Многозонные частотно-широтно-импульсные интегрирующие регуляторы с "эстафетными" алгоритмами работы релейных элементов

Автор: Цытович Леонид Игнатьевич, Брылина Олеся Геннадьевна
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Устройства аналоговой и цифровой электроники
Статья в выпуске: 4 т.16, 2016 года.
Бесплатный доступ
Рассмотрена базовая структура и принцип действия многозонного интегрирующего регулятора, в основе которого лежит частотно-широтно-импульсная модуляция. В среде MATLAB + Simulink разработана виртуальная модель многозонного регулятора, на ее основе построены временные диаграммы регулятора. Приведены основные расчетные соотношения и статические характеристики многозонного регулятора: амплитудная и модуляционная характеристики. Отмечены достоинства и недостатки устройств данного класса. Предложены два способа организации «эстафетных» режимов работы релейных элементов, входящих в состав многозонного интегрирующего регулятора. В частности, рассмотрены многозонный регулятор с параметрическим и с число-импульсным «эстафетными» алгоритмами работы релейных элементов. Главным достоинством «эстафетных» режимов является их возможность обеспечивать равномерное распределение потерь мощности между выходными силовыми ключами, что позволяет повысить энергетические показатели системы управления и ее надежность. Приведены структуры многозонных регуляторов с «эстафетными» режимами работы и временные диаграммы их сигналов. Показан пример построения на основе многозонного регулятора переменного напряжения системы управления температурой в электронагревательной установке. При «эстафетном» режиме работы электронагревателей создается «вращающееся» тепловое поле, в результате чего снижается не менее чем в 3-5 раз неравномерность температуры по объему печи. Статья может быть интересна для специалистов, работающих в области информационной и силовой электроники, автоматизации технологических процессов и электропривода в целом.
Многозонная модуляция, многозонный регулятор, модуляционная зона, сумматор, интегратор, релейный элемент, режим автоколебаний, "эстафетный" режим, регулятор температуры, тиристорный ключ
Короткий адрес: https://sciup.org/147158378
IDR: 147158378 | УДК: 62-83:681.51(075.8) | DOI: 10.14529/power160408
Multizone frequency-width-pulse integrating regulators with relay algorithm
The basic structure and operating principle of the multizone integrating regulator are considered in the paper. The regulator is based on multizone frequency-width-pulse modulation. The virtual model of the multizone regulator is made in the MATLAB + Simulink program. Time diagrams of the regulator are constructed with a virtual model. Main equations and static characteristics of multizone the regulator, in particular, amplitude and modulation characteristics are given. Advantages and disadvantages of the regulators are mentioned. Two ways of relay algorithm are offered in paper. Relay elements are parts of the regulator. In particular, multizone regulator with self-reactance and unit-counting relay algorithm are shown. The main advantage of relay algorithms is the ability to provide a uniform distribution of the power loss between the output power keys. It enables improvement of energy performance of the control system and of its reliability. The structures of multizone regulators with relay algorithms and time diagrams of the signals are given. Example of the temperature control system in the electric heating installation based on the multi-zone AC regulator is provided. The “rotating” thermal field is generated in the “relay” mode of electric heaters. As a result, uneven temperatures in the heating installation are reduced by at least 3-5 times. This paper can be interesting for power and information electronics, electric drive and process automation specialists.
Текст научной статьи Многозонные частотно-широтно-импульсные интегрирующие регуляторы с "эстафетными" алгоритмами работы релейных элементов
Многозонные интегрирующие регуляторы (МР), в основе которых лежит частотно-широтноимпульсная модуляция, являются сравнительно новым видом элементов автоматики. Они позволяют с высокой результативностью решать широкий круг технических задач, связанных с повышением метрологических и эксплуатационных характеристик импульсных преобразователей информации [1–7], включая и столь сложные вопросы, как самодиагностирование и автоматическое резервирование каналов регулирования в системах автоматического управления [8, 9].
Однако при построении на основе данного класса устройств силовых преобразователей, например регуляторов переменного напряжения, возникает необходимость выравнивания потерь мощности между выходными силовыми ключами с целью повышения энергетических показателей системы в целом, в частности снижение потребления электроэнергии, и ее надежности [6, 10, 11].
В этом плане перспективны «эстафетные» алгоритмы работы силовых ключей МР [1, 12, 13], подразумевающие их поочередное включение в функции входного сигнала или заданного параметра (время работы, количество переключений). В частном случае это может быть «кольцевой» режим [14, с. 677–681]. Ряд «эстафетных» алгоритмов работы рассмотрены ниже.
1. Базовая структура и принцип действия многозонного интегрирующего регулятора
На рис. 1, а приведена базовая структура МР и на рис. 1, б, как частный случай, представлена виртуальная модель МР для трех релейных элементов, реализованная в среде MATLAB + Simulink. Виртуальная модель позволяет получить основные характеристики МР (рис. 2) и временные диаграммы (рис. 1, в–з). МР содержит [15, 16]: источник входного сигнала Х ВХ (Input Signal), сумматоры Σ 1, Σ 2, интегратор И (Integrator) и группу из нечетного числа n ≥ 3 релейных элементов РЭ1–РЭ n (RE1–RE3). На модели (рис. 1, б) дополнительно
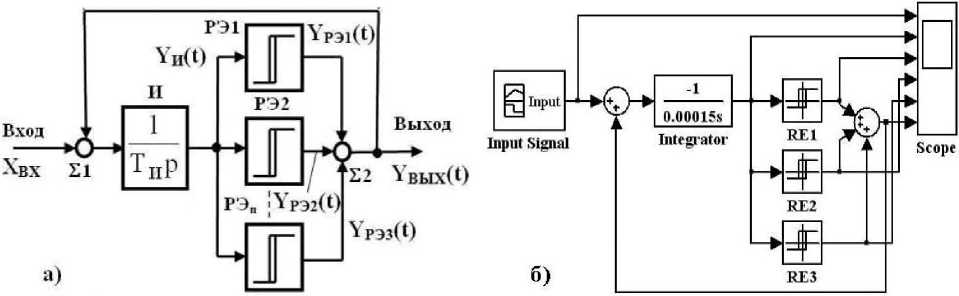
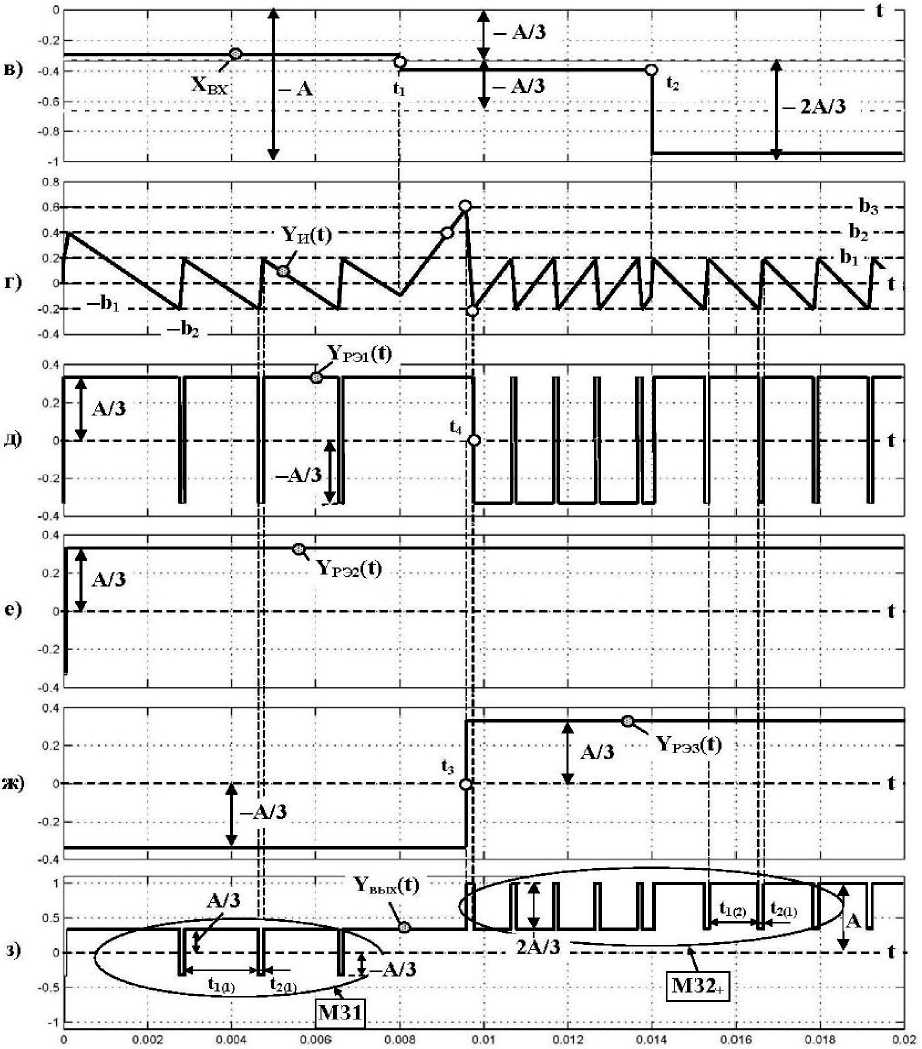
Рис. 1. Структурная схема (а), виртуальная модель (б) и временные диаграммы сигналов (б–ж) многозонного интегрирующего регулятора
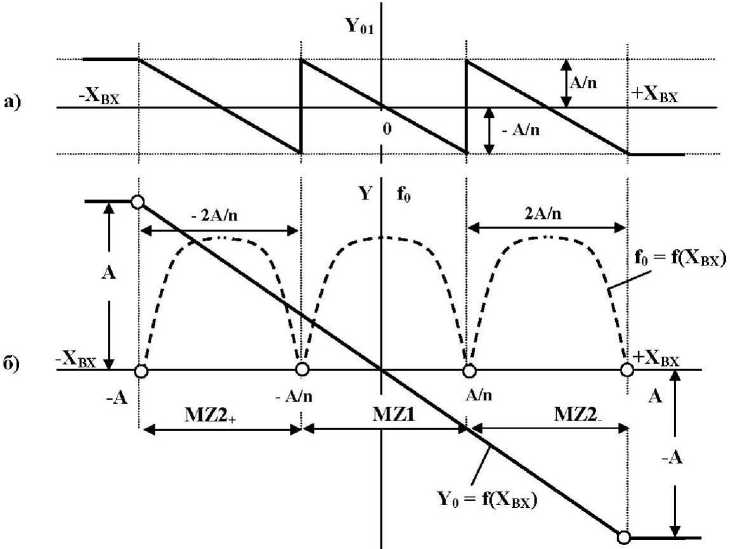
Рис. 2. Качественный вид статических характеристик многозонного интегрирующего регулятора
введен многоканальный осциллограф (Scope). Интегратор выполнен с передаточной характеристикой вида 1/ТИр, где ТИ – постоянная времени интегрирования. В общем виде выходной сигнал РЭ1–РЭn меняется дискретно в пределах ±А/n, где А – напряжение питание операционных усилителей, на базе которых традиционно выполняется интегратор и релейные элементы [15]. Все РЭ i имеют симметричную относительно «нуля», неинвертирующую петлю гистерезиса. Пороги переключения РЭ i выбираются из условия | ± b1 | < | ± b2 | < < | ± b3 | <….< | ± bn | , где индекс при «b» определяется порядковым номером РЭ на рис. 1, а. В модели МР (рис. 1, б) заданы следующие параметры: Т И = 0,00015; b1 = 0,2; b2 = 0,4; b3 = 0,6; выходные сигналы РЭ1–РЭ3 равны Y РЕ1 = Y РЕ2 = Y РЕ3 = ± A/3.
Для рассмотрения принципа работы МР ограничимся числом n = 3, тогда выходной сигнал РЭ1–РЭ3 будет меняться в пределах ±А/3. Считаем также, что сигнал управления XВХ имеет отрицательный знак (рис. 1, а–в).
При включении МР и нулевом значении входного сигнала XВХ релейные элементы РЭ1–РЭ3 по знаку выходного сигнала включаются произвольным образом (рис. 1, д–ж). Однако, какой бы ни была первоначальная ориентация РЭ1–РЭ3 в конечном итоге в режиме автоколебаний оказывается ведущий РЭ с наименьшим значением порогов переключения, в данном случае РЭ1, а ведомые РЭ2 и РЭ3 переходят в статическое состояние, при котором их суммарный выходной сигнал равен нулю. В итоге, МР начинает работать в первой модуляционной зоне (МЗ1), ограниченной амплитудой ±А/3.
В случае, когда - XВХ< –А/3 (рис. 1, в, момент времени t < t 1 ), МР работает в первой модуляционной зоне «МЗ1» (рис. 1, з), где состояние РЭ2 и РЭ3 противоположно по знаку выходного сигнала (рис. 1, е, ж), а в режиме переключений находится РЭ1 (рис. 1, д). В интервале t 1(1) (рис. 1, з) скорость изменения выходного сигнала интегратора И (рис. 1, г) определяется разностью сигналов на входе (рис. 1, в) и выходе (рис. 1, з) МР, а в интервале t2 ( 1 ) – зависит от их суммы. В результате t1 ( 1 ) > t2 ( 1 ) и среднее значение Y0 выходного сигнала сумматора Σ 2 за интервал дискретизации t1 ( 1 ) + t2 ( 1 ) достигает величины, пропорциональной XВХ .
Если в момент времени t 1 входной сигнал достигает величины –А/3 < - ХВХ< –2А/3 (рис. 1, в, интервал времени t 1 – t 2 ), то в МР нарушается условие существования режима автоколебаний, так как результирующий сигнал на выходе Σ 1 остается отрицательным несмотря на состояния РЭ1 и РЭ2, равные А/3 (рис. 1, в, д, е, з).
В этом случае выходное напряжение интегратора И (рис. 1, г) начинает нарастать в положительном направлении до тех пор, пока выходной сигнал РЭ3 не станет равным А/3 (рис. 1, г, ж, момент времени t3). Затем МР переходит из первой «МЗ1» во вторую модуляционную зону «МЗ2+» (рис. 1, з), ограниченную пределами от +А/3 до +А.
После переключения РЭ1 в момент времени t 4 (рис. 1, д) МР вновь входит в режим устойчивых автоколебаний, когда амплитуда выходного сигнала интегратора И ограничена порогами переключения ±b 1 (рис. 1, г).
При этом среднее значение Y 0 выходных импульсов МР (рис. 1, з) складывается из постоянной составляющей первой модуляционной зоны «МЗ1» и среднего значения импульсов второй модуляционной зоны «МЗ2 + », а среднее значение Y 01 выходного сигнала РЭ1 (рис. 1, д) имеет отрицательный знак (рис. 1, д; 2, а).
Когда входной сигнал находится в области -2А/3 > - Х ВХ > —А (рис. 1, в, момент времени t > t2), то меняется производная участков пилообразного выходного сигнала интегратора И (рис. 1, г), и среднее значение Y 01 выходных импульсов РЭ1 становится положительным (рис. 1, д; 2, а). При этом длительность t1 ( 2 ) импульса второй модуляционной зоны (рис. 1, ж) оказывается больше интервала паузы t2 ( 2 ) (рис. 1, з).
В общем случае для произвольного нечетного числа РЭ модуляционная fo = f(ХВХ) и ампли- тудная Y0 = f(XВX) характеристики МР определяются из соотношений (1). Характеристики представлены на рис. 2.
<
t 1(z) =
t 2 (z) = V
ХВХ
2b 1 T И ;
■ 1 ) n 1 - Х ВХ
2b 1 T И
-
( 2Z i - 3 ) n
1 ;
f0 = [ t 1(z) + t 2(z) J ;
Y o = ( - 1 )|A| [ ( 2Z i - 3 ) + 2 y] n - 1
-
Х ВХ ;
( 2Z i - 3 ) nL X
;ВХ < ( 2Z i - 1 ) n - 1,
где: b1 = |b / A| - нормированное значение порогов переключения ± b 1 ; ХВХ = |ХВХ / А| - нормированная величина входного сигнала ХВХ МР; n – количество релейных элементов, причем n > 3 - нечетное число; Z i = 1,2,3... - порядковый номер модуляционной зоны; у = t 1 / (t 1 + t2) -скважность импульсной составляющей сигнала YВЫX (t); ± A - максимальная амплитуда сигнала YВЫХ (t) ; ТИ – постоянная времени интегратора.
При этом амплитудная характеристика Yo = f (ХВХ) имеет инвертирующий вид (рис. 2, б) и линейна во всем диапазоне изменения ХВХ по причине замкнутого характера структуры МР и наличия интегратора И в прямом канале регулирования [17].
Количество модуляционных зон «k» в МР связано с числом «n» релейных элементов соотношением (2) [18]
k = (n + 1)/2n > 3,5,7... . (2)
Характерной особенностью МР является то, что частота его выходных импульсов, нормированное значение которой с учетом (1) равно f0 = f0 /f0|XВX =0 =
= ( 2Z -1 - пХ вх )( пХ вх - 2Z i + 3 ) , (3) имеет квадратичную от входного воздействия зависимость и максимальна в «центре» каждой модуляционной зоны (рис. 2, б). Здесь: f0 = (t 1( Z ) + t2 (z) ) - 1 -текущее значение частоты выходных импульсов МР; f0|Xeх=0 - частота автоколебаний МР при нулевом значении сигнала ХВХ . При этом переход МР из одной модуляционной зоны в другую происходит путем прохождения характерных точек с нулевым значением частоты несущих автоколебаний (режим частотно-нулевого сопряжения модуляционных зон (рис. 2, б).
Наличие интегратора И в прямом канале регулирования и замкнутый характер структуры МР (рис. 1, а, б) обеспечивает его высокую статическую точность и помехоустойчивость, что выгодно отличает МР от регуляторов других типов [19–21]. К числу недостатков базовой структуры МР (рис. 1, а) следует отнести строгую иерархию режимов работы РЭ, когда релейный элемент с минимальным значением порогов переключения (на рис. 1 это РЭ1) постоянно находится в режиме переключений, а остальные РЭ выполняют вспомогательную функцию перевода МР в соответствующую модуляционную зону и фактически работают в статическом состоянии. При реализации МР на достаточно большую мощность нерациональность такого алгоритма управления выходными каскадами многозонного регулятора очевидна, так как основные потери мощности ложатся на выходные каскады ведущего РЭ, работающего в режиме переключений с частотой автоколебаний МР, в то время как ведомые релейные звенья функционируют в облегченном, с точки зрения нагрева их ключевых элементов, режиме.
Одним из способов «выравнивания» потерь мощности между выходными силовыми каскадами МР являются «эстафетные» алгоритмы работы релейных элементов, обеспечивающие последовательный переход ключевого режима от одного РЭ к другому.
-
2. Многозонный регулятор
с параметрическим «эстафетным» алгоритмом работы релейных элементов
Параметрический «эстафетный» алгоритм управления группой РЭ [1] достигается без введения в схему МР дополнительных функциональных элементов и основан на соответствующем выборе параметров РЭ, а также зависит от уровня и знака сигнала на информационном входе многозонного регулятора.
Рассмотрим данный вариант работы МР (рис. 3) применительно к структуре на рис. 1, а. Как и прежде, ограничимся числом релейных эле-
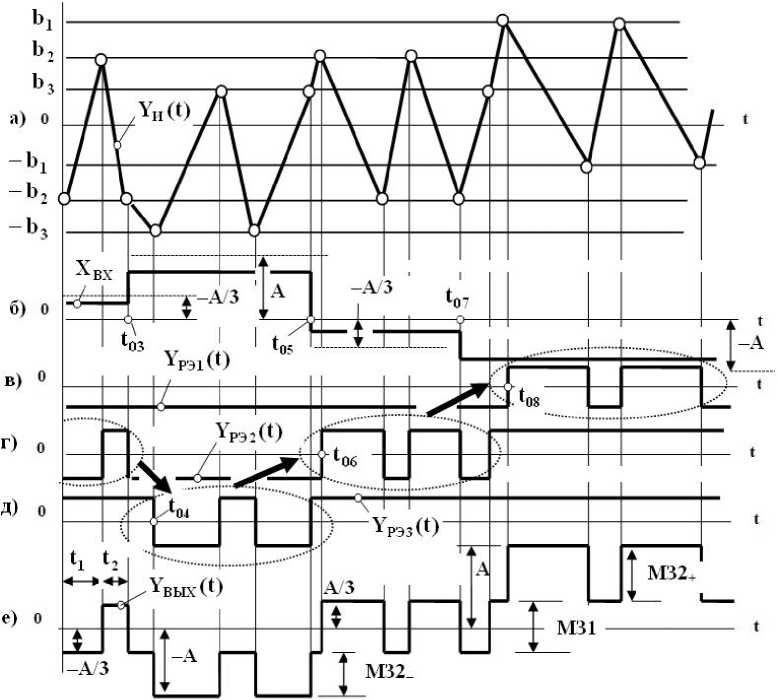
Рис. 3. Временные диаграммы сигналов многозонного регулятора при параметрическом «эстафетном» алгоритме работы релейных элементов
ментов n = 3. Считаем, что пороги переключения РЭ1-РЭ3 удовлетворяют условиям b 1 > b2 > b3 и |-bj < |-b2| < |-b3| (рис. 3, а). В этом случае симметрией относительно нулевого уровня обладают пороги переключения ± b2 РЭ2, а пороговые уровни ± Ь 1 и ± b3 релейных элементов РЭ1, РЭ3 симметрично смещены в противоположных направлениях.
После включения МР и возникновения в нем режима устойчивых автоколебаний релейные элементы РЭ1, РЭ3 находятся в статических и противоположных по знаку выходного сигнала состояниях (рис. 3, в, д), а выходные импульсы YВЫХ (t) (рис. 3, е) формируются в первой модуляционной зоне МЗ1 ± А / 3 за счет переключений РЭ2 (рис. 3, г).
Считаем, что на вход МР подан сигнал 0 < XВХ< А/3 (рис. 3, б), что соответствует режиму работы преобразователя в первой модуляционной зоне МЗ1. Тогда в интервале t1 (рис. 3, е) сигнал YИ (t) (рис. 3 а) изменяется под действием разности сигналов - А / 3 + ХВХ, а в интервале t2 скорость нарастания выходной координаты интегратора И зависит от суммы этих сигналов
(рис. 3, а, б, е). В результате за период автоколебаний среднее значение Y0 выходных импульсов YВЫХ (t) (рис. 3, е) достигает величины, пропорциональной XВХ .
При изменении входного сигнала МР до уровня А/3 < XВХ< А (рис. 3, б, момент времени t03 ) происходит переориентация состояния РЭ3 (рис. 3, д), после чего он оказывается в режиме переключений, а РЭ1, РЭ2 находятся в статических состояниях YРЭ1(t) = YРЭ2(t) = - A/3 (рис. 3, в, г). В итоге МР переходит во вторую модуляционную зону МЗ2– четвертого квадранта статической характеристики Y 0 = f(ХВХ) (рис. 3, е, рис. 2, б).
При смене знака входного сигнала (рис. 3, б, интервал t05 < t < t07) до величины 0 > ХВХ > -А/3 РЭ3 переключается в исходное статическое состояние YРЭ3(t) = A/3 (рис. 3, д, момент времени t 05 ), и МР возвращается в первую модуляционную зону, формируемую за счет переключений РЭ2 (рис. 3, г, е).
Дальнейшее увеличений входного сигнала МР (рис. 3, б, интервал времени t > t07 ) влечет за собой переключение РЭ1 (рис. 3, в, момент време- ни t08 ) и перевод его в режим автоколебаний, что приводит к формированию импульсов YВЫХ (t) во второй модуляционной зоне МЗ2+ второго квадранта амплитудной характеристики Y0 = f(XBX) (рис. 2, б; 3, е).
Таким образом, создается «эстафетный» режим работы РЭ (рис. 3, в–д), когда они, в зависимости от знака и уровня сигнала XВХ (рис. 3, б), периодически переходят из статического режима работы в режим автоколебаний. Следует учитывать, что подобный режим работы МР позволяет лишь частично выровнять потери мощности между выходными каскадами релейных элементов, так как «эстафетный» режим зависит от знака и уровня сигнала управления. Тем не менее, подобное техническое решение может быть использовано как в силовых преобразователях, так и при построении слаботочных информационных МР, тем более что оно не сопряжено с дополнительными аппаратурными затратами, а подразумевает лишь специфическую настройку порогов переключения РЭ.
-
3. Многозонный регулятор
с число-импульсным «эстафетным» алгоритмом работы релейных элементов
Отмеченного недостатка МР с параметрической настройкой РЭ лишен МР, в частности, с число-импульсным алгоритмом «эстафетной» передачи автоколебательного режима последующему релейному элементу (рис. 4) [12].
В его состав, кроме основных элементов И, РЭi и 2 1, 2 2, входят генератор тактовых импульсов G и двоичный суммирующий счетчик СТ, дешифратор DC и кольцевой регистр RG. Генератор G формирует импульсы малой длительности YG (t) синхронно с моментами времени переключения любого из РЭ (рис. 5, б–д).
Управление RG производится с соответствующего выхода DC, определяющего некоторое заранее заданное число N0 (рис. 4; 5, е), при котором режим переключений должен передаваться на следующий релейный элемент.
Кольцевой регистр RG работает в коде «1 из n», где n – число разрядов регистра, равное числу «n» релейных элементов МР. При этом только один разряд RG находится в состоянии логической «1», а остальные в «0» (рис. 5, з–к). В исходном положении пороговые уровни удовлетворяют условию b1(t) < b2(t) < b3 (t) <...< bn (t) (рис. 5, а). Предполагается также наличие некоторого вакантного уровня ВУ < b1(t) и командного входа у релейных элементов РЭi (рис. 4), подача на который сигнала логической «1» с выхода RG обеспечивает выполнение условия |b i (t)| = |ВУ | (рис. 5, а).
Под действием импульса YG (t) (рис. 5, д) число N(t) в СТ увеличивается на единицу младшего разряда (рис. 5, е). При достижении в СТ некоторого наперед заданного числа N0 (рис. 5, е) де-
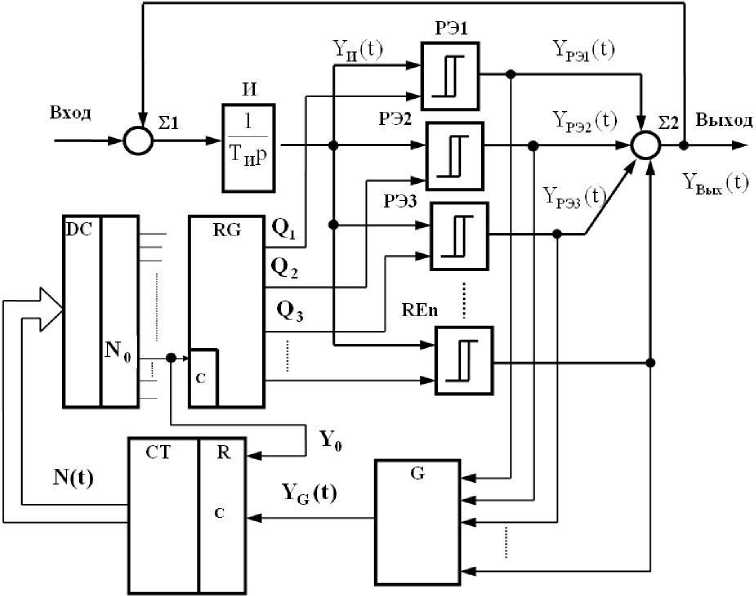
Рис. 4. Структурная схема многозонного регулятора с число-импульсным «эстафетным» алгоритмом работы релейных элементов
шифратор DC сигналом Y0 обнуляет СТ (рис. 5, е, ж) и одновременно перемещает «1» в следующий разряд RG (рис. 5, з–к, сигналы Q1 , Q2 , Q3 ). При этом уровень «ВУ» (рис. 5, а) занимается следующим релейным элементом МР. В результате релейные элементы РЭi последовательно переходят из статического режима в режим переключений и наоборот (рис. 5, б–г, сигналы YРЭ1(t) , YРЭ2 (t) , YРЭ3 (t) ).
В данном МР процесс счета жестко нормирован числом переключений силовых ключей и «эстафетное» управление РЭi фактически производится в функции потерь мощности при коммутации выходных каскадов многозонного регулятора. Неоднозначность счета возникает только на стадии смены модуляционных зон, когда СТ заносит в число переключений ведущего РЭ срабатывание ведомых релейных элементов. Подобный случай отображен импульсами «А», «В» на рис. 5, д. Так, например, импульс «А» принадлежит фронту выходного импульса YРЭ1(t) РЭ1 (рис. 5, б, д), но его учет производится в цикле (рис. 5, е), когда система осуществляет счет числа переключений РЭ2 (рис. 5, в, сигнал YРЭ2(t) ). Однако доля этой ошибки по сравнению с заданным числом N0 пренебрежимо мала, так как длительность счета продолжительности импульсного режима РЭi исчисляется, как правило, не менее чем единицами минут.
Число-импульсный «эстафетный» алгоритм работы РЭi, как показали экспериментальные исследования, позволяет на 15–25 % уменьшить массогабаритные показатели охладителей силовых ключей МР, либо при сохранении их первоначальных габаритов повысить частоту автоколебаний многозонного преобразователя и расширить, тем самым, его полосу пропускания.
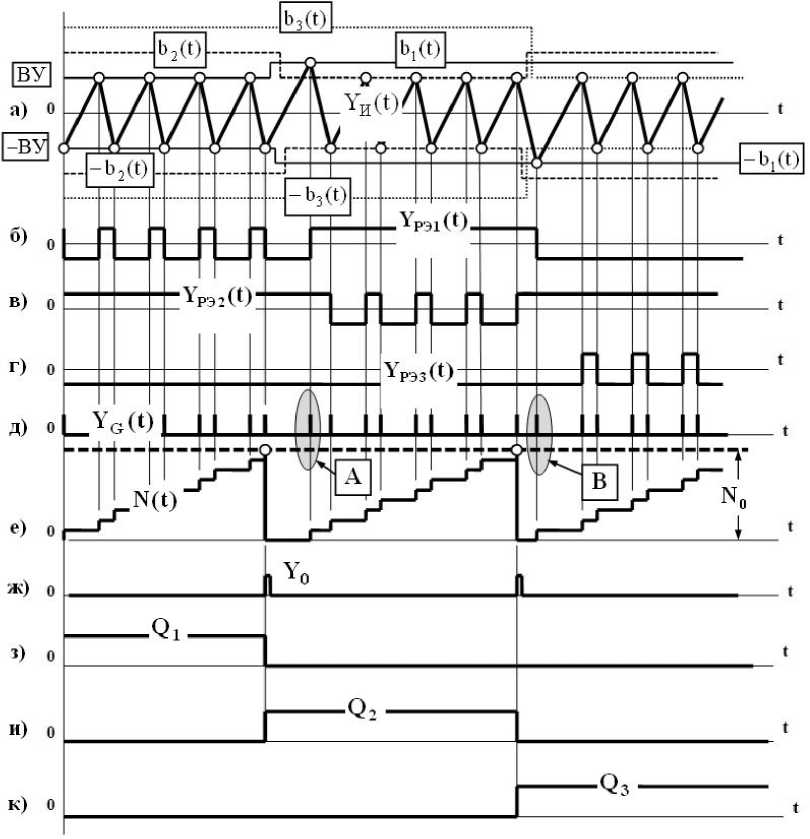
Рис. 5. Временные диаграммы сигналов многозонного регулятора при число-импульсном «эстафетном» алгоритме работы релейных элементов
-
4. Пример практического применения многозонного регулятора с «эстафетным» алгоритмом работы релейных элементов
Практическое применение МР иллюстрируется структурной схемой электронагревательной установки (рис. 6, а), которая, кроме МР, содержит электрическую печь, электронагреватели ТЭНA, ТЭНB, ТЭНC, включенные в каждую фазу А, В, С напряжения сети, датчик температуры ДТ, а также тиристорные ключи переменного напряжения КлА, Кл В , Кл С .
«Эстафетный» режим работы РЭi здесь создается по упрощенному, по сравнению со схемой на рис. 4, интервало-временному алгоритму [13], который не учитывает число переключений РЭi, а лишь задает с помощью генератора импульсов G, и кольцевого регистра RG фиксированное время работы РЭi в режиме автоколебаний путем перевода его порога переключения на вакантный уровень «ВУ» (рис. 5, а).
МР на входе и в цепи обратной связи содержит четырехполюсники К1(р), К2(р) и К3(р), которые определяют закон регулирования в системе: пропорциональный, интегральный, пропорционально-интегральный и т. д. При этом схемотехника регуляторов на основе МР [22] практически не отличается от известной из теории линейных операционных усилителей [23, 24].
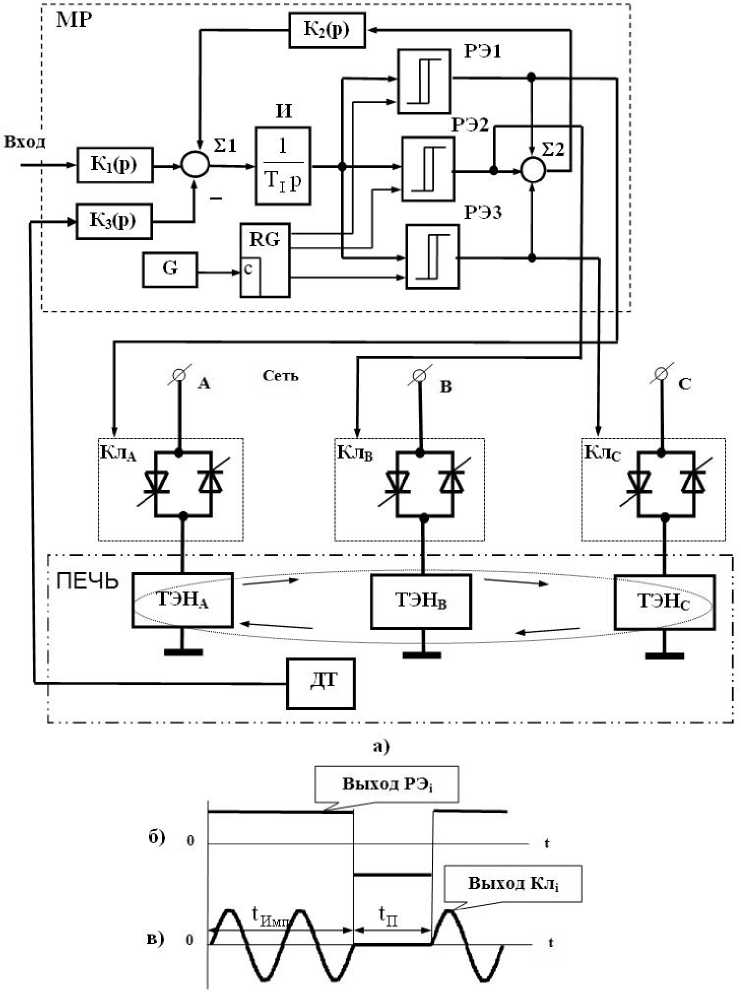
Рис. 6. Структурная схема (а) и временные диаграммы сигналов (б, в) многозонного регулятора переменного напряжения с интервало-временным алгоритмом работы электронагревателей
С помощью системы управления ключей Кл А , Кл В , Кл С (на рис. 6, а не показана) [24–26] на их выходе формируется сигнал, где интервалы tИмп импульса и tП паузы (рис. 6, б, в) соответствуют целому числу периодов напряжения сети. Тем самым уменьшается генерация высших гармоник в сеть.
При «эстафетном» режиме работы электронагревателей ТЭН A , ТЭН B , ТЭН C создается «вращающееся» тепловое поле, в результате чего снижается не менее, чем в 3–5 раз неравномерность температуры по объему печи (рис. 6, а). Подобные результаты были получены в системе терморегулирования сушильных камер 120ЕК-2 электроцеха ОАО «Челябинский трубопрокатный завод» [14–18, 26]. Выявлено, что данный эффект зависит от геометрических параметров и постоянной времени печи, расположения электронагревателей ТЭНA, ТЭНB, ТЭНC, скорости «эстафетного» режима работы МР, соотношения частоты автоколебаний МР и частоты сети и в настоящее время требует своего дальнейшего изучения.
Выводы
-
1. Рассмотрена базовая структура МР и ее основные характеристики. Отмечено, что наличие интегратора в прямом канале регулирования и замкнутый характер структуры МР обеспечивает его высокую статическую точность и помехоустойчивость. К числу недостатков базовой структуры МР следует отнести строгую иерархию режимов работы РЭ i , когда релейный элемент с минимальным значением порогов переключения постоянно находится в режиме переключений, а остальные РЭ i–1 выполняют вспомогательную функцию перевода МР в соответствующую модуляционную зону и фактически работают в статическом состоянии. При реализации МР на достаточно большую мощность нерациональность такого алгоритма управления выходными каскадами многозонного регулятора очевидна, так как основные потери мощности ложатся на выходные каскады ведущего релейного элемента, работающего в режиме переключений с частотой автоколебаний МР, в то время как ведомые релейные звенья функционируют в облегченном, с точки зрения нагрева их ключевых элементов, режиме.
-
2. Выравнивание потерь мощности между выходными ключами релейных элементов может быть осуществлено с помощью «эстафетных» алгоритмов работы РЭi, когда режим переключений через определенный промежуток времени передается от одного релейного элемента к другому. При этом достигается снижение массогабаритных показателей МР, либо обеспечивается возможность повышения частоты несущих колебаний МР и расширение за счет этого его полосы пропускания.
-
3. Предложен параметрический «эстафетный» алгоритм работы РЭ i , основанный на соответст-
- вующей настройке порогов переключения релейных элементов базовой структуры МР. При этом передача режима переключений от одного релейного элемента к другому определяется уровнем и знаком входного сигнала.
-
4. Рассмотрен число-импульсный «эстафетный» алгоритм работы РЭi, когда в МР режим автоколебаний передается другому релейному элементу через определенное число переключений предыдущего РЭ. При этом «выравниваются» потери мощности на переключения между выходными каскадами РЭ i .
-
5. Приведен пример практического применения МР в качестве регулятора температуры, где предложен интервало-временной алгоритм «эстафетной» работы РЭi, отличающийся от числоимпульсного алгоритма тем, что здесь не учитывается число переключений РЭi, а лишь задается с помощью внешнего генератора фиксированное время работы РЭ i в режиме автоколебаний. Наличие «эстафетного» режима работы релейных элементов МР позволяет снизить не менее, чем в 3 – 5 раз неравномерность температуры по объему электропечи.
Список литературы Многозонные частотно-широтно-импульсные интегрирующие регуляторы с "эстафетными" алгоритмами работы релейных элементов
- Брылина, О.Г. Оценка качества передачи гармонического воздействия в многозонных преобразователях с двухтакной широтно-и частотно-широтно-импульсной модуляцией/О.Г. Брылина//Вестник ЮУрГУ. Серия «Энергетика». -2014. -Вып. 14, -№ 1. -С. 48-53.
- Динамика линий связи с широтно-и частотно-широтно-импульсными носителями информации. Теория и практика/Л.И. Цытович, М.М. Дудкин, О.Г. Брылина, А.В. Тюгаев//Электротехника. -2014. -№ 4. -С. 2-9.
- Survey of automatic modulation classification techniques: classical approaches and new trends/O.A. Dobre, A. Abdi, Y. Bar-Ness, W. Su//Communications, IET. -2007. -Vol. 1, iss. 2. -P. 137-156 DOI: 10.1049/iet-com:20050176
- Analysis of static noise stability of the communication links with width-and frequency-width-pulse carrier of information/L.I. Tsytovich, O.G. Brylina, M.M. Dudkin et al.//Science and Education: materials of the IV international research and practice conference. -2013. -Vol. 1. -P. 144-150.
- Дудкин, М.М. Спектральные характеристики развертывающих преобразователей с широтно-импульсной и частотно-широтно-импульсной модуляцией/М.М. Дудкин, Л.И. Цытович, О.Г. Брылина//Электротехника. -2013. -№ 10. -С. 18-25.
- Brinkis, K. The automated control of a power system/K. Brinkis, A. Staltmanis//Baltic electrical engineering revier. -1997. -No. 2(6). -P. 39-44.
- Han, B.-M. Load simulator with power recovery capability based on voltage source converter-inverter set/B.-M. Han, B.-Y. Bae, Y.-S. Jeong//IEE Proc. Elec. Power. -2006. -Vol. 153, no. 6. -P. 891-897 DOI: 10.1049/ip-epa:20050461
- Брылина, О.Г. Статические и динамические спектральные характеристики многозонного преобразователя с частотно-широтно-импульсной модуляцией/О.Г. Брылина//Вестник ЮУрГУ. Серия «Энергетика». -2013. -Вып. 13, № 1. -С. 70-79.
- Пат. 2470360 Российская Федерация. Многозонный интегрирующий регулятор переменного напряжения с автоматическим резервированием каналов регулирования/Л.И. Цытович, О.Г. Брылина. -№ 2011139292/08(058668); заявл. 26.09.2011; опубл. 20.12.2012, Бюл. № 35. -17 с.
- Снижение уровня динамических потерь: «мягкая» коммутация и снабберы/А. Винтрич, У. Николаи, В. Турски и др.//Силовая электроника. -2013. -Т. 6, № 45. -С. 58-64.
- Надежность и качество: труды международного симпозиума/под ред. Н.К. Юркова. -Пенза: Пенз. гос. ун-т, 2006. -Т. 2. -334 с.
- А. с. 1336039 СССР, G06G7/12. Многозонный развертывающий преобразователь/Л.И. Цытович. -№ 4058307/24; заявл. 19.02.86; опубл. 03.04.87, Бюл. № 25. -6 c.
- А. c. 1446630 СССР, G06G7/12. Развертывающий преобразователь/Л.И. Цытович. -№ 4176683/24; заявл. 06.01.87; опубл. 23.12.88., Бюл. № 47. -7 с.
- Гусев, В.Г. Электроника и микропроцессорная техника: учеб. для вузов/В.Г. Гусев, Ю.М. Гусев. -4-е изд., доп. -М.: Высш. шк., 2006. -799 с.
- Брылина, О.Г. Многозонное развертывающее преобразование в системах автоматизации технологическими процессами: монография/О.Г. Брылина, Л.И. Цытович. -Челябинск: Издат. центр ЮУрГУ, 2014. -202 c.
- Пат. 2312452 Российская Федерация. Система управления группой электроприводов водных насосов/Л.И. Цытович, О.Г. Терещина, М.М. Дудкин. -№ 2006119760/09; заявл. 05.06.2006; опубл. 10.12.2007, Бюл. № 34. -12 с.
- Частотно-широтно-импульсный терморегулятор сушильной камеры с непрерывным тестированием сопротивления изоляции электротехнического изделия/Л.И. Цытович, О.Г. Брылина, М.М. Дудкин и др.//Вестник ЮУрГУ. Cерия «Энергетика». -2011. -Вып. 16, № 34. -C. 50-55.
- Брылина, О.Г. Регуляторы переменного напряжения с частотно-широтно-импульсной модуляцией/О.Г. Брылина//Вестник ЮУрГУ. Cерия «Энергетика». -2012. -Вып. 17, № 16. -C. 26-30.
- Цифровые электроприводы с транзисторными преобразователями/С.Г. Герман-Галкин, В.Д. Лебедев, Б.А. Марков, Н.И. Чичерин. -Л.: Энергоатомиздат. Ленингр. отд-ние, 1986. -248 с.
- Новый алгоритм широтно-импульсной модуляции выходного напряжения трехфазного автономного инвертора с нейтральной точкой/В.И. Сенько, С.А. Лебеденко, А.П. Калиниченко и др.//Техническая электродинамика. -1994. -№ 1. -С. 13-18.
- Numerical optimization of an active voltage controller for high-power IGBT converters/Bryant Angus Т., Wang Yalan, Finney Stephen J. et al.//IEEE TRANS. Power electron. -2007. -vol. 22, no. 2. -P. 374-383 DOI: 10.1109/TPEL.2006.889895
- Волович, Г.И. Схемотехника аналоговых и аналогово-цифровых электронных устройств/Г.И. Волович. -М.: ИД «Додэка-XXI», 2005. -527 с.
- Guerrero-Linares, L. Non-idealities in analog circuits design: What does it really mean?/L. Guerrero-Linares, F. Sandoval-Ibarra, J.R. Loo-Yau//Circuits and Systems (MWSCAS). 2012 IEEE 55th International Midwest Symposium. -2012. -P. 586-589.
- The integrating AC regulator with interval-code synchronization for thermoregulating systems/L.I. Tsytovich, R.M. Rakhmatulin, M.M. Dudkin et al.//Science, Technology and Higher Education: materials of the international research and practice conference. -Westwood -Canada: Publishing office Accent Graphics communications, 2012. -Vol. II. -P. 559-566.
- Пат. 2490685 Российская Федерация. Частотно-широтно-импульсный регулятор переменного напряжения с симметрированной нагрузкой/Л.И. Цытович, О.Г. Брылина, М.М. Дудкин, А.В. Тюгаев; заявитель и патентообладатель Юж.-Урал. гос. ун-т. -№ 2012134225/08; заявл. 09.08.2012; опубл. 20.08.2013, Бюл. № 23. -13 с.
- Дудкин, М.М. Устройства и системы управления силовыми вентильными преобразователями для потребителей с нестабильными параметрами источника электроснабжения: дис. … д-ра техн. наук. -Челябинск: ЮУрГУ, 2014. -482 с.
