Модальный анализ тактильного механолюминесцентного оптоволоконного покрытия при вдавливании жестких шаровых частиц

Автор: Паньков А.А., Писарев П.В., Баяндин С.Р.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 5 т.17, 2024 года.
Бесплатный доступ
Исследованы закономерности влияния величины силы вдавливания множества жестких шаровых частиц на резонансные частоты первых шести форм колебаний тактильного покрытия. Выявлен близкий к линейному характер зависимостей резонансных частот тактильного покрытия от величины силы вдавливания частиц, что эффективно для использования резонансного метода диагностирования внешних силовых воздействий
Тактильное полимерное покрытие, оптоволоконный датчик, пьезоэффект, механолюминесценция, силовое воздействие, жесткая шаровая частица, численное моделирование
Короткий адрес: https://sciup.org/146282901
IDR: 146282901 | УДК: 539.3
Modal analysis of tactile mechanoluminescent fiber optic coating at hard balls indentation
Laws of influence of force of pressing-in of multiple rigid ball particles on resonance frequencies of the first six forms of tactile coating oscillations are investigated. The relationships of resonant frequencies of tactile coating with the value of the force of indentation of particles, which is close to linear, have been revealed, which is effective for using the resonant method for diagnosing external force effects.
Текст научной статьи Модальный анализ тактильного механолюминесцентного оптоволоконного покрытия при вдавливании жестких шаровых частиц
Цитирование: Паньков А. А. Модальный анализ тактильного механолюминесцентного оптоволоконного покрытия при вдавливании жестких шаровых частиц / А. А. Паньков, П. В. Писарев, С. Р. Баяндин // Журн. Сиб. федер. ун-та. Техника и технологии, 2024, 17(5). С. 578–588. EDN: MLENOX в гибких тактильных покрытиях пьезоэлектрических полимерных поливинилденфторид-ных пленок PVDF [16–18] с уникальными физико-механическими свойствами. Идеальный тактильный датчик имеет высокую чувствительность (отношение изменения выходного сигнала к изменению диагностируемого параметра), быстрый отклик, надежность и стабильность характеристик. Фундаментальные характеристики тактильных датчиков в первую очередь определяются их активным слоем, который является наиболее важным компонентом тактильных датчиков, так как именно активный слой непосредственно воспринимает диагностируемые физические и/или механические величины из внешней среды: давление, температуру и деформацию, и преобразовывает их в различные оптические или электрические сигналы: ток, напряжение, сопротивление и емкость. Например, пьезоэлектрический активный слой [14–18] функционирует через преобразование механической энергии в электрическую, и в результате при внешнем силовом воздействии пьезоэлектрический слой генерирует электрический заряд, который прямо пропорционален величине измеряемой силы. Пьезоэлектрические элементы в составе оптоволоконного датчика, встроенного в полимерный слой, позволяют диагностировать, например, обледенение слоя и осуществлять автоматическую резонансную самоочистку поверхности слоя от корки льда [22], изучать внешний объект при контактном взаимодействии ворсинок (вибрисс) полимерного слоя с поверхностью анализируемого объекта [23].
Цель – выявление и анализ закономерностей влияния на резонансные характеристики вынужденных электромеханических колебаний представительного фрагмента (ячейки) тактильного покрытия диагностируемой величины силы P вдавливания в его сенсорную поверхность множества однотипных жестких шаровых частиц.
Вычислительная электромеханическая модель тактильного покрытия
Рассматриваемое тактильное покрытие – полимерный слой со встроенным (например, в виде спирали Архимеда) оптоволоконным пьезоэлектролюминесцентным (PEL) датчиком (рис. 1) [20] в виде световода с покрытиями из электролюминесцентного и пьезоэлектрического слоев. Электролюминесцентный и пьезоэлектрический слои структурированы в виде
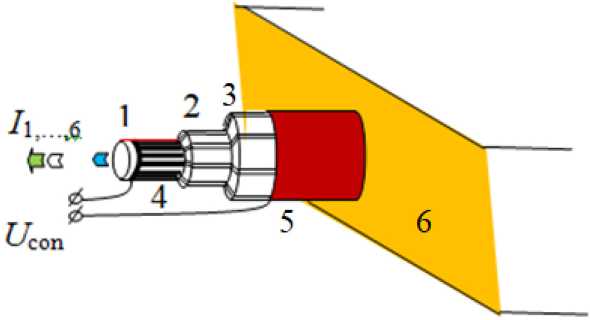
Рис. 1. Оптоволоконный PEL-датчик объемного деформированного состояния, где 1 – световод, 2, 3 – электролюминофор и пьезоэлектрик, 4, 5 – управляющие электроды, 6 –полимер
Fig. 1. Fiber optic PEL-sensor of volumetric deformed state, where 1 is a light guide, 2, 3 are EL phosphor and piezoelectric, 4, 5 are control electrodes, 6 is a polymer
a b
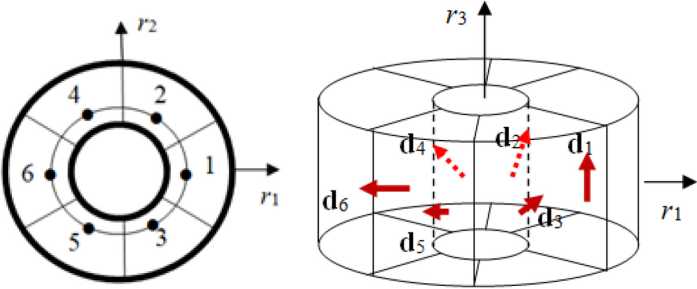
Рис. 2. Взаимное расположение пьезоэлектрических секторов (а) с различными направлениями d k пространственных поляризаций (b); (•) -точки измерения электрических потенциалов
Fig. 2. Mutual location of piezoelectric sectors (a) with different directions dk of spatial polarizations (b); (•) – electrical potential measurement points шести пар круговых составных (двухфазных) секторов «электролюминофор/пьезоэлектрик», протяженных вдоль цилиндрической поверхности световода (рис. 2). Первый светопрозрачный и второй электроды (в виде цилиндрических электродированных поверхностей) расположены на межфазной поверхности «световод/ электролюминесцентный слой» и на внешней поверхности пьезоэлектрического слоя соответственно. Электроды являются общими для всех составных секторов «электролюминофор/пьезоэлектрик» и образуют непрерывную (вдоль оси датчика) двухпроводную линию с выходами для подключения к ним управляющего электрического напряжения Ucon.
При приложении к выходам электродов переменного электрического напряжения U con возникают электромеханические колебания (вибрации) PEL-датчика с проявлением «механолю-минесцентного эффекта» – результата электрического взаимодействия пьезоэлектрического и сопряженного с ним электролюминесцентного секторов внутри каждой k -й пары «электро-люминофор/пьезоэлектрик» датчика при его деформировании в составе тактильного покрытия, k =1,…,6. В результате механолюминесцентного эффекта в электролюминесцентном секторе каждой k -й пары «электролюминофор/пьезоэлектрик» генерируются в своем частотном диапазоне fk . информативные световые импульсы; результирующие значения интенсивностей Ik для каждой частоты fk измеряются на выходе из световода.
Считаем, что пьезоэлектрические секторы (рис. 2b) различаются между собой лишь ориентациями направления поляризации – оси симметрии трансверсально-изотропных электро-упругих свойств полимерного пьезоэлектрика PVDF, d k – единичные направляющие вектора для различных секторов с координатами
d ( k )1 =cosϕ k sinθ k , d ( k )2 =sinϕ k sinθ k , d ( k )3 =cosθ k , (1)
где ϕ, θ – углы сферической системы координат: ϕ k= π( k -1)/3, θ1=0, θ2=π/3, θ3= –π/3, θ4=2π/3, θ5= –2π/3, θ6=π, координатная ось z = r 3. Компоненты трансверсально-изотропных тензоров упругих свойств C k , пьезомеханических коэффициентов e k , диэлектрических проницаемостей λ k для k -го пьезоэлемента датчика с единичным направляющим вектором d k (1) поляризации в координатных осях ri представим разложениями [25]: 1) для упругих свойств в виде
^ ” ^ c(p)T(p)
P=1
через компоненты базисных тензоров
T^inkl — ^in^kl> T^inkl ^in^kdir ^(s^mkl — ^kl^idn/
^(4)inkl didndkdi,T^}inkl — aikOnl + ^il^nk>
^^inki ^ik^ndi “Ь aiid-ndk 4- ct^d^di + cinididk, и пять независимых констант упругости: C(l) — C12< C(2) — C(3) — C13< C(4) — C33< C(5) — C66’ C(6) — C55< выполняются равенства
Qi ^(i) + 2C(5), dij S[j didj, символ Кронекера δ;
-
2) для пьезомеханических свойств
eimn ^3i^i^mn "•" (^зз ^3i 2ei^didmdn+ei5(dm6in + dnd[m), где e33, e31, e15 – независимые константы;
-
3) для диэлектрических свойств
^■in ^-l^in + (^3 h^)djdn c использованием независимых компонент: c12, c13, c33, c66, c55, e33, e31, e15, λ1, λ3 трансверсальноизотропных тензоров упругих C, пьезоэлектрических e и диэлектрических λ свойств в главных осях ξi в матричной форме записи пьезоэлемента PVDF с поляризацией по оси ξ3 соответственно.
При электромеханическом нагружении и, как следствие, вибрациях PEL-датчика в составе тактильного покрытия имеем результирующие величины электрических напряжений
U ( k )lum = a con( k ) U con + b ( k ) ij ε ij (2)
на электролюминесцентном элементе k -го сектора датчика, где управляющие a con ( k ) и информационные b ( k ) передаточные коэффициенты датчика могут быть найдены экспериментально или с использованием современных численных методов. Формула (2) представляет величину электрического напряжения U ( k )lum в виде линейного разложения по значениям компонент ε ij тензора «макродеформации» ε (обусловленной вынужденными колебаниями тактильного покрытия и действием внешнего силового воздействия, т.е. вдавливания жестких частиц) датчика и управляющим электрическим напряжением U con, приложенным к выходам электродов датчика.
Модальный анализ тактильного покрытия
Модальный анализ – нахождение собственных форм и резонансных частот колебаний тактильного покрытия при действии на него внешних силовых воздействий осуществлен в результате численного конечно-элементного решения стационарной задачи электроупругости в пакете ANSYS для составной ячейки периодичности с одиночной шаровой частицей – 582 –
(рис. 3) в Центре высокопроизводительных вычислительных систем ПНИПУ. Расчетная область – прямоугольный параллелепипед «полимерный слой/встроенный датчик/шаровая частица» (рис. 3) с условиями симметрии для электроупругих полей на его боковых гранях, основание – нижняя грань ячейки периодичности считалась неподвижной.
Геометрические параметры расчетной области (ячейки периодичности на рис. 3) были заданы через размеры ячейки периодичности: l = 30 мм, b =12 мм, h = 3.5 мм – длина, ширина и толщина параллелепипеда в виде слоя с ребрами по координатным осям ri . При этом ось r 3 проходит по центру составной ячейки (слоя) и является продольной осью встроенного в слой оптоволоконного PEL-датчика при значении радиусов световода r ( 1 ) =1мм и радиусов r ( 2 ) =1.2мм, r ( 3 ) =1.4мм межфазных границ «световод/электролюминофор» и «электролюминофор/пьезо-электрик» соответственно. При численном моделировании область ячейки периодичности (рис. 3) разбивалась на 18‧106 конечных элементов, включая 12‧106 для области PEL-датчика, шаровая частица абсолютно жесткая. При численном решении системы линейных алгебраических уравнений использован итерационный решатель метода сопряженных градиентов, что позволило значительно сократить (с 18 до 7,5 часов) время счета в сравнении с использованием прямого решателя SPARSE.
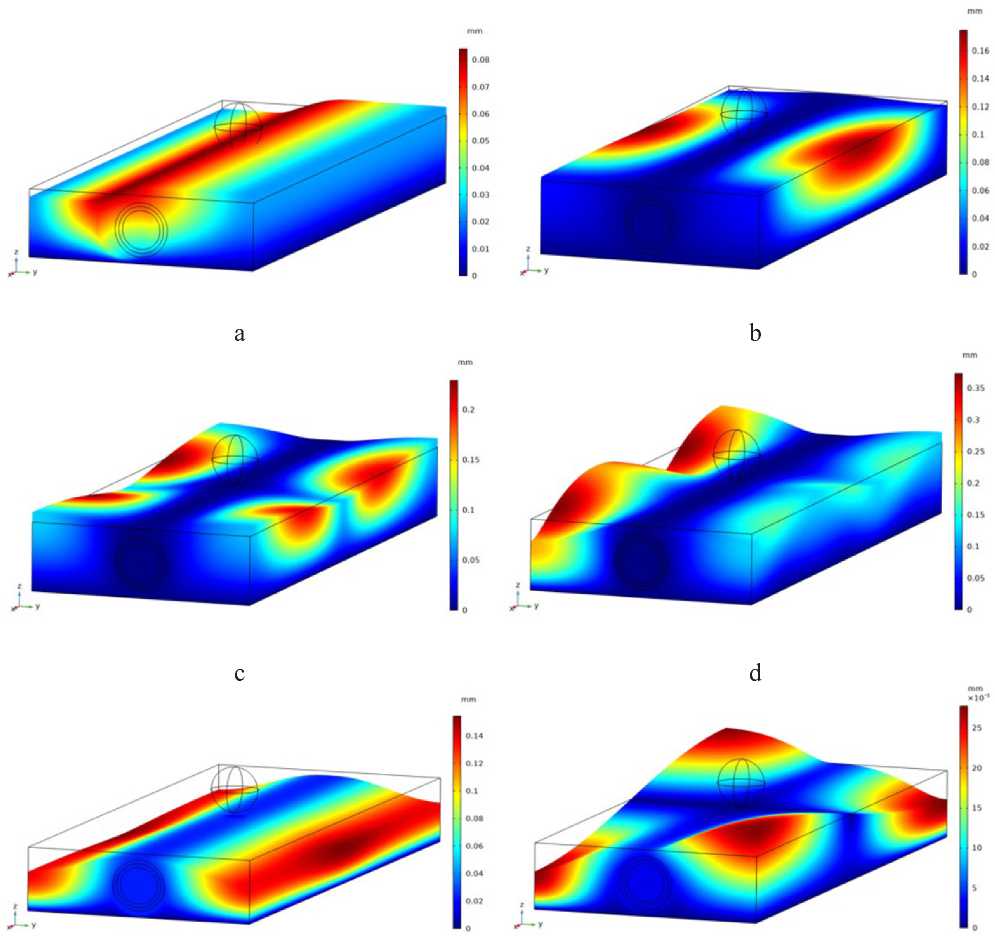
В результате модального анализа представительной области в виде ячейки периодичности (рис. 3) найдены первые шесть собственных форм (рис. 4) и резонансных частот νrez ( n ) (рис. 5) колебаний тактильного покрытия для рассматриваемого случая (рис. 3) вдавливания множества жестких шаровых частиц. Установлены закономерности влияния значений силы P вдавливания на каждую из резонансных частот νrez ( n ) колебаний (рис. 5) ячейки периодичности (рис. 3) индикаторного полимерного PEL-покрытия, здесь n =1,…,6. Выявлено (рис. 5), что при значениях силы P более 0.01Н значение коэффициента k ν =Δνrez ( n ) /Δ P ≈ –1236 Гц/Н практически постоянно для всех шести первых собственных частот ν rez( n ) в виде линейного представления
ν rez( n ) = ν 0( n ) + k ν P . (3)
Установленные зависимости (рис. 5) резонансных частот ν rez( n ) ячейки периодичности (рис. 3) и их линейные аппроксимации (3) позволяют использовать алгоритм резонансного
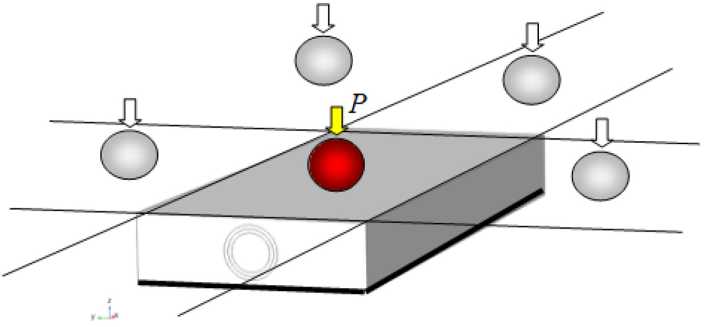
Рис. 3. Ячейка периодичности многоточечного силового воздействия
Fig. 3. Multipoint force frequency cell
e f
Рис. 4. Собственные формы колебаний ячейки вдавливания P =0.1 Н жесткой шаровой частицы
периодичности тактильного покрытия при силе
Fig. 4. Natural vibrations of tactile coating periodicity cell at indentation force P = 0.1 N of rigid ball particle
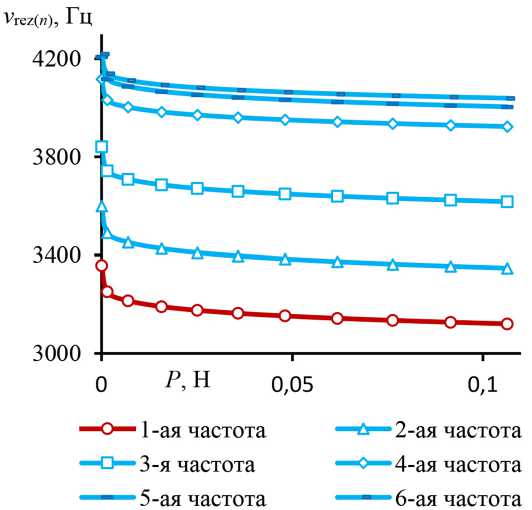
Рис. 5. Влияние силы P вдавливания частиц на собственные частоты νrez ( n ) колебаний тактильного покрытия
-
Fig. 5. Influence of particle indentation force P on natural frequencies νrez ( n ) of tactile coating oscillations
t/lum(fc), В Mum®, В
—о—3-ий сектор —о—4-ый сектор 1-ый сектор 2-ой сектор
_ „ —о—З-ий сектор —5—4-ый сектор
— 5-ыи сектор —6-ои сектор „
5-ыи сектор б-ои сектор a b
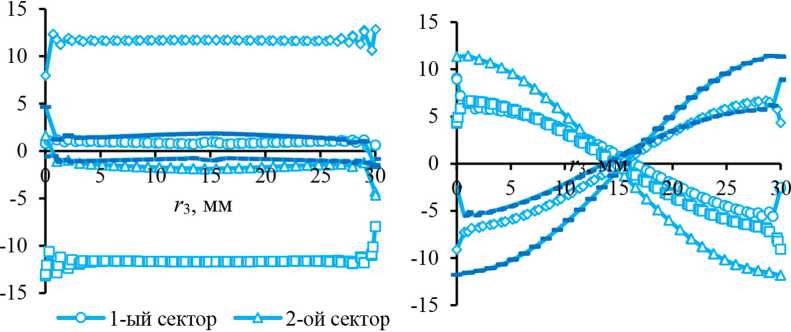
Рис. 6. Распределения электрических напряжений U lum( k ) вдоль k -го сектора электролюминофора для первой (а) и второй (b) форм колебаний покрытия при силе вдавливания P =0.1 Н частиц
-
Fig. 6. Distribution of voltages U lum( k ) along the k -th sector of the electrophosphor for the first (a) and second (b) forms of coating vibrations at the indentation force P = 0.1 N of particles
диагностирования [21] и находить величину внешнего силового воздействия P по измеренным информативным изменениям резонансной частоты колебаний индикаторного полимерного PEL-покрытия. На практике по форме оптических сигналов, обусловленной зависимостью величин электрических напряжений U ( k )lum на слоях секторов электролюминофора, можно сделать вывод о номере n реализованной резонансной частоты. На рис. 6 изображены графики распределений электрических напряжений U lum ( k ) вдоль секторов электролюминофора («измеренных» в контрольных k -х точках секторов на рис. 2а) для первой (рис. 5, рис. 6а) и второй (рис. 5, рис. 6b) форм колебаний представительного фрагмента (рис. 3) покрытия при силе вдавливания P =0.1 Н частиц. Характер распределений величин U lum ( k ) по продольной координате r3 секторов электролюминофоров датчика обуславливает форму k -х световых импульсов на выходе из световода, что дает возможность идентификации реализующейся на практике резонансной формы колебаний.
Выводы
Представлена вычислительная электромеханическая модель тактильного механолю-минесцентного оптоволоконного покрытия (рис. 1) резонансного метода диагностирования внешних силовых воздействий для случая вдавливания в его внешнюю сенсорную поверхность множества однотипных и периодическим образом распределенных по поверхности жестких шаровых частиц (рис. 3). Сенсорные характеристики тактильного покрытия обуславливаются встроенным в него оптоволоконным пьезоэлектролюминесцентным датчиком (рис. 1, рис. 2), в котором механолюминесцентный эффект – это результат электрического взаимодействия деформируемого пьезоэлектрического слоя на смежный с ним электролюминесцентный слой датчика. В режиме диагностирования при контактном взаимодействии – 585 – сенсорной поверхности покрытия с жесткими шаровыми частицами вынужденные электромеханические колебания (рис. 4) тактильного покрытия (рис. 3) инициируются переменным управляющим электрическим напряжением Ucon, приложенным к выходам электродов датчика (рис. 1). Необходимые для резонансного метода динамические характеристики: собственные формы и зависимости резонансных частот тактильного покрытия от величины диагностируемого параметра – силы P вдавливания частиц (рис. 3) определены на основе численного конечно-элементного решения стационарной задачи электроупругости в пакете ANSYS для составной ячейки периодичности с одиночной шаровой частицей (рис. 3). Расчетная область – прямоугольный параллелепипед «полимерный слой/встроенный датчик/ шаровая частица» (рис. 3) с условиями симметрии для электроупругих полей на его боковых гранях, нижняя грань (основание) ячейки периодичности неподвижна. В результате модального анализа ячейки периодичности найдены собственные формы и резонансные частоты νrez(n) колебаний тактильного покрытия для рассматриваемого случая (рис. 3) вдавливания множества жестких шаровых частиц. Исследованы (рис. 5) закономерности влияния величины силы P вдавливания частиц на резонансные частоты νrez(n) первых шести форм колебаний (рис. 4) тактильного покрытия. Выявлен (рис. 5) близкий к линейному характер, и найдено численное значение коэффициента kν пропорциональности (3) зависимостей резонансных частот νrez(n) тактильного покрытия от величины силы P вдавливания частиц при значениях силы более 0.01Н, что эффективно при использовании резонансного метода для диагностирования рассматриваемых силовых воздействий.
Список литературы Модальный анализ тактильного механолюминесцентного оптоволоконного покрытия при вдавливании жестких шаровых частиц
- Wang X., Sun F., Yin G., et al. Tactile-sensing based on flexible PVDF nanofibers via electrospinning: a review. Sensors. 2018. 18(2). 1–16. https://doi.org/10.3390/s18020330
- Lu K., Huang W., Guo J., et al. Ultra-sensitive strain sensor based on flexible poly(vinylidene fluoride) piezoelectric film. Nanoscale Research Letters. 2018. 13(83). 1–6. https://doi.org/10.1186/s11671–018–2492–7
- Koiva R., Zenker M., Schurmann C., et al. A highly sensitive 3D‑shaped tactile sensor. Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Wollongong, Australia. 9–12 July 2013. 1084–1089.
- Lee HK., Chung J., Chang SI., et al. Normal and shear force measurement using a flexible polymer tactile sensor with embedded multiple capacitors. IEEE Journal of Micro-electromechanical Systems. 2008. 17(4). 934–942. https://doi.org/10.1109/JMEMS.2008.921727
- Liang G., Wang Y., Mei D., et al. Flexible capacitive tactile sensor array with truncated pyramids as dielectric layer for Three-Axis force measurement. IEEE Journal of Micro-electromechanical Systems. 2015. 24(5). 1510–1519. https://doi.org/10.1109/JMEMS.2015.2418095
- Iwasaki T., Takeshita T., Arinaga Y., et al. Shearing force measurement device with a built-in integrated micro displacement sensor. Sensors and Actuators A: Physical. 2015. 221. 1–8. https://doi.org/10.1016/j.sna.2014.09.029
- Lee HK., Chang SI., Yoon E. A flexible polymer tactile sensor: Fabrication and modular expandability for large area deployment. IEEE Journal of Micro-electromechanical Systems. 2006. 15(6). 1681–1686. https://doi.org/10.1109/JMEMS.2006.886021
- Yousef H., Boukallel M., Althoefer K. Tactile sensing for dexterous in-hand manipulation in robotics – A review. Sensors and Actuators A: Physical. 2011. 167. 171–187. https://doi.org/10.1016/j.sna.2011.02.038
- Kappassov Z., Corrales JA., Perdereau V. Tactile sensing in dexterous robot hands – Review. Robotics and Autonomous Systems. 2015. 74. 195–220. https://doi.org/10.1016/j.robot.2015.07.015
- Oddo CM., Beccai L., Felder M., et al. Artificial roughness encoding with a bio-inspired MEMS‑based tactile sensor array. Sensors. 2009. 9(5). 3161–3183. https://doi.org/10.3390/s90503161
- Kolesar Jr ES, Dyson CS. Object imaging with a piezoelectric robotic tactile sensor. IEEE Journal of Micro-electromechanical Systems. 1995. 4(2). 87–96. https://doi.org/10.1109/NAECON.1993.290890
- Drimus A., Petersen MB., Bilberg A. Object texture recognition by dynamic tactile sensing using active exploration. Proceedings of the 21st IEEE International Symposium on Robot and Human Interactive Communication. Paris, France. 9–13 September 2012. 277–283.
- Zhang T., Liu H., Jiang L., et al. Development of a flexible 3-D tactile sensor system for anthropomorphic artificial hand. IEEE Sensors Journal. 2013. 13. 510–518. https://doi.org/10.1109/JSEN.2012.2220345
- Ramadan K., Sameoto D., Evoy S. A review of piezoelectric polymers as functional materials for electromechanical transducers. Smart Materials and Structures. 2014. 23(3). 033001. https://doi.org/10.1088/0964–1726/23/3/033001
- Seminara L., Pinna L., Valle M., et al. Piezoelectric polymer transducer arrays for flexible tactile sensors. IEEE Sensors Journal. 2013. 13(10). 4022–4029. https://doi.org/10.1109/JSEN.2013.2268690
- Hamdi O., Mighri F., Rodrigue D. Piezoelectric cellular polymer films: Fabrication, properties and applications (Review). AIMS Materials Science. 2018. 5(5). 845–869. https://doi.org/10.3934/matersci.2018.5.845
- Aleksandrova M. Spray deposition of piezoelectric polymer on plastic substrate for vibrational harvesting and force sensing applications. AIMS Materials Science. 2018. 5(6). 1214–1222. https://doi.org/10.3934/matersci.2018.6.1214
- Rajala S., Tuukkanen S., Halttunen J. Characteristics of piezoelectric polymer film sensors with solution-processable graphene-based electrode materials. IEEE Sensors Journal. 2015. 15(6). 3102–3109. https://doi.org/10.1109/JSEN.2014.2344132
- Jia Y., Tian X., Wu Z., et al. Novel mechano-luminescent sensors based on piezoelectric/electroluminescent composites. Sensors. 2011. 11(4). 1–9. https://doi.org/10.3390/s110403962
- Патент RU № 2643692. Волоконно-оптический датчик объемного напряженного состояния / Паньков А. А., опубл.: 05.02.2018, Бюл. № 4; заявка № 2017111405 от 04.04.2017 г. [Pan’kov AA. Fiber optic volumetric stress sensor. Patent RU № 2643692 of April 4, 2017 (in Rus.)]
- Pan’kov A. A. Piezoelectroluminescent fiber-optic sensors for temperature and deformation fields. Sensors and Actuators A: Physical. 2019. 288. 171–176. https://doi.org/10.1016/j.sna.2019.01.030
- Патент RU № 2748665. Способ удаления обледенения на аэродинамических поверхностях / Паньков А. А., опубл.: 28.05.2021 Бюл. № 16, заявка № 2020132202 от 28.09.2020 г. [Pan’kov A. A. Method of de-icing aerodynamic surfaces. Patent RU № 2748665 of May 28. 2021 (in Rus.)]
- Паньков А. А., Писарев П. В., Баяндин С. Р. Электро-механическая модель тактильного полимерного оптоволоконного пьезоэлектролюминесцентного покрытия. Журнал радио электроники [электронный журнал], 2022, 8, 1–13, https://doi.org/10.30898/1684–1719.2022.8.3 [Pan’kov A.A., Pisarev P. V., Bayandin S. R. Electro-mechanical model of tactile polymer fiber optic piezo-electroluminescent coating. Zhurnal radioelektroniki [Journal of Radio Electronics] [online], 2022, 8, 1–13 (in Rus.)]
- Крауя У. Э., Янсонс Я. Л. Механолюминесценция композитных материалов: Методы, аппаратура и результаты исследований. Рига: Зинатне, 1990. 152 [Krauya UE., YAnsons YL. Mechanoluminescence of composite materials: Methods, equipment and results of researches. Riga: Zinatne Publisher, 1990. 152 (in Rus.)]
- Победря Б. Е. Механика композиционных материалов. М.: Изд–во Моск. университета, 1984. 336 [Pobedrya B. E. Mechanics of composite materials. Moscow: Moscow University Publisher, 1984. 336 (in Rus.)]
