Многокритериальная система оптимизации систем электроприводов на базе синхронных и асинхронных электроприводов

Автор: Савостеенко Н.В., Максимов Н.М., Кушнарв В.А., Сивкова А.П.
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электротехнические комплексы и системы
Статья в выпуске: 1 т.24, 2024 года.
Бесплатный доступ
В статье рассматривается использование энергоэффективного электрического привода. Актуальностью предлагаемого решения проблемы является увеличение спроса на энергоэффективное оборудование в промышленности ввиду роста требования к качеству выпускаемой продукции и скорости ее изготовления. Таким образом, основной задачей является увеличение быстродействия переходных процессов переменных систем в режиме рекуперации, снижение коммутационных потерь, оценка максимально возможных и допустимых перенапряжений в звене постоянного тока и проведение параметрической оптимизации по критерию оптимального количества фаз многоуровневого преобразователя на базе синхронных и асинхронных электродвигателей. На примере трубопрокатного стана 5000 (ПАО «Магнитогорский металлургический комбинат») и универсального рельсобалочного стана (ПАО «ЧМК», г. Челябинск) произведено исследование работы многоуровневого преобразователя частоты, вместо существующих автономных инверторов напряжения. В результате работы выявлено снижение перенапряжения на силовых ключах; методом экспериментальных тепловых исследований коммутационные потери снизились на 25-45 % в зависимости от номинальной мощности; с помощью применения трехуровневого выпрямителя сохраняется интенсивность торможения, что, в свою очередь, в общем цикле позволяет снизить время тормозных режимов на 2-5 %. Далее проведено исследование оптимального числа фаз полупроводникового преобразователя для объектов металлургического производства по критерию максимума вероятности безотказной работы.
Электромеханические преобразователи, оптимизация, математическая модель, асинхронный и синхронный электродвигатели, многоуровневый преобразователь
Короткий адрес: https://sciup.org/147243012
IDR: 147243012 | УДК: 68-83 | DOI: 10.14529/power240104
Multi-criteria optimization system for electric drive systems based on synchronous reluctance and induction motors
The article discusses the use of an energy-efficient electric drive. The proposed solution to the problem is highly relevant due to the increase in demand for energy-efficient equipment in industry due to the growing requirements for the quality of products and the speed of their production. Thus, the main objective is to increase the speed of transient processes of variable systems in regeneration mode, reduce switching losses, assess the maximum possible and permissible overvoltages in the DC link and carry out parametric optimization according to the criterion of the optimal number of phases of a multi-level converter based on synchronous and asynchronous electric motors. Using the example of a pipe rolling mill 5000 (Magnitogorsk Metallurgical Plant PJSC) and a universal rail and beam mill (ChMK PJSC, Chelyabinsk), the article studies the operation of a multi-level frequency converter, instead of existing autonomous voltage inverters. As a result of the study, a decrease in overvoltage on power switches was revealed. Using experimental thermal studies, switching losses were reduced by 25-45 % depending on the rated power. Using a three-level rectifier, the intensity of braking is maintained, which in turn, in the overall cycle, allows reducing the time of braking modes by 2-5 %. The article also considers further research on the optimal number of phases of a semiconductor converter for metallurgical production facilities according to the criterion of maximum probability of failure-free operation.
Текст научной статьи Многокритериальная система оптимизации систем электроприводов на базе синхронных и асинхронных электроприводов
Начиная с конца 1970-х годов началось создание основ теории электрических машин нетрадиционных конструкций, таких как шаговые электродвигатели, вентильно-индукторные, реактивные и другие [1, 2]. За последние десятилетия уровень развития силовых электронных компонентов существенно вырос, что позволило перейти к внедрению в промышленность многоуровневых преобразователей переменного тока, работающих на высоком напряжении, для питания мощных электрических машин.
В преобразовательной технике известны топологии многокаскадных или трехуровневых преобразователей частоты, это специальные конфигурации, обеспечивающие энергоэффективную работу полупроводниковых преобразователей с малой несущей частотой, не превышающей 300 Гц, в данном случае классическая топология электрического преобразователя неуместна в связи с сильным искажением выходного напряжения. Классическая топология преобразователей частоты позволяет развивать высокую несущую частоту (до 16 кГц), это уместно в случае использования преобразователя в питающей сети с малой величиной напряжения, так как в этом случае удается достичь наилучшей формы выходного тока. На практике высокое питающее напряжение приводит к завышенным электрическим потерям и высокой вероятности возникновения перенапряжения в электрической цепи. Таким образом, при эксплуатации высоковольтных полупроводниковых преобразователей необходимо снизить влияние негативных эффектов, лучшим решением в этом случае является ограничение верхней границы несущей частоты на величине 1 кГц.
В качестве технических объектов обратимся к металлургической промышленности. Так, к примеру, в качестве приводных двигателей механизмов на трубопрокатном стане 5000 (ПАО «Магни- тогорский металлургический комбинат») применяются энергоэффективные электроприводы на базе мощных высоковольтных синхронных электрических машин с многоуровневыми преобразователями, которые имеют частотнотоковую систему управления
На рис. 1 приведены осциллограммы работы электропривода. Осциллограммы отображают следующие процессы: разгон электропривода до рабочей скорости (1); электромагнитный момент, который отражает процессы изменения скорости и приложение момента нагрузки (2), когда происходит подача заготовки в валки, при этом стоит отметить, что скорость электродвигателя (1) остается неизменной; увеличение скорости (1) электродвигателя с незначительным снижением момента (2), что необходимо из-за удлинения заготовки в процессе прокатки для поддержания производительности стана; торможение двигателя, когда процесс прокатки закончен и необходимо снизить скорость вращения до нуля; для выравнивания заготовки линейными манипуляторами после прохода необходимо реверсировать электрический привод, после чего начинается новый цикл.
Рассмотрим работу преобразователя частоты с учетом рассмотренных выше нагрузочных диаграмм электропривода: на участке разгона электродвигателя полупроводниковый преобразователь работает в легком режиме работы, так как нагрузка на двигатель не достигает 50 %; в процессе прокатки заготовки в связи с увеличением нагрузки на электропривод значение фазного напряжения увеличивается вплоть до максимального значения. В преобразователе частоты при работе электропривода с установившейся скоростью можно снизить коммутационные потери, что достигается введением ступенчатой амплитудной модуляции сигнала.
На следующем участке, где происходит процесс снижения скорости электродвигателя вплоть
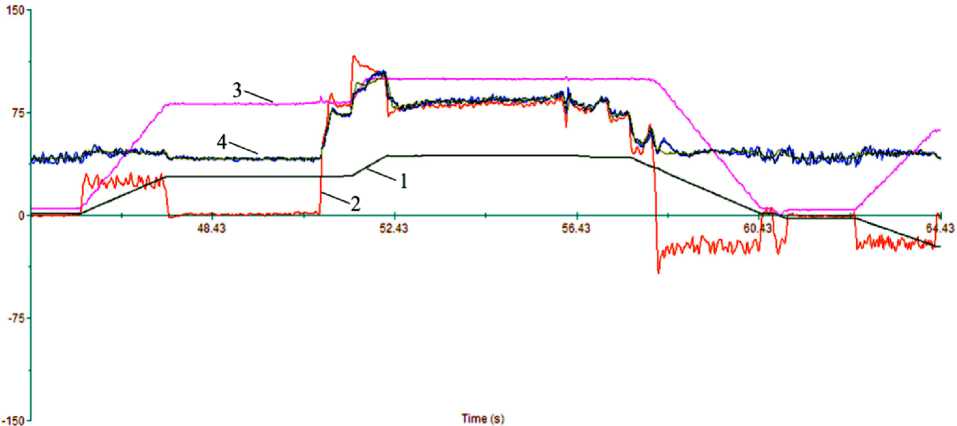
Рис. 1. Графики переходных процессов: скорости электродвигателя (1), электромагнитного момента двигателя (2), фазного напряжения (3) и тока возбуждения (4) в электроприводе обжимной клети универсального рельсобалочного стана [3]
Fig. 1. Graphs of transient processes: electric motor speed (1), electromagnetic torque of the motor (2), phase voltage (3) and excitation current (4) in the electric drive of the crimping stand of a universal rail-beam mill [3]
до полной остановки с последующим изменением направления вращения, запасенная кинетическая энергия, которая определяется маховыми массами вала и динамикой изменения его скорости, возвращается в питающую сеть. Необходимо отметить, что изменение режима работы электропривода может привести к всплеску напряжения в звене постоянного напряжения. Вкупе с высоким быстродействием контура скорости это может привести к срабатыванию защиты преобразователя по перенапряжению. На практике в активных выпрямителях с многоуровневой топологией контур регулирования напряжения в звене постоянного тока существенно быстрее по сравнению с контуром скорости [1].
Вышеописанные особенности работы полупроводниковых преобразователей позволяют определить задачи, решение которых даст обоснование их применения в технических объектах. Во-первых, необходимо провести оценку максимально возможных и допустимых перенапряжений в звене постоянного тока, при приложении нагрузки; во-вторых, необходимо провести расчеты потерь в электронных полупроводниковых компонентах; в-третьих, провести параметрическую оптимизацию по критерию оптимального количества фаз.
Сравнительный анализ двух-и трехуровневых низковольтных преобразователей частоты
Производительность технических объектов можно увеличить на 20 % лишь при незначительном повышении частоты вращения электропривода на 10 %, это обуславливается квадратичной зависимостью производительности от частоты вращения приводного двигателя, следовательно, необходимо рассмотреть возможные варианты расширения диапазона регулирования скорости двигателя. Во-первых, самым простым решением является увеличение запаса выходного напряжения преобразователя, во-вторых, увеличение скорости
a) b)
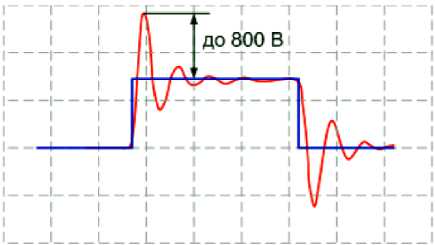
Рис. 2. Переходные процессы выходного напряжения на нагрузке: а) двухуровневая схема; b) трёхуровневая схема включения силовых цепей
Fig. 2. Transient processes of output voltage at the load: a) two-level circuit; b) three-level circuit for connecting power circuits возможно за счет уменьшения магнитного потока путем снижения протекающего тока в обмотках возбуждения, что достигается настройкой системы управления электропривода.
Как было отмечено выше, низковольтные трехуровневые полупроводниковые преобразователи могут обеспечить запас выходного напряжения, это обусловлено гибридной модуляцией (комбинирование широтно-импульсной и амплитудной модуляций) (рис. 2) при коммутировании полупроводниковых элементов. Стоит отметить, что в идеальном случае, когда не учитывается динамика изменения выходного напряжения на вентиле, перенапряжение на силовых ключах снижается в 2 раза, однако реальные схемы требуют применения сложной пространственно векторной модуляции, что снижает максимальное выходное напряжение преобразователя частоты до 10–15 %, а допустимый безопасный уровень увеличения выходного напряжения составляет не более 5 % от номинального значения.
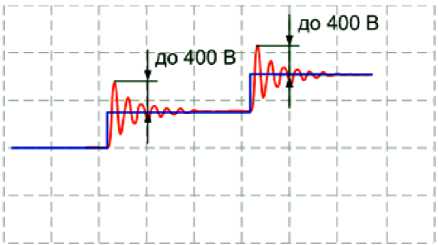
Однако современные методы управления электроприводом позволяют расширить зону ограничения по напряжению. Это становится возможным, если обратиться к векторной диаграмме расположения векторов потокосцепления статора и ротора (рис. 3), здесь предлагается изменение жестко принятого прямого угла между векторами.
а)
b)
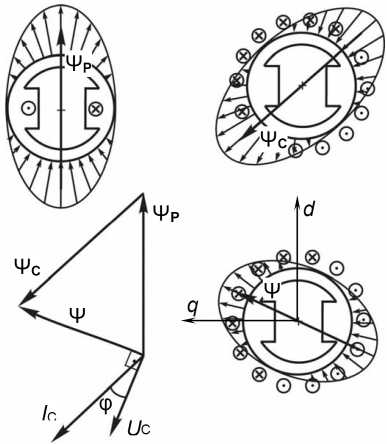
Рис. 3. Пространственное распределение токов (а) и векторные диаграммы (b) в синхронном электроприводе
Fig. 3. Spatial distribution of currents (a) and vector diagrams (b) in a synchronous electric drive
В случае поддержания наименьшего значения угла ϕ, как видно из векторной диаграммы, строгая ортогональность между векторами потокосцепле-ний статора ΨС и ротора ΨР нарушается, угол между ними становится острее, что приводит к уменьшению длины вектора напряжения, а при нулевом значении угла ϕ амплитуда вектора напряжения UС достигнет минимального значения. На практике в мощных синхронных электрических машинах угол ϕ возможно изменять не более чем на 4 %, так как при проектировании двигателя значение коэффициента мощности получается 0,96, что обеспечивает соответствующий запас по напряжению.
Для оценки энергоэффективности и расчета потерь в преобразователях был принят следующий алгоритм: на первом этапе проводился расчет действующих и средних значений напряжений и токов в фазах; далее определяется закон коммутации ключей, который зависит от алгоритма управления полупроводниками, в данном случае удобнее был алгоритм пространственно-векторной модуляции; используя численные методы расчетов, определяют потери, обусловленные статическими и динамическими режимами работы; на последнем этапе производят сравнительный анализ расчетов и данных с реального оборудования для получения более точных оценок потерь.
Используя вышеописанный алгоритм, получили следующее. Без учета экспериментальных данных было рассчитано, что потери, возникающие при коммутации вентилей, снижаются в 2 раза, однако учет динамических и тепловых особенностей при переключении силовых ключей показал, что в реальных преобразователях величина потерь на коммутации снижается не более чем на 30 % для мощностей в 500 кВт и не более 45 % для преобразователей мощностью 1200 кВт [3–6]. Следовательно, можно заключить, что многоуровневые преобразователи частоты, рассчитанные на низкие напряжения, при тех же значениях мощности выделяют меньшее количество тепла, что позволяет уменьшить охлаждающую систему или же перейти от менее надежных систем жидкостного охлаждения к более живучим воздушным системам.
К системе управления электропривода обжимной клети предъявляются серьезные требования для обеспечения необходимого качества прокатки изделий, к примеру во время всего технологического процесса требуется поддерживать величину скорости вращения валков неизменной, как правило, это достигается за счет настройки контура регулирования скоростью на максимально возможное быстродействие (частота среза не менее 60 рад/с). На участке, где происходит процесс торможения электродвигателя с последующим изменением направления вращения, запасенная кинетическая энергия, которая определяется маховыми массами вала и динамикой изменения его скорости, возвращается в питающую сеть посредством активного выпрямителя. Высокое быстродействие контура скорости и изменение знака сигнала задания по скорости приводит к броскам напряжения в звене постоянного тока, что вызывает перенапряжение в цепи, причем ограничение динамики торможения по рекуперативному току даже на 50 % от номинала не избавляет от высокого уровня значения напряжения (см. рис. 1, кривая 2).
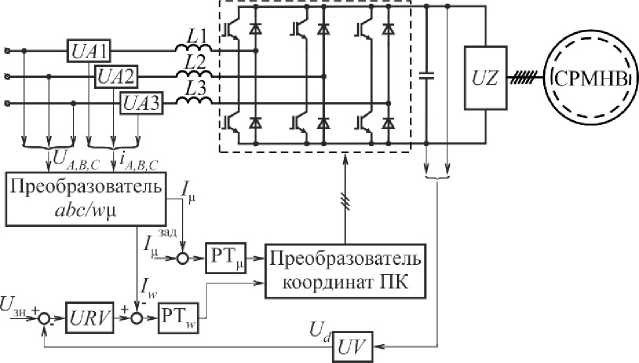
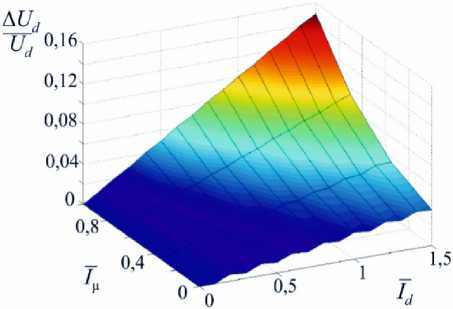
Рис. 4. Схема электропривода с активным выпрямителем (а) и функция перенапряжения Δ Ud / Ud от составляющих фазного тока питающей сети Id , I µ (b)
Fig. 4. Circuit diagram of an electric drive with an active rectifier (a) and the overvoltage function Δ Ud / Ud from the components of the phase current of the supply network Id , I µ (b)
Современные системы управления электроприводами позволяют решить данную проблему подстройкой контура регулирования напряжения в звене постоянного тока по критерию максимального быстродействия.
Для оценки величины перенапряжений в активных выпрямителях была построена функциональная схема электропривода с подчиненной системой управления (рис. 4а). В схеме в качестве внутреннего был взят контур регулирования активной части фазного тока, который, в свою очередь, охвачен внешним контуром регулирования напряжения в звене постоянного тока [1], в схеме учитывается возможность преобразователя корректировать мощность за счет изменения реактивной составляющей I µ фазного тока сети. Для оценки величин перенапряжений были взяты двухуровневая и трехуровневая топологии активных выпрямителей.
По результатам моделирования был построен трехмерный график зависимости величины перенапряжения в звене постоянного тока от величин активной и реактивной составляющей фазного тока сети активного выпрямителя с двухуровневой топологией (рис. 4b). Расчеты показали, что максимальный бросок напряжения ΔUd / Ud составил 20 % от номинального значения.
При расчете величины перенапряжений активного выпрямителя на базе трехуровневой топологии было выявлено, что максимальный бросок напряжения составил не более 8 %, это обусловлено комбинированием алгоритмов управления силовыми полупроводниковыми ключами.
Оценка графиков переходных процессов при работе обжимного стана (см. рис. 1) с учетом внедрения трехуровневого выпрямителя дает увеличение производительности стана на 5 %, за счет сокращения времени торможения, что стало возможно благодаря снижению потерь в выпрямителе.
Определение оптимального количества фаз полупроводникового преобразователя частоты
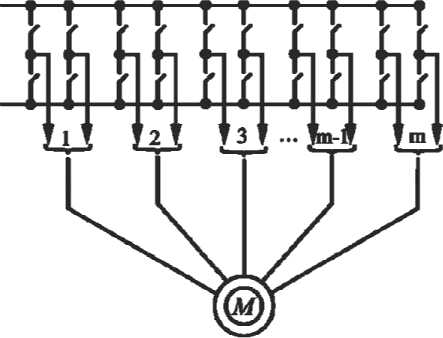
При варьировании количества фаз величина полупроводниковых элементов не изменяется, однако увеличение количества питающих фаз m снижает ток, протекающий в фазах, что существенно
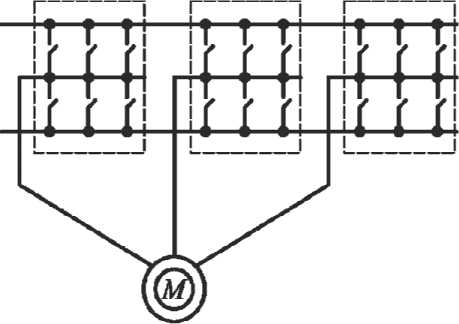
Рис. 5. Схемы силовых цепей электропривода при трехфазном (а) и многофазном (b) исполнении схем силовых цепей
Fig. 5. Electric drive power circuit diagrams for three-phase (a) and multi-phase (b) design of power circuit diagrams
b)
повышает надежность работы системы не только за счет снижения тока, но и резервирования.
Технологические объекты металлургическ о го производства являются ответственными мех а низмами, так как небольшое время простоя на данном производ стве может стоить миллионы рублей. Таким образом, вопрос надежности эле к трооборудования в данной промышленности ст о ит очень остро. Здесь предлагается пересмотреть подход к проектированию классических схем с и ловых цепей и отойти от стандартной трехфазной сх емы включения к многофазной (рис. 5) как для электрических машин, так и для полупроводн и ковых преобразователей, это позволит сущес т венно увеличить надежность работы систем без изменения важнейших эксплуатационных показ ателей.
Как показали расчеты, для электропривода обжимного стана установленной мощности 4500 кВт наилучшее использование полупроводниковых ключей соблюдается при m > 6, при этом вероят- ность безотказной работы системы увеличивалась с 0,9 до 0,94 [3].
Выводы
В ходе проделанной работы с помощью предложенной методики оценки потерь установлено, что применение в активных выпрямителях трехуровневых мостовых инверторов (выпрямителей) позволяет увеличить быстродействие переходных процессов переменных системы в режиме рекуперации и обусловлено это сниженным уровнем коммутационных перенапряжений
Разработана методика выбора оптимального количества фаз полупроводниковых многоуровневых низковольтных преобразователей частоты для объектов металлургического производства по критерию максимума вероятности безотказной работы.
Общая производительность обжимной клети может быть увеличена примерно на 15–20 % при выборе низковольтного трехуровневого преобразователя частоты.
Список литературы Многокритериальная система оптимизации систем электроприводов на базе синхронных и асинхронных электроприводов
- Magureanu R., Vasile N. Magnetic field and steady-state parameters of flux barrier reluctance synchronous motors // Revue Roumaine des Sciences Techniques. Série Électrotechnique et Énergétique. 1979. Vol. 24, no. 3. P. 465-477.
- Lipo T.A. Performance Calculations of a Reluctance Motor Drive by dq Harmonlc Balance // IEEE Transactions on Industry Applications. 1979. Vol. IA-15, no. 1. P. 25-35. DOI: 10.1109/TIA.1979.4503609
- Чупин Е.С., Григорьев М.А. Высокоэффективные многоуровневые преобразователи частоты объектов металлургического производства // Электротехника. 2019. № 5. С. 21-26. EDN: ZIMNXF
- Розанов Ю.К., Лепанов М.Г. Силовая электроника: учеб. и практикум для академ. бакалавриата / под ред. Ю.К. Розанова. М.: Юрайт, 2017. 206 с. (Бакалавр. Академический курс).
- Федяков В.В., Кушнарев В.А., Григорьев М.А. Оптимизация систем управления полупроводниковыми преобразователями частоты для объектов цветной металлургии // Электротехника. 2021. № 5. С. 29-33. EDN: HHURVW
- Домахин Е.А., Котин Д.А. Алгоритм синхронизации для безударного переключения асинхронного двигателя между преобразователем частоты и питающей сетью // Электротехника. 2021. № 6. С. 25-31. EDN: QTOAUQ
