Многоканальный алгоритм обнаружения интенсивно маневрирующих воздушных целей для импульсно-доплеровской бортовой радиолокационной станции, учитывающий априорную неопределённость частотной девиации сигнала

Автор: Лютиков И.В., Замараев В.В., Кучин А.А., Фомин А.Н., Богомолов Н.П., Копылов В.А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 8 т.7, 2014 года.
Бесплатный доступ
Статья посвящена описанию синтеза алгоритма обнаружения интенсивно маневрирующих воздушных целей для импульсно-доплеровской бортовой радиолокационной станции (РЛС). Разработанный алгоритм использует как многоканальную корреляционно-фильтровую когерентную обработку с частой времячастотной сеткой, учитывающей априорную неопределенность по четырем параметрам принимаемого сигнала (по длительности импульсов, времени задержки, частоте Доплера, девиации частоты), так и некогерентную на основе метода отношения правдоподобия за несколько частот повторения зондирующих импульсов, а именно за всё время облучения цели на фиксированной азимутально-угломестной позиции главного луча диаграммы направленности фазированной антенной решетки. При этом алгоритм учитывает результаты наблюдений за время предыдущих интервалов накопления в интересах увеличения условной вероятности правильного обнаружения воздушных целей.
Алгоритм обнаружения, интенсивно маневрирующая, импульсно доплеровская, бортовая радиолокационная станция, частотная девиация сигнала
Короткий адрес: https://sciup.org/146114912
IDR: 146114912 | УДК: 621.396.96
The intensive maneuverable air targets detection multichannel algorithm for pulse-Doppler onboard radar using the a priori uncertainty of signal frequency deviation
This article is devoted to describing the synthesis intensive maneuverable air targets detection algorithm for pulse-Doppler onboard radar that uses multiple correlative-filtration coherent process with frequent time-frequency grid, taking into account a priori uncertainties on the four parameters of the received signal (pulse duration, delay time, Doppler, frequency deviation), and uses the noncoherent processing based on likelihood ratio method for several recurrence frequency pulses that is, for all time exposure on a fixed phased antenna array directional diagram main beam azimuth-elevation angle position, using the results of observations during previous accumulation intervals to increase the correct detection conditional probability.
Текст научной статьи Многоканальный алгоритм обнаружения интенсивно маневрирующих воздушных целей для импульсно-доплеровской бортовой радиолокационной станции, учитывающий априорную неопределённость частотной девиации сигнала
Как известно, для многофункционального истребителя задача по обнаружению воздушных целей (ВЦ), в том числе интенсивно маневрирующих, является первичной и весомо влияющей на исход предстоящего воздушного боя [1]. Некоторые существующие однопозиционные импульсно-доплеровские бортовые радиолокационные станции (ИД БРЛС) обладают рядом недостатков, обусловленных следующими особенностями решения ими задачи обнаружения. Использование нескольких n = 1,2,...,N частот повторения зондирующих импульсов F,(n) для устранения так называемых слепых зон, обусловленных бланкированием приемника на время излучения и для однозначного измерения дальности до ВЦ [2, 3], реализует согласованную обработку принимаемой пачки импульсов и принятие решения о её наличии или отсутствии за время каждого интервала её накопления (когерентного и (или) некогерентного). Объединение информации о результатах обработки сигналов за интервалы накопления на нескольких частотах повторения F,(n) при этом не производится. Это приводит к нерациональному рас- ходу энергетического ресурса станции, к потере потенциальной возможности использования результатов обработки сигналов за всё время облучения цели (все интервалы накопления на различных частотах повторения). Из работы [4] известно, что для устранения указанных недостатков в теории синтезированы алгоритмы обнаружения ВЦ для ИД БРЛС, отличающиеся от существующих использованием многоканальной корреляционно-фильтровой обработки с частой во времячастотной области сеткой, учитывающей априорную неопределенность по трем параметрам (частоте Доплера, времени задержки и длительности принимаемых импульсов), а также некогерентной обработки на основе метода отношения правдоподобия за несколько частот повторения F,(n) зондирующих импульсов. Однако данные алгоритмы не позволяют эффективно обнаруживать ВЦ, осуществляющие интенсивное маневрирование в условиях, при которых резко проявляются ракурсные зависимости как радиальной, так и тангенциальной составляющих вектора скорости ВЦ (при выполнении фигур высшего пилотажа, «зависания» её в воздухе, выполнения противоракетного манёвра, движения по касательной), особенно на малых дальностях.
По мере сближения истребителя с ВЦ, на которую он не наводится и находящейся на дальности R , тангенциальная составляющая скорости v τ растёт и, соответственно, увеличивается частотная девиация df /dt принимаемого на фиксированной длине волны X отраженного сигнала от ВЦ [5].
< = VL dt R X'
Это обстоятельство потребует увеличения размерности параметрического пространства и её учёта при создании дополнительной многоканальности путем введения в алгоритм обнаружения линейки ЛЧМ-фильтров, тем самым устраняя априорную неопределенность девиации частоты принимаемого сигнала и увеличивая степень согласованности его обработки. Этот сигнальный признак может быть использован в алгоритмах сопровождения и наведения для оценки угловой скорости линии визирования (по координатной информации измерений частотной девиации).
В [6-12] представлены различные варианты построения обнаружителей сигналов, отражённых от маневрирующих воздушных целей, показаны их недостатки и достоинства.
Учитывая указанные недостатки существующих однопозиционных ИД БРЛС по обнаружению интенсивно маневрирующих целей, предлагается аналогично [4] использовать многоканальную корреляционно-фильтровую обработку с частой времячастотной сеткой, но учитывающей априорную неопределенность уже по четырем параметрам (частоте Доплера, девиации частоты, времени задержки, длительности принимаемых импульсов), а также некогерентную обработку на основе метода отношения правдоподобия за несколько частот повторения F^nn зондирующих импульсов (т.е. за всё время облучения цели, используя при этом результаты наблюдений за время предыдущих интервалов накопления). Решить данную задачу позволит разрабатываемый алгоритм.
Цель работы - описание синтеза алгоритма обнаружения интенсивно маневрирующих воздушных целей для ИД БРЛС, устраняющего априорную неопределенность по времени задержки, длительности, частоте Доплера, девиации частоты принимаемого сигнала.
Синтез алгоритма осуществлен в такой последовательности:
-
1. Определение максимального значения отношения правдоподобия по информации с выходов частотно-временных каналов ИД БРЛС, вычисление решающей статистики l(N 1 ( Z(N 1) .
-
2. Получение закона распределения решающей статистики f ( Z(N ) .
-
3. Определение критической области критерия отношения правдоподобия по распределению решающей статистики f ( ZN ) путем нахождения значения порога V (N 1 , обеспечивающего заданную условную вероятность ошибки первого рода - условную вероятность ложной тревоги р лт .
Как известно [13], под обнаружением понимают процесс принятия решения о наличии или отсутствии цели в разрешаемом объеме за время наблюдения с требуемым качеством. Отраженный от интенсивно маневрирующей ВЦ квазинепрерывный сигнал на входе приемника ИД БРЛС в режиме высокой частоты повторения (ВЧП) представляет собой многомерную величину в пространстве своих параметров: угол места е, азимут в, наблюдаемое время за- ( n 1
держки 13\, 1 в пределах одного n-го периода однозначного измерения дальности, длительность принимаемых импульсов т(1, частота Доплера Рд, девиация частоты А/Д(у.) и, таким образом, на фиксированном за время наблюдения азимутально-угломестном положении главного луча диаграммы направленности (ДН) ФАР является пачкой из M1-n 1 линейно-частотно модулированных импульсов с параметром ц = 2nAfц / т(,n1, длительность тИ"1 которых на n-й частоте F" 1 повторения представляет собой кусочно-заданную функцию от наблюдаемого времени за-(n1/,(n 1х держки ТИ1(1Зн11 (2).
Со, 1 Зн1 = о_ или _ t зн1 = т ( " 1
ОО, t ( " 1 < т< " 1
-
и,и < 1 зн — Тбл
t ( " 1 _ ( " 1 ( " 1 _ to Лn 1< ( n 1 , ( n 1
-
1 зн тбл , т бл < 1 з н — тбл + Т и
- т(n1 _ ton1 ton1 ton1 т(n1
I T 1 з н , Тбл < 1 зн < T
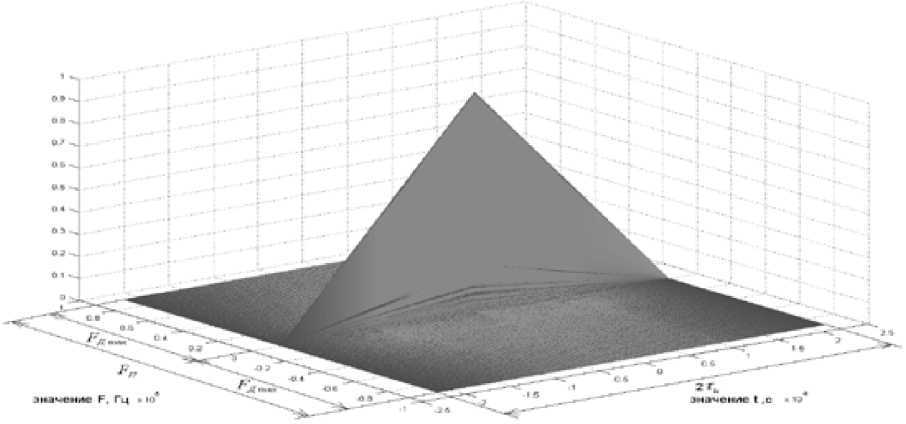
Ввиду отсутствия априорной информации о местоположении и скорости ВЦ объективно существует неопределенность этих параметров. Вид ограниченной области двумерной функции неопределенности (функции рассогласования) от рассогласования по времени и частоте при условиях, что девиация частоты Δ f Д = 0 и Δ f Д ≠ 0, показан на рис. 1 и 2 соответственно.
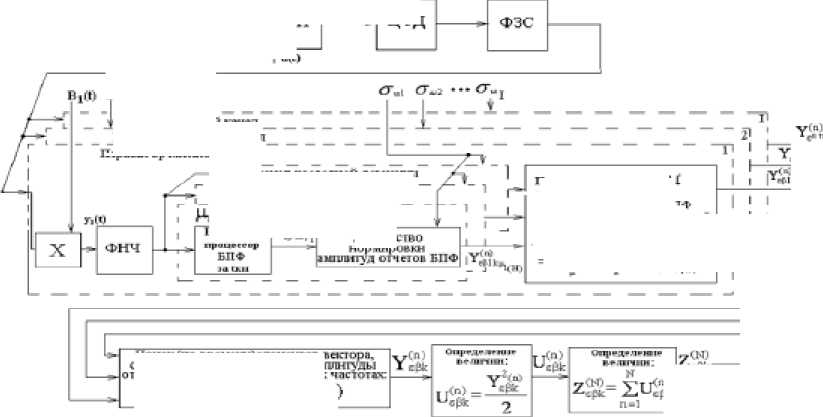
Для устранения неопределенности ожидаемых параметров принимаемого сигнала и тем самым увеличения степени согласованности его обработки предлагается в обнаружителе ИД БРЛС «нарезать» сетку по этой области пространства с заданными шагами по каждому из параметров: Ае, Ав, А T S , А Fft, т( " 1 , А { Д . Таким образом, устройство, реализующее согласованную обработку сигнала, должно быть многоканальным по каждому из его параметров.
При определении правила принятия решения об обнаружении используем схему обнару-д , р у р..
На фиксированной угломестной е и азимутальной в позиции главного луча приемной диаграммы направленности (ДН) фазированной антенной решетки (ФАР) на каждом n -м интервале накопления (при фиксированной частоте F ( n 1 повторения) на вход обнаружителя на промежуточной частоте поступает аддитивная смесь y ( n 1 ( 1 ) «сигнал+шум».
На рис. 4 в зоне однозначного измерения дальности изображено положение огибающей принимаемых импульсов у ( n 1( 1 ) (широкой пунктирной линией показана огибающая бланки-
леемеее*е F, Гц * io*
Рис. 1. Главный пик функции рассогласования пачки радиоимпульсов при А f = 0
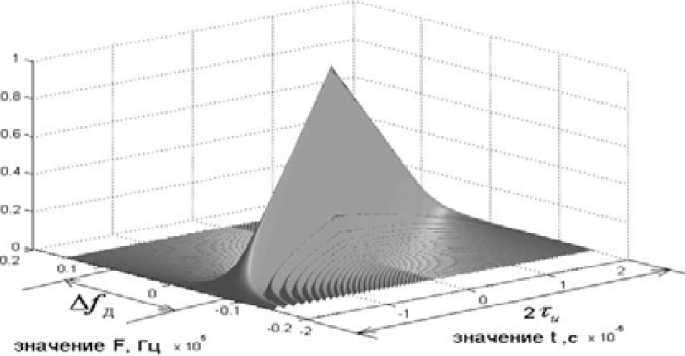
Рис. 2. Главный пик функции рассогласования пачки ЛЧМ-радиоимпульсов при Δ f Д ≠ 0
рованной части, широкой сплошной линией – огибающая небланкированной части импульса) и стробирующих импульсов B i ( t ), B 2 ( t ),... B I ( t ) временных каналов (обозначены узкой сплошной линией в пределах «зоны прозрачности») относительно «слепой зоны» (заштрихованная область) на каждой частоте F„ n ) повторения. Количество временных каналов I = Т п/А Ts - 1, где Т п - период повторения, А T s - шаг сетки по времени (для упрощения шаг А T s должен быть кратен периоду Т П ). Для примера: значение А T S = т и /2, I = 4, n = 1,2,3,4, дальность до ВЦ Д ВЦ = const, скважность Q и = 2.5. Работа схемы на этапе корреляционно-фильтровой обработки (до выходов цифровых процессоров быстрого преобразования Фурье (БПФ) за время t КН ) когерентного накопления) является классической.
Пусть в каждом разрешаемом объеме {е,в, i , к ,ц} на каждом n -м интервале когерентного накопления за время t кН ) амплитуды Y ^eni k p компонентов БПФ на выходе цифрового процессора БПФ в i -м канале дальности в µ -м канале частотной девиации на К -й частоте на фиксированной

.АЦП
Ц-ФД
Л ни
МО^М) _ - - i -
I I Л ИрСМСННОЛ Ю»П Второй врсменнойканал
Первый временной кжншх
^ Ц Kall ЬП ЧЙСТОПГОП ДСПЛЛЦШ1 Ц.. канал частотой девиации Кении чистотой JHBIIIIHI
О
*
Пс,р«г?1сс- yclpwftttap
00 ’ пт
Поиск) по времени l inenеигав в содфжашмд максимальные амг
Рис. 3. Схема обнаружителя для ИД БРЛС
№<Фр«1м.л Y^J,
УсгооЯс
НООМИ1К
Пшик н«'>кМ|»» кямяп» |Л ГП ЧОСТОПТОГ! ДСВНПЩШ.
СОДфаКШКГООТСЧС! Ы14-с ылкк1шаг№НпЛ amiiuinjon
- max К?? =
= max (max у )
<в1М_Я|
*111*10
™tB
---'Т( ^„^

угломестной е и азимутальной в позиции распределены по закону Рэлея-Райса и имеют плотность распределения:
Y ( n )
Р ( Y£k p ) = 4^ ехР ° Ep ik p
2 ^ Ep ik ц
2( n ) ,,2
Y eP ik p + a eP ik p
( n) ^ “ eP ik p Y E₽ ik p
^ EP ,k p
В каждом разрешаемом объеме {е,в,
i,к
,Ц} ИД БРЛС на каждом
n
-м интервале когерентного накопления необходимо проверить гипотезу
H
0
: а
ев
к
р
= 0 против альтернативы
H
,
: а
ев
к
р
+
0. Используем для этого метод отношения правдоподобия (ОП) (МОП) [14]. Учитывая, что безусловный максимум по параметру α
εβ
k
μ
функции правдоподобия случайных величин
У
Г1 р ( Y ,£’! « ., к = 0 ) П р ( Y У|« ., , = 0)
( N) ” =1 .” =1
l Ев k N Ml- cN • (4)
П max p (Y$ аЕ0к * 0) С п =1 аер к
Проведя некоторые преобразования с заменой переменной и прологарифмировав ОП, имеем:
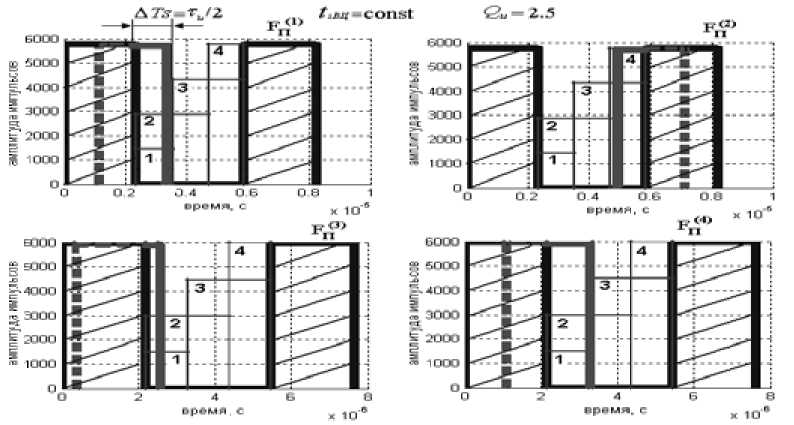
Рис. 4. Взаимное положение временных каналов и огибающих принимаемых импульсов в пачке на каждой ( n )
частоте F повторения относительно «слепой» зоны (зоны бланкирования) и зоны «прозрачности»
ln( l& ) ) = - Zgk ) - N ln( C ) ,
raeZ(n) = 71!^) = 0 5 N Y1)nl где Z Ep k ^ U Ep k 0 •5 ^ Y eP k - n=1
По известным правилам теории вероятности [15] найдем плотность распределения СВ Z N за N -интервалов когерентного накопления:
„ Y 2( n) Z ( n ) N -1
f (ZE(pN’) = f ( S UE(pnk) = f ( S '^k) = - e =Pk .(6)
n=1
Значение порога V^ ) , обеспечивающего заданный уровень вероятности ложной тревоги P лт , определяется из формулы
P = f(Z (N) )dZ (N = — V лт
ЛТ J’' ^ * e
V лт
( N - 1)!
N - 1
V лт
+—1— VTN -2+---+- V т2+ V т+1 лт лт лт
( N - 2)! 2!
-
При р .т = 10 -6 и значении N =4 порог V- =2Р3505.
Таким образом, теперь выборочное пространство W случайной величины Zv E„ k разделено соответствующим порогом V (j) на две области: 1) и - критическая область; 2) W - и - область принятия. Если наблюдаемая выборочная точка Z (4) > V ^^ то она попадает в область и и ги- (4) (4)
потеза, мы проверяли H 0 , отвергается; если же Z ^ < V л'т , то она попадает в область W - и и гипотеза H 0 принимается.
Решающая функция A * для разработанного алгоритма имеет вид
А
J0- npuZ'.N < V:N' <
I 1, npuZ .N ) ^ V лт )
Выводы
Таким образом, синтезирован алгоритм обнаружения интенсивно маневрирующих ВЦ для ИД БРЛС на основе метода отношения правдоподобия за несколько N интервалов когерентного накопления, устраняющего априорную неопределенность по времени задержки, длительности импульсов, частоте Доплера и девиации частоты. Предполагается, что применение разработанного алгоритма приведет к существенному увеличению условной вероятности правильного обнаружения интенсивно маневрирующих ВЦ, что в дальнейшем требует подтверждения результатами имитационного моделирования с использованием метода Монте-Карло.
