Многофакторный выбор электромеханического модуля для перспективного сбалансированного манипулятора

Автор: Даньшина Анжела Александровна, Пятибратов Георгий Яковлевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электроэнергетика
Статья в выпуске: 3 т.16, 2016 года.
Бесплатный доступ
Применена методика многофакторного определения рациональных параметров передаточных механизмов для выбора электродвигателя систем вертикального перемещения груза с помощью перспективного сбалансированного манипулятора. Комплексный подход выбора силовой части сбалансированного манипулятора основан на учете трех основных ограничений: согласование скоростей двигателя и исполнительного механизма манипулятора, работа привода с минимально возможным значением максимального крутящего момента, обеспечение режима работы электродвигателя в режиме его стоянки под током при номинальной нагрузке. Выбор требуемого значения радиуса приведения механизма из допустимых его значений рекомендуется выполнять с применением компромиссного выбора рационального значения радиуса приведения, удовлетворяющего выполнению всех рассматриваемых условий. Рациональные параметры электромеханического модуля выбраны при вариации значения радиуса приведения двигателя с учетом критерия минимизации суммарного максимального момента двигателя, что обеспечило компромиссный выбор требуемых параметров электромеханического модуля. Для создания перспективного сбалансированного манипулятора рекомендовано применять высокоскоростные синхронные электродвигатели с возбуждением от постоянных магнитов.
Сбалансированный манипулятор, многофакторный выбор, электромеханический модуль, система вертикальных перемещений
Короткий адрес: https://sciup.org/147158361
IDR: 147158361 | УДК: 62-83.001.5 | DOI: 10.14529/power160303
Multifactorial determination of electromechanical module for prospective balanced manipulator
The method of efficient multifactorial determination of transmission gear parameters for selection of an electric motor of the vertical load motion system equipped with a prospective balanced manipulator was applied. The complex approach to selection of the power circuit for the balanced manipulator is based on considering three main restrictions: synchronization of electric motor and manipulator actuator rates, drive operation with the lowest possible value of the maximum torque and providing a stand-by mode of alive electric motor at the rated load. The required value of the gear reduction radius should be selected from the allowable range with the method of a compromise rational value of the reduction radius that could comply with all considered conditions. Rational parameters of the electromechanical module were selected at varying value of the motor reduction radius with due regard to the minimization criterion of the total maximum motor torque. Thus, the compromise selection of the required parameters of the electromechanical module was provided. It is recommended to apply high-speed synchronous electric motors with permanent magnetic field for development of prospective balanced manipulator.
Текст научной статьи Многофакторный выбор электромеханического модуля для перспективного сбалансированного манипулятора
Развитие средств механизации и автоматизации различных производств предполагает совершенствование обслуживающих их манипуляторов и роботов. В настоящее время при механизации процессов, связанных с перемещением различных изделий и грузов, широко применяются сбалансированные манипуляторы (СМ). Особенностью этих манипуляторов является компенсация веса звеньев и устройств подвеса груза с помощью противовесов или пружин, что позволяет улучшить энергетические показатели работы приводов [1]. Поэтому, в настоящее время СМ находят широкое применение в различных отраслях промышленности с целью механизации ручного труда по перемещению различных грузов [1, 2]. Для обеспечения высокой производительности погрузочноразгрузочных работ и повышения уровня эксплуатации манипуляторов возникают задачи по разработке и совершенствованию их электромеханических систем [3, 4].
Среди рассматриваемых СМ можно выделить манипуляторы, реализованные с применением системы управления усилиями, которые позволяют осуществлять частичную или полную компенсацию силы тяжести не только звеньев, но и перемещаемого рабочим груза [5], сил инерции элек- тромеханического модуля (ЭММ) [6], сухого и вязкого трения [7]. Эти задачи управления усилиями в механизмах СМ целесообразно решать с применением электромеханических силокомпенсирующих систем (ЭСКС). В этом случае на начальном этапе проектирования перспективных СМ с электроприводами (ЭП) главной задачей становится выбор двигателя и передаточного механизма, которые должны обеспечить их необходимое функционирование. При этом необходимо определить рациональные технические характеристики электродвигателя СМ с учетом выполнения ряда условий и ограничений. Для эффективного решения этой задачи целесообразно использовать методику многофакторного определения требуемых параметров механизма и ЭП, приведенного в [5].
Постановка задачи исследований
Для улучшения энергетических и массогабаритных показателей ЭСКС важно выбрать и реализовать ЭП, обеспечивающий выполнение всех предъявляемых к СМ требований. При выборе ЭП и механизма перемещения грузов в вертикальной плоскости необходимо учитывать ряд противоречивых требований, специфических режимов и условий работы СМ. Для повышения эффективности и качества работы ЭСКС необходимо комплексно решить ряд взаимосвязанных задач: обеспечить необходимые параметры движения исполнительного механизма (ИМ); компенсировать вес груза и звеньев СМ, уменьшить влияние сил трения и инерции движущихся масс; обеспечить требуемую точность управления усилиями в упругих механических передачах; улучшить весогабаритные характеристики ЭММ; уменьшить с помощью ЭП динамические усилия, обусловленные упругостью механических передач и конструкций; обеспечить длительное поддержание и плавное изменение значительных по величине крутящих моментов на валу двигателя в режиме стоянки под током. Для этого необходимо обоснованно выбрать рациональные кинематические схемы, параметры механизмов и ЭП с учетом особенностей работы СМ.
Исследование, выполненные в [8] показали, что при разработке рациональных методов решения многофакторных задач их необходимо сводить к оптимизации какого-либо одного обобщенного параметра. При проектировании СМ в качестве обобщенного параметра предлагается принять требуемый радиус приведения, связывающий скорости вращения двигателя Од и перемещения груза V0 с кинематическими параметрами меха- нических передач:
= VL = d б = d „ Р тр О. 2 in i р 2i р ,
где iр , iп – передаточное число редуктора и коэф- фициент кратности полиспаста; dб , dш – диаметры барабана в канатной передаче или шестерни в реечной передаче.
Целью данной работы является определение рациональных параметров ЭММ перспективного СМ, способного обеспечить требуемое его функционирование. Для этого на начальном этапе проектирования СМ предлагается определить возможность применения и сопоставить эффективность использования электродвигателей различных серий. При этом необходимо решить задачу определения допустимых значений радиуса приведения р доп , который учитывает основные ограничивающие факторы: согласования скоростей движения ИМ и двигателя; минимизации требуемого максимального момента двигателя M м и обеспечения допустимого момента двигателя при работе в режиме стоянки под током.
Решение задачи
Для решения поставленной задачи необходимо знать исходные данные, определяющие грузоподъемность манипулятора m0 и параметры движения груза: скорость V0 и ускорение a0 . Рассмотрим СМ средней грузоподъемности, равной 150 кг, конструкция ИМ которого выполнена в виде канатной передачи и содержит дополнительно присоединенные элементы массой Am = 10 кг. Таким образом, суммарный вес груза перемещаемого манипулятором составит 160 кг.
Согласно ГОСТ 26057–84 для СМ значение требуемой скорости перемещения груза не должно превышать V < 0,63 м/с. Анализ публикаций [9–11] показал, что для обеспечения высокого уровня эксплуатации современных электромеханических СМ их максимальная скорость может изменяться от 0,18 до 0,5 м/с. Основываясь на этих данных, для возможности повышения производительности работы перспективного СМ примем максимальную скорость движения груза равной V0 = 0,5 м/с. Внешние усилия, прилагаемые оператором к грузу массой 150 кг не должны превышать значения Fв = 100 Н [12], поэтому возможное максимальное ускорение составит а0 = —F— = 100 = 0,625 м/с2. (2)
0 m0 +A m 150 + 10
С учетом приведенных исходных данных определим необходимую мощность электродвигателя. В соответствии с методикой, описанной в [8], требуемая минимальная мощность двигателя, который может обеспечить заданное ускорение при максимальной скорости движения груза можно определить по выражению
Р„ тр
= 2 к п
( m 0 +A m ) g П м + A ma 0
V =
= 2 ( 1,1...1,2 )
( 150 + 10 ) 9,81 0,8 + 10 ■ 0,625
= 2,16...2,36 кВт,
где k п = 1,1…1,2 – коэффициент запаса, учитывающий возможность несовпадения фактического радиуса приведения с радиусом приведения, обеспечивающим минимальную мощность двигателя; g = 9,81 м/с2 – ускорение свободного падения;
П м= 0,8 - КПД механизма системы вертикальных перемещений (СВП) груза.
При эксплуатации манипуляторов важным требованием является необходимость удерживать неподвижно висящий груз. Обычно в таких случаях применяют электромагнитный или электрогид-равлический тормоз. Однако при применении СМ с ЭСКС такое решение является не рациональным, поэтому одним из основных требований, предъявляемых к электродвигателю перспективного СМ, является обеспечение режима длительной стоянки двигателя под током при статических нагрузках, обусловленных максимально допустимым весом груза.
Определим эффективность применения электродвигателей разных серий, которые могут обеспечить предъявляемые к СМ требования. В рассматриваемом диапазоне мощностей к ним можно отнести выпускаемые отечественной промышленностью высокомоментные электродвигатели постоянного тока серий ПБВ и 2ПБВ, вентильные электродвигатели серий ДВУ, 2ДВУ, 3ДВУ и 2ДВУ2М и синхронные электродвигатели с возбуждением от постоянных магнитов серии 5ДВМ [10], технические характеристики которых представлены в табл. 1.
В табл. 1 обозначено: P , Ω – номинальные нн значения мощности, скорости вращения и момента электродвигателя; M0 – допустимый момент длительной стоянки двигателя под током; Jд , mд – момент инерции и масса двигателя.
При решении задачи многофакторного определения рациональных параметров силовой части электропривода рациональным подходом является сведение ее к оптимизации какого-либо обобщенного параметра. При выборе электродвигателя в качестве обобщенного параметра целесообразно принять радиус приведения. При этом предлагается анализировать влияние радиусов приведения, которые согласовывают параметры движения двигателя и груза ρΩ ; определяют минимально возможное значение требуемого максимального момента двигателя ρ м , способного обеспечить заданное ускорение движения груза; обеспечивают режим стоянки двигателя под током ρ ст при действии максимального статического момента M с .
Согласно методике [8] в общем случае решение поставленной задачи заключается в определении требуемого радиуса приведения механизма СВП, который должен входить в диапазон его допустимых значений ρ доп , при одновременном учете всех рассматриваемых условий и ограничений. Для выбора рациональной серии электродвигателя целесообразно учитывать условия, ограничивающие эффективность работы СМ, которые указаны в табл. 2.
В табл. 2 приняты следующие обозначения: Ω д тр – требуемая скорость электродвигателя; M м – максимальный требуемый момент двигателя; M с и M дин – статический и динамический нагрузочный моменты в исследуемой системе; M ст – возможный нагрузочный момент в режиме стоянки двигателя под током.
В общем случае знаки и значения составляющих нагрузочных моментов зависят от направления, скорости и ускорения движения груза. При решении поставленной задачи необходимо исследовать наибольшее требуемое значение момента двигателя, которое будет возникать при движении груза вверх с максимальной скоростью и ускорением. Аналитические выражения для определения ограничивающих радиусов приведения могут быть найдены с учетом значений, составляющих момента двигателя в режиме стоянки под током:
Таблица 1
Технические характеристики электродвигателей
|
№ п/п |
Тип двигателя |
P н , кВт |
Ω , об/мин н |
M , Н∙м н |
M 0 , Н∙м |
J д , кг∙м2 |
m д , кг |
|
1 |
ПБВ132M |
2,2 |
600 |
35 |
47 |
0,188 |
83 |
|
2 |
2ПБВ100М |
2,23 |
2500 |
– |
8,5 |
0,01 |
20 |
|
3 |
2ПБВ100L |
2,2 |
2000 |
11 |
12,5 |
0,013 |
24 |
|
4 |
ДВУ165М |
2 |
2000 |
– |
10 |
0,0073 |
26,1 |
|
5 |
2ДВУ165S |
2,3 |
2000 |
13 |
11 |
0,0039 |
16 |
|
6 |
3ДВУ265L |
2,18 |
2000 |
10 |
13 |
0,0015 |
10 |
|
7 |
3ДВУ265L |
2,04 |
3000 |
7 |
13 |
0,0015 |
10 |
|
8 |
ДВУ2М215M-Ф |
2,3 |
1000 |
45 |
48 |
0,0225 |
57…60 |
|
9 |
5ДВМ165А |
2,09 |
2000 |
10 |
10 |
0,004 |
21 |
|
10 |
5ДВМ115L |
2,2 |
3000 |
7 |
7 |
0,00093 |
11,2 |
|
11 |
5ДВМ115M |
1,97 |
4000 |
4,7 |
4,7 |
0,00074 |
9,05 |
|
12 |
5ДВМ115S |
2,2 |
6000 |
3,5 |
3,5 |
0,00064 |
8 |
Таблица 2
Ограничивающие условия
|
№ п/п |
Требование |
Условие |
Ограничение |
|
1 |
Согласование скоростей движения груза и двигателя |
Ω д тр ≥ V 0 / ρ |
ρ тр ≥ρ Ω |
|
2 |
Минимизация требуемого максимального момента двигателя |
M м = M с + M дин = min |
ρ тр = ρ м |
|
3 |
Обеспечение режима стоянки двигателя под током |
M 0 ≥ M ст |
ρ тр ≤ ρ ст |
Mст = m0g(1 + fТП)Р , равномерном движении груза
M с = (mo + Am) g P(1 + fТП)(5)
и его максимальном суммарном значении нагрузки при движении с ускорением
Mм = Mс + Mдд + MДГ,(6)
где M с = ( m 0 + A m ) g p (1 + f ТП ) ;
M ДД = ( J д + J p ) a o /p;
M дГ = ( m 0 + A m ) ao p .
Анализ показал, что при заданных параметрах функционирования СМ динамическая нагрузка, обусловленная перемещением груза с максимальным ускорением M ДГ , составит не более 7 % от требуемой статической нагрузки двигателя.
Для определения зоны допустимых значений радиуса приведения, удовлетворяющего заданным в табл. 2 условиям и ограничениям найдем значения радиусов приведения, которые могут быть получены по следующим выражениям:
pn= Vo-;(7)
П н
( J + J ) a^ д р0
Рм ;
( m 0 + A m ) [_ g (1 + f тд ) + a 0 J
Рст = . M Д (1 + fтп),(9)
(m 0 + Am) g при выполнении условия Mс + Mдг = Mдд , где fТД – коэффициент трения движения; fТП – коэффициент трения покоя, – момент инерции редуктора.
В табл. 3 приведены значения ограничивающих радиусов приведения и соответствующие им требуемые моменты для разных серий электродвигателей, а также возможные значения требуемого момента Mтр перспективного СМ, полученные с учетом всех рассматриваемых ограничений.
На рис. 1–3 представлены характеристики двигателей, имеющих максимальные и минимальные суммарные моменты в пределах каждой серии. Индексы зависимостей, приведенных на рис. 1–3, соответствуют порядковому номеру двигателя в табл. 1.
Анализ результатов
Исследования показали, что условие стоянки двигателя под током выполняется для всех рассматриваемых типов электродвигателей. Сопоставление данных, приведенных в табл. 1 и 3 и рис. 1, показывает, что высокомоментные электродвигатели постоянного тока серии ПБВ и 2ПБВ имеют близкие значения радиусов приведения рм и pn , разница составляет 3 и 0,5 %. Однако из-за больших значений моментов инерции рассматриваемых двигателей требуемые суммарные значения момента M имеют повышенные значения. Мим нимизацию требуемого момента позволяет обеспечить двигатель типа 2ПБВ100М, имеющий номинальную скорость 2500 об/мин при значении Mтр= 6,92 Н∙м.
Анализ табл. 1 и 3 и сопоставление характеристик вентильных электродвигателей, приведенных на рис. 2, показывает, что условие р м > pn в данном случае также не выполняется, причем значения радиусов приведения р м и рп отличаются примерно в два раза. Однако из-за того, что при допустимых значениях р м зависимость требуемого момента двигателя имеет пологий характер
Таблица 3
Сравнительные характеристики серий электродвигателей
Среди вентильных двигателей наименьший требуемый суммарный момент имеет электродвигатель типа 3ДВУ265L, у которого M тр = 3,75 Н∙м.
Анализ табл. 1 и 3 и рис. 3 показывает, что среди синхронных электродвигателей с постоянными магнитами наилучшие показатели имеет двига- тель типа 5ДВМ115S, который имеет наименьший требуемый момент Mтр = 2,06 Н∙м. У этого электродвигателя разница между Mтр и Mм составляет всего лишь 16 %. У двигателей типов 5ДВМ115L и 5ДВМ115М разница между значениями M и M составляет 40 и 31 %.
тр м
Исследования показали, что для минимизации требуемого момента двигателя должно выполняться условие ρ м > ρΩ . Однако в рассматриваемом примере для всех рассматриваемых электродвигателей это условие не выполняется. В этом случае для минимизации требуемого момента двигателя
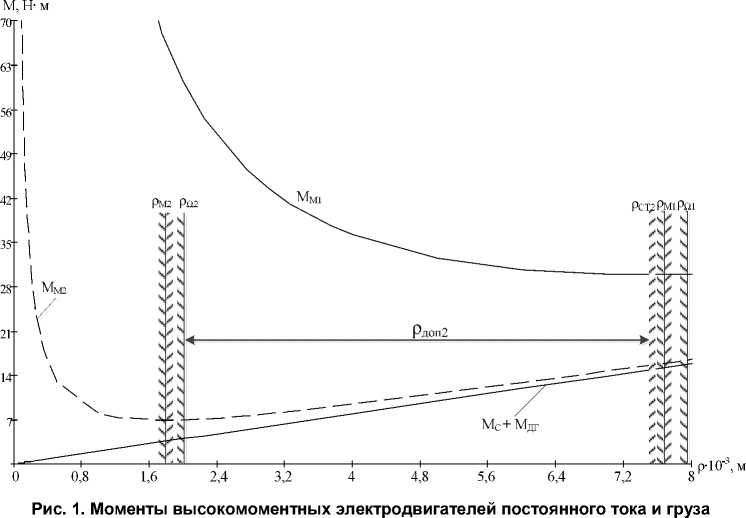
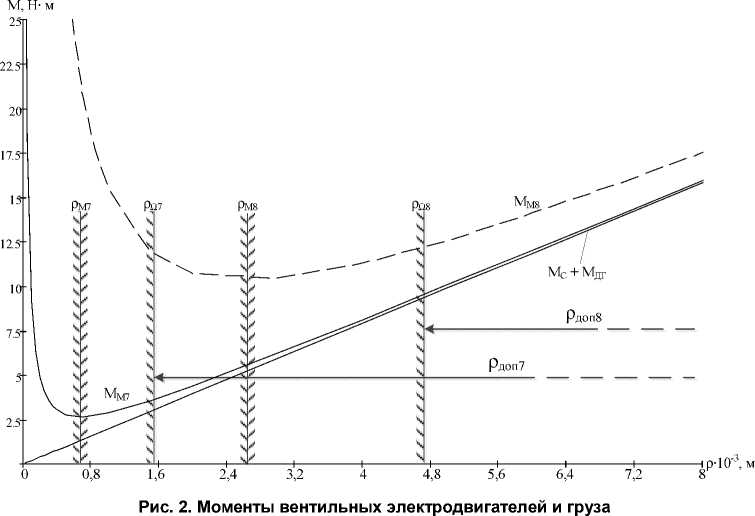
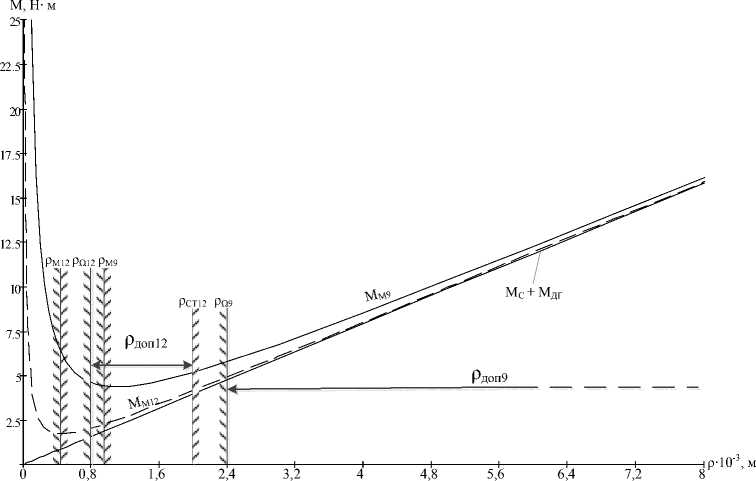
Рис. 3. Моменты синхронных электродвигателей с постоянными магнитами и груза
Показатели сравнения электродвигателей разных серий
Таблица 4
Анализ показал, что при значениях ρ м < ρΩ определяющим фактором при выборе рационального значения ρ тр является условие согласования скоростей двигателя и груза, поэтому требуемый момент электродвигателя M тр необходимо определять по условию ρ тр = ρΩ , что может увеличить необходимую мощность электродвигателя.
Для обобщения результатов исследований и определения электродвигателя в наибольшей степени подходящего для создания перспективного СМ в табл. 4 приведены параметры наиболее эффективных типов двигателей из рассмотренных серий.
Сопоставление данных, приведенных в табл. 4, позволяет сделать вывод, что наилучшие показатели при перемещении груза с помощью перспективного СМ имеют высокоскоростные синхронные двигатели с возбуждением от постоянных магнитов. Они имеют минимальное значение суммарного момента Мм = 1,74 Н∙м из-за малого значения момента инерции. Синхронные электродвигатели имеют наименьшее значение момента Mтр = 2,06 Н∙м по сравнению с другими представленными типами электродвигателей и у них значение радиуса приведения ρм максимально приближено к ρΩ . Однако с экономической точки зрения, если сравнить стоимость рассмотренных электродвигателей в минимальной комплектации, то синхронные электродвигатели наиболее дорогие, так как имеют стоимость около 40 тыс. руб, в то время как двигатели постоянного тока 22 тыс. руб, а вентильные электродвигатели стоят около 30 тыс. руб.
Заключение
Применение методики многофакторного выбора электромеханического модуля позволяет определить рациональные параметры электродвигателя и механизма сбалансированного манипулятора при одновременном учете основных противоречивых требований, условий и ограничений. Проведенный сравнительный анализ высокомоментных электродвигателей различных серий позволили сделать следующие выводы:
-
1. Для реализации перспективного сбалансированного манипулятора определяющим параметром является номинальная скорость электродвига-
- теля, которая часто определяет значения требуемого радиуса приведения ρтр .
-
2. При низкой номинальной скорости электродвигателя радиус приведения ρΩ имеет повешенное значение, что приближает его к значению ρ ст , а при высокой скорости двигателя значения ρΩ приближаются к радиусу приведения ρ м .
-
3. При рассмотренных исходных параметрах сбалансированного манипулятора ρ м не входит в диапазон допустимых значений радиуса приведения ρ доп , поэтому часто это не позволяет обеспечить наименьшие требуемые значения момента двигателя.
-
4. При создании перспективного сбалансированного манипулятора с рассмотренными параметрами целесообразно применять высокоскоростные синхронные электродвигатели с возбуждением от постоянных магнитов, что позволит минимизировать требуемую мощность электродвигателя и уменьшить массу электромеханического модуля.
Результаты работы получены при поддержке проекта № 2878 «Развитие теории и практики создания электромеханических систем тренажерных комплексов и мобильных объектов», выполняемого в рамках базовой части государственного задания № 2014/143.
Список литературы Многофакторный выбор электромеханического модуля для перспективного сбалансированного манипулятора
- Сбалансированные манипуляторы/И.Л. Владов ; под ред. П.Н. Белянина. -М.: Машиностроение, 1988. -264 с. -(Автоматические манипуляторы и робототехнические системы).
- Сухенко, Н.А. Электромеханические и мехатронные системы управления усилиями промышленных манипуляторов: моногр./Н.А Сухенко, Г.Я. Пятибратов. -Новочеркасск: Изд-во ЮРГТУ (НПИ), 2014. -164 с.
- Сухенко, Н.А. Совершенствование систем управления сбалансированных манипуляторов/Н.А. Сухенко, Г.Я. Пятибратов//Известия вузов. Электромеханика. -2010. -№ 5. -С. 77-81.
- Сухенко, Н.А. Перспективные электромеханические системы управления усилиями промышленных манипуляторов/Н.А. Сухенко, Г.Я. Пятибратов, А.А. Даньшина//Известия вузов. Электромеханика. -2015. -№ 5 (541). -С. 76-81.
- Пятибратов, Г.Я. Принципы построения и реализации систем управления усилиями в упругих передачах электромеханических комплексов/Г.Я. Пятибратов//Известия вузов. Электромеханика. -1998. -№ 5-6. -С. 73-83.
- Дебда, Д.Е. Анализ возможностей активных и комбинированных электромеханических систем компенсации силы тяжести обезвешиваемых объектов/Д.Е. Дебда, Г.Я. Пятибратов//Известия вузов. Электромеханика. -2001. -№ 2. -С. 33-37.
- Кравченко, О.А. Компенсация влияния сил трения на качество работы электромеханических комплексов/О.А. Кравченко, Г.Я. Пятибратов//Новые технологии управления движением технических объектов: материалы II Междунар. науч.-техн. конф. -Новочеркасск: ЮРГТУ, 1999. -С. 26-28.
- Пятибратов, Г.Я. Многокритериальный выбор параметров электромеханических систем компенсации сил тяжести при вертикальных перемещениях объектов/Г.Я. Пятибратов//Известия вузов. Электромеханика. -1993. -№ 5. -С. 65-70.
- ГОСТ 26057-84. Манипуляторы сбалансированные. Общие технические условия. -М.: Изд-во стандартов, 1985. -10 с.
- Боровичский опытный машиностроительный завод. Сравнительная таблица /Боровичский опытный машиностроительный завод. -http://bomz.su/table/(дата обращения: 26.05.2016).
- Gorbel. Intelligent Lifting Devices G-Force®/Easy Arm™ /Gorbel. -https://www.gorbel.com/Resources/products/intelligentassistdevices/gforce/documents/g-forcebrochure.pdf (дата обращения: 27.05.2016).
- Knight Global, Inc. Ergonomic Material Handling Systems /Knight Global, Inc. -http://www.knight-ind.com/brochures/knight_global_ product_catalog_web.pdf (дата обращения: 27.05.2016).
- Справочник по электрическим машинам: в 2 т./под общ. ред. И.П. Копылова, Б.К. Клокова. -М.: Энергоатомиздат, 1989. -Т. 2. -688 с.
