времени tk, k е N0 = [0,1,2,..) с периодом Tu, которые применяются в рекуррентном дискретном законе управления кластером гиродинов g,+х = Bgt + С е ^ ; тЛ = К ( gt + Р е ^) ; М f =ГО,Х Gt + J(C ек Е p + [С ек ГО pp Х]ГО, + in J. (4) к +1 k k k k k k k k k к к k к
Здесь вектор G k = J ro k + Н k и для ис к лючения избыточнос т и кластер а ГД вектор его управляющег о момента М | формируется с исп о льзование м явного аналитическ о го распред е ления вектора КМ СГК между гиродинами и далее «п е ресчитыва е тся» в век т ор u g циф р овых ком а нд по их угловым скоростям [20]
РЕЗУЛЬТАТЫ КОМПЬЮТЕРНОЙ ИМИТАЦИИ
Планирование площадного мониторинга выполнялось с условием достижения наивысшего качества получаемого изображения - соответствующие МС находятся в надире в момент съемки точек привязки центров локальных площадок.
На рисунке 11 представлена карта c тремя локальными площадками мониторинга Босфора и акватории Мраморного моря. Каждая площадка содержит три СМ, которые выполняются тремя МС - левым (МС #1, розовые сканы), центральным (МС #2, желтые сканы) и правым (МС#3, синие сканы) по расположению их трасс в порядке возрастания ДВУ Qi = 370.233 + AQ- (i -1), где i = 1 ^ 3, AQ = 0,84 град, i - номер МС. Здесь каждая площадка имеет размеры 150х44.5 км2, а три площадки составляют площадь 150х131,8 км2.
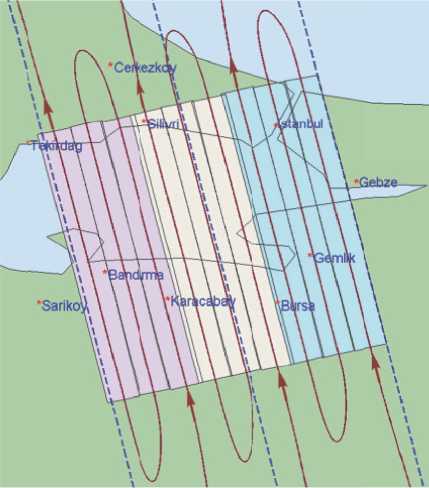
Рис. 11. Съемка окрест н остей Ста м була
К о мпьютерная имитация монит о ринга с полу ч еним стерео изображений выпо л нена для МС н а ССО с учетом шума Б ИНС при и з мерении ориентации и скорости с периодом T q = 1/8 с, их дискретной фильтраци и и управле н ии СГК с пер и одом T u = 1/4 с.
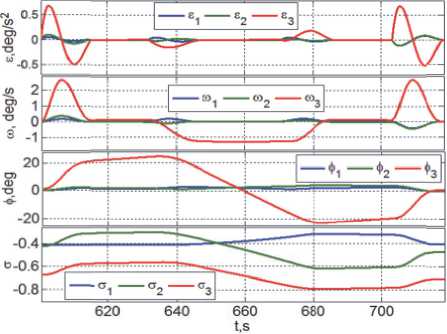
Рис. 12 . Закон у г лового на в едения МС#3
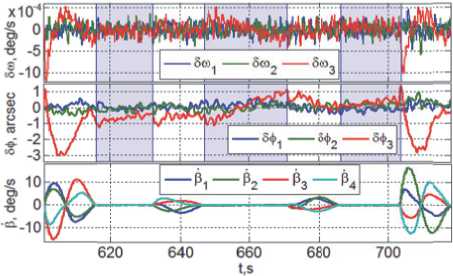
Рис. 13. МС#3, о ш ибки СУД и скорости ГД
Маршруты съёмки, вкл ю чая два сте р ео с углом 8 = 30 гра д , представ л ены на ри с . 14:
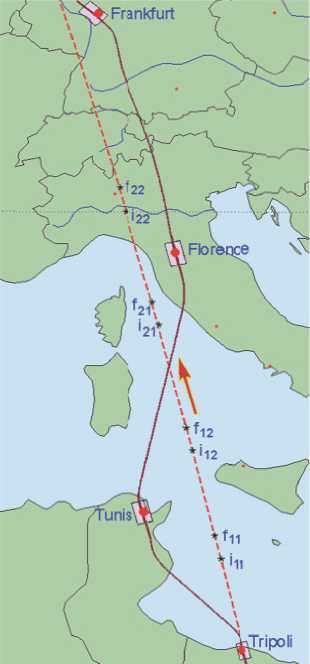
Рис. 14. Маршруты мониторинга
-
• скани р ующая тр а ссовая съ е мка, мар ш рут Триполи, t е [539.25,549.25] с ;
-
• ПМ маршрут Т риполи ^ стерео CM1 Тунис, t е [549.25,580.75] с ;
-
• стерео CM1 Тунис с азимуто м A = - 13. 4 2 град, точки in и f11 , t е [580.75,591.25] с;
-
• ПМ с терео CM1 Тунис ^ стере о CM2 Тунис, t е [591.2 5 ,647.25] с ;
-
• стерео CM2 Тунис с азимуто м A = - 13. 4 2 град, точки i12 и f12 t е [647.25,658] с;
-
• ПМ стерео CM2 Тунис ^ стерео C M 1 Флоренция, t е [658,690.75] с;
-
• стерео CM1 Флор е нция, A = - 14.18 гр а д, точки i21 и f21 , t е [690.75,701. 5 ] с;
-
• ПМ сте р ео CM1 Ф л оренция ^ стерео C M 2 Флоренция, t е [701.5,756] с;
-
• стерео CM2 Флор е нция, A = - 14.18 гр а д, точки i22 и f22 , t е [756,766.75] с;
-
• ПМ стерео CM2 Ф лоренция ^ марш р ут Франкфурт, t е [766.7 5 ,810.75] с ;
-
• Франкфурт, A = - 4 5 град, t е [810.75,820.75] с.
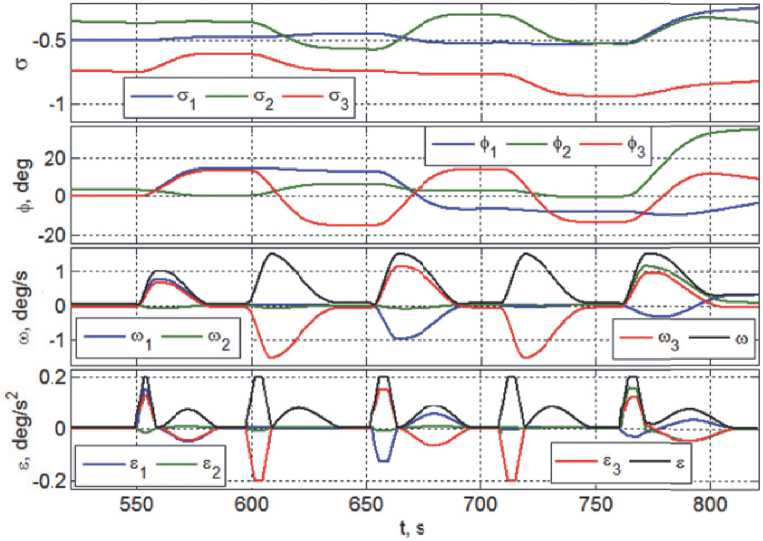
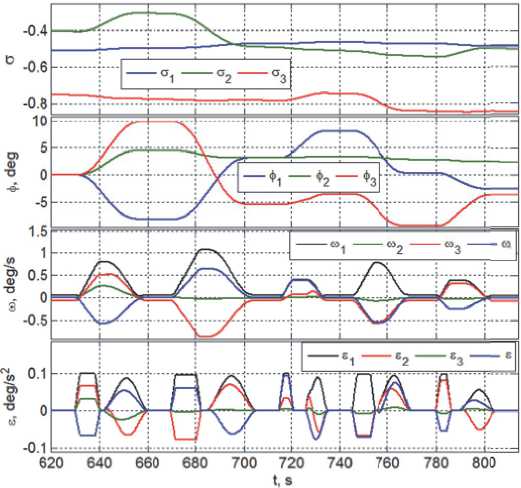
Рис. 15. Закон наведения МС для выполнения маршрутов мониторинга
На рисунке 15 приведен синтезированный закон наведения спутника для выполнения маршрутов сканирующей съемки указанных видов и поворотных маневров между ними. Здесь первые два графика представляют ориентацию ССК относительно ИСК (вектор МПР о = { ст i } ) и оск (углы крена ф 1 = y , синий цвет; рыскания ф 2 = ^ , зеленый цвет и тангажа ф 3 =0 , красный цвет). На следующих двух графиках рис. 15 представлены изменения компонент векторов угловой скорости и угло-
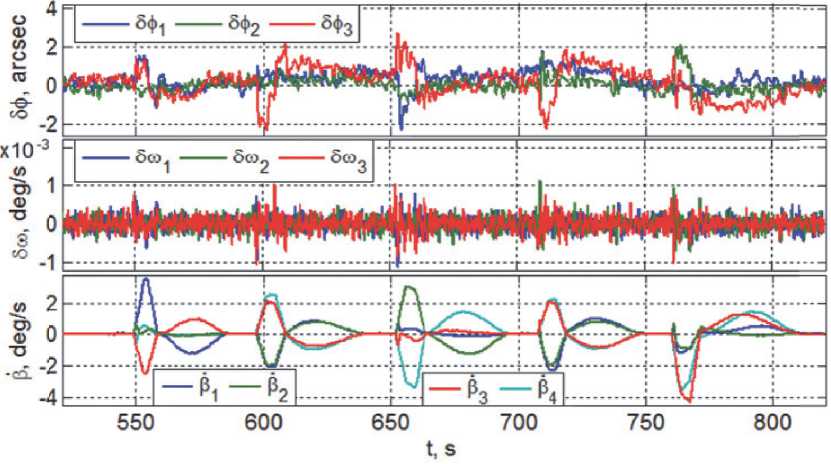
Рис. 16. Погрешности реализации закона наведения и угловые скорости гиродинов вого ускорения, помеченные такими же цветами, и дополнительно приведены вариации модулей этих векторов, отмеченные черным цветом. Результаты на рис. 16 демонстрируют эффективность работы гиросиловой СУД с синтезированными алгоритмами цифрового управления СГК при реализации синтезированного закона наведения, см. рис. 15. Здесь приведены компоненты векторов погрешностей δφ и δω по углам и угловым скоростям, помеченные указанными выше цветами, а также угловые скорости гиродинов.
Выполненный анализ движения изображения в ФП телескопа для всех рассмотренных маршрутов сканирующей съемки показал, что точность наведения и стабилизации углового движения МС гарантирует отсутствие «смаза» получаемого электронного изображения для всего набора матриц оптико-электронных преобразователей.
ЗАКЛЮЧЕНИЕ
В статье получили развитие методы синтеза законов углового наведения геодезических миниспутников в региональных группировках при сканирующих комбинированных режимах, которые основаны на авторских соотношениях, связывающих движение изображения в фокальной плоскости телескопа с кинематическими параметрами пространственного перемещения миниспутника. Представлены результаты компьютерной имитации площадного и стереоскопического мониторинга заданных участков земной поверхности, выполняемых группировкой миниспутников на солнечно-синхронных орбитах.
