Модальное управление асинхронным электроприводом тележки мостового крана с наблюдающим устройством

Автор: Пахомов А. Н., Федоренко А. А., Чертыков П. Н.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 5 т.15, 2022 года.
Бесплатный доступ
Цель работы: разработка системы модального управления для электропривода перемещения тележки мостового крана с демпфированием колебаний груза. В качестве объекта исследования рассмотрена система, состоящая из асинхронного управляемого электропривода, тележки мостового крана, подвески и груза. Методы исследования: для достижения поставленной цели использовались методы теории автоматического управления, в том числе методы операторного исчисления и модального управления. Численные исследования процессов в разрабатываемой системе управления выполнены в вычислительной среде MATLAB (пакет прикладных программ SIMULINK). Результаты работы: предложены метод и структура системы автоматического подавления колебаний груза, свободно подвешенного на канате, на основе модального регулятора скорости и наблюдающего устройства. Разработаны модальный регулятор и наблюдатель скорости перемещения груза. Приведены графики переходных процессов, которые показывают эффективность работы системы управления.
Модальное управление, электропривод тележки, мостовой кран, переходный процесс, наблюдающее устройство
Короткий адрес: https://sciup.org/146282497
IDR: 146282497 | УДК: 62-83:621.316.71 | DOI: 10.17516/1999-494X-0419
Modal control of asynchronous electric drive for a trolley of a bridge crane with observing device
Purpose of the work: development of a modal control system for an electric drive for moving a trolley of a bridge crane with damping of load vibrations. As an object of research, a system consisting of an asynchronous controlled electric drive, an overhead crane trolley, suspension and load is considered. Research methods: methods of the theory of automatic control, including methods of operator calculus and modal control, were used to achieve this goal. Numerical studies of processes in the control system under development are performed in the MATLAB computing environment (SIMULINK application software package). Results of the work: the method and structure of the system of automatic suppression of vibrations of a load freely suspended on a rope based on a modal speed controller and an observing device are proposed. A modal regulator and an observer of the speed of cargo movement have been developed, graphs of transients are shown that show the efficiency of the control system.
Текст научной статьи Модальное управление асинхронным электроприводом тележки мостового крана с наблюдающим устройством
В качестве грузоподъемных механизмов на промышленных предприятиях широко используют мостовые краны. При перемещении тележки и моста крана неизбежно возникает раскачивание подвешенного груза. Около 20 % времени полного цикла перегрузочных операций затрачивается на ожидание завершения колебаний груза, что существенно снижает производительность и усложняет работу оператора. Кроме того, раскачивание груза приводит к увеличению динамических нагрузок на приводы и металлические конструкции крана [1].
В данной статье рассматривается способ подавления колебаний груза при помощи модального управления электроприводом перемещения тележки мостового крана с использованием наблюдателя. Определение структуры системы автоматического управления скоростью груза рассматривается как двухэтапный процесс. На первом этапе синтезируется модальный регулятор в предположении, что все переменные состояния системы доступны измерению. На втором – синтезируется и включается в структуру системы наблюдатель переменных труднодоступных непосредственному контролю.
Синтез модального регулятора
Для конкретности в качестве объекта исследования выберем электропривод перемещения тележки мостового крана с подвешенным грузом, однако всё изложенное справедливо и для электроприводов перемещения моста и подъёма груза.
БК АД
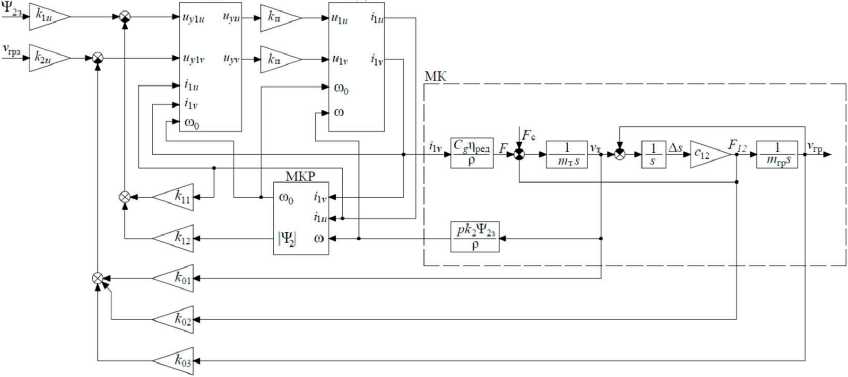
Рис. 1. Структурная схема электропривода перемещения тележки с грузом с модальным управлением
Fig. 1. Block diagram of an electric drive for moving a truck with a load with modal control
Структурная схема системы автоматического управления скоростью перемещения груза (рис. 1) составлена в предположении, что все переменные состояния объекта исследования доступны измерению. В основе этой структурной схемы лежит структурная схема системы векторного частотного управления скоростью асинхронного двигателя с модальным регулятором, рассмотренная в [2].
На рис. 1 блоки АД, БК, МКР – это структурные схемы асинхронного двигателя (АД) (в переменных I 2 -Ψ 2 ), блока компенсации внутренних перекрестных связей структурной схемы АД и, соответственно, структурная схема электромагнитного контура ротора (см. [2, 3]).
Коэффициенты обратных связей k 11 , k 12 и k 01 , k 02 , k 03 в совокупности с соответствующими сумматорами и узлами сравнения образуют двухканальный модальный регулятор. Первый канал ( k 11 , k 12 ) обеспечивает стабилизацию потокосцепления ротора АД, а второй ( k 01 , k 02 , k 03 ) – формирует диаграмму скорости перемещения груза ν гр . Коэффициенты k 1 u и k 2 u согласуют сигналы задания потокосцепления ротора Ψ 2з и скорости перемещения груза ν грз с их реальными выходными значениями Ψ 2 и ν гр . Преобразователь частоты по каждому из каналов управления учтён безынерционным звеном с коэффициентом передачи k п .
Механическая часть объекта управления, которая состоит из тележки с приведенной к валу двигателя массой m т и груза массой m гр , подвешенного на канате длиной h , на рис. 1 представлена структурной схемой (блок МК) двухмассовой системы с упругой связью [4].
Здесь Cg = Ърк^т11 – коэффициент связи электромагнитного момента с координатой i 1ν вектора тока статора АД; p , k 2 – число пар полюсов АД и коэффициент электромагнитной связи ротора; η ред – КПД редуктора; ρ – радиус приведения угловой скорости двигателя к линейной скорости тележки; с 12 – коэффициент упругой механической связи между массами тележки и груза; ν т – скорость перемещения тележки; ν гр – скорость груза; F c – cила, препятствующая передвижению тележки с грузом; F 12 – сила, прикладываемая к грузу при его отклонении от вертикального положения; ∆ s – отклонение груза от вертикального положения.
Поскольку структурная схема объекта управления на рис. 1 отличается от рассмотренной в [2] только структурой механической части МК, то структура и процедура синтеза модального регулятора по каналу стабилизации потокосцепления Т 2 ротора АД идентичны рассмотренным в [2] и в настоящей работе не рассматриваются.
Канал же формирования скорости перемещения груза ν гр отличается как структурой, так и набором переменных состояния. Рассмотрим синтез модального регулятора для этого канала.
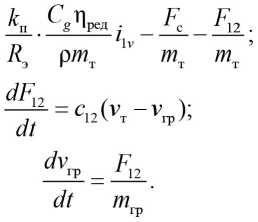
Для рассматриваемого класса механизмов инерционность электромагнитных контуров АД многократно меньше инерционности механической части системы, поэтому представляется правильным на этапе синтеза ею пренебречь. Тогда объект управления описывается следующей системой уравнений состояния [4]:
^Vt dt
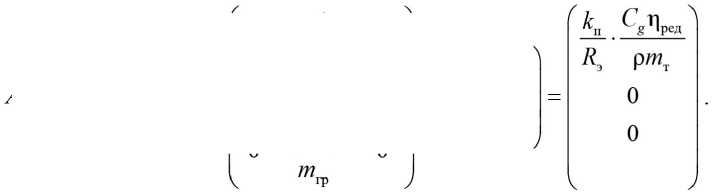
Этим уравнениям соответствуют матрицы параметров А и входа В:
|
^^п |
<7[2 |
w13 |
0 |
1_ 7ИТ |
|||||
|
0 |
|||||||||
|
А = |
^21 |
Я22 |
^23 |
= |
С12 |
0 |
-С12 |
и В = |
^21 |
|
<^31 |
^32 |
^33 у |
0 |
1 |
0 |
^^31> |
|||
Тогда, с учётом структуры модального регулятора скорости груза v гр (см. рис. 1), характеристический полином замкнутой по вектору состояния системы определяется выражением [5]:
д(5) = |5-£-Ц-5-^)|
где – матричный коэффициент модального регулятора; E – единичная матрица.
С учётом (1) выражение (2) равно:

^ОХ^п^^Лред ^02 С12 ^11 (-g Пред с12(^гр ^т) (^03 ^01 )с12^"п^ ^Пред
где
Аэртт К^т^ т^т^ К^рт^т^
Выбрав в качестве желаемого характеристический полином фильтра Баттерворта третьего порядка
D^ — -У + 2со^5 + Зоэ^^ + со^
обеспечивающий перерегулирование σ = 7,1 % и время переходного процесса τ пп = 5,9ω б -1[5], и приравняв его к уравнению (3), определим коэффициенты модального регулятора:
la^Rpm ^эР^Юб^т-^^-^тЯ
^oi = , г ; ^02 = —к-------- 77-----------;
^п^^Лред ^rp^lZ^n^g^pefl
R3pmTto6 I wrp(o6 + 2с12 I
Для численных расчётов использованы параметры АД RA 250 M 2 ( P н = 55 кВт, n н = 2950 об/ мин). Приведенная масса тележки, масса груза и длина каната приняты равными: m т = 133,5 т; m гр = 150 т; h = 30 м. Базовая частота, определяющая быстродействие системы, выбрана из условия ограничения бросков переменных состояния на допустимом уровне: ω б = 1,18 с-1. При этом численные значения коэффициентов модального регулятора: k 01 = 0,135; k 02 = 2,45 ∙ 10–6; k 03 = 0,153.
Графики изменения скорости груза ν гр и скорости тележки ν т при Ψ 2 = const и ступенчатом задании ν грз приведены на рис. 2.
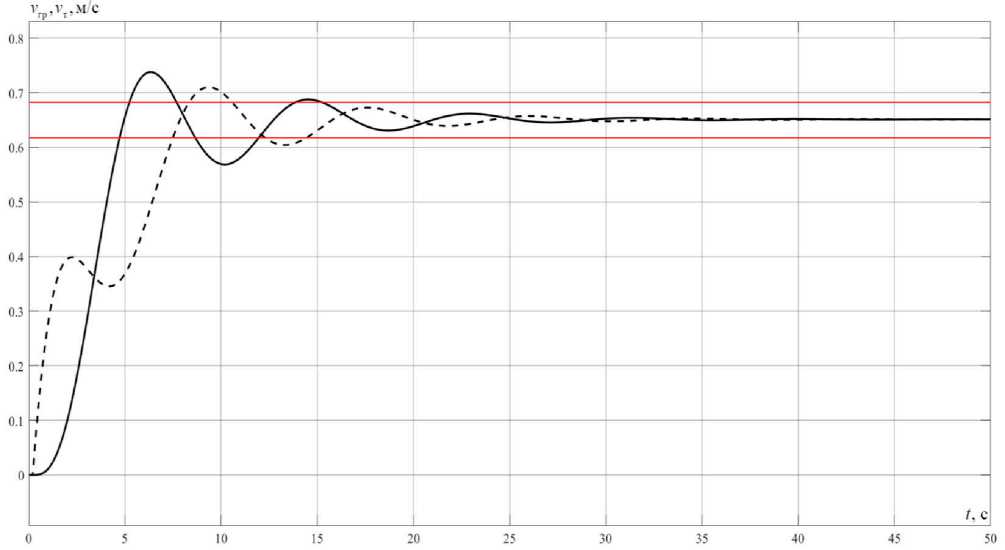
Рис. 2. Переходные процессы скорости груза и тележки (где сплошная линия – скорость груза νгр, пунктирная – скорость тележки νт)
Fig. 2. Transients of the speed of the load and the trolley (where the solid line is the speed of the load ν гр , the dotted line is the speed of the trolley ν т )
Как видно, рассматриваемая система автоматического управления скоростью перемещения груза обеспечивает переходный процесс, близкий к желаемому ( t пп = 15 c, σ гр = 13,19 %), кардинально устраняя при этом его колебательность – для сравнения можно взять результаты работы [6].
Синтез наблюдающего устройства
Синтез модального регулятора осуществлён в предположении, что все переменные состояния системы доступны измерению (наблюдаемы), однако сила F 12 и скорость пере -мещения груза ν гр таковыми не являются. Поэтому определим их с помощью наблюдающего устройства (НУ).
В самом общем случае математическая модель наблюдателя в векторно-матричной форме имеет вид [5]:
Х(0 = ЛХ(0 + BU(0 + G(Y^ - СХ(^ . (4)
Здесь переменные Х(Л - это переменные, определяемые наблюдателем; Y ( t ) - переменные, доступные измерению; U ( t ) - входные переменные объекта; A - матрица параметров объекта; B - матрица входов объекта; C - матрица размерности ( r х n ) выходов объекта, доступных измерению; G – матрица размерности (n×r) коэффициентов регулятора НУ.
Уравнение (4) в операторной форме имеет вид:
sX^ =(Л- GC)X(s) + BU(s) + G(Y(s)) .
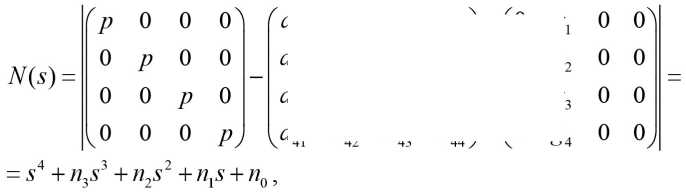
Ему соответствует характеристический полином:
7V(5) = |s£-(^-GC)|.
При синтезе НУ будем считать известным задающий сигнал uyv напряжения на входе преобразователя и доступным измерению сигнал скорости перемещения тележки у т .
Переменные, не доступные измерению и определяемые наблюдателем: проекция тока статора i 1 v , сила, прикладываемая к грузу при его отклонении от вертикального положения, F 12 и скорость перемещения груза v гр .
Тогда, согласно [2, 3] и структурной схеме рис. 1 системы автоматического управления, уравнения наблюдателя в скалярной форме будут иметь вид:

Отметим, что здесь в модели объекта наблюдения учтена и электромагнитная инерция обмоток АД.
Таким образом, для рассматриваемого объекта матрица-столбец коэффициентов наблюдателя равна:

Матрица-строка переменных, доступных измерению:

Матрица динамики:
|
М^з |
0 |
> 0 |
||
|
Т3 |
RJ3^ |
|||
|
о а а |
1 |
|||
|
а^, аэ. |
g *ред |
0 |
0 |
|
|
А = = |
pm^ |
/ит |
||
|
а31 а„ а„ а34 |
||||
|
0 |
А 2 |
0 |
—Аг |
|
|
^41 ^42 w43 ^44/ |
। |
|||
|
0 |
0 |
0 |
||
|
V |
П1гр |
2 |
Характеристический полином НУ определяется выражением:
1 . ft ^g Пред §2 ft A2(wt + ftp) ^Р’^^з^Пред
|
Ai |
ft 2 |
ft3 |
ft4^ |
'0 |
gl |
|
|
^21 |
а22 |
а23 |
ti24 |
+ |
0 |
§2 |
|
fti |
ft 2 |
ft3 |
ft 4 |
0 |
ft |
|
|
а41 |
ft2 |
O43 |
ft4> |
<° |
ft |
где
4 pmT Гэ mT m^^ R3I3pzmT
„ - ft£12 ft , ft£12 , A2^Ap +mr) . _ РПАг^Пред ftA2 , ftc12 , ^Р^гз^ хПредАг
/ftp Тэтт mT T3mrpmT pmTmTp T^ T3mT R3I3p-mTmrp
Выбрав в качестве желаемого характеристический полином четвертого порядка c настройкой на модульный оптимум:
D(s) = s4 + 2, 82co6s3 + 4сОб^2 + 2,82ш^ + cog , обеспечивающий перерегулирование о = 6,2 % и время переходного процесса т пп = 7ю б -1 [5], и приравняв его полиному N ( 5 ), определим коэффициенты матрицы G наблюдающего устройства:
ft =
ft =
Т4(4-2ЖУб^тУб-2Ж^^ 1
------------------------------, ft = 2,82(ofi--;
anT^y3) 6 Тэ’
Г з со £ -2,82Гэсо б -4Г 2 со ^ Q^ + 2, 82P3g)6Q^ + П2 (1 + Q2p7 ^
4«>б+2,82Г2(Об^2
ft =-----------------
(l + Q^72)/mT
-4Гэю^^ -2,82Г;юбО^ + 7^
Q2(1 + Q^P2)
где и – резонансные частоты груза и тележки; ;
и – коэффициенты матрицы динамики А (5).
Структурная схема синтезированного НУ приведена на рис. 3.
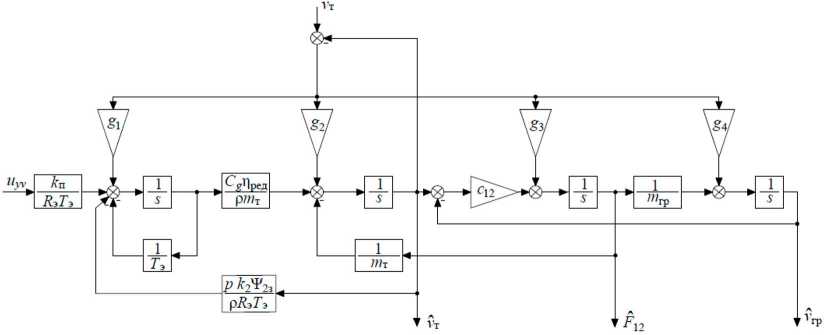
Рис. 3. Структурная схема синтезированного наблюдающего устройства
Fig. 3. Structural diagram of the synthesized observing device
Для наблюдателя значение ω б ограничивается только условиями помехозащищённости системы, поэтому для численных расчётов принимаем ω б = 100 с-1. Тогда g 1 = 3,14 ∙ 105; g 2 = –1,114; g 3 = –8,315 ∙ 105; g 4 = 224,537.
Графики изменения скорости тележки и скорости груза в системе с наблюдателем представлены на рис. 4 и рис. 5 соответственно.
Как видно из графиков, максимальная погрешность определения V^ наблюдается на начальном этапе процесса, но она никак не влияет на процесс перемещения груза в целом. Про-
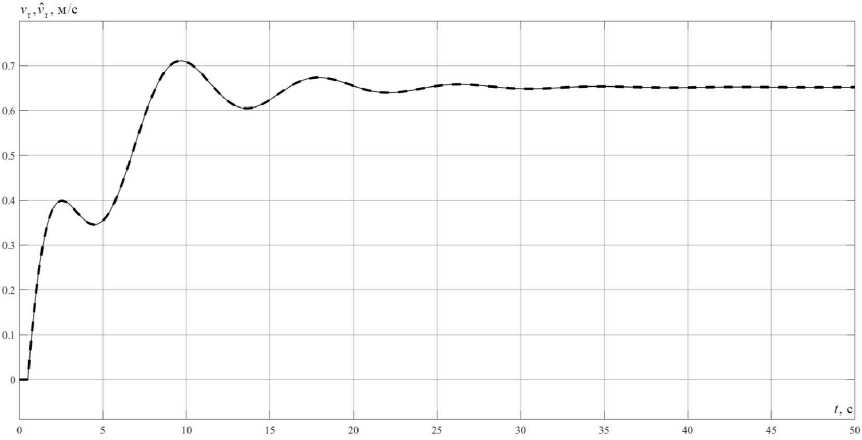
Рис. 4. Графики изменения скорости тележки (сплошная линия – скорость тележки V определяемая наблюдателем, пунктирная – реальная скорость тележки ν т )
Fig. 4. Graphs of the trolley speed change (solid line – the trolley speed VT determined by the observer, dotted line – the real trolley speed νт)
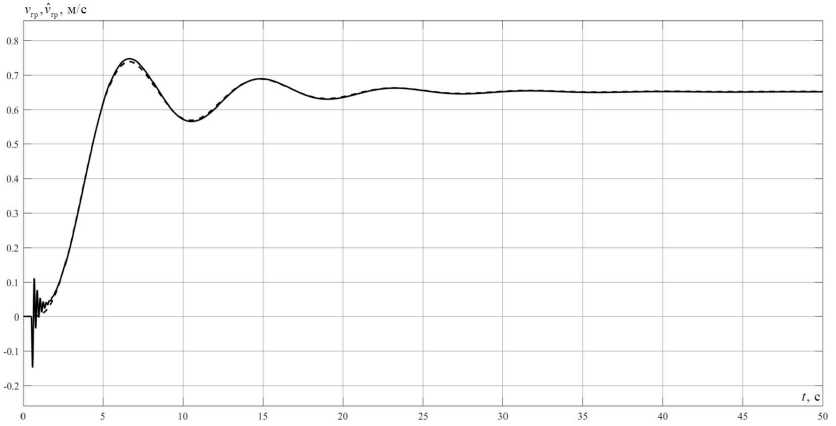
Рис. 5. Графики изменения скорости груза (сплошная линия – скорость груза V^, определяемая наблюдателем, пунктирная – реальная скорость груза νгр)
Fig. 5. Graphs of changes in speed of the load (solid line – the speed of the load V^ determined by the observer, dotted line – the real speed of the load νгр)
цессы в замкнутой системе электропривода с НУ полностью совпадают с процессами в системе, построенной в предположении, что все переменные наблюдаемы (см. рис. 2).
Таким образом, предлагаемая система модального управления асинхронным электроприводом тележки мостового крана с использованием наблюдающего устройства позволяет решить проблему подавления колебаний подвешенного груза.
Для реализации предлагаемого наблюдателя требуется четыре интегратора и несколько усилителей. Он легко реализуется как аналоговыми, так и цифровыми электронными средствами. Достоинством такого наблюдателя является то, что он позволяет полностью оценить вектор переменных состояния электропривода.
Список литературы Модальное управление асинхронным электроприводом тележки мостового крана с наблюдающим устройством
- Мещеряков В. Н. Динамика электромеханических систем подъемно-транспортных механизмов с асинхронным электроприводом, Липецк: ЛГТУ, 2002. 120.
- Коротков М. Ф., Пахомов А. Н., Федоренко А. А. Модальное управление электроприводом переменного тока. Вестник Сибирского государственного аэрокосмического университета имени академика М. Ф. Решетнева, 2011. 3(36). 70-74.
- Чертыков П. Н., Пахомов А. Н. Влияние перекрестных связей в системе асинхронного электропривода с модальным управлением. Научный форум: Технические и физико-математические науки: сб. ст. по материалам XXXVIII междунар. науч.-практ. конф., 2020, 9(38). 17-23.
- Брюханова Е. В., Пахомов А. Н. Система электропривода тележки грузоподъемного крана с модальным управлением. Научный форум: технические и физико-математические науки. сб. ст. по материалам XLIII международной научно-практической конференции. Москва, 2021. 59-64.
- Кузовков Н. Т. Модальное управление и наблюдающие устройства, М.: Машиностроение, 1976, 184.
- Пахомов А. Н. Модернизация закона управления электроприводом перемещения тележки грузоподъемного крана. Глобус: технические науки, 2020, 3(34), 31-33.
