Многофункциональная цифровая модель системы искажения и восстановления изображений

Автор: Карнаухов А.В., Мерзляков Н.С., Милюкова О.П.
Журнал: Компьютерная оптика @computer-optics
Рубрика: Обработка изображений: Восстановление изображений, выявление признаков, распознавание образов
Статья в выпуске: 20, 2000 года.
Бесплатный доступ
Статья рассматривает общие методы и алгоритмы решения задач восстановления изображений. Представлена разработанная многофункциональная модель системы искажения и восстановления изображений, которая используется как основной инструмент для реализации описанных алгоритмов и сравнения результатов их применения для двумерного случая
Короткий адрес: https://sciup.org/14058431
IDR: 14058431
Текст научной статьи Многофункциональная цифровая модель системы искажения и восстановления изображений
Восстановление изображений часто определяется как процесс оценки исходного изображения по искаженному. Всякий раз, когда точное восстановление невозможно, задача восстановления становится задачей аппроксимации. Задача восстановления обычно формулируется следующим образом: необходимо найти исходное неискаженное изображение z ( x , y ) из уравнения
Az + n = u ( x , y ) + n ( x , y ) = ~ ( x , y ) ,
( x , y ) e W (1)
где A - линейный оператор, n ( x , y ) - шум, ~ ( x , y ) -наблюдаемое искаженное изображение, u e U , и z e Z .
Методы восстановления изображений
Существующие подходы решения задач восстановления изображений условно можно разбить на 3 группы:
-
• подходы, основанные на использовании априорной и апостериорной информации;
-
• подходы, основанные на использовании методов обработки сигналов;
-
• подходы, основанные на методах теории некорректно поставленных задач.
Априорная и апостериорная информация включает в себя ряд параметров, которые учитываются при восстановлении изображений. Апостериорные данные могут быть использованы при определении искажений, которому подверглось изображение при регистрации. Апостериорное знание использует наблюдаемое изображение ~ ( x , y ) для определении некоторого параметра, описывающих искажение. Например, возможно определение функции рассеяния точки (ФРТ) по резким краевым участкам протяженных объектов изображений или по точечным объектам, о которых точно известно, что
они существуют. Другие примеры апостериорных методов включают получение оценок дисперсии шума и спектра мощности из относительно гладких областей искаженного изображения. Иногда, помехи, возникшие при регистрации, становятся очевидными при преобразовании Фурье и эти данные можно использовать в процессе восстановления. Приведенные выше примеры апостериорных методов, конечно не исчерпывают все возможные методы, но они дают представление об основных направлениях в данного подхода.
Большинство методов, разработанных на ранних этапах исследования проблемы обработки изображений, относятся ко второй группе - методам обработки сигналов [1]. Подход, применяемый в задачах обработки сигналов, использует модель с однородным оператором A и функцией рассеяния точки в (1), описываемую выражением:
~( x , y ) =
= JJ h ( x — 5 , y — П ) z ( 5 , П ) dd + n ( x , y ) ’
где ~( x , y ) - зарегистрированное наблюдаемое изображение, h ( x - 5 , y - n ) - функция рассеяния точки, n ( x , y ) - шум и z ( 5 , n ) - искомое, исходное изобра-
жение. Вид уравнения (2) подразумевает, что его вивалентное Фурье-представление может быть писано в следующем виде:
эк за-
U ( f x , f y ) = Z ( f x , f y ) H ( f x , f y ) + N ( f x , f y ) (3)
Известно, что общее линейное решение нения (2) может быть записано как
z ( 5 , n ) = JJ K ( 5 — s , П — t ) ~( s , t ) dsdt где ядро инверсии имеет следующую форму:
K ( s , t ) = -Ay JJ R ( f x , f y ) e i ( sfx + tfy ) df x df y =
4n
н * ( fx , f y ) e i sf x + tf y )
д 2 Л I |2
4 П HI ( f x , f y )| +^ ( f x , f y )
dfxdfy ,
урав-
где Т ( f x , f y ) - заданная функция.
Таким образом, при отсутствии шума, очевидный восстанавливающий фильтр – это инверсный фильтр:
R ( f x , f y ) = H - 1( f x , f y ). (6)
Тогда, z(f, n) может быть найдена путём об- ратного преобразования Фурье выражения:
Z ( f x , f y ) = R ( f x , f y )U ( f x , f y ). (7)
Однако, обратный фильтр может не существовать, если он имеет экстремумы или H( fy , fy ) не- корректно задан. При наличии шума оптимальный фильтр восстановления (в MSE критериях) это фильтр наименьших квадратов или Винеровский фильтр
R ( fx , f y ) =
H *( f x , f y )
H ( f x , f y )2
S nn ( f x , f y ) S zz ( f x , f y )
где Snn ( fx , fy ) и Szz ( fx , fy ) - спектры мощностей шума и исходного изображения, которые мы полагаем известными. Также полагаем, что шум, который был добавлен - это белый шум, то есть, его спектральная плотность постоянна, а изображение и шум некоррелированы. Этот метод хорошо работает для изображений с высоким соотношением сиг-нал/шум, которое определяется как отношение между дисперсией изображения и дисперсией шума, и плохо подходит для изображений с низким соотношением сигнал/шум.
Универсальные методы решения этой проблемы используются в регуляризационном [2-4] и статистическом подходах. В обоих случаях, решение проблемы восстановления состоит в нахождении или условного, или безусловного экстремума, и в частности к поиску минимума следующего функционала:
z = inf M (z )= inf {p (Az, u)+ аф(z)}, (9) z e Z z e Z где Φ(z) является или стабилизатором Ω(z) (в детерминированном подходе), или Гиббсовым потенциалом Γ(z) с α=1 (в статистическом подходе).
К сожалению, при прямом использовании данного метода трудно решить проблему минимизации в общем двумерном случае. Возможность упрощения задачи минимизации обычно базируется на использовании особых свойств интегрального оператора A . Во многих случаях, система отображения описывается однородным оператором, и смазанное изображение определяется уравнением (2). Если искаженное изображение u(x, y) задано на всем участке (x, y)e (-да,да), уравнение (1) является уравнением типа свертки и может быть решено с использованием метода преобразования Фурье. Фактически, искаженное изображение u (x, y) определено на ограниченной области W . Это не позволяет применять преобразование Фурье непосредственно к уравнению (1). Чтобы преодолеть это ограничение, требуется дополнительная процедура, для расширения определения искаженного изображения на весь диапазон (x,y)е(-да,да) [3].
Цифровая модель формирования системы искажения и восстановления изображений.
Эффективное нахождение общего решения задачи восстановления изображений, определенной уравнением (3), представляет собой весьма сложную задачу в том числе и из-за больших размеров изображений и как следствие, большого количества вычислений. Этот недостаток значительно ограничивает широкое использование этого подхода.
Обзор публикаций последних лет показывает, что метод Фурье до сих пор является наиболее широко используемым в задачах восстановления изображений. Хорошо известно, что метод Фурье имеет, по крайней мере, два недостатка: (a) метод применим только для решения уравнений типа свертки и (b) он может использоваться только в линейных алгоритмах восстановления. Для этого случая можно записать:
z „ = inf M ( z ) = inf {| Az - u |2 + a Z |2 } . (10)
z e Z z e Z n z y
Использование быстрого преобразования Фурье для решения этой проблемы делает Фурье-подход самым быстрым и дешевым инструментом для решения задачи восстановления. С этой точки зрения, линейные алгоритмы очень важны, поскольку они имеют общую схему основных операций, аналогичную для всех их. Это подобие даёт нам возможность создать многофункциональную цифровую модель процессов искажения/восстановления изображений и использовать ее как основной программный инструмент для разработки, выполнения и сравнения результатов применения этих алгоритмов.
Основные функциональные блоки разработанной модели выполняют следующие процедуры по обработке данных:
-
• Формирование исходного изображения.
-
• Дефокусировка исходного изображения.
-
• Наложение шума на дефокусированное изображение.
-
• Расчет восстанавливающего фильтра.
-
• Восстановление.
-
• Вычисление ошибок.
-
• Визуализация изображений и данных.
Разработанная цифровая модель содержит, наряду с наиболее широко используемыми искажающими функциями, различными видами шума и восстанавливающими фильтрами, набор итеративных алгоритмов для восстановления изображений. Она работает под управлением операционных систем Windows 95/98/NT4/2000 или выше. Взаимодействие пользователя с системой реализовано через графический интерфейс пользователя. Практическое использование разработанной модели продемонстрировано на рисунках 1 и 2.
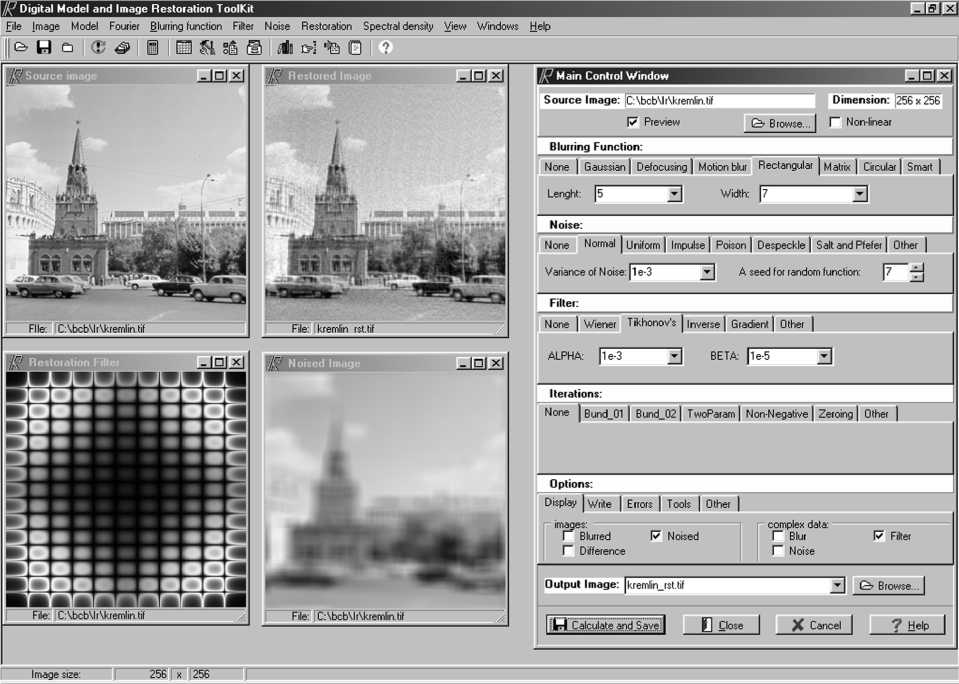
Рис.1. Экран пользователя при использовании Тихоновского фильтра.
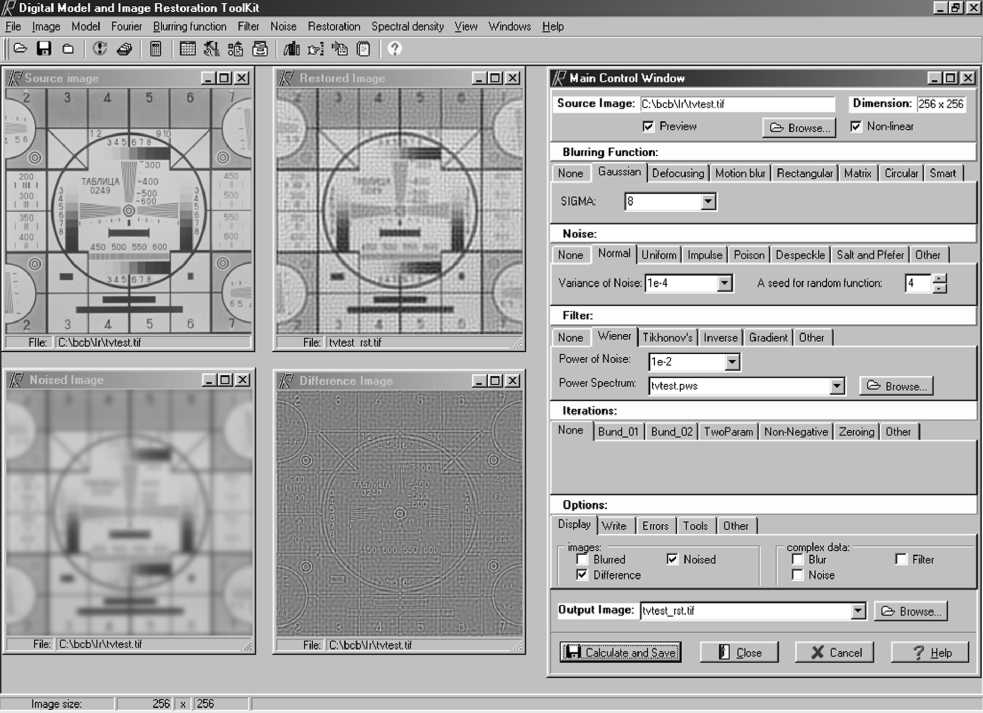
Рис.2 Экран пользователя при использовании Винеровского фильтра.
Обработка данных организована по типу конвейерной обработки. Поток данных обрабатывается последовательно "блок за блоком" со встроенными и программноизменяемыми значениями параметров. Каждый функциональный блок может быть переконфигурирован на этапе выполнения.
На рисунках изображены копии экранов пользователя при работе с моделью. Они содержат несколько графических форм:
-
• Главная управляющая форма модели, расположена на правой стороне экрана. На ней находится семь панелей, расположенных вертикально на форме: "Исходное изображение", "Искажающая функция", "Шум", "Фильтр", "Итерации", "Параметры" и "Выходное изображение".
-
• Другие графические формы используются для необязательной визуализации обрабатываемых данных на разных стадиях процесса обработки изображений.
Рассмотрим главную управляющую форму, представленную на рисунках. Первая и последняя панели используются для выбора исходного и выходного изображений. Пять других сделаны в виде панелей с блокнотами-переключателями. Каждая из них имеет набор закладок, при переключении на которые пользователь получает возможность изменения необходимых параметров. Таким образом, последовательность выбранных пользователем закладок определяет конкретную реализацию модели ис-кажения/восстановления изображения. В частности модель, представленная на рис. 1 определена следующими параметрами:
-
• Искажающая функция определена как прямоугольный смаз; т.е. соответствует прямоугольной ФРТ размером 5х7 пикселов.
-
• Аддитивный шум с дисперсией равной 0.001.
-
• Восстанавливающим фильтром выбран Тихоновский фильтр с α = 1.0 e - 3 и β = 1.0 e - 6 .
-
• Итеративный процесс не применяется.
-
• Смазанное, зашумленное изображение и фильтр восстановления будут визуализированы в процессе обработки данных.
Модель, представленная на рис. 2 определена следующими параметрами:
-
• Искажающая функция определена как Гауссова функция с σ = 6.
-
• Аддитивный шум с дисперсией равной 0.001.
-
• Восстанавливающим фильтром выбран фильтр Винера.
-
• Итеративный процесс не применяется.
-
• Смазанное и зашумленное изображения и разность между восстановленным и исходным неискаженным изображениями будут визуализированы в процессе обработки данных.
Заключение
Разработана многофункциональная цифровая модель системы искажения и восстановления изображений. Модель работает под управлением операционных систем Windows 95/98/2000/NT4.0 или выше. Модель может использоваться как эффективный инструмент для экспериментального выполнения и сравнения различных алгоритмов восстановления изображения основанных на Фурье-подходе. Все необходимые эксперименты в представленной работе были выполнены на этой модели.
Работа поддержана Российским фондом фундаментальных исследований в рамках проекта 9901-39039.
