Минимизация погрешностей определения координат геофизических скважин

Автор: Цветков Г.А., Костицын В.И., Петров Ю.П.
Журнал: Вестник Пермского университета. Геология @geology-vestnik-psu
Рубрика: Геофизика, геофизические методы поисков полезных ископаемых
Статья в выпуске: 10, 2008 года.
Бесплатный доступ
Предпринята попытка совершенствования приемов и средств возбуждения упругих колебаний в генераторе сейсмических колебаний (ГСК). Геометрия реального ГСК отличается от идеальной осесимметричной формы, что влечет за собой отклонения значений параметров геометрии масс (отклонения центра масс, главных центральных осей инерции), вследствие статической и динамической несбалансированности. От качества закона изменения суммарной силы сопротивления вылета и возврата плунжера зависят характер сил и моментов, действующих на ГСК в целом и на отдельные агрегаты, динамические нагрузки, приводящие к появлению поперечных волн при возбуждении сейсмических колебаний, влияющих на точность определения местоположения забоя. Применение изложенной методики позволит минимизировать поперечные составляющие сейсмической волны до уровня функции погрешностей балансировки и повысить точность определения забоя скважин.
Координаты, геофизические скважины
Короткий адрес: https://sciup.org/147200704
IDR: 147200704 | УДК: 550.832
Errors minimization in geophysical wells position determination
On the basis of the carried out researches at the decision of seismic surveying tasks an attempt on advancement of methods and means of excitation of elastic vibrations by the generator of seismic vibrations (GSV) is made. The geometry of the real GSV differs from the ideal axially symmetric form resulting in deviations of mass geometry parameters (deviations of the center of mass, main central axes of inertia) that is a consequence of the static and dynamic disbalance. The character of forces and moments acting on the GSV, as a whole and on separate units, depends on quality of the law of total force change of escapement and plunger return resistance; dynamic loads resulting in occurrence of transverse waves at excitation of seismic vibrations deterioting the accuracy of determination of well bottom position are formed. Application of the given technique will allow to minimize transverse components of a seismic wave up to a level of balance errors function and to increase the accuracy of well bottom determination.
Текст научной статьи Минимизация погрешностей определения координат геофизических скважин
Координаты пространственного положения забоя обсаженных и необсаженных скважин определяют на основе регистрации времени распространения акустических сигналов. Одним из направлений совершенствования методов сейсморазведки является совершенствование способов и средств возбуждения упругих колебаний [2,3]. Обычно генерируемый сигнал распространяется в виде продольной волны, однако вследствие отклонения геометрических и весовых характеристик генератора сейсмических колебаний (ГСК) возможно возбуждение поперечных волн, приводящих к смещению вектора колебательного ускорения в точке приема. Целью данной работы является рассмотрение одного из вариантов уменьшения величины поперечной волны.
Схема генератора сейсмических колебаний минометно-плунжерного типа приводится на рис.1.
Рис.1. Схема установки ГСК: 1 - миномет, 2 – плунжер, 3 – контейнер, 4 – направляющая
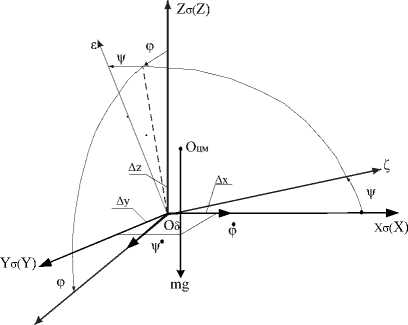
Системы координат, связанные с минометом и плунжером ГСК - генератора сейсмических колебаний, представлены на рис. 2.
η
Рис.2. Система координат элементов установки ГСК: XYZ – система координат, связанная с минометом; X Z Y – базовая система координат плунжера; £Ц£ - связанная базовая система координат; A x , Л у , A z - координаты центра масс плунжера в базовой системе
где fix , в , в — коэффициенты демпфиро-
2C вания по связанным осям, a0Y =---;
m
С „ С
2 Y2 Z aOY ; aOZ mm
.
Угловая скорость разворота связанной системы координат относительно базовой может быть представлена в виде
a = ip) + j p + kO .
Уравнение угловых движений по формуле
^^ + ox K = V M
_ dt ^
где K – кинетический момент:
K = J • a ,
(7) определяется
J =
^ J XX
—
J XY
J
XZ
—
—
У
J XY
J XZ
JYY
J ZY
JZ
J zz у
,
Вектор смещения центра масс в связанной системе координат определяется по формуле
^ M - вектор моментов.
Проекции моментов сил на связанные оси
r = i ( A x + A z p ) + j ( Л y -A z p ) + + k ( A z -A x у + A y p ),
будут иметь такой вид:
M Q = mg A y - C p • p , M n = mg A x - C p у ,
где p и p - углы поворота связанной системы pq£ относительно базовой системы
M .
= 0 .
С учетом формул (8), (9), (10), (11), (12), (13) получим выражение:
X ^ Z ^ Y . .
Проекция силы тяжести mg на связанные оси может быть представлена в виде
F = - i mg у - j ( mg p) - kmg . (2)
При контакте с минометом сила реакции определяется жесткостью:
F^ = i Cx 86 + jCY 8Y + kCz 8Z , (3) где C , C , C – коэффициенты жесткости в осях базовой системы координат.
С учетом (2) и (3) получим уравнения поступательного движения:
8x + 2px8x + o2,8x = gу,(4)
Sy + 2P Y 8y + Ю OY 8y = g ф,( 5)
8z + 2p Z 8z + o2z 8z = g,(6)
T dp) d p
J XX --+ Cm ’ p — J XY ---
XX dt p XY dt
—
-
- JxyPp + Jyy • P2 = mgAy, dp
JYY + Cp ' P J XY dtdt
-
+ J XX pp - J xy • P 2 = mg A x ,
—
г dp
XZ dt
—
T dP
JZY , JXYpp + dt
+ JYY ' P^ = 0.
Решив уравнения (4) – (6), получим
8 x = C i x exp [ - в + ^
+ C 2 X exp [ fi x V fi x
+4- • r , ^ OX
-
a OX ] • t +
®Ox ] t +
-
Sy = C , y exp [ — e Y + №
-
® OY ]
+ C 2 y exp [- P y - ^21
+ g^T- • ^ ,
^ OY
-
^ OY
] • t +
• t +
S = C 1 Z exp [ - fi z + 7 fi z - ^ OZ ]■ t +
C 2 Z exp [ — fi z - V fi z - ^ OZ ] • t + 2” ,
^OZ где fix > ^OX , Py > ^OY , fiz > ^OZ .
В выражениях (17) – (19) первые два слагаемых при t ^ от обращаются в нуль. Тогда зx = 4g- • V , (20)
® OX
g
3 У = —T~ •Ф , (21)
® OY
|
Первый |
член |
разложения |
функции |
в ряд |
||
|
Фурье будет иметь вид |
||||||
|
Ф 1 X |
= B x |
T • |
г sin n x I |
2 T |
(26) |
|
|
T |
7 Tix j |
2T O |
||||
|
Ф 1 Y |
= B y |
T |
г sin n y i |
2 T |
(27) |
|
|
T |
7 п J |
, O |
||||
|
Ф 1 Z |
= B z |
T • |
г sin n z i |
2 T |
(28) |
|
|
T |
7 n J |
, O |
||||
|
где |
I |
|||||
|
Bx = Bx |
gT ^ J xY , J , 7 ^ OX |
A y J |
, |
(29) |
||
|
B y = By |
g^wJ J 2 , ^ , XY , XX , 7 ^ OY |
I A x J |
, |
(30) |
||
|
B z = B z |
s r 2 7 ^ oz J |
. |
(31) |
|||
Тогда уравнение волны для каждой из связанных осей будет таким:
W . = A . B x ,
Sin n x I
--------I , T , T O n x J
• 2 п Г
• Sin — I t
T 7
—
x I
I , c J
W n = A n By ,
Sin n y
8 z = 4
® OZ
.
■ 2 п Л
• Sin —I t t 7
—
7 n J
, T , T o
y I
I , c J
Уравнения сейсмических волн в системе координат n— примут следующий вид:
д2W 1 д W2
---1 +--7---о =Фх COS дx2 C2 д t2 X
W = A - B z ,
—
x I C J ,
Sin n z I
-------- I , T , T O n z J
д 2 W, .
д У2
£ д W
C2 д t2
_ 2 n Г
= Ф Y cos— t
T I
—
У 1
• 2 n (
• Sin —I t t 7
z
c
I .
д 2 W
----~ + д z 2
1 д W --- = Ф7
C2 д t2 Z
2 n Г cos— t
T I
c J
,(24)
z Л
—
c J
,(25) где Т – период волны, с – скорость распространения волны.
В результате получаем составляющие поперечных волн W , , W n , W s , которые опре-
деляют несбалансированность плунжера. Для ослабления воздействия поперечных составляющих сейсмической волны проводим статическую и динамическую балансировку ГСК [4, 5], рассчитываем параметры эллипсоида инерции по известной методике [1] и вычисляем углы отклонения главных центральных осей инерции (ГЦОИ) по формулам:
γx
Jx 2 y
Jx 2 z
dp
dw
γ y
\ ( Jxx - J yy ) 2 ( J xx — J yy ) 2
J yz
J zz - J yy
dt t = 0
dt t = 0
4 = 0 = W| , = 0 = 0 (40)
где J , J , J – моменты инерции относительно базовой системы координат,
J , J , J – центробежные моменты инерции.
При установке плунжера в корпусе генератора сейсмических колебаний необходимо развернуть базовые оси плунжера относительно корпуса миномета на угол рассогласования до совмещения ГЦОИ с базовыми осями, при этом плунжер относительно базовых осей OXист,OYист,OZист занимает положение, в котором вектор виброускорения будет направлен вдоль оси OZ базовой системы координат плунжера и связанной с базовой системой координат ГСК, тогда главные центральные оси плунжера, миномета и корпуса генератора сейсмических колебаний будут совпадать.
Координаты центра масс плунжера Ax = Ay = Az = 0, J_. = JY7 = JV7 = 0, XY XZ YZ тогда J примет вид
получим
4 = 0 ,(41)
W = 0 .(42)
С учетом (41), (42) формулы (20), (21) примут вид
Тогда, приняв во внимание (41), (42), (43), (35), получим для составляющих сейсмических волн (32), (33)
W. * 0,(44)
Wn « 0.
Следовательно, составляющая сейсмиче-
ской волны по оси Z будет
B Z
g
V n z J
, t , T \
J XX 0 0
JYY 0
J ZZ у
Из формулы (16) получаем
J yy W 2 = 0 ,
тогда
.
Уравнения (14), (15) запишем в виде
■ 2 п Г.

Таким образом, статическая и динамическая балансировки агрегатов генератора сейсмических колебаний, формирующих динами-
ческие нагрузки, позволяют сохранить одну составляющую сейсмической волны (46), а поперечные составляющие могут быть сведены до уровня функций погрешности баланси-
ровки.
Выводы
Jxxd4+C' 4=0, dt dw.
dt
При начальных условиях
Приведенные результаты исследования не имеют абсолютного характера, их необходимо рассматривать как оценки областей, которым нужно уделять особое внимание при проектировании, построении схем контроля генератора сейсмических колебаний, служащих повышению точности определения координат местонахождения забоя скважин.
Список литературы Минимизация погрешностей определения координат геофизических скважин
- Гернет М.М. Определение моментов инерции/М.М. Гернет, В.Ф. Ратобыльский. М.: Машиностроение, 1969. 258с.
- Девяткин В.Д. Совершенствование сухопутной сейсморазведочной техники с применением АФЗ/В.Д. Девяткин, Б.А. Дроздов, И.А. Ожиганов, М.Н. Романов//Матер. междунар. сем. «Научно-технический потенциал Западного Урала в области конверсии военно-промышленного комплекса». Пермь, 2001. С. 143 -146.
- Лунев В.Г. Волновые поля, возбуждаемые импульсными двигателями высокого давления/В.Г. Лунев, Б.Ф. Потапов, А.В. Растегаев//Геофиз. методы поисков и разведки нефти и газа: межвуз. сб. науч. тр. Пермь: 1983. С. 112 -115.
- Цветков Г.А. Автоматизированный измерительно-вычислительный комплекс для определения массово-инерциальных характеристик космических летательных аппаратов/Г.А. Цветков//Х Санкт-Петерб. междунар. конф. по интегр. навигац. системам. СПб, 2003. С. 247 -249.
- Цветков Г.А. Инерционные характеристики элементов компоновки бурового инструмента в вопросах стабилизации, ориентации прецизионного построения скважин/Г.А. Цветков, В.А. Каплун, Л.А. Певзнер//Бурение сверхглубоких и глубоких параметрических скважин. Состояние технологии бурения, комплексных исследований и основные направления повышения эффективности: матер. всерос. совещ. Ярославль: ФГУП НПЦ «Недра», 2001. С. 193 -198.
