Методы задействования синергетических информационных ресурсов при управлении угловым движением автоматического космического аппарата

Автор: Ковтун Владимир Семенович, Павлов Александр Николаевич, Соколов Борис Владимирович, Павлов Дмитрий Александрович, Воротягин Валентин Николаевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Системный анализ, управление и обработка информации
Статья в выпуске: 1 (32), 2021 года.
Бесплатный доступ
Основным условием выполнения программы полёта автоматического космического аппарата является его ресурсное обеспечение. Ресурсное обеспечение может быть пополнено за счёт синергетических наблюдений за процессами в случаях частичного, полного отсутствия или недостатка измерительной информации в одних объектах управления за счёт измерения параметров процессов, характеризующих работу других объектов управления. В качестве примера рассматривается ресурсное обеспечение процесса управления движением относительно центра масс за счёт синергетических наблюдений в случаях отсутствия инерционного измерителя вектора угловой скорости в системе управления движением геостационарного спутника связи «Ямал-200». При этом в основу наблюдения положена операция транзитивного замыкания бинарного отношения, заданного на базисном множестве процессов в бортовых системах и наземных средствах радиотехнического взаимодействия с бортовыми системами автоматического космического аппарата
Автоматический космический аппарат, процесс управления, измерительная информация, бинарные отношения, транзитивное замыкание, ресурсное обеспечение
Короткий адрес: https://sciup.org/143178145
IDR: 143178145 | УДК: 681.51 | DOI: 10.33950/spacetech-2308-7625-2021-1-127-141
Leveraging synergetic information resources for angular motion control of unmanned spacecraft
A key condition for accomplishing a mission of an unmanned spacecraft consists in providing it with resources. Resources can be replenished through synergetic observations of processes in cases where measured data are partially or fully missing or lacking for some of the controlled objects by means of measuring parameters of the processes characterizing the operation of other controlled objects. As an example, the paper discusses provisioning of resources for the process of controlling the motion about the center of mass by means of synergetic observations in cases where no inertial instrument was available for measuring the angular rate vector in the system controlling the motion of the geostationary communications satellite Yamal-200. Specifically, the observation is based on the operation of transitive closure of the binary relation defined on the base set of processes in the onboard systems and ground assets for radio interactions with the onboard systems of the unmanned spacecraft
Текст научной статьи Методы задействования синергетических информационных ресурсов при управлении угловым движением автоматического космического аппарата
Система управления движением (СУД) геостационарного спутника связи (ГСС) «Ямал-200» — результат хорошо сформулированного и эффективно реализованного типового решения задач управления движением автоматических космических аппаратов (АКА) в виде трёх функционально объединённых контуров: кинематического, навигационного и динамического [1]. СУД входит в состав бортового комплекса управления, включающего в себя следующие элементы для решения задач ориентации АКА:
-
• датчиковая аппаратура: гироскопический измеритель вектора угловой скорости (ГИВУС); два блока определения координат звёзд (БОКЗ); блок определения координат центра Земли (БОКЦ); блок определения координат Солнца;
-
• бортовая цифровая вычислительная система;
-
• исполнительные органы: комплект управляющих двигателей-маховиков (КМХ).
С использованием бортового комплекса управления производится управление приводами системы ориентации солнечных батарей (СОСБ), электро-ракетными и газодинамическими реактивными двигателями.
Служебная система управления АКА ГСС «Ямал-200» включает в себя бортовые радиотехнические средства, снабжённые радиомаяком (РМ). Управление полётом аппарата производится через единую интегрированную систему, решающую задачи ориентации, манёвров, управления всеми системами с использованием бортовых вычислительных средств. Центр управления полётом АКА является частью единой автоматизированной системы автономного управления полётом, обеспечивающей работу бортового радиотехнического комплекса (БРК) системы спутниковой связи.
При штатной работе ГИВУС датчик БОКЗ включается периодически для коррекции бесплатформенной инерциально-навигационной системы (БИНС), на базе которой построена работа функциональных контуров [1]. При отказе ГИВУС функцию измерителя приращений углов поворота аппарата могут выполнять БОКЗ. Однако, суммарный ресурс непрерывно работающих БОКЗ не обеспечивает полёт АКА в течение длительного срока эксплуатации — 15 лет и более.
Критичным для управления угловым движением в СУД после отказа ГИВУС является суммарный ресурс БОКЗ1, 2. Для примера приведём оценку критичности отказа для АКА «Ямал-200». Номинальный ресурс каждого прибора оценивается продолжительностью работы P ρ = 10 4 ч и числом включений Pz = 2∙10 4 . При этом продолжительность непрерывной работы каждого прибора регламентируется поочерёдным их включением. При штатной работе в паре с ГИВУС планируется в среднем по три включения в сутки одного БОКЗ общей продолжительностью не более 1 ч.
На выполнение 15-летней программы полёта, с учётом выполнения начальных тестовых режимов и регламентных включений~, расчётная нагрузка на два прибора P Σρ ≈ 5,5∙10 3 ч по продолжитель-~ности работы и по числу включений P Σ z ≈ 1,7∙10 4 . Проектный расчёт выполнен таким образом, что в случае отказа одного прибора в начале полёта исправный оставшийся прибор позволит функционально обеспечить выполнение всей программы. При отказе ГИВУС в начале полёта и выполнении программы полёта на одних БОКЗ на~грузка на два прибора может составить P Σρ ≈ 1,3∙10 5 ч. Возникновение аномальной ситуации необходимо рассматривать на разных этапах выполнения программы полёта.
При этом актуальной всегда является задача по устранению недостающего ресурса за счёт периодических включений БОКЗ только для указанной коррекции. А недостающий ресурс по продолжительности работы БОКЗ необходимо восполнить за счёт ресурсов других бортовых систем (БС) и наземных радиотехнических средств управления БС и БРК, выполняющих функцию измерителя углового движения АКА.
Постановка задачи: провести анализ возможностей ресурсного обеспечения полёта АКА ГСС «Ямал» в процессе управления угловым движением при отказе ГИВУС за счёт синергетических информационных ресурсов БС [2], а также задействованных для управления БС и БРК наземных радиотехнических средств с минимизацией включения БОКЗ для коррекции БИНС.
Построение когнитивной карты наблюдения за бортовыми процессами при угловом движении аппарата
Построение когнитивной карты производится на основе принципа образносимволического мышления по результатам наблюдения за процессами на борту АКА в условиях аномальных полётных ситуаций [3]. Согласно указанному принципу, для полного или частичного восстановления функций отказавшего объекта управления (ОУ) (бортовой системы или её элемента) используются информационные модели утраченных процессов, оставшиеся в моделях кластеров в виде взаимосвязей информационных моделей процессов отказавшего ОУ с информационными моделями процессов в работающих ОУ [3]. Под информационной моделью понимают информацию, характеризующую существенные свойства и состояние процесса, а также взаимосвязь с внешней средой [4]. Кластер процессов — объединение процессов в агрегате функционального объекта через бинаризацию многоместных отношений по входным-выходным воздействиям, позволяющим описать параметрические характеристики способа действия, характеризующегося физическими преобразованиями материальных, энергетических и информационных входов внутри объекта, для формирования параметров процессов на выходе объекта [5].
В данном случае рассматривается отказ ГИВУС, функционально предназначенного для измерения угловой скорости АКА. До отказа прибора между процессом измерения текущих значений вектора угловой скорости →ω( t ) для определения приращений вектора угла конечного поворота АКА d →ϕ( t ) и процессами в других БС установлены основные информационные связи в виде прямых отображений: →
-
• сложного теплового процесса T ( t ) на внешних поверхностях конструкции АКА
d → T ( t ) = → f 1 ( Q P ( d ϕ→( t ));
. (1)
→ω(t) = →ϕ(t), где QP = QП – QИ — мощность результирующего теплового потока; QП, QИ — мощности поглощённого и излучённого тепловых потоков на освещённой поверхности АКА, соответственно [6];
-
• вектора определения угла конечного поворота АКА в матрице фотоприёмных линеек — «приборов с зарядовой связью (ПЗС)» (матрицы ПЗС) БОКЗ — через вычисления по измеренным значениям яркости звёзд
→ d ϕ→Θ(t) = f2(→ω(t)); (2)
-
• угловых компонент крена ϕ . Bx ( t ) и тангажа ϕ . Bz ( t ) АКА в измерительной матрице из фотоприёмных линеек — матрицы ПЗС БОКЦ
→
( d ϕ . Bx ( t ), d ϕ . Bz ( t )) T = f 3 (→ω( t )); (3)
-
• вектора суммарного кинетического момента АКА [7]
→ G ( t ) = → f 4 (→ω( t )), → G ( t ) = → H ( t ) + → K ( t ), (4) где → K ( t ) — вектор → кинетического момента корпуса АКА; H ( t ) — вектор кинетического момента КМХ;
-
• токов поворотных солнечныx батарей СБ1 ( I 1 ) и СБ2 ( I 2 ) [8]
( dI 1 ( t ), dI 2 ( t )) T = → f 5 (ϕ СБ1 , ϕ СБ2 , →ω( t )), (5)
где ϕ СБ1,2 — фиксированные углы поворота СБ , 1 и СБ2.
Кроме этого, между процессом измерения вектора угла конечного поворота →ϕ(t) наземными радиотехническими измерительными средствами служебного канала управления и БРК спутниковой связи существуют информационные взаимосвязи в виде прямого отображения:
-
• пеленгационной характеристики изменения мощности радиосигнала РМ на приёмных земных измерительных станциях в зависимости от угла поворота аппарата по рысканию [9]
dP ( t ) = f 6 ( d ϕ y ( t )), (6)
где ϕ y — угол рыскания АКА;
-
• измерения → изменений мощности радиосигналов dU ( t ) = ( dU 1 ( t ), dU 2 ( t ), …, dUq ( t )) T в q -х транспондерах наземных станций приёма спутниковой связи [10], полученных от ретрансляторов БРК
→→ dU(t) = f7(d ϕ→(t)). (7)
По результатам прямого отображения углового движения АКА в бортовых и наземных радиотехнических процессах построена когнитивная карта наблюдения (рис. 1). Кроме ранее введённых обозначений в выражениях прямых отображений углового движения АКА представлены дополнительные обозначения внешних факторов: QU — инфракрасное излучение горизонта Земли; Q Θ — световое излучение звёзд; Ec — интегральная плотно → сть потока солнечного излучения; MB ( t ) — главный вектор внешнего возмущающего момента, действующего на поверхность АКА.
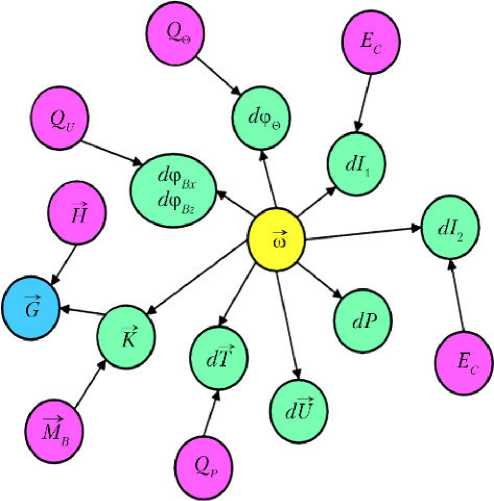
Рис. 1. Когнитивная карта наблюдения за бортовыми процессами при угловом движении аппарата «Ямал-200» Примечание. Обозначения см. в тексте.
Оценка результатов наблюдений для решения задач ориентации аппарата
Реализация программы полёта АКА предусматривает выполнение трёх режимов управления движением относительно центра масс:
-
• построение орбитальной ориентации (ОСК);
-
• поддержание орбитальной системы координат (ОСКП);
-
• построение и поддержание солнечной ориентации (СО).
При штатном управлении постоянно используется режим ОСКП. Два других — в начальный тестовый период управления полётом АКА и в аномальных ситуациях, связанных с потерей ориентации. Каждый из перечисленных случаев наблюдения определил информационные зависимости, определяющие работу «датчика внешней информации» по угловому положению АКА в пространстве. Для использования информационных зависимостей в управлении угловым движением АКА необходимо перейти от прямого к обратному отображению перечисленных процессов (1)–(7):
→ω( t ) = K 1 → f 1 –1 ( Q P ( dT ( t ));
→
ω( t ) = K 2 f 2 –1 ( d ϕ Θ ( t ));
→
(ω x ( t ), ω z ( t )) T = K 3 f 3 –1 ( d ϕ Bx ( t ), d ϕ Bz ( t ));
→ω( t ) = K 4 → f 4 –1 [→ G ( t )];
→ω( t ) = K 5 → f 5 –1 (ϕ СБ1 , ϕ СБ2 , dI 1 ( t ), dI 2 ( t ));
d ϕ y ( t ) = K 6 → f 6 –1 ( dP ( t ));
→→ d ϕ→(t) = K7f7–1(dU(t)), где K1, ..., K7 — коэффициенты функциональности, характеризующие степень задействования устройств для выполнения функции измерителя приращений углов поворота аппарата в режиме ориентации. Данные коэффициенты определяются отношением числа задействованных параметров отдельного устройства в алгоритме управления к суммарному числу параметров всех устройств в этом же а→лгоритме.
Отображение f 2 –1 соответствует штатной работе БОКЗ, позволяющей выполнить все три режима ориентации, K 2 = 1.
Отображение f 3 –1 соответствует штатной работе БОКЦ при построении местной вертикали, тем самым обеспечивая построение и поддержание ОСК по каналам крена ϕ x и тангажа ϕ z , K 3 = 0,67. Для построения и поддержания ориентации АКА в ОСК по каналу рыскания используется радиопеленгатор (РП), которому соответствует отображение → f 6 –1 ,
K 6 = 0,33. →
Отображение f 4 –1 соответствует разработанному методу управления поддержанием ОСК АКА по прогнозу изменения вектора кинетического момента в КМХ [7, 11] через математическое моделирование выражения:
→H(t) = →G(t) – →K(t), (8) → → t→ где G(t) = G0 + ∫ MB(t)dt — суммарный 0
вектор кинетического момента АКА; → G 0 = ( GOX , GOY , GOZ ) T — начальный вектор суммарного кинетического м → омента АКА в момент времени t = 0; MB ( t ) = ( M Г ( t ), M М ( t ), M С ( t )) T — главный вектор момента, обусловленного внешними возмущающими силами, действующими на АКА (грави-тационны → ми, магнитными, светового давления); K ( t ) = J ω→ 0 ( t ); J — тензор инерции АКА; →ω 0 ( t ) = (0, 0, ω 0 ) T ; ω 0 — орбитальная угловая скорость АКА на геостационарной орбите.
Для реализации метода управления поддержанием ОСК АКА по прогнозу без измерителя угловой скорости используется априорная информационная модель (информационный образ) кластера, в котором применяется математическое описание взаимосвязи векторов угловой скорости АКА →ω 0 ( t ) и кинетического момента КМХ H →( t ) = ( Hx ( t ), Hy ( t ), Hz ( t )) T . Общими в информационной модели кластера являются параметры ω 0 , J , М Г , М М , М С , Hx , Hy , Hz . Из них компоненты вектора → H ( t ) вычисляются по измерениям угловой скорости вращения маховиков.
Прогноз изменения вектора кинетического момента КМХ производится по зависимости (8). Для управления используется КМХ, состоящий из четырёх маховиков. Оси вращения трёх основных маховиков расположены вдоль осей связанного базиса АКА, а четвёртого резервного — по диагонали куба, рёбрами которого являются единичные векторы кинетических моментов роторов основных маховиков [7].
Образно-символическое управление по информационной модели кластера не имеет обратной связи, которая использовалась бы для обеспечения необходимой точности поддержания ОСК с учётом погрешности в прогнозе изменений вектора кинетического момента при воздействии на АКА моментов внешних сил. Чтобы создать обратную связь, в информационную модель кластера была введена параметрическая вектор-функция f 1 –1 зависимости температуры на поверхности АКА от его углового положения в пространстве при поддержании ОСК. С этой целью использовалось множество температурных параметров
MT = MT 1 ∪ MT 2 ∪ MT 3 = { Tj 1 , j = 1, …, m 1 } ∪
∪ { Tj 2 , j = 1, …, m 2 } ∪ { Tj 3 , j = 1, …, m 3 }, где j — номера температурных датчиков (ТД) на поверхности АКА.
Параметрическими функциями были экспериментально подтверждённые математические зависимости углов ориентации от температуры освещённого Солнцем аппарата в соответствующих подмножествах множества МT [6] →
→ω( t ) = (ϕ . ( t ), ϕ . ( t ), ϕ . ) T = Kf –1 ( M , M , M ). xyz
Наиболее чувствительными к отклонению аппарата от вертикали (по ϕ x и ϕ z ) оказались температурные датчики, установленные на нижней торцевой панели (НТП), которая обращена во время полёта в сторону открытого космоса [6, 12]. На НТП для изучения свойств материалов в условиях полёта АКА на геостационарной орбите были установлены экспериментальные калориметрические устройства (КУ), представляющие собой образцы с тремя видами терморегулирующих покрытий — зеркальным, белым силикатным и плёночным. Под каждым КУ установлены ТД. В состав первого MT 1 и третьего MT 3 подмножеств входили температуры КУ со всеми видами покрытий, а также температуры покрытия в виде экранно-вакуумной изоляции и корпуса НТП, расположенного под ней. Второе подмножество MT 2 состояло из температур, измеряемых датчиками, размещёнными на «северной»
и «южной» панелях аппарата [12]. По измерениям температуры производилась корректировка углового положения АКА, после чего уточнялся прогноз изменения вектора кинетического момента КМХ.
В результате построена информационная модель М KL 1 кластера ( K L 1 ), в которой сформулированы информационные зависимости между перечисленными параметрами
М KL 1 ⇔ { ω 0 , J , М Г , М М , М С , H x , H y , H z , M T 1 , M T 2 , M T 3 }, (9) что позволило восстановить утраченные функции отказавшего ГИВУС за счёт работающих систем КМХ и температурных параметров на освещённой поверхности АКА.
На основе построения информационной модели кластера (9) был реализован метод образно-символического управления сложными процессами на борту АКА для поддержания орбитальной ориентации без применения измерителя вектора угловой скорости. Метод относительно просто реализуется, так как базируется на использовании только процессов, протекающих на борту АКА. Основной недостаток метода заключается в низкой точности прогноза ввиду суточно-сезонных изменений температур на поверхности аппарата. Выявленные функциональные зависимости углов отклонения АКА от температур и обратные зависимости необходимо постоянно уточнять путём коррекции ориентации с использованием БОКЗ.
Отклонения АКА от заданной ориентации обуславливали изменения уровня сигналов (мощности) dB (Вт), а также изменения отношения мощности сигнала (дБ) к мощности шумов dUq в наземных измерительных станциях (ИС БРК) пользователей q-ми стволами спутниковой связи [9, 13]. Это привело к мысли ввести в информационную модель кластера KL1 (10) параметри-→ ческую зависимость f7–1, базирующуюся на множестве параметров
MQ = MQ 1 ∪ MQ 2 ∪ MQ 3 = { dUq 1 , q = 1, …, Q 1 } ∪
∪ {dUq2, q = 1, …, Q2} ∪ {dUq3, q = 1, …, Q3}, для коррекции углового положения связанного базиса аппарата в ОСК с использованием зависимостей углов ориентации от уровней сигналов d→U(t) = (dU1(t), dU2(t), …, dUq(t))T;
d →ϕ( t ) = ( d ϕ ( t ), d ϕ ( t ), d ϕ ( t )) T = xyz
→
= K 7 f 2 –1 ( M Q 1 , M Q 2 , M Q 3 ) T .
Указанные параметрические зависимости экспериментально подтверждались в начальной стадии полёта АКА «Ямал» при проведении тестовых проверок наземного оборудования ИС БРК [10]. Д → ля этого производилось измерение dU ( t ) на всех приёмных станциях в зоне их обслуживания бортовым ретрансляционным комплексом при поочерёдном двухстороннем отклонении аппарата от ОСК по каждому каналу управления.
В результате в образно-символическом пространстве управления сложным процессом полёта АКА была построена информационная модель МКL 2 кластера сложного процесса ( KL 2 ), дополненная подмножествами измеренных уровней мощности сигналов на ИС БРК спутниковой связи
М KL 2 ⇔ {ω 0 , J , М Г , М М , М С , H x , H y , H z ,
MT 1 , MT 2 , MT 3 , MQ 1 , MQ 2 , MQ 3 }. (10)
Коэффициенты функциональности отображений перечисленных процессов f 4 –1 , f 1 –1 и f 7 –1 в кластере (10) составили в режиме ОСКП, соответственно, K 4 ≈ 0,7; K 1 ≈ 0,1 и K 7 ≈ 0,2. →
Отображение f5–1 используется при разработке метода построения СО по току СБ в случае аномальных ситуаций с потерей ориентации в ОСК [7]. Метод разработан для обеспечения живучести АКА в экстремальных полётных ситуациях, когда измерения от других перечисленных «датчиков внешней информации» отсутствуют или недостоверны. Одна из таких ситуаций связана с периодом высокой активности Солнца. Большая интенсивность потоков протонов и электронов высоких энергий оказывает сильное возмущающее воздействие на сложные процессы, которые отображены информационными моделями кластеров МKL1, МKL2. Резко падает точность прогноза измен→ений вектора кинетического момента H(t), так как магнитные моменты и моменты, вызванные действием сил светового давления, существенно отличаются от значений, вычисленных для периодов обычного состояния Солнца. Происходит затухание и искажение радиосигналов при прохождении через ионосферу и атмосферу [13], а также «засветка матриц ПЗС» БОКЗ и БОКЦ.
В начале управления СБ разворачивают вокруг оси симметрии связанного базиса ОZ [12] в противоположных направлениях на углы ϕ СБ1 и ϕ СБ2 . Освещённость СБ пропорциональна косинусу угла между нормалями → n 1 , → n 2 к рабочим поверхностям и единичным вектором → e C направления на Солнце. Значения косинусов определяют через отношения текущих измеренных значений токов СБ1,2 I 1 , I 2 к максимальным значениям I 1max , I 2max , соответствующим ориентации СБ на Солнце. Для обеспечения поиска Солнца и приведения вектора → e C в одну из плоскостей, образованных осью симметрии АKA OZ и одной из осей связанной системы координат ССК ( ОХ или OY ), например, плоскость OXZ , осуществляется одновременное вращение аппарата вокруг начального (на → момент потери ориентации) вектора G 0 = ( GОX , GОY , GОZ ) Т с угловой скоростью прецессии, и вокруг продольной оси с угловой скоростью собственного вращения →ω с . Для выбора направления собственного вращения в сторону освещённой части корпуса АКА используются температурные параметры T ( t ). Управление угловым движением ведёт-с → я постоянно с использованием КМХ H ( t ) = ( Hx, Hy, Hz ) Т путём перераспределения кинетического момента между маховиками и корпусом АКА. Таким образом, для построения алгоритма используется информационная модель кластера
МKL 3 ⇔ { I 1 , I 1max , I 2 , I 2max , Hx , Hy , Hz ,
G G ОX , ОY ,
→ G ОZ , Т },
Как следует из модели (11), кроме отображения f5–1 используются информационные модели с использованием →→ отображений f1–1 и f4–1 с коэффициентами функциональности K5 ≈ 0,85; K1 ≈ 0,05 и K4 ≈ 0,15.
По итогам оценки результатов наблюдений для решения задач ориентации аппарата составлена табл. 1 коэффициентов функциональности ( K 1 , ..., K 7 ).
Таблица 1
Коэффициенты функциональности устройств, задействованных для выполнения функции измерителя приращений углов поворота аппарата в режиме ориентации
|
Режимы ориентациии/ коэффициенты функциональности |
Отображения процессов |
||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
ОСК |
— |
1 |
0,67 |
— |
— |
0,33 |
— |
|
ОСКП |
0,10 |
1 |
0,67 |
0,70 |
— |
0,33 |
0,20 |
|
СО |
0,05 |
1 |
— |
0,15 |
0,85 |
— |
— |
Таким образом, показана и доказана на практике реализуемость всех режимов ориентации АКА ГСС «Ямал-200» при отказе измерителя углового положения в пространстве ГИВУС за счёт синергетических информационных ресурсов.
Построение нечёткого графа ресурсного обеспечения режимов ориентации аппарата
При отказе ГИВУС производится оценка оставшегося ресурса дву~х БОКЗ по продолжительн~ости работы Δ P Σρ и числу включений Δ P Σ z . Режимы построения орбитальной и солнечной ориентации используются только в исключительных случаях при аномальных ситуациях, приводящих к потере изначально построенной ориентации. Расход ресурсов БОКЗ связан с режимом ОСКП.
Как видно из табл. 1, возможны три варианта выполнения режима ОСКП:
-
• постоянное использование БОКЗ в качестве измерителя углов расхождения приборного и связанного базисов по трём осям ориентации (первый вариант — БОКЗ);
-
• поддержание местной вертикали по каналам крена и тангажа с использованием БОКЦ путём определения углового рассогласования между приборным и связанным базисами по двум указанным каналам и управления по каналу рыскания с использованием сигнала бортового РМ и наземного его радиопеленгатора (РП у ) за счёт определения угла рассогласования между плоскостью поляризации принимаемого РП у сигнала и углом поворота АКА по рысканию взаимосвязанным через угловое позиционирование РМ в связанном базисе (второй вариант — БОКЦ + РП у );
-
• поддержание ориентации по трём осям с использованием в качестве закона управления АКА прогнозируемых изменений кинетического момента в КМХ с обратной связью подтверждения точности ориентации по термодатчикам на поверхности аппарата и допустимым изменениям уровня сигналов на ИС БРК спутниковой связи (третий вариант — КМХ + ТД + ИС).
Однако второй и третий варианты требуют периодического включения БОКЗ на фоне работы остальных устройств для коррекции БИНС. Продолжительность одной коррекции зависит от многих факторов, определяющим из которых является величина углового рассогласования (угловой ошибки) между приборным и связанным базисами БИНС. При этом существует пороговое ограничение на проведение коррекции (20 мин) [2, 9]. В реальном полёте АКА «Ямал» продолжительность коррекции БИНС находилась в пределах 5…15 мин. Общая продолжительность работы БОКЗ зависит от числа их включений. Например, в зависимости от точности прогноза изменений вектора кинетического момента при формировании закона управления, включение БОКЗ для коррекции осуществлялось от трёх до пяти часов в сутки. При этом по результатам сравнения прогнозируемых значений с измеренными вносились расчётные поправки, которые были неизбежны с учётом изменения внешних и внутренних факторов, оказывающих влияние на прогноз. Таким образом, путём анализа устанавливались причины ошибок отображения процессов, задействованных в управлении. Например, из-за затухания сигнала в постоянно изменяющейся атмосфере не всегда удаётся получить требуемую точность измерения угла поворота АКА по рысканию. Наибольшее влияние на процесс в таких случаях оказывают осадки в виде дождя и снега [9].
При планировании второго и третьего вариантов поддержания ОСК необходимо минимизировать продолжительность работы БОКЗ. При этом второй вариант является приоритетным с точки зрения количества включений БОКЗ для коррекции БИНС. Однако, поддержание орбитальной ориентации только с использованием БОКЦ и РП невозможно по нескольким причинам:
-
• ограниченность ресурса БОКЦ по продолжительности работы;
-
• ограничения на непрерывность работы БОКЦ и РП;
-
• наличие теневых участков орбиты в периоды осеннего и весеннего равноденствий;
-
• проведение периодических регламентных работ на наземных средствах приёма радиосигнала от РП и др.
При этом требования по ограничению расхода ресурсов БА и наземных средств, задействованных для управления в третьем варианте поддержания ОСК, не предъявляются.
Таким образом, необходимо дополнительно для поддержания ориентации планировать третий вариант с проактивным управлением движением аппарата относительно центра масс на основе прогноза изменений суммарного вектора кинетического момента. В случае такой необходимости минимизируется продолжительность работы БОКЗ для коррекции БИНС на интервале использования второго и третьего вариантов поддержания ориентации с учётом полученной апостериорной текущей информации по результатам проведённых коррекций. Для этого при проактивном управлении режимами ориентации используется аналоговое моделирование. При этом вводится допущение: факторы, влияющие на процесс управления на предстоящем интервале, не будут кардинально изменяться по сравнению с предыдущим интервалом. Расхождения между приборным и связанным базисами могут быть скорректированы уменьшением скорости роста угловой ошибки для увеличения продолжительности интервала между коррекциями БИНС. Как показали статистические наблюдения, при относительном постоянстве факторов космического пространства продолжительность работы каждого датчика БОКЗ изменяется от коррекции к коррекции незначительно. Изменения не носят скачкообразного характера. Для анализа выбираются следующие временные оценки продолжительности: d τ — интервала полёта; d τ 1 , d τ 2 , d τ 3 , d τ 4 , d τ 6 , d τ 7 — интервалов функционирования устройств в режиме ОСКП; d τ 2 1 , d τ 2 3 , d τ 2 4 , d τ 2 6 , d τ 2 7 — интервалов включения БОКЗ для коррекции БИНС.
Непосредственный анализ предлагается проводить с использованием нечёткого графа информационных взаимосвязей процессов на борту АКА в режиме поддержания орбитальной ориентации, представленного на рис. 2.
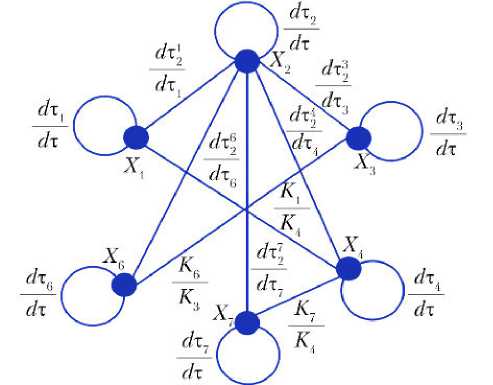
Рис. 2. Общий вид нечёткого графа информационных взаимосвязей процессов на борту АКА ГСС «Ямал-200» в режиме поддержания орбитальной ориентации
Вершины графа X1, ..., X4, X6, X7 соответствуют рассматриваемым процессам, а соединяющие их дуги взвешены коэффициентами расхода ресурса «продолжительности работы» материальных ОУ носителей отображённых процессов. При этом процесс X5 в режиме поддержания орбитальной ориентации не задействован. Следует отметить, что дуги между вершиной X2 и остальными вершинами взвешены коэффициентами продолжительности коррекции БИНС с использованием БОКЗ в рассмотренных вариантах отображения процессов. Дуги между смежными вершинами взвешены коэффициентами, определяющими «относительный вклад» в погрешность ориентации через коэффициенты функциональности (K1, ..., K7) (табл. 1). Кроме того, исходя из предпосылки, что каждый параметр в алгоритме поддержания ориентации имеет свою погрешность, то — чем больше параметров, тем больше погрешность в отображении процесса. Например, вершины X3 и X6 соответствуют процессам, отображаемым в БОКЦ и РПу (второй вариант поддержания ОСК). БОКЦ вносит погрешность по двум основным параметрам — определение углов ориентации АКА по каналам крена и тангажа (ϕx и ϕz); РПу — по одному каналу рыскания ϕу. Дуга между верш∩инами X3 и X6 взвешена коэффициентом K3,6 = K6/K3 ≈ 0,5. При этом в знаменателе находится коэффициент функциональности, который вносит большую погрешность в отображение процесса поддержания ОСК.
Транзитивное замыкание нечёткого отношения процессов на борту автоматического космического аппарата при угловом движении
С использованием полученной апостериорной информации и операции транзитивного замыкания нечёткого графа на рис. 2 определим опосредованное влияние рассматриваемых процессов на погрешности поддержания ориентации АКА. В соответствии с данными табл. 2 проводится расчётный эксперимент.
Таблица 2
Временные интервалы продолжительности функционирования устройств
|
Интервал |
Длительность, ч |
|
d τ |
100 |
|
d τ 1 |
60 |
|
d τ 2 |
15 |
|
d τ 3 |
40 |
|
d τ 4 |
60 |
|
d τ 6 |
40 |
|
d τ 7 |
60 |
|
d τ 2 1 |
10 |
|
d τ 2 3 |
5 |
|
d τ 2 4 |
10 |
|
d τ 2 6 |
5 |
|
d τ 2 7 |
10 |
Расчётный граф представлен на рис. 3.
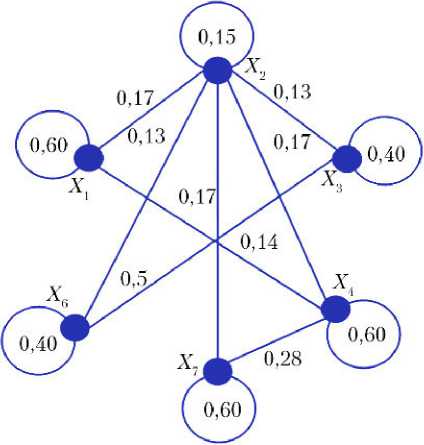
Рис. 3. Взвешенный нечёткий граф отношения процессов на борту АКА ГСС «Ямал-200» в режиме поддержания орбитальной ориентации
Начальная матрица нечёткого отношения процессов на борту АКА ГСС «Ямал-200» в режиме поддержания орбитальной ориентации имеет следующий вид
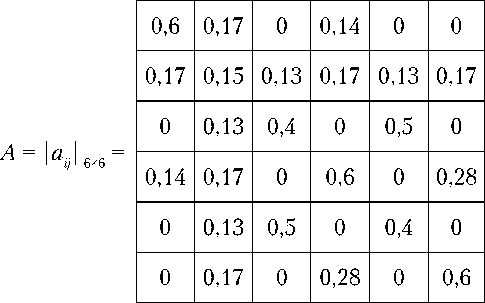
Элементы данной матрицы отражают непосредственное влияние рассматриваемых процессов на погрешности поддержания ориентации АКА. Для определения опосредованного влияния процессов требуется определить транзитивное замыкание данного отношения. Транзитивным замыканием нечёткого отношения [14] называется нечёткое отношение, матрица смежности которого определяется по формуле ^^^^^^^^^
A = A⊕A(2)⊕…⊕A(5)⊕A(6), где A(2) = A⊗A, A(3) = A(2)⊗A и т. д., операция ⊗ осуществляется по максиминному правилу умножения матриц (например, A(3) = A(2)⊗A ⇔ ∀(i, j)(a (3) = max {min{a (2), a }})), ij k∈{1,2,…,6} ik kj а операция ⊕ осуществляется по следующему правилу максимума
^^^^^^^^^
A = A ⊕ A (2) ⊕ … ⊕ A (5) ⊕ A (6) ⇔
⇔∀ ( i , j )( aij = max{ aij , ai ( j 2) , ..., ai ( j 6) }).
Другими словами, для каждого пути различной длины опосредованного влияния процессов друг на друга через промежуточные процессы определяется степень принадлежности этого пути (по правилу минимума), которая может интерпретироваться как гарантированная степень опосредованного влияния на погрешности поддержания ориентации АКА одного процесса на другой по данному пути. Далее максимальная из степеней опосредованного влияния по путям различной длины принимается в качестве интегральной характеристики влияния рассматриваемых процессов на погрешности поддержания ориентации АКА.
Матрица смежности транзитивного замыкания рассматриваемого нечёткого отношения имеет следующий вид:
|
A = || aij || 6×6 = |
0,6 |
0,17 |
0,13 |
0,17 |
0,13 |
0,17 |
|
0,17 |
0,17 |
0,13 |
0,17 |
0,13 |
0,17 |
|
|
0,13 |
0,13 |
0,5 |
0,13 |
0,5 |
0,13 |
|
|
0,17 |
0,17 |
0,13 |
0,6 |
0,13 |
0,28 |
|
|
0,13 |
0,13 |
0,5 |
0,13 |
0,5 |
0,13 |
|
|
0,17 |
0,17 |
0,13 |
0,28 |
0,13 |
0,6 |
Граф транзитивного замыкания нечёткого отношения процессов на борту АКА ГСС «Ямал-200» в режиме поддержания орбитальной ориентации приведён на рис. 4.
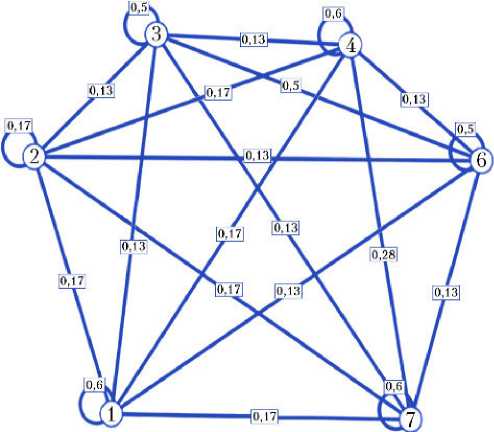
Рис. 4. Нечёткий граф транзитивного замыкания отношения процессов на борту АКА ГСС «Ямал-200» в режиме поддержания орбитальной ориентации
Максимальное число шагов математического моделирования равно n — числу вершин графа.
Шаг 1
|
0,6 |
0,17 |
0,13 |
0,17 |
0,13 |
0,17 |
|
0,17 |
0,17 |
0,13 |
0,17 |
0,13 |
0,17 |
|
0,13 |
0,13 |
0,5 |
0,13 |
0,4 |
0,13 |
|
0,17 |
0,17 |
0,13 |
0,6 |
0,13 |
0,28 |
|
0,13 |
0,13 |
0,4 |
0,13 |
0,5 |
0,13 |
|
0,17 |
0,17 |
0,13 |
0,28 |
0,13 |
0,6 |
|
Шаг 2 |
0,6 |
0,17 |
0,13 |
0,17 |
0,13 |
0,17 |
|
0,17 |
0,17 |
0,13 |
0,17 |
0,13 |
0,17 |
|
|
0,13 |
0,13 |
0,4 |
0,13 |
0,5 |
0,13 |
|
|
0,17 |
0,17 |
0,13 |
0,6 |
0,13 |
0,28 |
|
|
0,13 |
0,13 |
0,5 |
0,13 |
0,4 |
0,13 |
|
|
0,17 |
0,17 |
0,13 |
0,28 |
0,13 |
0,6 |
|
|
Шаг 3 |
0,6 |
0,17 |
0,13 |
0,17 |
0,13 |
0,17 |
|
0,17 |
0,17 |
0,13 |
0,17 |
0,13 |
0,17 |
|
|
0,13 |
0,13 |
0,4 |
0,13 |
0,4 |
0,13 |
|
|
0,17 |
0,17 |
0,13 |
0,6 |
0,13 |
0,28 |
|
|
0,13 |
0,13 |
0,4 |
0,13 |
0,5 |
0,13 |
|
|
0,17 |
0,17 |
0,13 |
0,28 |
0,13 |
0,6 |
|
|
Шаг 4 |
0,6 |
0,17 |
0,13 |
0,17 |
0,13 |
0,17 |
|
0,17 |
0,17 |
0,13 |
0,17 |
0,13 |
0,17 |
|
|
0,13 |
0,13 |
0,4 |
0,13 |
0,5 |
0,13 |
|
|
0,17 |
0,17 |
0,13 |
0,6 |
0,13 |
0,28 |
|
|
0,13 |
0,13 |
0,5 |
0,13 |
0,4 |
0,13 |
|
|
0,17 |
0,17 |
0,13 |
0,28 |
0,13 |
0,6 |
|
|
Шаг 5 |
0,6 |
0,17 |
0,13 |
0,17 |
0,13 |
0,17 |
|
0,17 |
0,17 |
0,13 |
0,17 |
0,13 |
0,17 |
|
|
0,13 |
0,13 |
0,5 |
0,13 |
0,4 |
0,13 |
|
|
0,17 |
0,17 |
0,13 |
0,6 |
0,13 |
0,28 |
|
|
0,13 |
0,13 |
0,4 |
0,13 |
0,5 |
0,13 |
|
|
0,17 |
0,17 |
0,13 |
0,28 |
0,13 |
0,6 |
|
Шаг 6
|
0,6 |
0,17 |
0,13 |
0,17 |
0,13 |
0,17 |
|
0,17 |
0,17 |
0,13 |
0,17 |
0,13 |
0,17 |
|
0,13 |
0,13 |
0,4 |
0,13 |
0,5 |
0,13 |
|
0,17 |
0,17 |
0,13 |
0,6 |
0,13 |
0,28 |
|
0,13 |
0,13 |
0,5 |
0,13 |
0,4 |
0,13 |
|
0,17 |
0,17 |
0,13 |
0,28 |
0,13 |
0,6 |
Как видно из моделирования, на каждом шаге изменяются в одну или другую сторону элементы (3, 3); (3, 5); (5, 3); (5, 5), а через шаг матрицы совпадают. Процесс транзитивного замыкания можно завершить раньше, если вновь образованная матрица будет равна предыдущей [14]. В данном случае — на третьем шаге.
Влияние одних вершин первоначального графа на другие, определяемое через суммарные значения коэффициентов расхода ресурсов, расположенных в столбцах матрицы, представлено в табл. 3 и 4.
Таблица 3
Исходные весовые коэффициенты влияния вершин нечёткого графа в отношениях процессов на борту АКА ГСС «Ямал-200» при поддержании ориентации в ОСК
|
№ вершины графа |
Весовые коэффициенты исходные/ нормированные |
|
|
Х 1 = |
0,91 |
0,764706 |
|
Х 2 = |
0,92 |
0,773109 |
|
Х 3 = |
1,03 |
0,865546 |
|
Х 4 = |
1,19 |
1 |
|
Х 6 = |
1,03 |
0,865546 |
|
Х 7 = |
1,05 |
0,882353 |
Таблица 4
Значения коэффициентов расхода ресурсов после транзитивного замыкания матрицы нечёткого отношения процессов на борту АКА ГСС «Ямал-200» при поддержании ориентации в ОСК
|
№ вершины графа |
Весовые коэффициенты исходные/ нормированные |
|
|
Х 1 = |
1,37 |
0,901316 |
|
Х 2 = |
0,94 |
0,618421 |
|
Х 3 = |
1,52 |
1 |
|
Х 4 = |
1,48 |
0,973684 |
|
Х 6 = |
1,52 |
1 |
|
Х 7 = |
1,48 |
0,973684 |
Как видно из представленных табл. 3 и 4, произошло уменьшение коэффициента в вершине Х2 после учёта опосредованного влияния рассматриваемых процессов на погрешности поддержания ориентации АКА. Физическая интерпретация данного явления, с учётом ранее введённых обозначений, означает уменьшение расхода ресурса в БОКЗ на коррекцию базиса БИНС при поддержании ОСК по второму (БОКЦ + РПу) и третьему вариантам (КМХ + ТД + ИС).
В соответствии с увеличением коэффициента опосредованного влияния на процесс коррекции, соответствующего поддержанию ОСК по второму (БОКЦ + РПу) варианту с 0,865546 до 1 на 100-часовом интервале, время поддержания увеличится с 40,0 до 46,2 ч. Пропорционально этому времени продолжительность работы БОКЗ для коррекции БИНС увеличится с 5,00 ч до ≈ 5,78 ч.
На оставшемся интервале поддержания ориентации по третьему варианту (КМХ + ТД + ИС) продолжительностью 53,8 ч время задействования БОКЗ для коррекции уменьшится и составит ≈8,97 ч. Суммарные затраты времени ресурса БОКЗ составят 14,75 ч против исходных 15 ч.
Уменьшение произошло за счёт изменений в других коэффициентах расхода ресурсов (табл. 4). При этом, как видно из табл. 3 и 4, коэффициент в вершине Х4 неизменно близок к 1, что характеризует «идеальную достижимость» в процессе коррекции БИНС при поддержании ОСК в третьем варианте (КМХ + ТД + ИС) по основному коэффициенту функциональности, определяющему режим (см. табл. 1), т. е. вводится относительная пропорциональ- ная оценка между вторым и третьим вариантами задействования БОКЗ на фиксированном полётном интервале. КМХ несёт на себе основную часть функциональной нагрузки и является определяющим элементом в системе управления движением при поддер- жании ориентации.
Уменьшение ресурсной нагрузки на БОКЗ произошло за счёт увеличения ресурсной нагрузки на БОКЦ и РП У , каждый из которых несёт равную функциональную нагрузку. Если коэффициенты в вершинах Х 3 и Х 6 для первоначальных исходных данных имели значения 0,865546 при ресурсной нагрузке 40 ч (см. табл. 2), то в результате решения задачи учёта опосредованного влияния процессов они имеют значения 1, что соответствует ресурсной нагрузке ≈46,2 ч.
Следовательно, если в программе полёта АКА на 100-часовом интервале последовательно использовать два варианта коррекции БИНС с применением БОКЗ, то для уменьшения на него ресурсной нагрузки по продолжительности работы на ≈0,25 ч необходимо увеличить продолжительность второго варианта поддержания ориентации на ≈6,2 ч.
Заключение
Проведённый в работе системотехнический анализ процессов на борту АКА ГСС «Ямал-200» при отказе измерителя углового положения в пространстве ГИВУС позволил определить возможные варианты выполнения режимов ориентации за счёт существующих информационных синергетических ресурсов.
Согласно результатам проведённого анализа, критичным для управления угловым движением АКА после отказа ГИВУС является суммарный ресурс двух БОКЗ. Для ресурсного обеспечения управления ориентацией АКА формализованы информационные взаимосвязи процессов в виде обобщённого нечёткого графа, дуги которого взвешены коэффициентами расхода ресурса «продолжительности работы» материальных ОУ носителей рассматриваемых процессов. С целью определения возможности уменьшения ресурсной нагрузки по продолжительности работы на БОКЗ и выявления опосредованного (неявного, эмерджентного) влияния рассматриваемых процессов на погрешности поддержания ориентации АКА была проведена операция транзитивного замыкания нечёткого отношения, построенного по апостериорной информации.
Предложен универсальный метод анализа предшествующей апостериорной информации для перераспределения на последующем аналогичном этапе ресурсной нагрузки между двумя вариантами поддержания ориентации (БОКЦ + РП y ) и (КМХ + ТД + ИС) с целью уменьшения ресурсной нагрузки на БОКЗ, обеспечивающий коррекцию БИНС.
Результаты оценки приближённого вычислительного эксперимента показали, что при рациональном применении коррекции БИНС с применением БОКЗ в двух вариантах поддержания ориентации возможно уменьшение ресурсной нагрузки на ≈2%. Указанная величина зависит от реальных факторов, влияющих на расхождение связанного и приборного базисов, приводящих к необходимости проведения их коррекции. Полученная апостериорная информация с предыдущего этапа используется при формировании исходных данных для последующей оценки. Таким образом, происходит постоянное уточнение продолжительности использования каждого варианта поддержания ориентации при планировании программы полёта на типовых интервалах.
Исследования, выполненные по данной тематике, проводились при частичной финансовой поддержке грантов РФФИ (№ 17-29-07073, 18-07-01272, 18-08-01505, 19–08–00989, 20-08-01046), в рамках бюджетной темы № 0073–2019–0004.
Список литературы Методы задействования синергетических информационных ресурсов при управлении угловым движением автоматического космического аппарата
- Микрин Е.А. Бортовые комплексы управления космических аппаратов. М.: Изд-во МГТУ им. Н.Э. Баумана, 2014. 245 с.
- Ковтун В.С. Метод проведения синергетических наблюдений процессов на борту космического аппарата // Приборостроение. 2020. № 11. С. 15-24.
- Ковтун В. С., Почукаев В.Н. Методы образно-символического управления автоматическими космическими аппаратами в условиях аномальных ситуаций // Космонавтика и ракетостроение. 2017. № 6(99). C. 61-74.
- Микони С.В., Соколов Б.В., Юсупов Р.М. Квалиметрия моделей и полимодельных комплексов. М.: Изд-во РАН, 2018. 312 с.
- Ковтун В.С. Стратификация сложного процесса управления полётом космического аппарата // Космонавтика и ракетостроение. 2012. № 4. С. 78-88.
- Городецкий А.А., Ковтун В.С., Лобанов В.Б, Наумов С.Ф., Свечкин В.П. Исследование термооптических характеристик терморегулирующих покрытий в условиях космического полёта на геостационарной орбите // Известия РАН. Энергетика. 2007. № 3. С. 123-133.
- Платонов В.Н. О возможности длительного поддержания ориентации геостационарного спутника без использования датчиков внешней информации и инерциальных датчиков / / Космические исследования. 2009. Т. 47. № 3. С. 263-270.
- Патент ЬШ 2614467 С1. Российская Федерация. Способ формирования управляющих воздействий на космический аппарат с силовыми гироскопами и поворотными солнечными батареями. Платонов В.Н., Орловский И.В., Фролов И.В., Ковтун В.С., Ефимов Д.А.; патентообладатель — ОАО РКК «Энергия»; заявка 2015146375 от 27.10.2015 г. // Изобретения. 2017. № 10.
- Патент ЬШ 2354590 С2. Российская Федерация. Способ управления ориентацией геостационарного космического аппарата, оснащённого радиомаяком. Севастьянов Н.Н., Верхотуров В.И., Орлов А.Г., Блинов В.А., Ков-тун В.С., Платонов В.Н., Орловский И.В.; патентообладатель — ОАО РКК «Энергия»; заявка 2006132148/11 от 06.09.2006 г. // Изобретения. 2009. № 13.
- Патент ЬШ 2191721 С1. Российская Федерация. Способ управления ориентацией космического аппарата, снабжённого бортовым радиотехническим комплексом. Ковтун В.С., Банит Ю.Р.; заявитель и патентообладатель — ОАО РКК «Энергия»; заявка 2001103403/28 от 05.02.2001 г. // Изобретения. 2002. № 30.
- Патент ЬШ 2341419 С2. Российская Федерация. Способ поддержания трёхосной ориентации космического аппарата с силовыми гироскопами и целевой нагрузкой. Банит Ю.Р., Ковтун В.С., Беляев М.Ю., Платонов В.Н.; патентообладатель — ОАО РКК «Энергия»; заявка 2006122563/11 от 23.06.2006 г. // Изобретения. 2008. № 35.
- Патент ЬШ 2264954 С2. Российская Федерация. Космический аппарат с регулярной ориентацией относительно Солнца. Земсков Е.Ф., Ковтун В.С., Сур-гучёв О.В., Носкин Г.В., Лобанов В.Н., Вовк А.В.; патентообладатель — ОАО РКК «Энергия»; заявка 2003119979/11 от 01.07.2003 г. // Изобретения. 2005. № 33.
- Спутниковая связь и вещание. Справочник / Под ред. Л.Я. Кантора. М.: Радио и связь, 1997. 521 с.
- Резников Б.А. Системный анализ и методы системотехники. Ч. 1. Методология системных исследований. Моделирование сложных систем. Л.: МО СССР, 1990. 241 с.
