Мобильная система для уничтожения сорных растений с использованием высоковольтного разряда и обратной связи на основе датчика тока

Автор: Угловский А.С., Семеренко Н.Ю.
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Электротехнологии, электрооборудование и энергоснабжение агропромышленного комплекса
Статья в выпуске: 4 (45), 2024 года.
Бесплатный доступ
В данной статье описывается разработка и тестирование автономной роботизированной системы, предназначенной для борьбы с сорными растениями с помощью высоковольтного разряда. В системе реализован механизм обратной связи. Основой устройства является мобильная платформа с шестиколесным приводом и подвеской типа «Багги». В ее состав входят источник высокого напряжения, способный генерировать напряжение до 15 кВ, манипулятор с электродами для механического и электрического удаления сорных растений, датчик для измерения потребляемого тока и одноплатный компьютер для управления и обработки данных. Принцип работы системы заключается в том, что при соприкосновении высоковольтного электрода с сорных растений наблюдается увеличение тока. После завершения процесса ток существенно уменьшается. Средняя энергия для уничтожения сорного растения (молочай) была оценена в 200 Дж при разрядном токе в 10 А. На основе измерений потребляемого тока была проведена калибровка механизма обратной связи для определения и обнаружения уничтожения сорных растений. Исследования показали, что предлагаемая схема управления значительно повышает эффективность робототехнических систем, обеспечивая высокую точность и надежность при автоматизации агрономических процессов.
Уничтожение сорных растений, высоковольтный разряд, механизм обратной связи, багги, автономная платформа
Короткий адрес: https://sciup.org/147247516
IDR: 147247516 | УДК: 621.311.6
Mobile weed killing system using high voltage discharge and current sensor feedback
This paper describes the development and testing of an autonomous robotic system designed to combat weeds using a high-voltage discharge. The system implements a feedback mechanism. The basis of the device is a mobile platform with a six-wheel drive and a buggy-type suspension. It consists of a high-voltage source capable of generating voltage up to 15 kV, a manipulator with electrodes for mechanical and electrical removal of weeds, a sensor for measuring the consumed current, and a single-board computer for control and data processing.The principle of operation of the system is that when the high-voltage electrode comes into contact with the weed, an increase in current is observed. After the process is complete, the current decreases significantly. The average energy for the destruction of a weed (spurge) was estimated at 200 J with a discharge current of 10 A. Based on the measurements of the consumed current, the feedback mechanism was calibrated to determine and detect the destruction of weeds. Research has shown that the proposed control scheme significantly increases the efficiency of robotic systems, ensuring high accuracy and reliability in the automation of agronomic processes.
Текст научной статьи Мобильная система для уничтожения сорных растений с использованием высоковольтного разряда и обратной связи на основе датчика тока
Введение. Борьба с сорными растениями является важнейшей задачей в сельскохозяйственном секторе. Традиционные методы; такие как использование гербицидов и механическая прополка, имеют свои недостатки: они могут негативно влиять на окружающую среду, требуют значительных временных затрат и не всегда эффективны против всех видов сорных растений.
С каждым годом растет интерес к инновационным решениям, таким как применение электрического тока для борьбы с сорными растениями. Электрический метод уничтожения сорных растений предлагает экологичную и безопасную альтернативу. Сегодня электроэнергия активно используется в различных отраслях промышленности, и идея ее использования для уничтожения сорных растений обсуждается уже несколько десятилетий. Некоторые исследователи считают такой подход идеальным и безвредным способом борьбы с нежелательной растительностью. Высоковольтный ток воздействует на корни растений, существенно ограничивая их потенциал к отрастанию, при этом не загрязняя почву и пищевые цепи.
Несколько исследований продемонстрировали успешное применение электроэнергии для уничтожения сорных растений. Например, в одном из самых ранних экспериментов для 26
борьбы с сорными растениями использовались высоковольтные разряды (от 2 до 30 кВ). Результаты показали, что более высокое напряжение приводит к большей интенсивности и скорости уничтожения. Это подтверждает, что электрический метод является быстрым и эффективным средством, способным конкурировать с химическими методами.
Целью данного исследования является создание автоматизированной системы с механизмом обратной связи на основе контроля потребляемого электрического тока для целенаправленного уничтожения сорных растений в агрономической практике.
Материалы и методы. В данном исследовании была разработана автоматизированная система уничтожения сорных растений, включающая в себя мобильную платформу, высоковольтный источник, манипулятор и систему управления.
Конструкция мобильного робота спроектирована с использованием шестиколесного привода и подвески типа «Багги» (Рисунок 1). Такая конструкция обеспечивает высокую проходимость и устойчивость на неровных поверхностях.
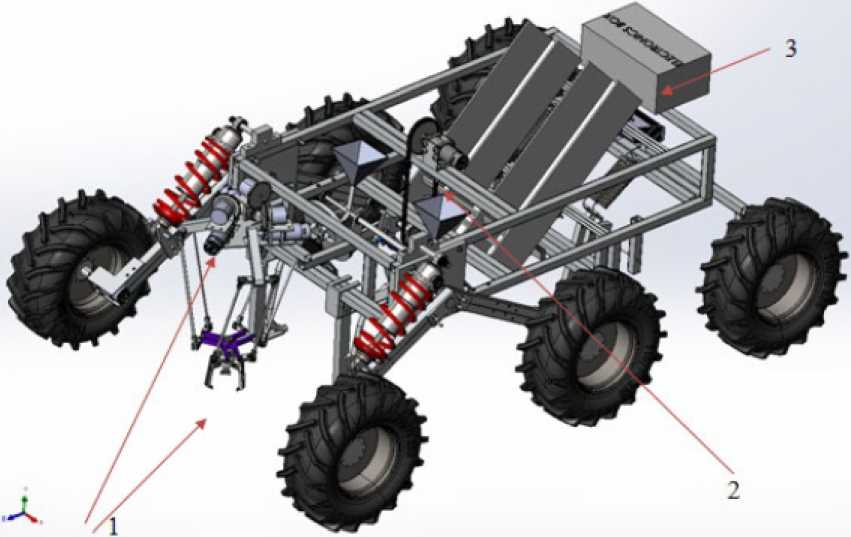
Рисунок 1 - Схема мобильной платформы робота
1 - манипулятор с электродвигателями, 2 — электропривод механизма подачи семян, 3 - блок системы управления
Основные элементы конструкции:
Электропривод: Шесть двигателей постоянного тока, установленных на колесах, обеспечивают движение робота. Три серводвигателя обеспечивают позиционирование манипулятора. Два электропривода отвечают за механизм подачи семян и посадку рассады.
Колеса: Шесть колес с глубокими протекторами для лучшего сцепления с землей.
Подвеска багги: Система подвески, которая позволяет колесам колебаться независимо, улучшая мобильность на неровных поверхностях.
Блок управления: Блок, который позволяет мобильному роботу выполнять все операции.
Система управления электроприводами мобильного робота
Мобильный робот управляется платой Raspberry Pi, которая обеспечивает следующие функции [1-4]:
Соор данных с датчиков: Raspberry Pi получает информацию от датчика тока и камеры, которая обнаруживает сорные растения.
Анализ данных: Raspberry Pi анализирует собранные данные и принимает решения относительно действий робота.
Управляющие сигналы: Raspberry' Pi отправляет управляющие сигналы на электроприводы, отвечающие за движение колес, позиционирование манипулятора и подачу высокого напряжения. Характеристики электроприводов.
Электрическая схема (рисунок 2) представляет собой драйвер для управления четырьмя серводвигателями манипулятора и устройства для посадки рассады. На схеме показаны четыре драйвера STK672-080-E (UI - U4), отвечающие за управление двигателями. Разъем J2 имеет 10 контактов, 9 из которых являются GPIO (общий контакт - GND), используемые для управления двигателями. Управляющие сигналы для двигателей передаются на контроллер через контакты 8, 9, 10, 11. 12, 13, 14 и 15. Сигнал «Enable», отвечающий за включение и выключение двигателя, подается на общий контакт 1.
Для драйвера требуются два разных источника питания: управляющее напряжение 5 В и рабочее напряжение в диапазоне от 12 до 48 В. Контроллер является основной частью системы, отвечающей за точные движения механизмов мобильного робота. Драйвер STK672-08 О-Е с помощью сигналов с разъемов (например, J3, 14 и т. д.) управляет несколькими шаговыми двигателями (Ml, М2 и т. д.). В зависимости от выбранного способа возбуждения и сигнала C’LK драйвер обеспечивает плавную работу и необходимую скорость всех двигателей. В зависимости от состояния выводов Ml, М2 и М3 можно переключать способы управления двигателями, что позволяет системе подстраиваться под текущие задачи (перемещение, удержание, разгон и торможение). Предложенная схема может быть применима для колесных пар мобильного робота и устройства подачи семян.
Механизм уничтожения сорных растений включает в себя следующие компоненты:
-
1) Источник высокого напряжения: преобразует 24 В постоянного тока от аккумуляторов в 15 кВ переменного тока. Здесь используется высоковольтный преобразователь на основе импульсного трансформатора, управляемый Raspberry' Pi.
-
2) Система позиционирования: дельта-робот, состоящий из трех сервоприводов, обеспечивает точное позиционирование манипулятора для контакта с сорным растением
-
3) Манипулятор: дельта-робот оснащен 3D-печатным захватом с винтовым механизмом и тремя пальцами, которые захватывают сорное растение.
-
4) Электроды: манипулятор имеет электроды, которые подают высоковольтный разряд на сорное растение.
Механизм обратной связи в этой системе основан на измерении тока, потребляемого от источника высокого напряжения (рисунок 3). Этот механизм включает в себя:
-
1) Датчик тока: ACS712 измеряет ток, протекающий через электроды.
-
2) Анализ данных: Raspberry' Pi анализирует данные с датчика тока, определяет момент контакта электродов с сорным растением (значительное увеличение тока) и момент уничтожения сорного растения (уменьшение тока).
-
3) Управляющие сигналы: Raspberry Pi на основе полученной информации управляет работой электроприводов для перемещения манипулятора к следующему сорному растению или, если сорное растение не было уничтожено за отведенное время, для перемещения к другому.
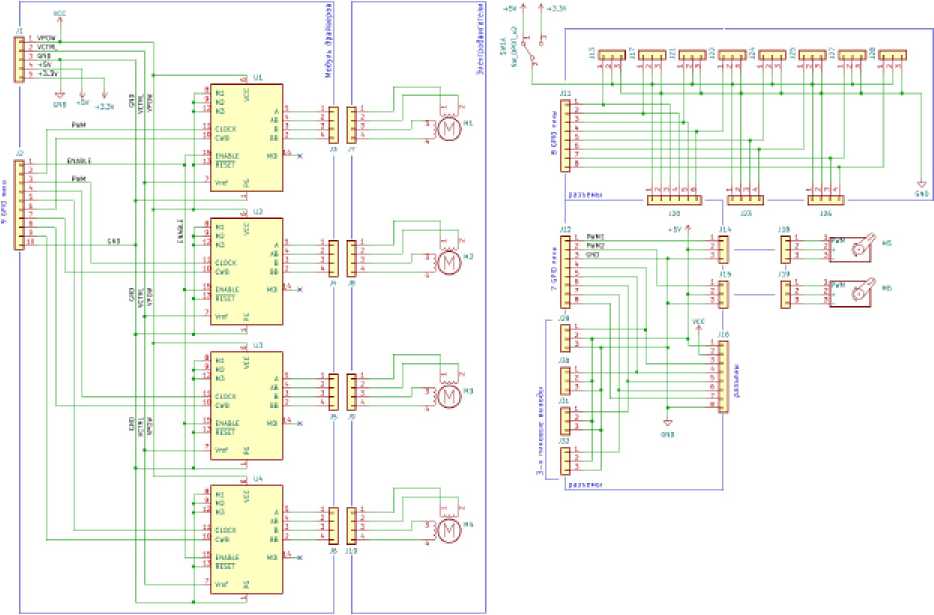
Рисунок 2 — Электрическая схема драйверов для управления серводвигателями манипулятора (Ml-М3), устройством посадки рассады (М4) и позиционированием видеокамеры (М5-М6)
Модуль усилителя напряжения (2) преобразует 12 В постоянного тока в 200 В переменного тока, а повышающий трансформатор (3) увеличивает это напряжение до 15 кВ переменного тока. Высоковольтный электрод (4), подключенный к выходу трансформатора, подает высокое напряжение на сорное растение (5). Второй электрод, заземляющий электрод (6), обеспечивает замыкание цепи через почву.
Когда высоковольтный электрод касается сорного растения, через него начинает протекать электрический ток величина которого измеряется датчиком тока (1). Ток зависит от сопротивлений сорного растения, почвы и воздуха.
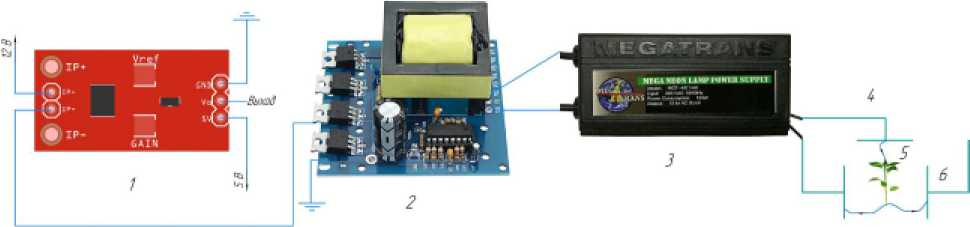
Рисунок 3 - Основная схема высоковольтного источника с механизмом обратной связи (1-Датчик электрического тока, 2- Модуль повышения напряжения 200 В, 3- повышающий трансформатор 15 кВ. 4- Высоковольтный электрод. 5- Сорное растение, б- Заземляющий электрод)
Манипулятор состоит из двух электродов, установленных на конце дельта-робота (рисунок 4). Один электрод используется для механического удаления сорных растений, а второй - для электрического разряда. При подаче высокой электрической энергии почва и воздух, благодаря своей высокой электрической прочности, остаются невредимыми, но куст сорного растения, ввиду своей ограниченной электрической прочности, нагревается, что приводит к испарению биомассы и разрушению его ткани [5-8]. В конечном итоге внутренняя структура куста сорного растения разрушается и выходит из цепи, а электрический ток в датчике уменьшается до пренебрежимо малого значения.
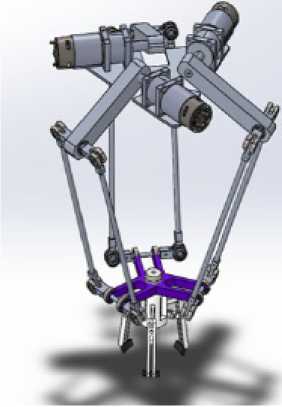
Рисунок 4 — Схема манипулятора робота
Система управления основана на микроконтроллере, который получает данные от датчика тока и управляет работой источника высокого напряжения и манипулятора. Датчик тока ACS712 используется для измерения потребляемого электрического тока. Механизм обратной связи основан на контроле потребляемого электрического тока. При соприкосновении электрода с сорным растением ток резко увеличивается, а после уничтожения сорного растения ток уменьшается. Такое решение позволяет системе определять, какие кусты были уничтожены, и оптимизировать работу платформы.
Результаты.
Для оценки эффективности системы с обратной связью по сравнению с системой без обратной связи было проведено сравнительное исследование. Результаты, представленные в таблицах 1 и 2, показывают, что система с обратной связью (20,5 ± 1,15 кустов) значительно эффективнее системы без обратной связи (19,0 ± 1,20 кустов) в уничтожении сорных растений (р<0,05, t(8)=3,86). Сорные растения выбирались по размеру. На рисунке 5 приведен график расхода энергии на уничтожение сорных растений с механизмом обратной связи. Необходимая энергия для уничтожения сорного растения (осот) при разрядном токе в 10 А находится в диапазоне от 40 до 75 Дж. Для молочая средняя энергия уничтожения составляет 200 Дж.
Таблица 1 - Сравнение эффективности уничтожения сорных растений в режимах работы с обратной связью и без нее
|
№ |
Количество уничтоженных сорных растений |
|
|
Состояние с обратной связью |
Состояние без обратной связи |
|
|
1 |
27 |
19 |
|
2 |
24 |
23 |
|
3 |
23 |
17 |
|
4 |
28 |
18 |
|
5 |
24 |
21 |
График потребления энергии для уничтожения сорняков
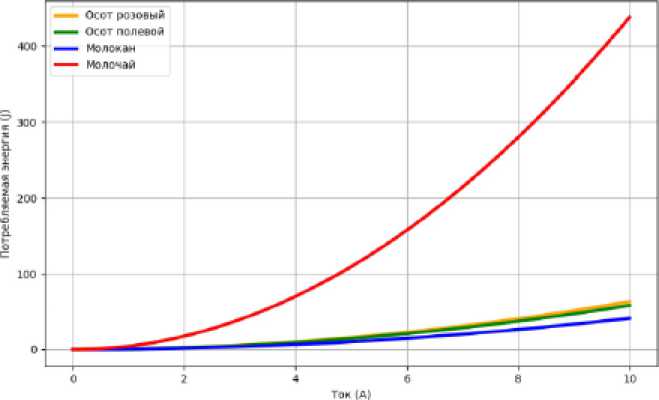
Рисунок 5 - График расхода энергии на уничтожение сорных растений с механизмом обратной связи
Таблица 2 - Сравнение режимов работы системы уничтожения сорных растений с механизмом обратной связи
|
Параметры |
Без обратной связи |
С обратной связью |
|
Среднее значение |
19.6 |
25,2 |
|
Стандартное отклонение (SD) |
2.41 |
2,17 |
|
t-критерий Стьюдента (t) |
3,86 |
- |
|
Степени свободы (df) |
8 |
- |
|
Достигнутый уровень значимости (Sig (2-tailed)) |
0,005 |
- |
В таблице 2 среднее значение для режима работы без обратной связи составляет 19,6, что значительно ниже среднего значения с обратной связью (25,2). Это говорит о том, что механизм обратной связи позволяет более точно настраивать параметры в системе управления.
Более низкое стандартное отклонение в системе с обратной связью (2,17) указывает на более стабильные и предсказуемые результаты по сравнению с системой без обратной связи (МО-
Значение t (3,86) указывает на статистически значимую разницу между двумя режимами, что подтверждается низким уровнем значимости (0,005) — что указывает на то, что разница между двумя группами статистически значима. Другими словами, вероятность того, что наблюдаемая разница произошла случайно, очень мала.
Значение степеней свободы 8 указывает на то. что в анализе было использовано 9 наблюдений, что также подтверждает правильность расчетов.
Выводы
Сравнительный анализ, проведенный в таблице 1, показал, что система с механизмом обратной связи значительно превосходит систему без него, уничтожая в среднем 27 кустов сорных растений против 20. Статистический анализ подтвердил значимость этих различий (р<0,05), что свидетельствует о положительном влиянии обратной связи на эффективность системы.
Также была проведена оценка различных методов борьбы с сорными растениями Высоковольтные системы, особенно с обратной связью, оказались единственными, не имеющими побочных эффектов и продемонстрировавшим высокую эффективность в работе.
Полученные результаты открывают новые возможности для автоматизации борьбы с сорными растениями и подчеркивают необходимость дальнейших исследований в этой области для оптимизации системы и ее применения в реальной агротехнической практике.
Список литературы Мобильная система для уничтожения сорных растений с использованием высоковольтного разряда и обратной связи на основе датчика тока
- Угловский А. С., Семеренко Н. Ю. Классификация болезней растений с использованием алгоритма глубокого обучения // Автоматизация. Современные технологии. - 2024. - Т. 78, № 8. - С. 343-349. EDN: DMKHCL
- Угловский А. С., Семеренко Н. Ю. Компьютерное моделирование системы управления четырёхколёсным мобильным роботом в пакете Simulink // Вестник АПК Верхневолжья. - 2024. - № 1(65). - С. 128-135. EDN: AGZIDT
- Угловский А. С. Система управления движением мобильного робота // Вестник АПК Верхневолжья. - 2024. - № 2(66). - С. 98-108. EDN: WFPSEJ
- Угловский А. С., Семеренко Н. Ю. Моделирование работы мобильного робота для обоснования его функциональных параметров и алгоритма управления // АгроЭкоИнженерия. - 2023. - № 4(117). - С. 57-72. EDN: NNUDIN
- Юдаев И. В. Электроимпульсная энергосберегающая технология борьбы с сорной растительностью: автореферат дис. … д-ра техн. наук. - М., 2012. - 36 с. EDN: VGGXWL
- Akiyama H. Streamer discharges in liquids and their applications // IEEE Transactions on Dielectrics and Electrical Insulation. - 2000. - Vol. 7. - No. 5. - P. 646-653. EDN: YFYWYR
- Sun A. B., Teunissen J., Ebert U. The inception of pulsed discharges in air: simulations in background fields above and below breakdown // J. Phys. D, Appl. Phys. - 2014. - 47. - P. 445205. DOI: 10.1088/0022-3727/47/44/445205 EDN: UQDNST
- Yudaev I. V., Daus Yu. V., Panchenko V. A., Bolshev V. E. Influence of factors determining weeds' plant tissue reaction to the electric pulse damage impact // Agriculture. - 2023. - Vol. 13, No. 5. - P. 1099.
