Микроэлектронные устройства управления силовыми энергопреобразующими модулями систем электропитания перспективных космических аппаратов

Автор: Непомнящий О.В., Краснобаев Ю.В., Титовский С.Н., Хабаров В.А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 2 т.5, 2012 года.
Бесплатный доступ
Рассмотрены основные проблемы в организации устройств управления силовыми модулями энергопреобразующей аппаратуры космических аппаратов. Предложено решение задачи организации интеллектуального модуля управления на базе однокристальной вычислительной системы специального назначения. Изложена архитектура, программный и аппаратный состав, а также результаты наземных испытаний силового модуля с микроэлектронным управлением. Показана достижимость минимальной конечной длительности переходных процессов в силовом модуле при ступенчатом изменении тока нагрузки.
Микропроцессор, электропитание, космический аппарат, бортовой комплекс, алгоритм
Короткий адрес: https://sciup.org/146114638
IDR: 146114638 | УДК: 681.323
Control microelectronic systems for power conditioning of advanced spacecraft
There are considered the major problems of the control unit organization for spacecraft power conditioning system. It is offered a problem solution of intellectual control unit organization based on special purposed system on a chip. The architecture, software and hardware of the microprocessor unit for a digital control circuit implementation are presented. The ground test results of voltage buck regulator are shown. It is shown that the minimal finite duration of transients process in case step change of load current in power module is achievable.
Текст научной статьи Микроэлектронные устройства управления силовыми энергопреобразующими модулями систем электропитания перспективных космических аппаратов
Предварительные исследования [1–3] в области реализации устройств управления (УУ) силовыми модулями (СМ) энергопреобразующей аппаратуры (ЭПА) спутников связи, навигации и геодезии отечественного производства показали, что применение в составе УУ комбинации аналоговых и цифровых элементов малой и средней степени интеграции при большом сроке функционирования не обеспечивает требуемого уровня надежности из-за отказа элементов и дрейфа их параметров, осложняет производство СМ из-за широкой номенклатуры элементов и разброса их параметров, повышает собственное энергопотребление.
Предлагаемые решения в области цифрового управления силовым контуром базируются на узкоспециализированных контроллерах с широтно-импульсной модуляцией (ШИМ-контроллеры) и не позволяют обеспечить выполнение многочисленных функций, реализуемых СМ.
Кроме того, постоянное усложнение УУ практически исключает возможность адаптации законов управления СМ к изменению параметров силовых цепей при длительной эксплуатации и при частичных отказах как в самих СМ, так и в источниках энергии, питающих из.
Для устранения означенных проблем авторами предложено решение задачи управления СМ ЭПА посредством специализированного однокристального микропроцессорного модуля с реконфигурируемой архитектурой, функционирующего согласно оригинальным запатентованным алгоритмам [4]. Модуль реализован в виде радиационно-стойкой системы на кристалле – SoC (System on Chip) с дублированием приоритетных узлов и мажоритарными схемами выходных шин. Внутренняя архитектура и функциональный состав реконфигурируемой системы задаются изначально согласно реализуемым функциям управления, а также потоком входных и выходных данных. Были разработаны [3] однокристальные системы для управления импульсными стабилизаторами напряжения (ИСН) понижающего (ПН) и повышающего (ПВ) типов.
При проектировании микроэлектронных систем управления использовали принцип нисходящего высокоуровневого проектирования ESL (Electronic System Level) с применением функционально-потокового представления исходных алгоритмов. Совместная нераздельная симуляция и компиляция проекта позволили быстро выполнить отладку и верификацию системы без разделения на аппаратную и программную части, а разработанный пакет тестов дал возможность выполнить симуляцию функционирования ядра при помощи прикладной системы моделирования временных показателей ModelSim.
В свою очередь, на нижних уровнях абстракции в представлении проекта условно были выделены две части – аналоговая и цифровая. Такой подход позволил четко распределить выполняемые системой функции: комплект цифровых модулей реализует микропрограммный анализ сигнала и генерацию дискретных управляющих импульсов, а аналоговые модули осуществляют сопряжение с управляемым устройством. Сопряжение между аналоговой и цифровой частью происходит через блок быстродействующего многоканального аналого-цифрового преобразователя (АЦП).
При разработке однокристальной системы управления СМ основными определяющими параметрами для реализации встраиваемых на кристалл цифровых субмодулей являлись:
-
– возможность программной реализации на базе вычислительного ядра всего комплекса математических и логических процедур для УУ СМ без каких-либо изменений в конфигурации оборудования;
-
– наличие высокопроизводительного центрального RISC процессора с тактовой частотой не ниже 32 МГц и периодом выполнения большинства команд в 1–2 такта;
-
– наличие двух каналов АЦП с входными усилителями, имеющими программируемый коэффициент усиления. При этом время аналого-цифрового преобразования не должно превышать 7 мкс, а точность оцифровки должна составлять приблизительно 0,1 %;
-
– наличие восьми 16-разрядных таймеров-счетчиков для измерения временных интервалов и формирования выходных импульсов с погрешностью порядка 30 нс;
-
– наличие встроенной системы коммутации событий, позволяющей на аппаратном уровне транслировать выходные сигналы одних устройств на входы других для исключения неопределенности времени обнаружения сигналов, свойственной программному опросу, и существенного уменьшения объема исполняемого кода программ.
Основной задачей устройства управления служит формирование выходного импульса управления ключом стабилизатора, длительность которого (Тимп) является функцией от входных напряжений:
Тимп, = Тп • (UuHTi - (5 • идиф, -1.5 • иДиф-!)) / Umax, где i - номер такта работы стабилизатора; Тп - длительность такта (период) работы стабилизатора; Umax – условное максимальное напряжение (напряжение, при котором длительность выходного импульса совпадает с периодом); Uuht - напряжение с выхода интегратора, диапазон изменения 0-3 В; идиф - переменная (дифференциальная) составляющая выходного напряжения, изменяющегося для статического режима работы (при неизменном сопротивлении нагрузки), диапазон изменения ±20 мВ.
Функциональный состав специализированного гибридного процессора для управления СМ в одноканальном режиме, реализующий данный закон управления, изображен на рис. 1.
Импульс запуска с контакта C7 через канал событий EvSysO нарастающим фронтом сигнала перезапускает таймер-счетчик TCD1, работающий в режиме захвата частоты. Одновременно канал CCA счетчика фиксирует время, прошедшее с момента предыдущего запуска, т.е. длительность периода запуска Тп , и вызывает прерывание, обработчик которого помещает зафиксированную длительность периода в регистры R30, R31 процессора.
Тот же фронт импульса запуска через канал событий EvSys1 перезапускает таймер-счетчик TCC0, работающий в режиме широтно-импульсной модуляции. Для запуска аналогоцифрового преобразователя ADCA используется канал CCB счетчика, что позволяет задержать момент запуска АЦП по отношению к моменту коммутации ключа силовой части стабилизатора, сопровождающемуся значительными импульсными помехами.
Сигнал с выхода CCB через канал событий EvSys7 запускает АЦП, работающий в двухканальном режиме с одновременной фиксацией данных по всем каналам. По окончании преобразования данных канала Ch0 вызывается прерывание, обработчик которого помещает оцифрованное значение Uинт в регистры процессора R26, R27. После завершения преобразования данных канала Ch1 также вызывается обработчик прерывания, в котором выполняется расчет
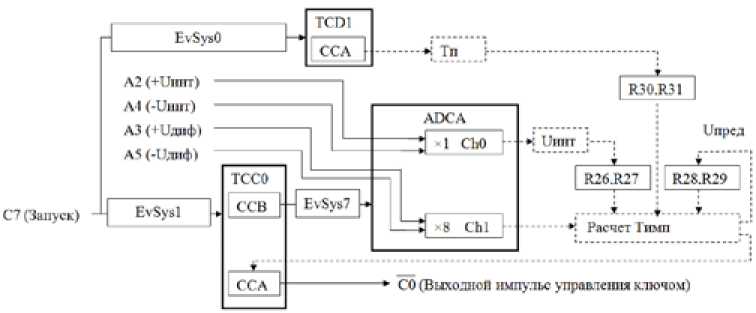
Рис. 1. Функциональный состав и алгоритмическая схема функционирования программного обеспечения УУ СМ
Тимп на основании полученных значений Тп, Uuht , идиф. Поскольку используется 12-раз-рядный АЦП, Umax принято равным 2047. В этом же обработчике вычисляется и помещается в R28, R29 1,5 • идиф (Unped ), которое будет использоваться в расчетах следующего периода запуска.
Разработанная программа для управляющего микропроцессорного ядра содержит инициирующую часть и набор обработчиков прерываний, выполняющих все операции, необходимые для управления стабилизатором.
Описанная реализация устройства управления СМ, силовая часть которого выполнена по схеме конвертора понижающего типа, позволила обеспечить работу СМ на частотах преобразования до 120 КГц, а предварительные испытания показали возможность достижения частоты 300 КГц при условии использования высокоскоростного субмодуля аналого-цифрового преобразования [6].
Для подтверждения правильности разработанных схемотехнических решений, подтверждения параметров переходных процессов и устойчивости по амплитуде и фазе проведены наземные испытания макетно-экспериментальных образцов модулей УУ ИСН понижающего и повышающего типов.
На рис. 2-4 представлены временные диаграммы процессов изменения напряжения на выходе макета, силовая часть которого выполнена по схеме конвертора понижающего типа, работающего с частотой преобразования 120 кГц.
Вход 1 (луч желтого цвета) подключен к датчику тока нагрузки, выполненному в виде резистивного шунта из резистора MF1 – 0,1 Ом.
Вход 2 (луч синего цвета) подключен к выходу датчика тока дросселя.
Вход 3 ЦО (луч красного цвета) подключен к выходу макета ИСН ПН.
В СМ с силовой цепью понижающего типа, имеющей фильтр второго порядка для «малых» приращений длительности импульса управления, т.е. при малых возмущениях, допускающих приведение ИСН с ШИМ к системе с амплитудно-импульсной модуляцией (АИМ), и при наличии интегратора сигнала рассогласования (третий порядок системы), теоретически возможно обеспечить длительность переходного процесса в три периода пре-
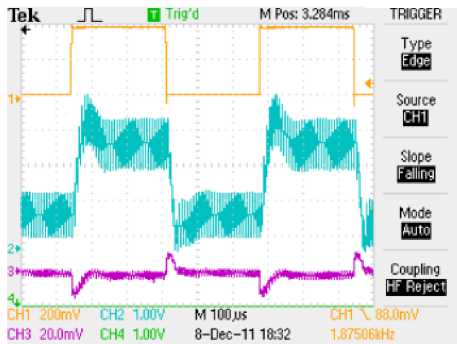
Рис. 2. Коммутация нагрузки (приращение тока нагрузки – 3 А)
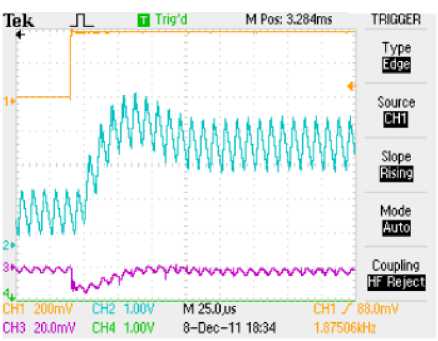
Рис. 3. Коммутация нагрузки (приращение тока нагрузки – 3 А), детально нарастающий фронт
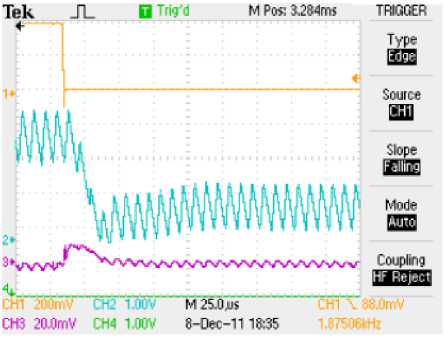
Рис. 4. Коммутация нагрузки (приращение тока нагрузки – 3 А), детально падающий фронт образования. При этом дополнительными условиями являются стабильность параметров элементов силовой цепи СМ и действие возмущения в моменты квантования. Результаты наземных испытаний показали, что в исследуемом СМ эти дополнительные условия не выполняются.
Поскольку приращение импульса управления значительно, индуктивность дросселя при увеличении нагрузки снижается на 10–15 %, емкость конденсатора фильтра зависит от частоты и момент коммутации нагрузки смещен относительно момента квантования. Тем не менее, получена длительность переходного процесса (от момента возмущения до перехода к новому стационарному режиму) в 4–5 периодов преобразования (рис. 3, 4). С учетом оговоренных выше нелинейных свойств силовой цепи СМ это позволяет утверждать, что достигнуты предельно малые временные параметры переходного процесса.
Для определения максимально допустимых характеристик по производительности, энергопотреблению и минимизации площади кристалла на основании проведенных ранее исследований в предметной области [1–3] были разработаны лабораторные макеты УУ СМ – 166 – на базе кристаллов серий Cyclone от компании Altera и радиационно-стойких кристаллов ПЛИС Actel AX2000/RTAX2000 на базе отладочного комплекса Aeroflex Gaisler GR-CPCI-AX LEON3-FT CPCI Board [5, 6].
Заключение
Разработанный и реализованный в виде однокристальной специализированной системы программно-аппаратный комплекс позволяет осуществлять прием и оцифровывание управляющих сигналов с необходимой точностью в режиме реального времени и при наличии электромагнитных помех в жестких условиях эксплуатации на частотах преобразования от 60 до 300 КГц. Он осуществляет обработку информационных сигналов в режиме реального времени и формирование широтно-импульсного сигнала управления электронным ключом СМ в соответствии с алгоритмами, обеспечивающими решение всего комплекса задач управления.
Работа выполнена при финансовой поддержке Федеральной целевой программы «Научные и научно-педагогические кадры инновационной России на 2009-2013 гг. (код проекта 02.740.11.0508)
