Мини-робот как базис развития образовательного процесса в интеллектуальной робототехнике

Автор: Кузьмичв Семн Юрьевич, Иванчин Никита Геннадьевич, Решетников Андрей Геннадьевич
Журнал: Сетевое научное издание «Системный анализ в науке и образовании» @journal-sanse
Статья в выпуске: 2, 2017 года.
Бесплатный доступ
В статье рассматривается мини-робот как базис образовательного процесса в робототехнике для школьников организованного в университете «Дубна». Рассмотрена связь концепции интеллектуального тренажера с образовательным процессом. Представлена реализация робота дистанционного управления. Рассматривается разработанныйметодологический базис образовательного процесса.
Робототехника, интеллектуальные системы управления
Короткий адрес: https://sciup.org/14122653
IDR: 14122653
Minirobot as background of education process evolution in intelligent robotics
The article considers a mini robot as the basis for the educational process in robotics for schoolchildren organized at the University of Dubna. The connection between the concept of the intelligenttraining equipment and the educational process is considered. The implementation of the remote control robot is presented. The developed methodological basis of the educational process is considered.
Текст научной статьи Мини-робот как базис развития образовательного процесса в интеллектуальной робототехнике
Робототехника является одним из передовых и динамично развивающихся синергетических направлений науки и техники. В частности, робототехника – междисциплинарное направление, занимающаяся разработкой автоматизированных технических и производственных систем, является важнейшей технической основой интенсификации производства. Развитие робототехники требует одновременного развития нескольких направлений, в том числе и одно из ключевых направлений – технологий проектирования интеллектуальных систем управления (ИСУ) [1-3].
Сейчас с раннего возраста жизнь наполнена различной высокотехнологичной техникой и информационными источниками, однако, курсы информатики и информационных технологий в школе сильно отстают от темпов развития и внедрения этих технологий в нашу жизнь. К сожалению, образовательная программа высшего образования Советского Союза с распределением после окончания ВУЗа, не была в должной степени адаптирована под изменения реалий современное состояние рынка труда. Как следствие, сейчас все чаще выпускники вузов не работают по своей специальности, а ценность высшего образования существенно снижена. Напротив, этот опыт удачно прижился и видоизменился в передовых странах мира (Японии, Финляндии, и мн. др.). Компании и корпорации, заинтересованные в высококвалифицированных специалистах, сотрудничают со школами и университетами с целью подготовки кадров. Более того, обучающиеся целенаправленно проходят образовательные программы зная, что в дальнейшем эти знания и умения пригодятся в профессиональной деятельности. Важной отличительной особенность является то, что образовательные программы основаны на самых современных информационных технологиях, а исследования учащихся являются средством развития этих технологий с дальнейшей апробацией в компаниях участниках такого альянса сотрудничества.
Зарубежное состояние развития образовательной робототехники показывает, что, например, в Японии, предмет «программирование» включен в образовательную программу начальных классов. Программа средней школы включают подготовку на моделях автономных роботов, андроидов, манипуляторов и простых систем стабилизации. Направления высших учебных заведениях связано с развитием технологий проектирования и разработки программного обеспечения для новых роботизированных систем. Самыми популярными и представительными будут примеры Питтсбурского ( Pittsburgh ) и Стэнфордского ( Stanford ) университета. Результатами такой работы стали операционные системы для роботов (ROS) и всевозможные запатентованные алгоритмы и программные комплексы обработки информации, представляющие коммерческую привлекательность.
На рис. 1 представлен учебно-исследовательский робот «мобильный манипулятор» этих университетов (HERB: Home Exploring Robotic Butler [4] и STAIR: STanford Artificial Intelligence Robot [5] и мн. др.) являющиеся источниками для создания новых информационных технологий и программных продуктов.
HERB

STAIR
1960 – 1970 гг.
2005 - 2010 гг.
2010 - 2015 гг.
Рис. 1. Роботы ведущих университетов
Очевидно, что для создания образовательных лабораторных роботов и программ передовые университеты не используют унифицированные конструкторы и комплектующие. Для этих целей приобретается самое современное оборудование - видео и тепло камеры, лазерные радары, манипуляторы, двигатели и платы, развивают свое программное обеспечение. Именно, огромное изобилие самых современных сенсоров, вычислительных машин и исполнительных механизмов, позволяют создавать все новые и более совершенные алгоритмы обучения, адаптации и самоорганизации интеллектуальных систем. Каждая из таких технологий закладываемое в конечно изделие является объектом интеллектуальной собственности и подлежит тщательной защите.
Результаты применения таких работ воплотились в появление специализированных программных инструментариев для проектирования систем управления. В свою очередь создание открытых библиотек на базах этих инструментариев позволило привлекать огромный класс специалистов и исследователей, для программно-аппаратного интерфейса, что дает толчок развитию архитектуры технологий, инструментариев и продуктов коммерческой собственности.
В средних и старших классах наступает этап подведения промежуточных профессиональных итогов, когда человек задумывается о перспективах и отвечает на многие важные для себя вопросы о будущем в профессии и желательном направлении дальнейшего развития. В ближайшее время навыки программирования будут необходимы практически для любой деятельности в сфере ИТ, а одним из наиболее интереснейших способов получить такие навыки является образовательная робототехника, где на занятиях ученики работают, как с механическими, так и с электрическими устройствами, заставляя их выполнять написанные программы.
Одним из способов подготовки людей к будущей профессиональной деятельности в сфере высоких технологий и уменьшение колоссального отставания в сфере информационных технологий - является развитие образовательной интеллектуальной робототехники.
В интернете представлено множество открытых примеров образовательных роботов, некоторые из них представлены на рис. 2:

Рис. 2. Примеры образовательных роботов
Курс образовательной робототехники, проводимый в университете «Дубна», основан на концепции интеллектуального робота-тренажера (рис. 3) [1, 3] и включает в себя:
-
1. современные технологии проектирования робототехнических систем и систем интеллектуального управления, разрабатываемые и исследовательской лаборатории;
-
2. макеты и модели робототехнических систем, созданные учащимися [6];
-
3. программные инструментарии проектирования интеллектуальных систем управления, инструментарии математического моделирования и 3 D -проектирования технических систем [7].

Рис. 3. Структура интеллектуального тренажера
В процессе обучения учащиеся реализую проект от идеи создания робота, до выпуска макета и представления результата в виде участив в конференции и публикации статьи. В процессе работы учащиеся моделируют и изготовляют отдельные комплектующие детали роботов, печатные платы. Участвуют в построении математической модели робота и системы управления.
Важно отметить, что каждый участник работает со своим набором комплектующих, что позволяет продолжать выполнения работы и в свободное от занятий время. Проводятся занятия в специализированном кабинете.
В качестве среды программирования выступают Arduino ( C ++) для программирования микроконтроллеров, ROS ( C ++, Python ) для программирования автономного поведения робота (навигация, распознавание, частично дистанционное управление), Matlab для математического моделирования (движение робота). Отметим, что эти среды программирования включают в себя возможность подключения модуля для Lego Mindstorms NXT (что показывает возможность масштабирования образовательного процесса и на конструкторы Lego ) [2, 3].
В образовательном процессе ученики знакомятся с методами и средствами разработки и реализации программных продуктов, учатся работать с подключаемыми библиотеками, знакомятся с типами данных, массивами, структурами, классами, объектами, формируют начальные навыки программирования.
Образовательный процесс включает в себя лекционные занятия, семинары и лабораторные практикумы, последовательно раскрывающих возможности программных инструментариев вычислительных систем. Компьютер рассматривается как инструмент в должной степени детализации архитектуры и операционных систем.
Так, целью образовательного процесса со школьниками стало:
-
- профессиональная ориентация в подготовка учеников;
-
- формирование и развитие навыков работы с языками программирования высокого уровня, работы с программными инструментариями моделирования и дизайна;
-
- стимулирование самоорганизации и самообразования в области информационных технологий;
-
- получение навыков для эффективного обучения в университете и ведение научной деятельности;
-
- ознакомление учеников с возможностями объектно-ориентированных языков программирования и развитие навыка программирования на языках высокого уровня ( C ++, Java , C #);
-
- развитие понимания базовых принципов теорией автоматического управления и теории информации, электротехники и мехатроники на примере робототехники;
-
- ознакомление учащихся с современными методами и средствами проектирования программного обеспечения для роботов в том числе интеллектуальных систем ;
-
- стимулирование интереса к технике, конструированию, программированию, новым информационным технологиям;
-
- формирование навыков подготовки презентационного материал, выступления на конференциях, написание публикаций (на русском и английском языке), участие в всероссийских и международных конкурсах и мероприятиях;
-
- развитие навыков коллективного труда и работы в команде, работы на результат и персональной ответственности;
-
- стимулирование саморазвития и самоорганизации учащихся.
При этом постепенное освоение материала наслаивается на более серьезные задачи из области робототехники:
-
- дистанционно управляемый робот;
-
- робот дистанционного присутствия;
-
- робот-манипулятор;
-
- обработка изображения и распознавание образов;
-
- мини-робот с манипулятором;
-
- автономный робот с навигационной системой ;
-
- взаимодействие группы роботов.
В качестве базиса представленного образовательного процесса выступает мини -робот дистанционного управления. Рассмотрим подробнее этот этап.
Аппаратная реализация мини-робота
На рисунке 4 представлена аппаратная реализация мини-робота. Центральным элементом является микроконтроллер Arduino, на базе процессора ATmega с тактовой частотой 16 МГц. Для питания робота используется батарея 9 вольт. Управление двигателями реализуется через драйвер двигателей L 298 N .
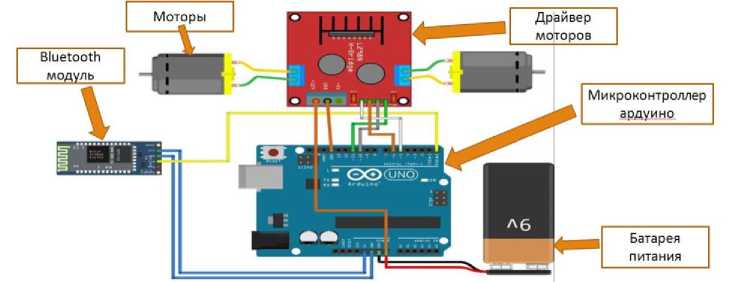
Рис. 4. Аппаратная реализация мини-робота
В качестве среды передачи данных рассматривались различные варианты дистанционного управления. Например, XBee - это модуль, дающий вашему устройству возможность использования протокола ZigBee. Другой вариант это один из самых популярных и распространенных методов обмена данными посредством Bluetooth. Инфракрасные лучи ( IR ) - самый дешевый способ для удаленного управления устройством в невидимом диапазоне света. Работа над приёмом и передачей данных по Wi - Fi , для взаимодействия с сырым TCP -сокетом или с serial -портом компьютера.
В качестве среды передачи данных был выбран Bluetooth модуль, так как это довольно простой в реализации, самый доступный и понятный модуль и для данного проекта.
Программная реализация Arduino и приложение Android
В данном проекте использовалось несколько Bluetooth -приложений для отправления различных символов на приемник и тестирования работы программы и робота в целом. Вначале использовался обычный классический Bluetooth- терминал для передачи отдельных символов и получения ответа. Так в командной строке тестировалось приложение. Далее использовался Bluetooth -терминал в виде пульта, у которого на каждую кнопку прописан отдельный символ - команда (рис. 5).
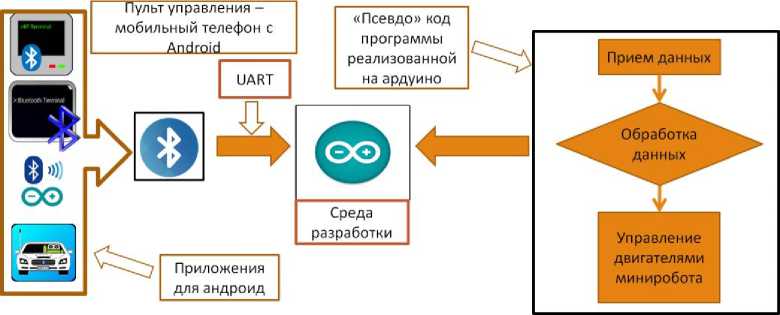
Рис. 5. Структура программной реализации
В качестве протокола передачи данных использовался протокол UART ( Universal asynchronous receiver transmitter ) или, по-русски, (универсальный асинхронный приемопередатчик) - старейший и самый распространенный на сегодняшний день физический протокол передачи данных. Наиболее известен из семейства UART протокол RS -232 ( COM -порт). Это, наверное, самый древний компьютерный интерфейс. Он дожил до наших дней и не потерял своей актуальности. В данной работе мы использовали 2 линии СОМ -порта: ТХ -отправка и RX -прием данных.
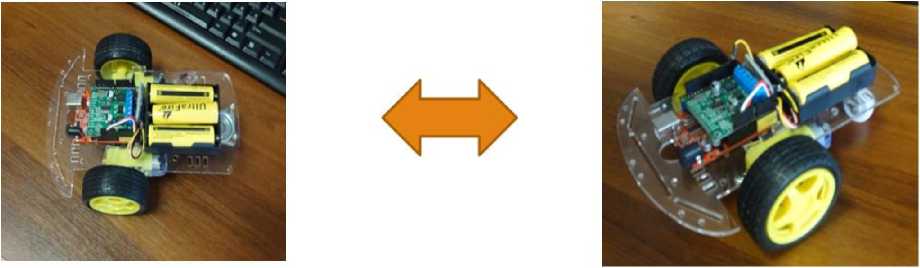
Рис. 6. Мини-робот
В качестве среды разработки использовалось Arduino IDE , в которой была написана программа на языке С ++ с подключением библиотек управления двигателями и управления COM -портом. На рисунке 5 справа, представлен псевдокод реализованной программы.
Выводы
Необходимость подготовки специалистов в области интеллектуальных систем управления и робототехники требует организации инновационного процесса обучения с привлечением наукоемких информационных технологий проектирования интеллектуальных систем управления. В университете «Дубна» уже разработаны и активно внедряются современные технологии образовательной робототехники на базе концепции интеллектуального тренажера.
Разработка и апробация технологий проектирования интеллектуальных систем управления сопровождается выполнением дипломных работ в рамках разработанных технических задания для бакалавров и магистров. Активное участие школьников позволяет формировать креативный и активный процесс развития данного направления.
Так, для обучающихся результатами работы данного этапа стало:
-
- мини-робот дистанционного управления (рис. 6);
-
- приобретены начальные навыки программирования на языке С++;
-
- знакомство с элементами аппаратной реализацией роботов;
-
- опыт работы в научно исследовательской группе.
Таким образом реализуется инновационный креативный образовательный процесс по индивидуальной траектории обучения школьников.
Список литературы Мини-робот как базис развития образовательного процесса в интеллектуальной робототехнике
- Ульянов С. В.Интеллектуальная робототехника. Ч.1: Креативный когнитивный образовательный процесс - синергетический эффект альянса сотрудничества «колледж - университет - компания - рынок»// Системныйанализвнаукеиобразовании: сетевоенаучноеиздание. - 2016. - №4. - [Электронный ресурс]. URL: http://sanse.ru/download/274.
- Ульянов С. В., Решетников А. Г., Тятюшкина О. Ю. Интеллектуальная робототехника Ч.2:Социо - экономическая - техническая платформа когнитивного образовательного процесса //Системныйанализвнаукеиобразовании: сетевоенаучноеиздание. - 2016. - №4. - [Электронный ресурс]. URL: http://sanse.ru/download/277.
- Ульянов С. В., Решетников А. Г., Тятюшкина О. Ю. Интеллектуальная робототехника Ч.3: Концепция когнитивного обучения - интеллектуальный роботренажер // Системныйанализвнаукеиобразовании: сетевоенаучноеиздание. - 2017. - №1. - [Электронный ресурс]. URL: http://sanse.ru/download/283.
- Siddhartha S. Srinivasa, Dave Ferguson, Casey J. Helfrich, Dmitry Berenson and at. HERB: a home exploring robotic butler, Springer Science Business Media, LLC 2009. - [Электронныйресурс]. URL:www.ri.cmu.edu/pub_files/2010/1/HERB09.pdf. - (датапосещения: 26.11.2016).
- STAIR: StanfordArtificialIntelligenceRobot.- [Электронныйресурс]. URL:http://stair.stanford.edu/. - (датапосещения: 26.11.2016).
- Решетников А.Г., Николаева А.В., Повидало И.С., Ноздрачев А.В., Ульянов С.В. Взаимодействие интеллектуальных робототехнических систем// Системныйанализвнаукеиобразовании: сетевоенаучноеиздание. - 2015. - №1. - [Электронный ресурс]. URL: http://sanse.ru/download/235.
- Решетников А.Г., Ульянов С.В. Применение технологии проектирования интеллектуальных систем управления на основе мягких вычислений. // Системныйанализвнаукеиобразовании: сетевоенаучноеиздание. - 2015. - №1. - [Электронный ресурс]. URL: http://sanse.ru/download/231.
