МНОГОМОДОВЫЙ СКАНИРУЮЩИЙ МИКРОСКОП ИОННОЙ ПРОВОДИМОСТИ С СИСТЕМОЙ ПЬЕЗОИНЕРЦИАЛЬНОГО ПЕРЕМЕЩЕНИЯ

Автор: М. В. Жуков, С. Ю. Лукашенко, И. Д. Сапожников, М. Л. Фельштын, О. М. Горбенко, С. В. Пичахчи, А. О. Голубок
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Разработка приборов и систем
Статья в выпуске: 4 т.32, 2022 года.
Бесплатный доступ
Разработан сканирующий микроскоп ионной проводимости (СМИП) с системой пьезоинерциального перемещения, работающий в нескольких модах: режиме постоянного тока, режиме модуляции тока и прыжковом режиме (hopping). Созданы и протестированы нанозонды в виде стеклянных нанопипеток с внутренним радиусом r ~ 50 нм. Измерены вольт-амперные характеристики I(V) и зависимости тока от расстояния между зондом и образцом I(z) (кривые подвода/отвода). Получены изображения полимерного тестового объекта с периодической структурой и биологического объекта (CHO клетка), проведена оценка их качества, обсуждаются особенности работы СМИП в различных режимах. Многомодовый СМИП обеспечивает неразрушающую бесконтактную визуализацию мягких объектов в жидкой проводящей среде с нанометровым пространственным разрешением в различных измерительных режимах и может быть использован в биологии, цитологии, электрохимии и медицине при изучении неорганических мягких объектов, биологических объектов в буферных средах и т.п.
Сканирующая зондовая микроскопия, сканирующий микроскоп ионной проводимости, нанопипетка, зонд, электролит, ионная проводимость
Короткий адрес: https://sciup.org/142235507
IDR: 142235507 | УДК: 53.084.2 + 53.086 + 621.3.035.223.65 | DOI: 10.18358/np-32-4-i6887
MULTIMODE SCANNING ION CONDUCTION MICROSCOPE WITH PIEZO-INERTIAL MOVING SYSTEM
A scanning ion conductivity microscope (IDS) has been developed, operating in several modes: DC mode, current modulation mode and hopping mode. It is built with a piezoinertial movement system, nanosonds in the form of glass nanopipettes have been created and tested with an internal radius of r ~ 50 nm. Volt-ampere characteristics I (V) and current dependence on the distance between the probe and the sample I (z) (input/output curves) were measured. Images of a polymer test object with a periodic structure and a biological object (CHO cell) were obtained, their quality was assessed, the features of the SMIP operation in various modes are discussed. Multimode SMIP provides non-destructive non-contact visualization of soft objects in a liquid conducting medium with nanometer spatial resolution in various measuring modes and can be used in biology, cytology, electrochemistry and medicine when studying inorganic soft objects, biological objects in buffer media, etc.
Текст научной статьи МНОГОМОДОВЫЙ СКАНИРУЮЩИЙ МИКРОСКОП ИОННОЙ ПРОВОДИМОСТИ С СИСТЕМОЙ ПЬЕЗОИНЕРЦИАЛЬНОГО ПЕРЕМЕЩЕНИЯ
Сканирующая микроскопия ионной проводимости (СМИП) является одной из разновидностей сканирующей зондовой микроскопии (СЗМ), когда в качестве зонда используется стеклянная нанопипетка (НП) с радиусом внутренней апертуры ~ 50– 100 нм. СМИП была предложена в 1989 г. Полом Хансма [1] и нашла широкое применение в цитологии [2], электрохимии [3], а также микро- и на-норазмерной модификации поверхности [4]. Для более точного выбора места на образце СМИП обычно совмещают с оптической микроскопией. Интересно также сочетание СМИП с атомносиловой микроскопией (АСМ) [5, 6]. В СМИП образец закрепляется на дне чашечки Петри, заполненной, как и пипетка, раствором NaCl. Внутри пипетки и чашки Петри размещены хлорсеребряные электроды, один из которых заземлен, а к другому приложено напряжение. В СМИП измеряется величина ионного тока, протекающего через пипетку между AgCl-электродами в процессе механического сканирования зондом относительно образца или образцом относительно зонда. В основе работы СМИП, как и в основе работы всех приборов СЗМ, лежит зависимость от расстояния между зондом и образцом с той разницей, что, в отличие от всех остальных типов СЗМ, в СМИП величина сигнала уменьшается при уменьшении зазора между зондом и исследуемой поверхностью, а не увеличивается. Ионный ток трансформируется на поверхности AgCl-электродов в электронный ток, преобразуется с помощью преобразователя ток-напряжение (ПТН) в электрическое напряжение и подается на вход следящей системы (СС), которая с помощью петли обратной связи (ОС) регулирует положение зонда над поверхностью образца в процессе прецизионного механического сканирования.
При использовании СМИП различают три основных режима сканирования: режим постоянного тока (DC) [1], режим переменного тока (AC) [7] и режим последовательных циклов подвода-отвода, также известный в зарубежной литературе как "hopping" [8].
В режиме постоянного тока система слежения поддерживает постоянное значение ионного тока, протекающего через кончик нанопипетки, непрерывно корректируя координату сканера по оси Z. В режиме DC ионный ток увеличивается при удалении от поверхности и уменьшается при приближении к поверхности образца. На расстоянии до образца, превышающем радиус НП, система регистрирует ток насыщения Isat, который ограничен только апертурой и сопротивлением самой НП. При выборе рабочего тока обычно устанавли- вается значение, на ~(0.1–10)% меньшее, чем ток насыщения. Для режима постоянного тока характерна более низкая чувствительность по сравнению с другими методиками сканирования. Это связано с тем, что стабильная работа в режиме DC достигается только тогда, когда кончик НП удален достаточно далеко от исследуемой поверхности на расстояние, сравнимое с размером ее апертуры [8]. На таких расстояниях крутизна наклона рабочей области на кривой подвода невелика, что снижает чувствительность и пространственное разрешение метода.
Быстродействие системы слежения зависит от коэффициента передачи петли обратной связи, в которую входит передаточная функция СМИП-контакта. В случае DC-режима она определяется крутизной зависимости ионного тока от расстояния между НП и образцом. В DC-режиме рабочая точка на кривой подвода располагается в области I ~ 0.1∙ I sat , где наблюдается изменение крутизны на зависимости I ( z ), поэтому обратная связь работает в нелинейном режиме, что приводит к фазовым искажениям и разной скорости отработки впадин и выступов на поверхности. При этом может возникать потеря контакта, залипание НП в мягком образце либо поломка стеклянной НП на твердых участках. Это обычно происходит при сканировании в течение длительных периодов времени. Исходя из этих особенностей, в DC-режиме преимущественно измеряют мягкие образцы с достаточно гладким рельефом поверхности.
Кроме того, режим DC очень восприимчив к дрейфам электрохимического потенциала на хлорсеребряных электродах, это приводит к нестабильности ионного тока и электронному шуму, что ограничивает эффективность этого режима. Также этот метод оказывается очень нестабильным при температурных флуктуациях. На качество изображений в режиме постоянного тока могут влиять нелинейность проводимости и концентрирование ионов одного знака вблизи выходного отверстия пипетки [9]. Зарядка вершины пипетки в процессе сканирования [10] может стать причиной скачков ионного тока. Кроме того, отклик зонда при сканировании может зависеть как от изменения расстояния между торцом пипетки и исследуемой поверхностью, так и от локальной ионной активности, что осложняет задачу интерпретации результатов измерений.
В СМИП используются два способа работы в режиме переменного тока: за счет модуляции зазора в направлении оси Z или напряжения смещения, при этом выделяется переменный ток Iас, возникающий на частоте модуляции. Амплитуда переменного тока используется в качестве входного сигнала СС и поддерживается постоянной в процессе сканирования. При модуляции зазора амплитуда переменного тока пропорциональна производной dI(z)/dz, что делает этот режим более чувствительным к изменению рельефа поверхности. При модуляции напряжения смещения амплитуда переменной составляющей в токе пропорциональна производной dI(V)/dV, т.е. обратно пропорциональна сопротивлению СМИП-контакта, и уменьшается по мере сближения НП с поверхностью образца. При подключении СС следует учитывать, что в первом случае модуляции тока амплитуда переменной составляющей сигнала увеличивается при сближении НП с образцом, а во втором — уменьшается. Преимуществом режима переменного тока с модуляцией напряжения смещения является возможность работы с нулевым значением постоянного смещения, минимизируя электрическое воздействие на исследуемый объект, что особенно важно для нативных клеток.
Также AC-режим практически не зависит от дрейфов электрохимического потенциала на электродах, т.к. амплитуда модулированного сигнала не зависит от тока насыщения, и возникает только на расстояниях порядка радиуса нанопипетки.
Было установлено, что в режиме переменного тока сигнал намного более стабилен [7] и более чувствителен к положению нанопипетки вблизи поверхности по сравнению с откликом в режиме постоянного тока. В [11] представлен режим переменного тока c модуляцией напряжения, когда для устранения "емкостного эффекта" при зарядке пипетки осуществлялась компенсация емкости. В [12] рассмотрен режим, в котором с помощью синхродетектирования выделяется как резистивная, так и емкостная составляющие ионного тока и СС поддерживает постоянной амплитуду резистивной составляющей тока, осциллирующего в фазе с приложенным к AgCl-электродам переменным напряжением. Этот режим по сравнению с режимом постоянного тока менее чувствителен к электронному шуму и дрейфу, обусловленному электрохимическими реакциями, протекающими на электродах, поскольку направление химических реакций периодически меняется на противоположное, что увеличивает время сохранности AgCl-слоя на поверхности Ag. Однако режим модуляции ионного тока через модуляцию напряжения смещения все же дает низкое качество изображений при сканировании образцов с развитым рельефом поверхности.
Все рассмотренные выше режимы СМИП основаны на единообразном алгоритме измерений при непрерывной работе СС в процессе сканирования. Наибольшую стабильность демонстрирует режим последовательных циклов подвода-отвода [8] со следующим алгоритмом:
– НП, имеющая латеральные координаты ( X 1, Y 1), отводится вдоль координаты Z на исходное положение вдали от образца при I = I sat ;
– выставляется рабочее значение опорного тока, например I = 0.1∙ I sat, включается сближение НП с образцом и с помощью СС захватывается ионный ток вблизи поверхности, равный опорному значению, запоминается координата Z 1 положения сканера;
– НП отводится на исходное положение I = I sat и перемещается в следующую точку ( X 1, Y 1), цикл повторяется.
В режиме "hopping" обратная связь может работать как в режиме постоянного тока, так и в режиме переменного тока. Эта техника обходит недостатки, связанные с DC- и AC-режимами и позволяет визуализировать изображения образцов с развитым рельефом с высоким пространственным разрешением.
Тем не менее прыжковый режим также имеет недостатки, связанные с низкой скоростью визуализации из-за постоянного перемещения пипетки вверх-вниз [13, 14]. Увеличить скорости сканирования можно несколькими путями. Один из подходов предполагает уменьшение числа пикселей при сканировании за счет предварительного быстрого сканирования и дискретизации процесса сканирования на основе "сжатого" зондирования [15], что повышает скорость получения изображений, но негативно влияет на качество изображения. В частности, предварительное сканирование не подходит для сложных или шероховатых поверхностей. Второй подход укорачивает время визуализации уменьшением ненужного движения зонда за счет предсказания высоты в следующей точке изображения. Гибридное сканирование, сочетающее в себе режим постоянного тока и "hopping", может дать изображение с высоким разрешением за короткое время при использовании предсказания высоты в следующей точке изображения [16]. Однако в случае сильно шероховатых поверхностей эти методы все еще могут привести к столкновению пипетки с поверхностью образца. Третий подход основан на увеличении скорости работы пипетки в Z-направлении за счет уменьшения времени отклика пьезопривода на входной сигнал путем улучшения механических свойств пьезопривода [17], повышения его собственной резонансной частоты [18] или с помощью передовых алгоритмов управления [19]. Известны также решения, когда пипетка располагается под углом к исследуемой поверхности [20], что позволяет визуализировать микро- и наноструктуры с резкими боковыми стенками. Наконец отметим, что для адекватной интерпретации получаемых СМИП- изображений необходимо правильно понимать физико-химические процессы, определяющие природу СМИП-изображений. Таким образом, важным разделом СМИП является компьютерное моделирование распределения плотности тока в отверстии пипетки и в области контакта с образцом [21].
В данной работе представлена многомодовая измерительная головка прибора СМИП. В предлагаемой конструкции, с целью улучшения ее компактности, увеличения частоты механического резонанса и повышения стабильности процесса подвода и сканирования, используется пьезодвижитель, в котором с помощью одного пьезопакета осуществляется как пошаговое "пьезоинерциальное" перемещение образца для захвата ионного тока перед началом сканирования, так и плавное перемещение для стабилизации СМИП-сигнала в процессе сканирования. В работе описана технология изготовления зондов в виде стеклянных нанокапилляров и представлены их микроскопические изображения, а также представлены и обсуждаются тестовые СМИП-изображения, полученные в различных режимах измерения.
ОПИСАНИЕ УСТАНОВКИ И МЕТОДЫ ИССЛЕДОВАНИЯ
В качестве зондов использовались нанопипетки (НП) из боросиликатного стекла, формируемые на установке по вытягиванию пипеток PMP-107 (Micro Data Instrument Inc., США) с помощью теплового плавления и разрыва стеклянных капилляров с исходным внешним диаметром ~1.2 мм и внутренним диаметром ~0.6 мм. Использовались "hand-made" измерительная головка СМИП и блок управления/сбора данных. Измерительная головка располагалась на столе с активной виброзащитой Halcyonics Nano-20 (Accurion GmbH, Германия). Для контроля качества пипеток использовался сканирующий электронный микроскоп (СЭМ) Inspect (FEI, США). После подбора оптимальных параметров тепловой вытяжки боросиликатных заготовок минимальный внутренний радиус вершины пипетки составил ~50 нм с углом заострения вершины ~3–5° (рис. 1).
В качестве электродов использовались хлорированные нити серебра AgCl, а в качестве буфера водный физиологический раствор 0.9% масс. NaCl. Для снижения акустических шумов, тепловых дрейфов и электромагнитных наводок использовался защитный заземленный колпак. Измерения проводились при температуре около 21 °С и влажности около 30–40%.
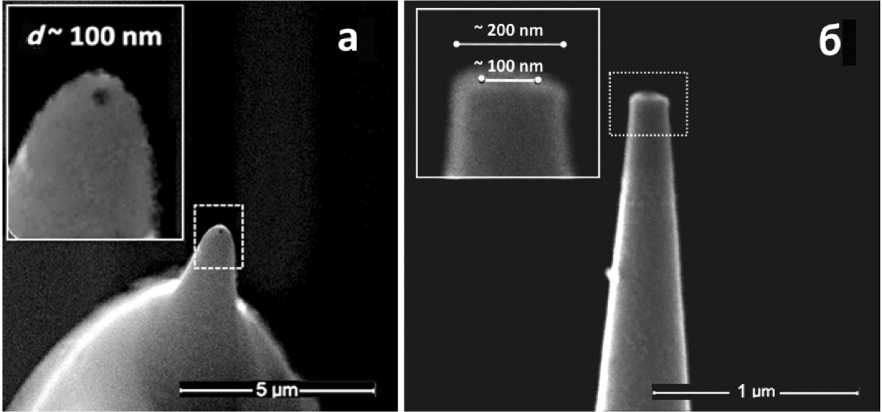
Рис. 1. Изображения НП в СЭМ. а — вид в изометрии, б — вид сбоку
Следует отметить, что оценивать внутренний радиус пипетки можно не только прямым измерением в СЭМ, но также и косвенным измерением через проводимость пипетки в проводящем растворе по данным вольт-амперных характеристик (ВАХ) [22] (рис. 2, а). Так, зная сопротивление и угол заострения НП, можно оценить ее эффективный радиус по формуле (1):
R p =-----Ч---, (!)
п • о • т- • tan а где σ — электропроводность, r — внутренний радиус пипетки, α — угол при вершине пипетки.
Расчетный и измеренный радиусы НП имеют хорошую корреляцию. Стоит отметить, что при малых размерах пипетки с течением времени на ее вершине может образоваться повышенная концентрация ионов одного знака, что приводит к эффекту "выпрямления" тока (рис. 2, б). В общем случае это можно считать паразитным эффектом при сканировании образцов, т.к. ток может изменяться при одном и том же напряжении с течением времени, однако в некоторых случаях этот эффект может быть полезен (например, в микро-флюидике и наноэлектронике для управления заряженными частицами в потоке или создания "жидких" диодов).
а
б
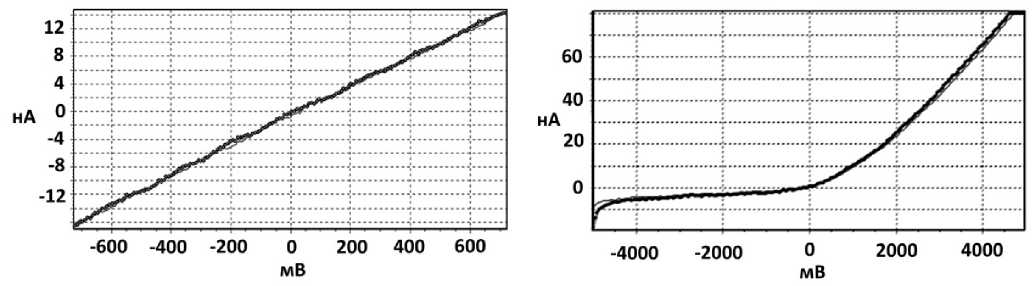
Рис. 2. Типичные значения ВАХ НП в растворе 0.9% масс. NaCl.
а — при первом погружении НП в раствор; б — эффект "выпрямления" тока [7], связанный с накоплением ионов одного знака вблизи пипетки (ионная блокада). ВАХ построены по многократно измеренным кривым
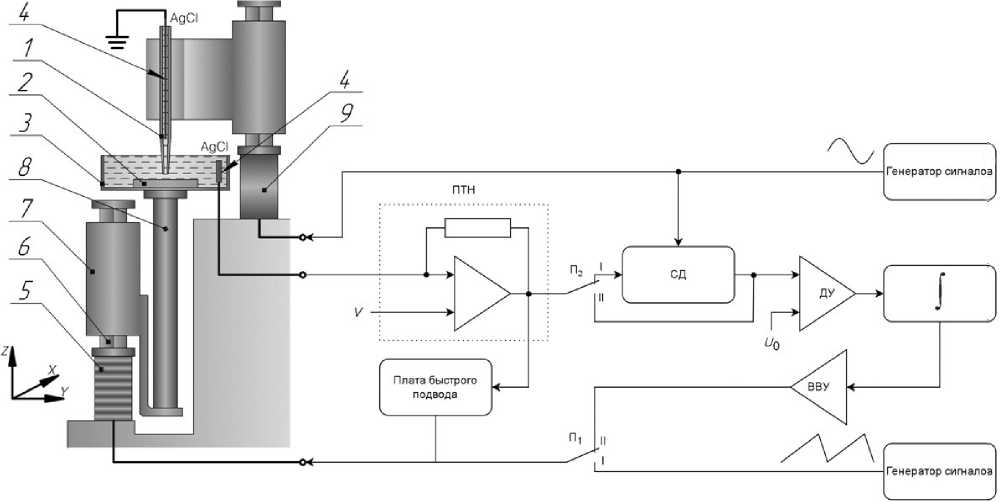
Рис. 3. Схема измерительной головки многомодового прибора СМИП с петлей обратной связи.
1 — НП с электролитом; 2 — образец; 3 — чашка Петри с электролитом; 4 — AgCl-электроды; 5 — пьезопакет; 6 — титановый стержень; 7 — каретка; 8 — пьезотрубка; 9 – пьезоэлемент; ПТН — преобразователь ток-напряжение; СД — синхродетектор; ДУ — дифференциальный усилитель; U 0 — опорное напряжение при сканировании; J — интегратор; ВВУ — высоковольтный усилитель; П1, П2 — переключатели
На рис. 3 представлена схема измерительной головки с петлей обратной связи, обеспечивающая работу СМИП в режимах постоянного тока, переменного тока с модуляцией расстояния между зондом и образцом и в прыжковом режиме. В зазоре между зондом 1 в виде неподвижной стеклянной НП, заполненной электролитом, и образцом 2 на дне чашки Петри 3, также заполненной электролитом, протекает ионный ток под действием напряжения смещения V , приложенного между AgCl-электродами 4. Пошаговое сближение пипетки 1 и образца 2 осуществляется "пьезоинерциальным" способом с помощью пьезодвижителя на основе пьезопакета 5 (P885.1, Physical Instruments), управляемого асимметричными импульсами с резкими (~10 мкс) и плавными (~200 мс) фронтами. Асимметричные импульсы напряжения (рис. 4) подключаются к пьезопакету при замыкании контакта I переключателя П1. Один торец пьезопакета 5 приклеен к неподвижному основанию, а к противоположному торцу приклеен титановый стержень 6, к которому прижата каретка 7 с установленной на ней пьезотрубкой 8, обеспечивающей сканирование в плоскости ( XY ), на которой закреплена чашка Петри 3 с образцом 2.
Высоковольтные усилители, управляющие сканированием, на схеме не показаны. Диапазон сканирования в плоскости XY составляет 30 х 30 мкм.
Под действием резкого фронта пьезопакет 5 резко растягивается или сжимается в зависимости от знака электрического напряжения. В этом случае сила инерции, действующая на каретку 7, больше, чем сила трения. В результате каретка 7 скользит по поверхности направляющего стержня 6 вдоль оси Z. При действии плавного фронта управляющего импульса сила инерции меньше, чем сила трения, и проскальзывания не происходит. Направление движения каретки вверх или вниз можно изменить, сменив знак управляющего напряжения или поменяв местами передний и задний фронты управляющих импульсов. Как показано в [23, 24], используя СЗМ, можно точно измерить шаги пьезоинерциального движителя.
На рис. 4 представлены результаты пошагового измерения перемещения пьезоинерциального движителя 5, 6, 7 вверх/вниз вдоль координаты Z (рис. 4, а) и гистограмма (рис. 4, б) распределения величины шага при движении вверх соответственно. Видно, что средний шаг при движении образца вверх ~ 100 нм при максимальном значении шага 145 нм. Соответствующие значения при движении каретки 7 вниз примерно в два раза больше, что связано с действием силы тяжести. Диапазон перемещения образца вдоль координаты Z составляет ~ 5 мм. Такие параметры пьезоинерциального движителя обеспечивают надежное
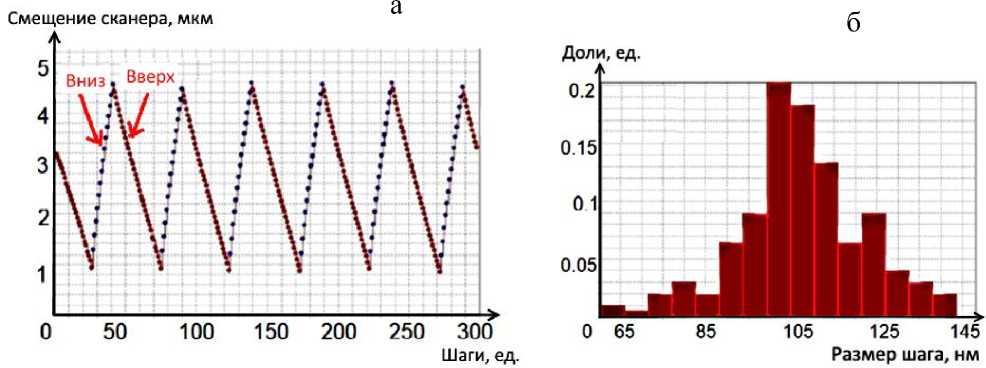
Рис. 4. Пошаговое и з м е рен и е пе ре м е щ е ния пьезои н ерци а льного движител я вверх/ в н и з в д оль к оо рд и на т ы Z ( а) и г и стогра м м а рас пре де л ения величи н ы ш а га п ри движе н ии в в е рх (б)
" б ес ка сательн ое " с бли ж е н и е зон да с образцо м, что принципиа ль но для СМИП, поскольк у с т еклянная на н оп и п е тка , к а к п ра вило, ра зрушае тс я п ри малей ше м с толкно в ении с твердой по д ложк ой .
Для пе ре х од а от ре ж и ма п одво д а/отв од а к реж и му плавн ог о ск а нир ов ания пьезопаке т 5 включае тс я в п етл ю ОС при за мы к а н и и кон та кта II и размыка н ии контакта I переключателя П 1 . Тепе рь п ьезопак е т 5 у п рав л я е тся п лавно и зменяющи мс я н а п ряжение м от В В У , ка ре тка 7 у д ерж и ваетс я си л ам и тре н и я и не про с кальзывает п о с тержню 6, п ри э то м пь е зопа к ет 5 об е сп е чива е т п л а в ное пе ре мещение образца в д оль координ а ты Z , выполня я ф у нкцию и спол н и те ль н ого э ле мента СС. Диапа з о н п лавн ог о ска н и ро ван и я с оставляет ~ 7 мкм.
В нанометровом зазоре между торцом заостренного капилляра и образцом протекает ионный ток Ii,, который на AgCl-электродах трансформируется в электронный ток и с помощью преобразователя ток-напряжение (ПТН), представляющего собой операционный усилитель с сопротивлением R в обратной связи, преобразуется в электрическое напряжение, пропорциональное ионному току U = R · Ii. В нашем случае R ~ 10–100 МОм. В режиме постоянного тока контакты переключателя П2 находятся в положении II. Напряжение U сравнивается на дифференциальном усилителе с опорным напряжением U0 и подается на вход интегратора, а затем на вход высоковольтного усилителя, подключенного к пьезопакету, перемещающему образец 2 вдоль оси Z таким образом, чтобы поддерживать в процессе сканирования постоянное значение ионного тока, протекающего через пи- петку. В описываемом приборе режим переменного тока осуществляется за счет модуляции зазора между образцом и зондом с помощью пьезоэлемента 9, раскачивающего пипетку с заданной амплитудой и частотой ~1 кГц.
Для переход а в ре ж и м п е ре м е нног о ток а перемен н ое н а п ряж ени е п одк л ю ча ется к п ьезоак т юатор у в вид е биморфного пь е зоэ л е м ен та , а та кже к од н ому и з входов СД . Конта к ты перек л ю ча теля П 2 переводятся в положении I, и возник а ющ и й в ре зультате моду л я ц ии за зора п е ременн ы й сигнал с в ыхода ПТН проп у ска е тся дополните ль но ч е рез С Д , опорным си гн алом к оторо го с л ужит н апряжение, ра ска ч и в ающ е е пьезоэлемент 9 . В ре зуль та те в процес с е ск а ниро в ания С С под д ерживае т постоянной амплитуду переменного с игн а ла на ч а стоте модуляции. Да н на я с хема та к ж е мож е т п одд е ржив а ть и режи м п е ременного ток а с модуляц и ей напряжен и я . В э том с л у ча е п е ременное н апряж е ние подключается не к пьезоактюато ру 9, а через в х од н ое с оп роти в лен и е о перационного у си л ителя ПТН к AgCl- э лектрод у , распол ож енн ом у в ча шке Петри.
В прыж к ово м реж и ме петля О С ком му тируе тс я либ о дл я р а б о ты в ре ж и ме постоянного л и бо переменного тока. П еред пе ре меще н ием об ра зц а в н ов ую к о орд и нату об ра зец с н а ча ла отвод и тс я от зонда вдоль координаты Z на определенное ра сстояние путе м изменения опорного на п ряжен и я на и н в е ртир у емом вхо д е д ифференциального у с илите ля ( ДУ ) в петле О С , затем с помощью с к анера 8 образец переводится в новое п ол ож ени е , после чего в петле ОС восс та навлив а етс я п ре жнее
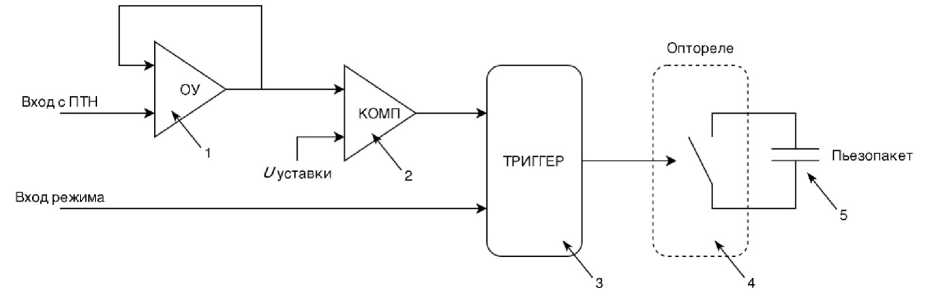
Рис. 5. Схема системы быстрого подвода.
1 — повторитель, 2 — компаратор, 3 — триггер, 4 — оптореле, 5 — пьезопакет
значение опорного напряжения U 0 . В результате СС захватывает сигнал, равный опорному значению U 0 в новой точке образца.
Для уменьшения времени подвода НП к образцу используется система быстрого подвода (рис. 5). Эта система подключается к выходу ПТН в режиме постоянного тока. Сигнал с ПТН поступает на повторитель 1 для увеличения входного сопротивления и далее сравнивается компаратором 2 с напряжением уставки. При приближении пипетки к образцу ток уменьшается, поэтому напряжение уставки устанавливается немного меньше напряжения, соответствующего току, протекающему через НП на отдалении от образца. Когда ток немного уменьшается при приближении к образцу, срабатывает компаратор и активирует триггер 3. Триггер включает оптореле 4, которое шунтирует пьезопакет 5. При переключении режима работы с подвода на сканирование триггер сбрасывается, оптореле размыкается и не мешает проводить сканирование.
РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЕ
В качестве тестового образца для тестирования различных режимов СМИП была выбрана полимерная реплика, снятая с тестовой калибровочной решетки TGZ02 (НТ-МДТ, Россия), представляющей собой набор периодически расположенных борозд высотой 110 ±2 нм и периодом 3±0.05 мкм (см. Приложение, рис. П1). На твердую поверхность калибровочной решетки TGZ02 наносился этиленвинилацетатный расплавленный (78–80 °С) полимер. Затем после остывания осуществлялось
а
б
в
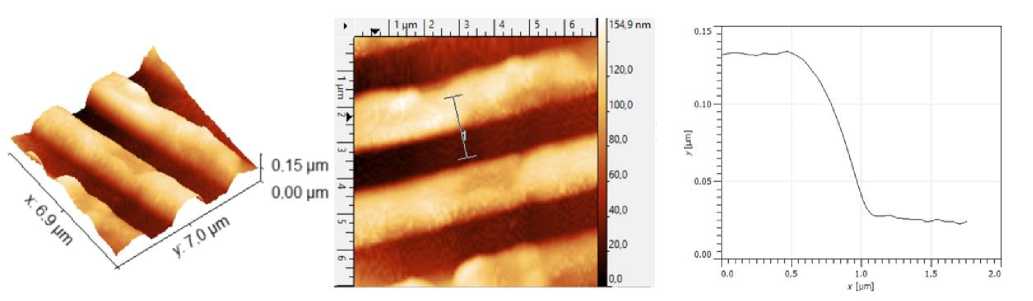
Рис. 6. АСМ-изображение реплики решетки TGZ02.
а — 3D-отображение, б — 2D-отображение, в — усредненное поперечное сечение ступеньки (выборка по 20 сечениям)
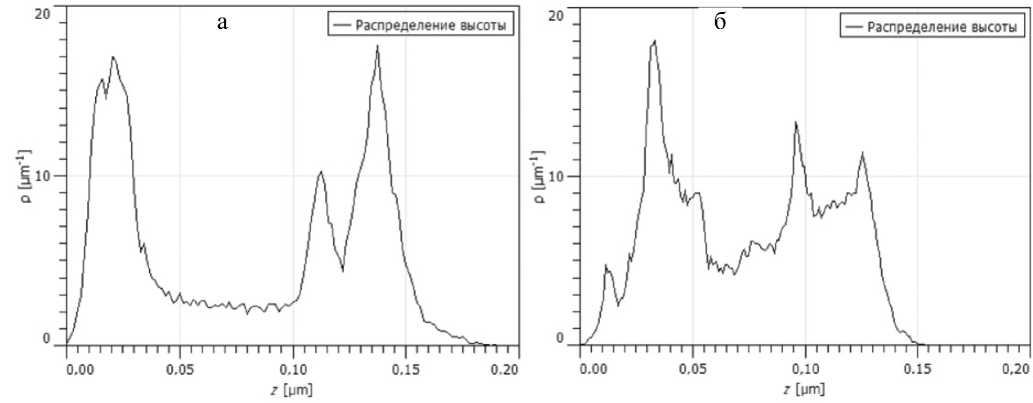
Рис. 7. Гистограммы распределения высот для АСМ-изображения решетки TGZ02 (а) и реплики решетки (б)
механическое надавливание (штамповка) и отслаивание полимера от поверхности исходной калибровочной решетки. АСМ изображение реплики решетки TGZ02 показано на рис. 6, гистограммы распределения высот на рис. 7.
Типичные значения зависимости тока от расстояния I ( z ) приведены на рис. 8. Значения нормированы на ток насыщения в случае режима постоянного тока (СМИП DC) и на максимальное значение сигнала при заданном Z у поверхности в случае режима модуляции зазора (СМИП AC).
Видно, что кривая подвода, измеренная в режиме постоянного тока, демонстрирует уменьшение тока при уменьшении зазора между зондом и образцом, в то время как в режиме переменного тока с модуляцией зазора наблюдается обратная зависимость. Это связано с тем, что, модулируя Z и измеряя с помощью СД амплитуду переменной составляющей в ионном токе, мы фактически измеряем сигнал, пропорциональный d I / d Z , т.е. производную от кривой подвода, значения которой увеличиваются при уменьшении зазора.
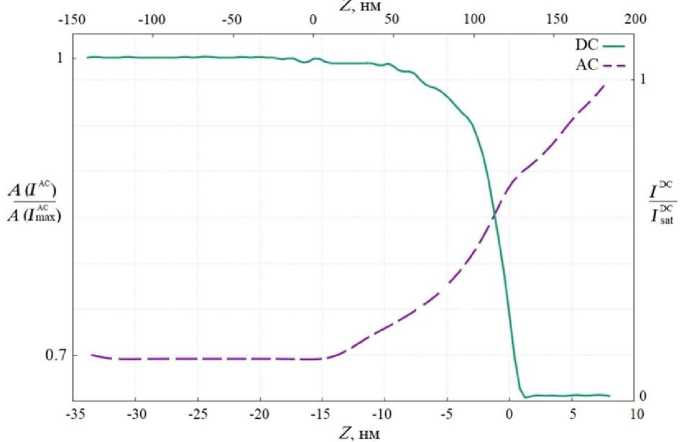
Рис. 8. Кривая подвода в режимах СМИП.
Hopping в режиме постоянного тока DC и в режиме модуляции AC
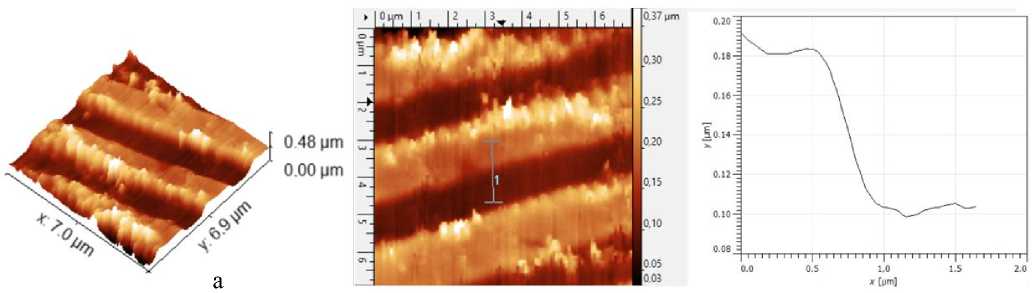
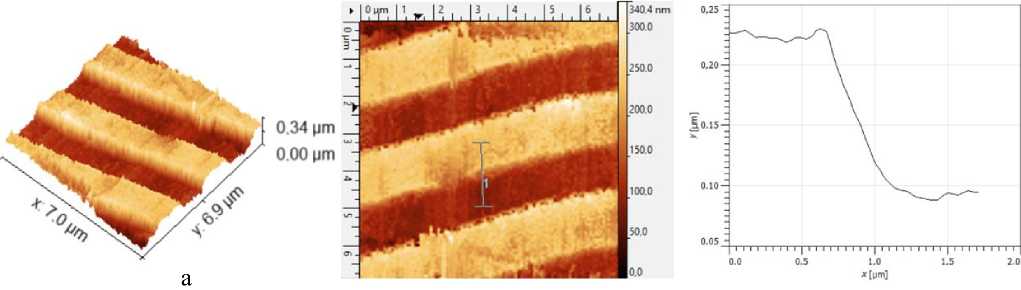
Рис. 9. СМИП DC-изображение реплики решетки TGZ02.
а — 3D-отображение, б — 2D-отображение, в — усредненное поперечное сечение ступеньки (выборка по 20 сечениям)
б в
Рис. 10. СМИП hopping-изображение реплики решетки TGZ02.
а — 3D-отображение, б — 2D-отображение, в — усредненное поперечное сечение ступеньки (выборка по 20 сечениям)
На рис. 6, 9, 10 показаны результаты измерения реплики тестовой решетки в различных модах. Исходя из полученных данных при измерении реплики, высота структуры в одних и тех же участ- ках составила минимальные значение в режиме СМИП постоянного тока, а максимальные при режиме СМИП hopping (табл.).
Табл. Статистические параметры СМИП-изображений тестового образца, полученных в режимах постоянного тока и hopping
|
Параметр |
АСМ решетки (полуконтакт) |
АСМ реплики решетки (полуконтакт) |
Режим СМИП постоянного тока (DC) |
Режим СМИП hopping |
|
Среднее значение высоты ступеньки*, нм |
106.0 |
102.4 |
78.2 |
128.9 |
|
Средний наклон боковой стенки*, нм |
238.0 |
552.0 |
452.0 |
464.0 |
|
Шероховатость S a на плоском участке, нм |
5.35 |
5.98 |
13.85 |
9.89 |
* по усредненным данным на базе выборки из 20 поперечных сечений ступеньки
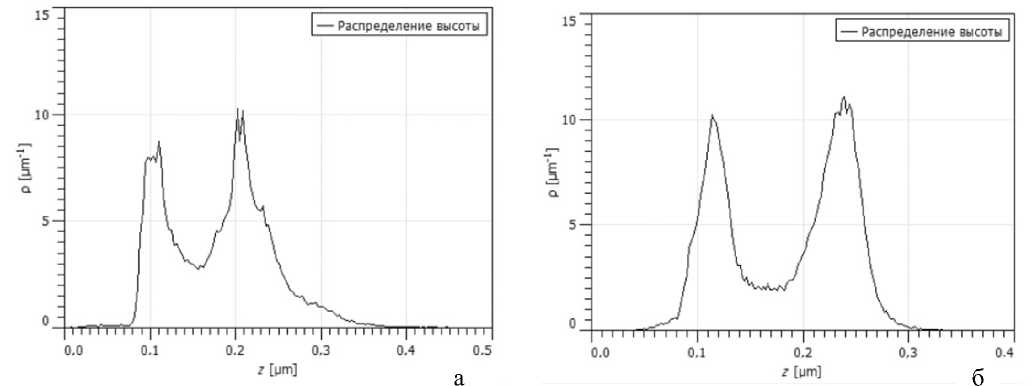
Рис. 11. Гистограммы высот для изображений, полученных в режимах СМИП постоянного тока DC (а) и hopping (б)
Результаты АСМ с решетки TGZ02 и полученной с нее реплики хорошо согласуются с паспортными значениями по высоте и периоду. Стоит отметить, что в связи с неровными краями реплики в некоторых местах высота и ширина наклона ступеньки может варьироваться, для сравнения были найдены наиболее характерные и ровные участки.
В режиме постоянного тока изображение не такое гладкое, как в hopping, видны выбросы по высоте на краях решетки и ровных участках ступенек. Для сравнения изображений СМИП был выбран одинаковый участок. Выявлена общая тенденция к повышению максимальных значений высоты для режимов СМИП (до ~350 нм) по сравнению с АСМ (до ~200 нм), что связано с протяженными (СМИП DC) и точечными (СМИП hopping) выбросами по координате Z на поверхности. Границы объектов (ширина наклона ступеньки) в обоих режимах СМИП имеют схожие значения ~ 450 нм, что точнее АСМ на реплике (~ 550 нм), но хуже примерно в 2 раза АСМ исходной решетки (~ 250 нм).
На основании данных, в режиме hopping наблюдается как хороший контраст изображения, так и хорошее латеральное разрешение, что видно по изображениям и поперечным сечениям отдельных дорожек решетки, усредненных по 20 линиям. Тем не менее минусом является большое время сканирования в режиме hopping, что в некоторых случаях может привести к влиянию теплового и ионного дрейфа на качество изображения [25, 26].
По данным гистограмм изображений (рис. 8, 11) видно, что разделение на нижний и верхний уровни высот более дифференцировано у режима hopping с уклоном в большие высоты. В режимах СМИП можно наблюдать два пика, тогда как в режиме АСМ можно выделить три пика (у реплики больше пиков за счет неровности стенки), что может быть связано с наличием локальных областей повышения высоты при сканировании образца. Тем не менее все значения лежат примерно в одной области, соответствующей реальной высоте образца.
Согласно усредненным данным (табл.) разброс шероховатости на плоском участке составляет большие значения для режима СМИП DC, что связано с резкими выбросами высот на границах ступенек. Значения шероховатости решетки и ее реплики в АСМ имеют схожие значения. По сравнению с режимом постоянного тока режим hopping дает как хороший контраст, так и хорошее разрешение СМИП без срывов и участков выбросов по высоте. Это хорошо подтверждают результаты исследования не только неорганических объектов, но и живых клеток (Приложение, рис. П2, П3), для которых режим СМИП является приоритетным благодаря малой инвазивности метода и возможности работать в жидких буферных средах.
ЗАКЛЮЧЕНИЕ
Таким образом, в работе представлен и исследован "home-made" — многомодовый прибор СМИП с системой пьезоинерциального перемещения образца на основе пьезопакета. Предложенная система перемещения обеспечивает прецизионный пошаговый подвод/отвод образца к зонду с диапазоном перемещения ~ 5 мм и средним минимальным шагом ~ 150 нм, что достаточно для точного измерения кривой подвода и выбора рабочей точки без повреждения стеклянной НП. Диапазон плавных перемещений образца при получении СМИП-изображений составлял ~ 7 мкм в направлении, перпендикулярном к поверхности образца, и 30 х 30 мкм в плоскости образца. Для получения СМИП-изображений были изготовлены методом теплового разогрева с последующим механическим разрывом нанопипетки из боросиликатного стекла с минимальным внутренним радиусом ~50 нм и углом заострения вершины ~3– 5°. Проведено сравнение режимов постоянного ионного тока, переменного ионного тока с модуляцией нанозазора "зонд – образец" и режима перескока с использованием полимерной реплики, снятой с тестовой твердотельной калибровочной решетки (набор периодически расположенных борозд высотой 110 ±2 нм и периодом 3 ±0.05 мкм). Обнаружено, что режим модуляции ионного тока путем модуляции зазора дает более стабильные СМИП-изображения по сравнению с режимом постоянного тока, но завышает значения высоты рельефа. Режим перескока как демонстрирует наиболее стабильные СМИП-изображения, так и достаточно точно отображает рельеф тестового образца, однако требует большего времени сканирования. Тем не менее, выбирая режим перескока, следует учитывать, что при большом времени сканирования может проявиться как тепловой дрейф, так и дрейф, вызванный изменением потенциала на AgCl-электродах. Таким образом, выбор оптимального режима СМИП должен определяться конкретными условиями и задачами эксперимента. Результаты работы могут быть полезны как при проектировании СМИП, так и при решении задач в области нанодиагностики мягких нативных биологических объектов в жидкой среде, в исследовании ионообменных процессов и т.п.
ПРИЛОЖЕНИЕ
а
б
в
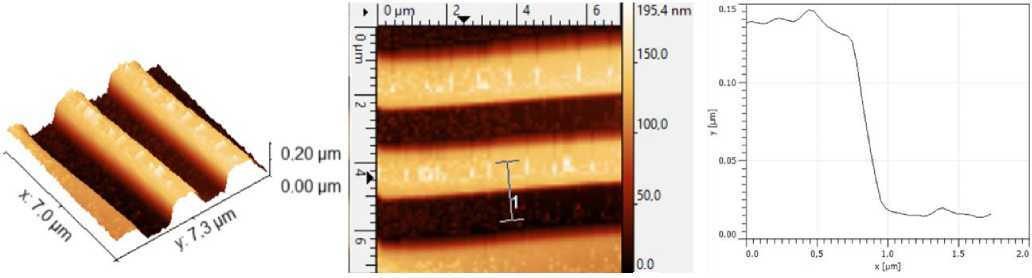
Рис. П1. АСМ-изображение решетки TGZ02.
а — 3D-отображение, б — 2D-отображение, в — усредненное поперечное сечение ступеньки (выборка по 20 сечениям)
б
в
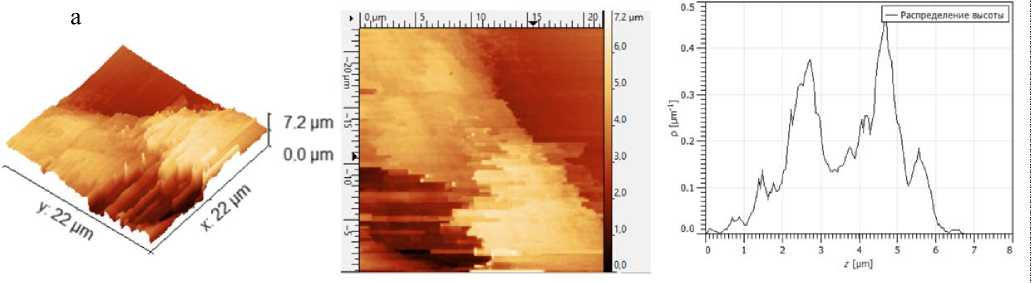
Рис. П2. СМИП DC-изображение клеток CHO (Chinese hamster ovary). а — 3D-отображение, б — 2D-отображение, в — гистограмма высот
а
б
в
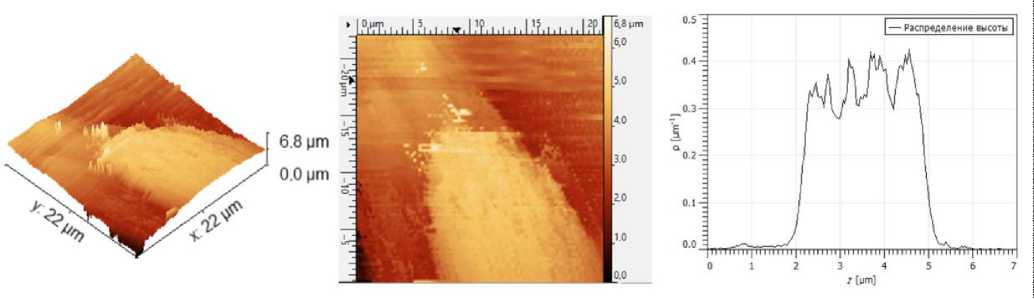
Рис. П3. СМИП hopping-изображение клеток CHO (Chinese hamster ovary). а — 3D-отображение, б — 2D-отображение, в — гистограмма высот
Работа выполнена при поддержке государственного задания № FFZM-2022-0008 (тема № 22 542,089) Министерства образования и науки Российской Федерации.
Список литературы МНОГОМОДОВЫЙ СКАНИРУЮЩИЙ МИКРОСКОП ИОННОЙ ПРОВОДИМОСТИ С СИСТЕМОЙ ПЬЕЗОИНЕРЦИАЛЬНОГО ПЕРЕМЕЩЕНИЯ
- 1. Hansma P.K., Drake B., Marti O., Gould S.A., Prater C.B. The scanning ion-conductance microscope // Science. 1989. Vol. 243, is. 4891. P. 641–643. DOI: 10.1126/science.2464851
- 2. Happel P., Dietzel I.D. Backstep scanning ion conductance microscopy as a tool for long term investigation of single living cells // J. Nanobiotechnol. 2009. Vol. 7, no. 7. DOI: 10.1186/1477-3155-7-7
- 3. Morris C.A., Chen C.-C., Baker L.A. Transport of redox probes through single pores measured by scanning electrochemical-scanning ion conductance microscopy (SECM-SICM) // Analyst. 2012. Vol. 137, no. 13. P. 2933–2938. DOI: 10.1039/C2AN16178H
- 4. Zhang P., Aydemir N., Alkaisi M., Williams D.E., TravasSejdic J. Direct writing and characterization of threedimensional conducting polymer PEDOT arrays // ACS Appl. Mater. Interfaces. 2018. Vol. 10, no. 14. P. 11888–11895. DOI: 10.1021/acsami.8b02289
- 5. Pellegrino M., Orsini P., Pellegrini M., Baschieri P., Dinelli F., Petracchi D., Tognoni E., Ascoli C. Integrated SICM-AFM-optical microscope to measure forces due to hydrostatic pressure applied to a pipette // Micro & Nano Lett. 2012. Vol. 7, no. 4. P. 317–320. DOI: 10.1049/mnl.2011.0670
- 6. Zhukov M.V., Sapozhnikov I.D., Golubok A.O., Chubinskiy-Nadezhdin V.I., Komissarenko F.E., Lukashenko S.Y. Scanning ion-conductance and atomic force microscope with specialized sphere-shaped nanopippettes. // J. Phys.: Conf. Ser. 2017. Vol. 917. Id. 042022.
- 7. Page A., Perry D., Unwin P.R. Multifunctional scanning ion conductance microscopy // Proc. R. Soc. A. 2017. Vol. 473, is. 2200. DOI: 10.1098/rspa.2016.0889
- 8. Novak P., Li Ch., A. I., Shevchuk Yuri, Korchev E. Nanoscale live-cell imaging using hopping probe ion conductance microscopy // Nature methods. 2009. Vol. 6, no. 4. P. 279–281.
- 9. Sa N., Baker L.A. Experiment and Simulation of Ion Transport through Nanopipettes of Well-Defined Conical Geometry // Journal of The Electrochemical Society. 2013. Vol. 160, no. 6. P. 376–381. DOI: 10.1149/2.128306jes
- 10. Wei Ch., Bard A.J., Feldberg S.W. Current rectification at quartz nanopipet electrodes // Anal. Chem. 1997. Vol. 69, is. 22. P. 4627–4633. DOI: 10.1021/ac970551g
- 11. Li P., Liu L., Yang Y., Zhou L., Wang D., et al. Amplitude modulation mode of scanning ion conductance microscopy // Journal of Laboratory Automation. 2015. Vol. 20, no. 4. P. 457–462.
- 12. Li P., Liu L., Wang Y., Yang Y., Zhang Ch., Li G. Phase modulation mode of scanning ion conductance microscopy // Applied physics letters. 2014. Vol. 105, is. 5. Id. 053113. DOI: 10.1063/1.4891571
- 13. Klenerman D., Shevchuk A., Novak P., Korchev Y.E., Davis S.J. Imaging the cell surface and its organization down to the level of single molecules // Philos. Trans. R. Soc., B. 2013. Vol. 368, is. 1611. Id. 20120027. DOI: 10.1098/rstb.2012.0027
- 14. Zhuang J., Cheng L., Liao X., Zia A.A., Wang Zh. A fuzzy control for high-speed and low-overshoot hopping probe ion conductance microscopy // Rev. Sci. Instrum. 2020. Vol. 91, is. 3. Id. 033703. DOI: 10.1063/1.5114642
- 15. Wang Z., Zhuang J., Gao Z., Liao X. A fast scanning ion conductance microscopy imaging method using compressive sensing and low-discrepancy sequences // Rev. Sci. Instrum. 2018. Vol. 89, is. 11. Id. 113709. DOI: 10.1063/1.5048656
- 16. Zhuang J., Jiao Y., Mugabo V. A new scanning mode to improve scanning ion conductance microscopy imaging rate with pipette predicted movement // Micron. 2017. Vol. 101. P. 177–185. DOI: 10.1016/j.micron.2017.07.007
- 17. Gesper A., Hagemann P., Happel P. A low-cost, large field-of-view scanning ion conductance microscope for studying nanoparticle–cell membrane interactions // Nanoscale. 2017. Vol. 9, is. 37. P. 14172–14183. DOI: 10.1039/C7NR04306F
- 18. Watanabe S., Ando T. High-speed XYZ-nanopositioner for scanning ion conductance microscopy // Appl. Phys. Lett. 2017. Vol. 111, is. 11. Id. 113106. DOI: 10.1063/1.4993296
- 19. Jung G.E., Noh H., Shin Y.K., Kahng S.J., Baik K.Y., Kim H.B., Cho N.J., Cho S.J. Closed-loop ARS mode for scanning ion conductance microscopy with improved speed and stability for live cell imaging applications // Nanoscale. 2015, Vol. 7, is. 25. P. 10989–10997. DOI: 10.1039/C5NR01577D
- 20. Shevchuk A., Tokar S., Gopal S., Sanchez-Alonso J.L. et al. Angular approach scanning ion conductance microscopy // Biophysical Journal. 2016. Vol. 110, is. 10. P. 2252–2265. DOI: 10.1016/j.bpj.2016.04.017
- 21. Rheinlaender J., Schäffer T.E. Image formation, resolution, and height measurement in scanning ion conductance
- microscopy // Journal of applied physics. 2009. Vol. 105, is. 9. Id. 094905. DOI: 10.1063/1.3122007
- 22. Rheinlaender J., Schäffer T.E. An accurate model for the ion current-distance behavior in SICM allows for calibration of pipet tip geometry and tip-sample distance // Analytical Chemistry. 2017. Vol. 89, is. 21. P. 11875–11880. DOI: 10.1021/acs.analchem.7b03871
- 23. Sapozhnikov I., Gorbenko O., Felshtyn M., Zhukov M., Golubok A. SPM-unit combined with optical microscope objective // AIP Conf. Proc. 2019. Vol. 2064, is. 1. Id. 020003. DOI: 10.1063/1.5087659
- 24. Sapozhnikov I.D., Gorbenko O.M., Felshtyn M.L., Zhukov M.V., Golubok A.O. Features of combining of scanning probe microscopy with optical and scanning electron microscopy // IOP Conference Series: Materials Science and Engineering. 2019. Vol. 699. Id. 012040. DOI: 10.1088/1757-899X/699/1/012040
- 25. Zhukov M.V., Lukashenko S.Yu., Sapozhnikov I.D., Golubok A.O. Creation and study of liquid nanojunction using
- SPM-base technology // J. Phys.: Conf. Ser.2020.Vol. 1695. Id. 012167. DOI: 10.1088/1742-6596/1695/1/012167
- 26. Zhukov M.V., Lukashenko S.Yu., Sapozhnikov I.D., Felshtyn M.L., Gorbenko O.M., Golubok A.O. Scanning ionconductance microscope with modulation of the sample position along the Z coordinate and separate Z-axial and lateral (X, Y) scanning // J. Phys.: Conf. Ser. 2021.Vol. 2086. Id. 012074. DOI: 10.1088/1742-6596/2086/1/012074
