Mexbios - среда разработки современных систем управления электроприводов

Автор: Гусев Николай Владимирович, Кладиев Сергей Николаевич, Родионов Георгий Владимирович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 3 т.15, 2015 года.
Бесплатный доступ
Рассмотрен принцип построения и функционирования инструментария для разработки и отладки программного обеспечения современных цифровых систем управления высокоточных электроприводов. Сложность освоения и применения языков программирования создаёт дополнительные барьеры перед техническими специалистами при реализации своих идей в области управления сложными электромеханическими объектами. Разработанный программный комплекс MexBIOS обеспечил значительное сокращение сроков разработки электронных модулей управления, получение необходимых внешних характеристик и снижение стоимости микропроцессорных систем управления электроприводов. Программный комплекс представляет собой интегрированную среду автоматизированного проектирования с возможностью отладки и настройки цифровых систем управления электроприводами. Если первые версии MexBIOS обеспечивали разработку микропроцессорных систем управления электроприводов в режиме реального времени и программы, полученные средствами MexBIOS, имели достаточно громоздкий вид, то для обеспечения наглядности и компактности схем была выработана новая концепция создания структуры программного комплекса. Стало возможно создавать разветвлённые алгоритмы. Впоследствии была реализована возможность в процессе анализа синтезируемого программного обеспечения, выделить различные состояния объекта управления и строго описать действия системы управления в этих состояниях. В настоящее время реализована возможность изменения программного обеспечения без остановки выполнения программы для изменения структуры программы управления, не останавливая технологический процесс. Получены аналитические соотношения и определена методика синтеза векторной системы управления частотно-регулируемым асинхронным двигателем методом визуального программирования в новой программной среде MexBIOS.
Регулирование электрических машин, программное обеспечение, среда разработки, цифровые системы управления, моделирование систем управления электроприводов
Короткий адрес: https://sciup.org/147158318
IDR: 147158318 | УДК: 621.3.07:004.4-23:004.942 | DOI: 10.14529/power150308
“Mexbios” development environment for modern control systems of electric drives
In the paper the principle of design and implementation of tools for developing and debugging the software of modern digital control systems of high-accuracy electric drives has been considered. Difficulty of learning and implementing the programming languages puts additional barrier for technical specialists, who are realising new ideas in field of control systems for complex electromechanical objects. Ready-to-use software complex MexBIOS provides significant reduction in time-to-market of electronic control units, achievement of required load characteristics and cost decrease of microprocessor control systems for electric drives. The software complex is an integrated environment of computer-aided design with ability to debug and adjust digital control systems for electric drives. Earliest versions of MexBIOS enable development of microprocessor control systems for electric drives in real-time mode, but programs, which have been developed by means of MexBIOS, were cumbersome. To provide visualisation and ease of understanding of the program flow a new concept of the designing the structure of the software complex have been elaborated. Now it is possible to implement complex algorithms. In late versions a new feature of state-flow programming has been added, i.e. of choosing separate states of the object and describing rigorously the control system actions in terms of these states. At present the program code can be modified without stopping the program run in order to modify the program structure of the control system without stop of the manufacturing process. The analytical relations and the synthesis procedure of vector control system for variable-frequency induction motor by visual programming method in new software environment MexBIOS have been developed.
Текст научной статьи Mexbios - среда разработки современных систем управления электроприводов
Специализированное программное обеспечение (ПО) развивалось параллельно развитию микроконтроллеров и первоначально основывалось на языках низкого уровня типа Assembler , что требовало высокой профессиональной подготовки программистов. Развитие объектно-ориентированных языков программирования незначительно облегчило процесс создания программ управления для систем автоматического регулирования на базе исполнительных электроприводов. Таким образом, появилась необходимость в создании нового инструмента для разработки и отладки ПО современных систем управления электроприводов.
В настоящее время прослеживается тенденция опережающего развития ПО цифровых микропроцессорных систем управления (МПСУ) электроприводов при достаточно высоком уровне их аппаратной части, реализованной на микроконтроллерах. До 90 % функций управления в современных системах электроприводов обеспечивается за счет программного обеспечения. Именно поэтому данное направление исследований является актуальным.
Существующие программные комплексы MatLab Simulink, Vissim позволяют сгенерировать программный код для микроконтроллера, однако обладают рядом недостатков: дополнительно тре- буется система программирования, невозможно проводить отладку кода и настройку системы управления непосредственно из автоматизированной системы проектирования встроенного ПО микроконтроллера [1–2].
В лаборатории микропроцессорных систем управления электроприводами кафедры электропривода и электрооборудования Энергетического института Томского политехнического университета был проведен ряд исследований, основной целью которых было создание встроенных МПСУ современных высокоточных электроприводов. Основная задача таких систем обеспечить: значительное сокращение сроков разработки электронных модулей управления (преобразователей частоты для систем управления электродвигателями, сервоприводов, контроллеров); гарантированное получения в системе электропривода требуемых характеристик; снижения стоимости системы управления [3].
Разработанный программный комплекс MexBIOS™ Development Studio 2.15 (MexBIOS) в настоящее время применяется в научно-внедренческой деятельности Томского политехнического университета и используется несколькими вузами в учебном процессе для освоения принципов построения цифровых систем управления. Программный комплекс представляет собой интегри-
Электромеханические системы рованную среду автоматизированного проектирования с возможностью отладки и настройки цифровых систем управления электроприводами. К программному комплексу прилагаются файлы прошивок для наиболее распространенных типов микроконтроллеров, применяемых при создании устройств управления [4].Основной функционал первых версии MexBIOS –разработка МПСУ для управления электроприводом в режиме реального времени. Однако программа, полученная средствами MexBIOS, не обладала наглядностью и имела достаточно громоздкий вид [5].
Для наглядности и компактности схем, была выработана новая концепция создания структуры создаваемого ПО. Стало возможно создавать разветвлённые алгоритмы. Далее разработчики реализовали популярный метод программирования – машина состояний. Благодаря этому методу стало возможным в процессе анализа будущего ПО выделить различные состояния объекта управления и строго описать действия системы управления в этих состояниях. Сейчас разработчики реализуют функцию изменения ПО, не останавливая выполнения программы. Данный подход позволяет изменять структуру программы управления без остановки технологического процесса [6, 7].
Создание цифровых систем управления реального времени для управления электромеханическими объектами является сложной задачей, решение которой требует применение специальных методов и программно-аппаратных средств. Объём решаемых задач на программируемых контроллерах многократно усложнил процесс создания встроенного программного обеспечения для новых решений в области разработки цифровых систем управления автоматизированных электроприводов. Зачастую приходится прибегать к це- почке специалистов: от специалиста предметной области до программиста специализированных контроллеров. Такой подход приводит к удорожанию процесса разработки нового устройства как из-за увеличения времени разработки, так и из-за возникающих ошибок в процессе реализации идеи специалиста программистом в конечном продукте. Набирает оборот новое направление программирования – с помощью визуальных блок-схем. Данных подход позволяет исключить промежуточного специалиста в программировании между инженером и программой [4].
Цель данной статьи – показать возможность синтеза векторной системы управления частотнорегулируемым асинхронным двигателем методом визуального программирования в новой программной среде MexBIOS.
Синтез контура регулирования тока
Первый этап программирования – создание адекватной модели объекта регулирования: питающей сети трёхфазного напряжения и асинхронного двигателя марки АИР71А4. Модель двигателя представлена в двухфазной неподвижной системе координат относительно осей α и β. На рис. 1 представлена функциональная схема, собранная в интегрированной программной среде, и представлен график имитационного моделирования.
На втором этапе работы необходимо провести отладку модели замкнутой системы управления током статора асинхронного двигателя.
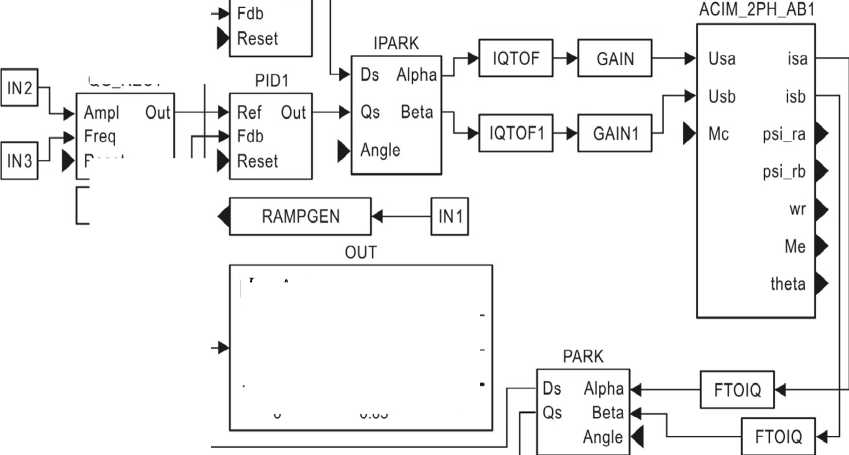
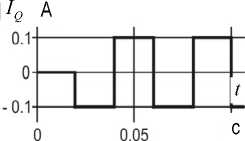
Для отладки контура регулирования тока необходимо отключить механическую часть электродвигателя (застопорить вал). На рис. 2 представлен результат имитационного моделирования контура управления током статора по оси Q .
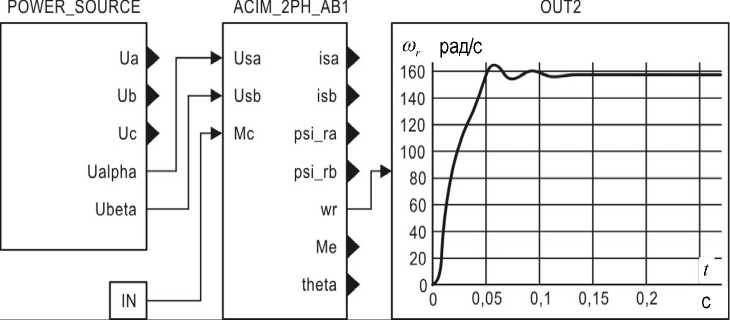
Рис. 1. Модель объекта регулирования:
POWER_SOURCE – блок имитационной модели трёхфазного симметричного источника напряжения (Ua, Ub, Uc) и идеального двухфазного источника напряжения в неподвижной системе координат (Ualpha, Ubeta); ACIM_2PH_AB1 – имитационная модель двухфазного асинхронного двигателя; isa, isb – составляющие вектора тока статора; psi_ra, psi_rb – составляющие вектора потокосцепления ротора; wr – частота вращения ротора; Me – электромагнитный момент; theta – угол поворота вектора потокосцепления ротора; OUT2 – графический визуализатор, отображающий результат моделирования прямого пуска двигателя в рад/с; IN – задание момента нагрузки в Н·м
PID
IN
Ref Out —1
QG RECT
Reset
1.00026 *
Рис. 2. Имитационная модель системы управления током АД:
QG_RECT – генератор прямоугольных импульсов; Ampl – амплитуда сигнала; Freq – частота сигнала; Reset – на всех блоках вход сигнала сброса; Out – выход генератора; IN2, IN3 – задание амплитуды и частоты генератора прямоугольных импульсов; PID, PID1 – ПИД регуляторы составляющих тока статора по осям D и Q; Ref, Fdb – входы сигналов задания и обратной связи ПИД-регуляторов составляющих тока статора; IPARK, PARK – блоки инверсного и прямого преобразования Парка–Горева; Ds, Qs – составляющие вектора тока статора во вращающейся системе координат; Alpha, Beta – составляющие вектора тока статора в неподвижной системе координат; Angle – угол поворота координатной системы; RAMPGEN – генератор пилообразного сигнала для принудительного ориентирования координатной системы; FTOIQ, IQTOF – преобразователи форматов сигналов; GAIN – блок усиления сигнала; OUT – графический визуализатор полученных переходных процессов по току по оси Q
Для регулирования частоты вращения АД в зоне с постоянством момента, необходимо изменять активную составляющую вектора тока статора двигателя. Создание системы векторного управления АД базируется на общеизвестных уравнениях математического описания работы АД во вращающейся системе координат, ориентированной по вектору потокосцепления статора.
При отсутствии датчиков потокосцепления асинхронного двигателя необходимо вычислять угол поворота координатной системы. Вычисление угла поворота производится по токовой модели (модель ротора).
Подключение токовой модели ротора
Токовая модель ротора состоит из следующих двух дифференциальных уравнений двигателя во вращающейся системе координат:
di
-
i d=Tr
i ■(1)
-
1 d 9 to
toe =--= — zp +, tob dt tob p Triцюb где 9 - положение ротора; iц - ток намагничивания двигателя; id, iq – d и q составляющие вектора тока статора во вращающейся координатной системе;
T r = L r /Rr - постоянная времени ротора, где L r -индуктивность ротора, R r – сопротивление ротора; to e - угловая частота вращения поля ротора; to b - базовая угловая частота вращения двигателя; to r - угловая частота вращения ротора; zp - число пар полюсов двигателя.
Функция токовой модели CUR_MOD дискретном виде представлена системой уравнений:
i ц ( i ) i ц ( i - 1) + ^ ( id ( i ) i ^ (i - 1) ) ;
T r
-
a, - iq
-
5 to slip T . ;
T ri ц ( i ) to b
-
toe =to r +to slip ;
,9 ( i ) =9 ( i - 1) + Tf b to e ,
где T - период дискретизации; to slip - скольжение ротора; fb – базовая частота питающей сети.
Чтобы по данным уравнениям реализовать функцию управления, необходимо преобразовать уравнения по первой разностной схеме Эйлера и привести их к относительным единицам. Приведённая система уравнений реализована в блоке CUR_MOD. Регулирование скоростью осуществляется с помощью ПИД регулятора [8–10]. Для того чтобы двигатель успел сформировать магнит-
Электромеханические системы ное поле перед запуском, необходимо задержать формирование задания на момент. Задержку осуществляет блок Delay.
На рис. 3 представлена функциональная схема векторной системы управления скоростью АД.
Графические визуализаторы позволяют наблюдать, регистрировать и анализировать результаты имитационного моделирования векторной системы управления АД.
Далее необходимо добавить и настроить блоки драйверов устройств периферии (QEP, PWM, ADC), то есть задать:
-
- тип ШИМ преобразователя;
-
- тактовую частоту ШИМ;
-
- величину «мертвого» времени.
После чего запускается программное обеспечение на контроллере системы управления электропривода, и полученные данные имитационного моделирования сравниваются с экспериментальными данными.
Графики, полученные с функции CUR_MOD и угла поворота координатной системы, ориентированной по вектору потокосцепления ротора, представлены на рис. 4.
Как видно из рис. 4, рассчитанный угол положения и угол положения математической модели двигателя практически совпадают.
Так же можно сравнить и проанализировать графики переходных процессов по току и угловой частоте вращения асинхронного двигателя.
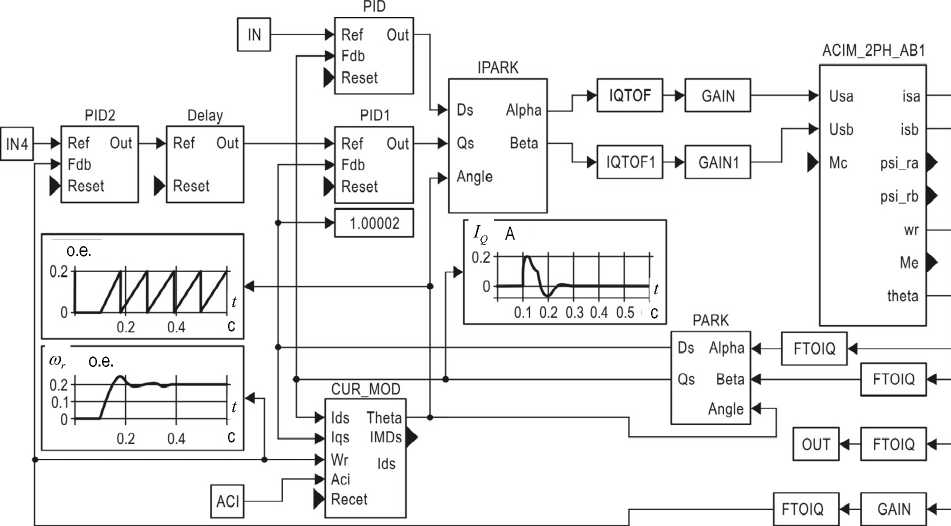
Рис. 3. Модель векторной системы управления скоростью АД. Добавлена функция CUR_MOD: Ids, Iqs – токи статора во вращающейся системе координат; ACI – вход параметров двигателя
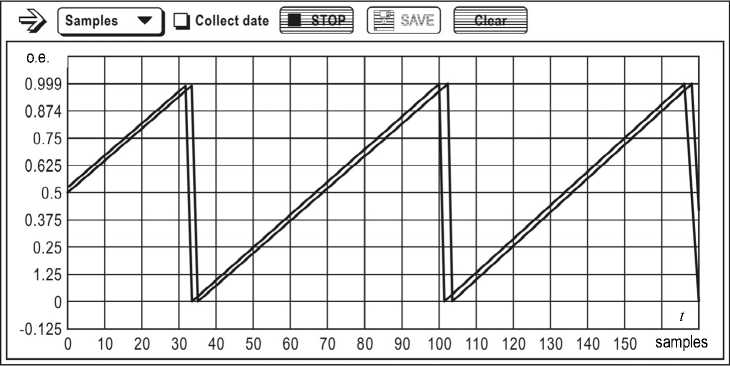
Рис. 4. Угол поворота вектора потокосцепления ротора, полученный при моделировании АД, и вычисленный функцией CUR_MOD в момент реверса
Заключение
Отличительной особенностью данного подхода к синтезу системы векторного управления регулируемого электропривода является применение собственного открытого программного обеспечения MexBIOS.
Для получения требуемых выходных характеристик электропривода, можно менять структуру микропроцессорной системы управления и используя стандартные процедуры оптимизации получать требуемое качество переходных процессов и в короткий срок произвести отладку управляющей программы для микроконтроллеров производства Texas Instruments серии C2000.
Предложенный программный комплекс позволяет проводить проектирование, предварительное имитационное моделирование, загрузку кода в микроконтроллер, отладку встроенного программного обеспечения и настройку регуляторов цифровой системы управления электродвигателем в одном продукте в отличие, например, от Simulink MatLab .
Список литературы Mexbios - среда разработки современных систем управления электроприводов
- Hercog, D. Rapid control prototyping using MATLAB/Simulink and a DSP-based motor controller/D. Hercog, K. Jezernik//International Journal of Engineering Education. -2005. -Vol. 21, no. 4. -P. 596.
- Hercog, D. DSP based rapid control prototyping systems for engineering education and research/D. Hercog, M. Curkovic, K. Jezernik//Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, 2006 IEEE. -IEEE, 2006. -P. 2292-2297.
- Современная технология разработки цифровых систем управления электроприводами/А.С. Каракулов, Н.В. Гусев, Г.В. Родионов, М.В. Сливенко//Известия высших учебных заведений. Электромеханика. -2011. -№ 6 -C. 46-51.
- Начало работы -руководство для новых пользователей//ООО «НПФ Мехатроника-Про»: . -Томск, 2011-2015 -http://www.mechatronica-pro. com/ru/blogs/(дата обращения: 11 марта 2015 г.).
- Каракулов, А.С. MexBIOS -российская программная платформа для разработки цифровых систем управления электроприводами/А.С. Каракулов, Н.В. Гусев//Электроприводы переменного тока: тр. междунар. четырнадцатой науч.-техн. конф. -Екатеринбург: ФГАОУ ВПО «УрФУ им. первого Президента России Б.Н. Ельцина», 2012.-С. 315-318.
- Создание модели векторной системы управления асинхронным двигателем//ООО «НПФ Мехатроника-Про»: . -http://www.mechatronica-pro.com/ru/blogs/(дата обращения: 11 марта 2015 г.).
- Delfino и студия MexBIOS ускоряют разработку промышленных систем//Teрра-электроника: . -Томск, 2011-2015 -https://www.terraelectronica.ru/notes.php?ID=1531 (дата обращения: 11 марта 2015 г.).
- Novotny, D.W. Vector control and dynamics of AC drives/D.W. Novotny, T.A. Lipo. -Oxford: Clarendon Press, 1996. -Vol. 41. -440 p.
- Boldea, I. Vector control of AC drives/I. Bol¬dea, S.A. Nasar. -CRC press, 1992. -228 p.
- Фираго, Б.И. Регулируемые электроприводы переменного тока/Б.И. Фираго, Л.Б. Павлячик. -Минск.: Техноперспектива. -2006. -363 c.
