Модель бесконтактного транспортного средства как системы с особой точкой

Автор: Богословский С.В.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Оригинальные статьи
Статья в выпуске: 2 т.13, 2003 года.
Бесплатный доступ
Известные модели бесконтактных транспортных средств обычно описываются уравнениями невысокого порядка. Это обусловлено наличием непреодолимых проблем с получением аналитического решения для нелинейных уравнений выше второго порядка. В реальных системах обобщенная координата может зависеть от многих переменных величин, каждая из которых описывается своим многомерным дифференциальным уравнением. В этих случаях линеаризация является единственным методом перехода от исходной нелинейной модели к интегрируемой модели. В данной статье применен один из известных методов линеаризации нелинейных моделей - замена аргумента нелинейной функции на известную функцию времени с последующим определением коэффициентов линеаризации. В работе предлагается модель бесконтактного транспортного средства, в которой нелинейность силового воздействия аппроксимируется переменным коэффициентом гиперболического типа. Модель нелинейности зависит от времени и от скорости перемещения ротора как от параметра. Модель бесконтактного подвеса может быть классифицирована как модель линейной нестационарной системы управления с особой точкой. Модель может быть использована для анализа и синтеза систем управления гироскопами и бесконтактными транспортными средствами.
Короткий адрес: https://sciup.org/14264290
IDR: 14264290 | УДК: 621.317.79:
Model of a contactless vehicle as a system with a singularity
The known models of contactless vehicles are usually described by low order equations. This is caused by insuperable problems in obtaining analytical solutions for the nonlinear equations of higher than second order. In real contactless suspension systems the generalized coordinate may depend on many variables, each of which is described by a multivariate differential equation. In this case the only way to go from the initial nonlinear model to an integrable one is linearization. One of the known methods of linearization of nonlinear models is the substitution of the argument of a nonlinear function by a known function of time with subsequent definition of linearization factors. Such method is applied, for example, for harmonic linearization of nonlinear functions. A similar approach is used in the present article. The article offers a model of a contactless vehicle in which the nonlinearity of power action is approximated by a variable factor of hyperbolic type. The model of nonlinearity depends on time and on the rotor speed as a parameter. The model of a contactless suspension may be treated as a model of a linear nonstationary control system with a singularity. The model can be used for the analysis and synthesis of control systems of gyroscopes and contactless vehicles.
Текст научной статьи Модель бесконтактного транспортного средства как системы с особой точкой
Системы бесконтактного подвешивания динамических объектов находят все большее применение в современных высокотехнологичных продуктах производства — от микромеханических гироскопов до высокоскоростных транспортных средств (ТС). Математические модели таких систем являются нелинейными, что затрудняет применение аналитических методов для решения задач анализа и синтеза при разработке новых конструктивных решений.
ПОСТАНОВКА ЗАДАЧИ
Функционально-структурные схемы электромагнитного и электростатического бесконтактных подвесов представлены на рис. 1. На нем обозначены: ЭМ — электромагнит; I — электрический ток; ВТ – взвешенное тело; U 1 и U 2 — электрические потенциалы, подаваемые на пластину П конденсатора и на ВТ соответственно; A U — разность потенциалов; ( x 0 - x ) — зазор между ЭМ (П) и ВТ.
В работе рассматривается возможный метод приведения нелинейной математической модели бесконтактного подвеса к интегрируемому виду линейной нестационарной модели с особой точкой.
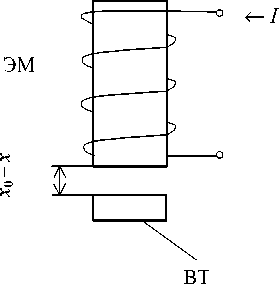
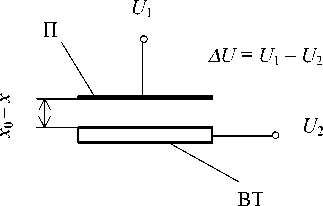
Рис. 1. Схемы бесконтактных подвесов: а — электромагнитный подвес; б — электростатический подвес. Пояснения в тексте
РЕШЕНИЕ ЗАДАЧИ
Известно, что для одностепенных электромагнитных и электростатических бесконтактных подвесов транспортных средств сила взаимодействия взвешенного тела (ротора) и статора определяется соотношениями [1]
Для построения модели, которая поддается аналитическому решению, линеаризуем входящее в формулу (3) обобщенное управляющее воздействие q в окрестности его равновесного значения q 0
q 2 ≈ q 0 2 + kq ⋅ q , (4)
µ ⋅ µ 0 w 2 S m I 2 8( x 0 - x )2 2 ε ⋅ ε 0 Sc ∆ U 2
( x 0 - x )2 ,
а степенную функцию f 1 ( x ) аппроксимируем дробно-линейной функцией
f 2 =
1. x 0( x 0 - kx ⋅ x )
где µ , µ 0 — относительная и абсолютная магнитные проницаемости соответственно; ε , ε 0 — относительная и абсолютная диэлектрические проницаемости соответственно; Sm , Sc — площадь полюса электромагнита и эквивалентной обкладки конденсатора соответственно; I — сила тока в обмотке электромагнита; ∆ U — разность потенциалов на взвешенном теле и на статоре; x - x 0 — величина зазора между взвешенным телом и электромагнитом (обкладкой конденсатора); x — координата взвешенного тела в текущий момент времени; x 0 — номинальная величина зазора.
Обобщая формулы (1) и (2), представим зависимость силы бесконтактного (электромагнитного или электростатического) взаимодействия взвешенного тела с силовым полем в виде
F = a ⋅ q 2 2 = a ⋅ f 1 ( x ) ⋅ q 2, (3)
( x 0 - x )2
где a — постоянный коэффициент, зависящий от конструкции бесконтактного подвеса;
f 1 ( x ) = 2 ; q — обобщенное управляющее
( x 0 - x )2
воздействие (сила тока или разность потенциалов).
Для эффективного исследования систем управления необходимо получить аналитическое решение для системы уравнений, включающих нелинейную зависимость (3) силы F от координат x и q . В реальных системах бесконтактного подвеса обобщенная координата может зависеть от многих переменных величин, каждая из которых описывается своим многомерным дифференциальным уравнением. В этих случаях единственным методом сведения исходной нелинейной модели к интегрируемому виду является линеаризация. Одним из известных методов линеаризации нелинейных моделей является замена аргумента нелинейной функции известной функцией времени и последующее определение коэффициентов линеаризации. Такой метод применяется, например, при гармонической линеаризации нелинейных зависимостей.
Коэффициенты линеаризации kq и kx подлежат определению после нахождения аналитического решения. Начальные значения коэффициентов линеаризации могут быть определены на этапе предварительной аппроксимации нелинейностей.
В качестве первого приближения к значению коэффициента kq можно принять коэффициент разложения нелинейности q2 в ряд Тейлора в окрестности равновесного значения kq = 2 ⋅ q0 .
В качестве первого приближения к значению коэффициента kx можно принять значение kx=1.38, обеспечивающее удовлетворительную аппроксимацию нелинейной функции f1 на интервале возможных значений аргумента (рис. 2).
Графики степенной функций f 1 и дробнолинейной функции f 2 при kx = 1.38 приведены на рис. 2, где аппроксимируемая функция f 1 представлена пунктирной линией, а аппроксимирующая функция f 2 — сплошной линией.
Из рис. 2 следует, что аппроксимирующая дробно-линейная функция f 2 на большей части области возможных значений аргумента отличается от аппроксимируемой степенной функции f 1 не более чем на 20 %.
Предельные значения коэффициента kx , входящего в функцию f 2 , могут быть определены с одной стороны как значение производной от знаменателя функции f 1 в начальной точке
k
x max
d 2
- ( x 0 - x )
dx x=0
= 2 ⋅ x 0,
а с другой стороны — как коэффициент, определяющий угол наклона прямой, соединяющей точки
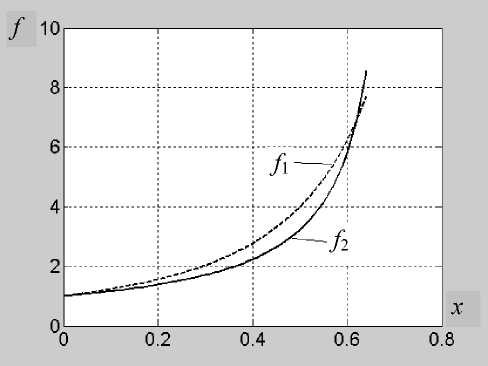
Рис. 2. Дробно-линейная аппроксимация степенной функции
параметра kF 0 , kF 1 и t 0 , зависящих от трех неопределенных коэффициентов q 0, ( kx ■ v ) и kq. Конкретные типы моделей такого вида используются при моделировании переходных процессов в акселерометрах и гироскопах с магнитным [1] и электростатическим подвесами [2], в двигателях для высокоскоростных транспортных средств на магнитной подвеске.
В общем случае линеаризованная модель бесконтактного подвеса транспортного средства с учетом нестационарности силового поля и (8) может быть представлена в виде [1]:
^^1 = x 2 + f i ,
,x 2 = а 21 x i + а 22 x 2 + а 23 - — + f 2 , (9)
t - t 0
x3 = a 31 x 1 + a 32 x 2 + а 33 x 3 + f 3 ,
максимума и минимума функции ( x 0 - x)2
на интервале [0, х 0 ]
k x min
= x о .
С учетом аппроксимаций (4) и (5) модель преобразуется к виду
F =
a x о( x о - kx • x)
• ( q 2 + k q • q ).
Модель (6) содержит произведение линейной функции от q на величину, обратно пропорциональную (x0 –kxx). При линеаризации нелинейной модели (6) предположим, что координата х линейно зависит от времени x = V • t, (7)
где f 1 , f 2 , f 3 — возмущающие воздействия, в том числе зависящие от начальных условий; x 1, x 2, x 3 — координаты вектора состояния системы, приведенные к нулевым начальным условиям; x 1 — координата линейного смещения взвешенного тела; x 2 = x 1 — скорость линейного смещения; x 3 = q = I — отклонение от равновесного значения силы тока в электромагнитной катушке.
Третье уравнение системы (9) составлено в предположении, что управляющее воздействие является взвешенной суммой всех трех обобщенных координат.
Структурная схема нестационарной модели бесконтактного ТС приведена на рис. 3.
где v — параметр, подлежащий определению из условия оптимальной аппроксимации переходных процессов.
С учетом аппроксимации (7) модель (6) приобретает вид, допускающий получение интегрального представления решения задачи Коши
a • ( q о 2 + k q q )
F =-- x0(kx • v • t - x0)
k + k F 1^^ , ( t - t 0 ) ( t - t 0 )
, a • q a • kq где kF 0 = - --------; kF! = —--------; t 0 = kx • v • x0 kx • v • x0
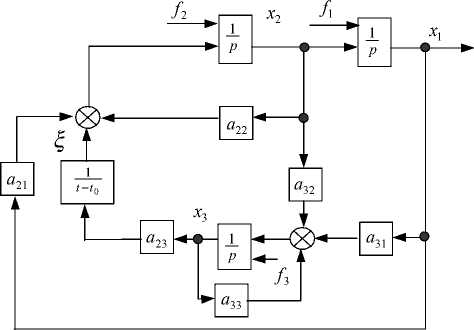
Рис. 3. Структурная схема нестационарной модели бесконтактного транспортного средства
x 0
.
kT • v
x
Модель (8) позволяет учесть нестационарность силового поля и включает три неопределенных
В такой постановке для решения системы уравнений (9) может быть использован метод, аналогичный методу решения обыкновенного дифференциального уравнения Лапласа с особой точкой [3].
Преобразуем второе уравнение, умножив его на т = t - t 0 и заменив координату х 2 в соответствии с первым уравнением системы (9):
X = X 2 + f„ т • (Xi - a21Xi - a22 .Vi) = a 23Xз + т • (f2 - a 22 f1), (10)
X 3 = a 31 X 1 + a 32 X i + a 33 X 3 + f 3 - a 32 f 1 .
Предположим, что требуется найти решение систем уравнений (9) и (10) при нулевых начальных условиях, т. е. эти системы уравнений составлены в отклонениях от равновесного положения. Тогда решение системы уравнений (10) будем искать в виде интеграла обращения Римана—Мел-лина—Бромвича
1 c + i ^
X(t) = — JeptX(p)dp , 2ni J c - i^
где X ( p ) = [ x 1 ( p ),..., x n ( p )]T — преобразование Лапласа вектор-функции X ( t ) = [ x 1 ( t ),..., x n ( t )]T состояния системы (10).
Относительно изображений получаем систему нестационарных алгебраических уравнений с двумя независимыми переменными т и р
Т • [ p 2 - a 21 - p • a 22 ] X 1 ( p ) =
= a 23 X 3 ( p ) + T • [ f 2 ( p ) - a 22 f I ( p )]; pX 3 ( p ) = [ a 31 + p • a 32 ] X 1 ( p ) +
+ a 33 X 3 ( p ) + f 3 ( p ) - a 32 f 1 ( p ).
Интегрированием по частям можно показать, что имеет место соотношение
1 c + i ^ 1 c + i ^ j
— f t • e p f ( p )d p = - — J ep‘—f ( p )d p ,
2ni J 2m J dp c - i^ c - i^
откуда следует:
c + i ^
2^4" J epf ( p )d p = c - i ^
1 c + i ^ 1 c + i ^
= — f t • e p f ( p )d p - 1 0 • — eeptf ( p )d p =
2ni J 2ni J c - i ^ c - i^
. c+i^\
= - — J e pt — + 1 0 f ( p )d p .
2m Jd c - i ^ \/
Следовательно, дифференциальное уравнение относительно координаты X 1 может быть представлено в виде
Г d
+ t 0
( d p
• [ p p
- a 21 - p • a 22 ] X 1 ( p ) =
= a 23 X 3 ( p ) + T • [ f 2 ( p ) - a 22 f 1 ( p )],
( p • a 32 + a 3,)
X 3(p) =--------------X1 (p) + p - a 33
+ 1----[ f 3 ( p ) - a 32 f 1 ( p )].
p - a 33
Приводя это уравнение к нормальной форме Коши, получим d / X
—X 1 ( p ) = d p
- t 0
a 23 • ( p • a 32 + a 31 ) + (2 p - a 22 )( p - a 33 ) ( p - a 33 ) • ( p 2 - a 21 - p • a 22 )
X 1 ( p ) -
a 23 [ f 3 ( p ) - a 32 f 1 ( p )] + т • [ f 2 ( p ) - a 22 f 1 ( p )]( p - a 33 ) ( p - a 33 ) • ( p 2 - a 21 - p • a 22 )
Представим это уравнение в более компактной форме d / 4
—X1(p) = dp
•
= - [ 1 0 + ф 1 ( p ) + Q T p )] • X 1 ( p ) - F^ ( p ), (11)
Q ( p ) 1
_ , , a 23 • ( p • a 32 + a 31)
где Ф 1 ( p ) =------ 23 32 ---312----- — пе-
( p - a 33 ) • ( p - a 21 - p • a 22 )
редаточная функция стационарной части системы от выхода нестационарного звена с координатой ^ до входа этого звена; Q(p) = (p2 - a21 - p • a22) — характеристический полином подсистемы с коор- динатами x1, x2 с исключенной нестационарной обратной связью;
F ( Р ) =
= a 23 [ f 3 ( Р ) - a 32 f l ( Р )] +
-
( Р - a 33 ) • ( Р 2 - a 21 - Р • a 22 )
+ + Т • [ f 2 ( Р ) - a 22 f l ( Р )]( Р - a 33 ) _
-
( Р - a 33 ) • ( Р 2 - a 21 - Р • a 22 )
взвешенная сумма внешних воздействий, приведенная к входу нестационарного звена.
Общим решением соответствующего (11) однородного дифференциального уравнения
Оригиналом изображения (13) будет интеграл обращения Римана—Меллина—Бромвича
-
x 1 ( t ) =
-
1 Г С +
= -- X f
2га J
V
p
c - i ^
ep ( t - t 0 ) ф ( p )—1- X Q ( Р )
X J e zt 0 Ф 1 ( z ) • ф - ( z ) Q ( z ) F ( z)dz d Р .
ОО
/
-d x ( p ) = - d p
* о +Ф 1 ( Р ) +
S C p ) Q ( Р )
будет экспоненциальная функция
-J[ * о+Ф1( -)+Ц ] dz x 10 ( Р) = e Р 0
= eР - Р о )* о ф ( p ) Q^ l, Q ( Р )
• x 1 ( Р )
-J Ф1( z )dz где ф(p) = e Р0 — решение дифференциаль
ного уравнения — ф(p ) = -Ф 1 ( p ) • ф (p ). d p
Общее решение неоднородного обыкновенного линейного дифференциального уравнения первого порядка (11) с переменным коэффициентом равно сумме реакций системы на начальное условие и на возмущение, так что при нулевом начальном условии общее решение совпадает с частным решением — с реакцией системы на возмущение и имеет вид [2]:
Интегральное представление вида (14) неудобно для практического использования, поскольку изображение внешнего воздействия F S 1 ( z ) входит под знак внутреннего интеграла, что затрудняет выделение сомножителя, аналогичного параметрической передаточной функции линейных нестационарных систем общего вида [4]. Поэтому проинтегрируем (14) по частям, учитывая, что при нижнем и верхнем пределах внешнего интегрирования подынтегральные функции обращаются в нуль, т. к. модуль экспоненциальных множителей при чисто мнимом аргументе равен единице, а все передаточные функции, входящие под знак интегрирования, стремятся к нулю при увеличении модуля аргумента и, кроме того, предполагается, что подынтегральная функция во внутреннем интеграле стремится к нулю не медленнее, чем 1 p 2 . При интегрировании по частям обозначим
d U = ep ( t - t 0 ) ф ( p )-1-d p , Q ( Р )
V = J ezt 0 Ф 1 ( z ) • ф -* ( z ) Q ( z ) F^x( z )d z ,
^
тогда
x 1 ( Р ) =
p
U = J ez ( t - t 0 )
^
----ф ( z )d z Q ( z )
- e" pt 0 ф ( p )—1- J ezt 0 ф "1( z ) Q ( z ) F ^ ( z )d z . (13) Q ( p ) Р 0 '
d V = ep* 0 ф 1 ( p ) • ф -1 ( p ) Q ( p ) F ^ 1 ( p )d p .
Пределы интегрирования должны быть выбраны таким образом, чтобы при p ^ ^ решение неоднородного уравнения (11) стремилось к нулю, т. к. при постановке задачи предполагалось, что система (9) удовлетворяет нулевым начальным условиям, в частности, должно выполняться условие
В соответствии с общей формулой интегрирования по частям при условии, что
U ( Р ) • V ( Р )| Р =+ ’ “ = 0 , получим
lim px 1 ( p ) = 0 .
Р ^^
Следовательно, в формуле (13) необходимо положить p 0 = ~ .
.. c + i ^
x 1 ( * ) = - 2 n i J d U ( Р ) ^ V ( Р )d Р = c - i ^
= - 1- U ( Р ) • V ( Р )
2 n i
p =+ i ^
p =- i ^
+
1 c + i то
+ 2 П J U ( Р ) ’ d V ( Р )d P = c - i to
=--X
2 n i
^ c + i to
J ePt 0 F ( p ) Q ( p ) ф 1 ( p ) X
^ c - i to
параметрическая передаточная функция системы по первой координате.
Таким образом, решение задачи Коши сведено к вычислению интегралов (15), (16), (17). В случае если начальные условия не равны нулю, в исходной системе уравнений (9) необходимо сделать обычную замену переменных [5]:
p
X Ф "*( P ) J ez
TO
ОЙ
Ф ( z )d z d p
J
где т = t - t 0.
Таким образом, искомое решение по первой координате может быть представлено в виде
1 1 mx ,m;
x j = x j о + x j0 • t + •" +---- x j 0 j • t j + У], (18)
m j -!
(j = 1, 2, 3),
x i ( t ) =
c + i то
1 c + i
= у J № ( P ) •
2m Л 1
e"p T Q ( P ) Ф 1 ( P ) X
c - i to
p
X ф 4( p ) J ez T
TO
----ф ( z )d z
Q ( z )
■ d p .
Выражение, стоящее в квадратных скобках формулы (15), представляет собой параметрическую передаточную функцию линеаризованной нестационарной системы управления бесконтактным транспортным средством по воздействию с изображением F^ ( p ).
Решение по остальным координатам в изображениях может быть получено из первого и третьего уравнений системы (10) после применения пре-образованияЛапласа:
где x j 0, x ]-0, — x ™0 — начальные условия по j -й координате и ее производным до m j -го порядка включительно.
После замены переменных (18) решение системы (9) сводится к решению этой же системы, но относительно новых переменных у5 с нулевыми начальными условиями и с измененными правыми частями.
В случае, когда для электромагнитной подвески используется несколько электромагнитов, система уравнений (9) преобразуется к виду
^^1 = x 2 + f , ;
x 2 = a 21 x 1 + a 22 x 2
x 3 = a 31 x 1 + a 32 x 2
1 -
+ ——^ a 2 j x j + f 2 ;
t 1 0 j = 3
n
+ ^ a 3 j x j + f 3;
j = 3
x 2 ( t ) =
- c + i то
= — J e ^ [- f l ( P ) + PF ( P)T ( P , T ) ] d P , (16)
2m J 1
c - i to
x
n
n
- a a +> a -x - + f .
n 11 n 2 2 / > nj / Jn , j=3
- c+i to „ x3(t) 2 .X J ept —-—dp,
2ni p - алл c - ito r 33
где
5 = f 3 ( P ) - a 32 f l ( P ) + ( a 31 + a 32 P ) Fzx ( P ) T ( P , т );
T ( P , т ) =
p 1
= e" p T Q ( p ) Ф 1 ( p ) • ф -1 ( p )J ez T — ф ( z )d z - TO Q ( z )
где x j (j' = 3, 4,^, n ) — обобщенные управляющие воздействия, соответствующие j -му электромагниту; ay ( i = 2,^, n; j = 1, 2,^, n ) — постоянные коэффициенты, n - 2 — количество электромагнитов.
В отличие от модели (9) модель (19) содержит ( n - 2) переменных коэффициентов. Покажем, что модель (19) приводима к системе с переменным коэффициентом лишь при одной переменной x 1 .
Умножим второе уравнение системы (19) на ( t - 1 0). Тогда система (19) преобразуется в систему с одним линейно изменяющимся коэффициентом при одной координате вектора состояния
( t - t o )( x - a 21 x 1 - a 22 x j = n
= ^ a 2 j x + ( t - t 0 )( f 2 - a 22 f I );
j = 3
n x 3 = a 31 x 1 +2 a 3 jxj + f3; (20)
j = 3
n x = a + У a x + f . n n1 1 nj j n .
j = 3
В системе уравнений (20) переменный коэффициент содержится лишь в первом уравнении при одной переменной x 1 и ее производных, что позволяет решить задачу аналогично рассмотренной выше модели с одномерным бесконтактным подвесом.
ОСОБЕННОСТИ МОДЕЛИРОВАНИЯ
Движение транспортного средства в вертикальной плоскости в общем случае происходит под действием управляющего воздействия, демпфирующих и гравитационных сил. Состояние статического равновесия в бесконтактных подвесах в соответствии с теоремой Ирншоу является неустойчивым, поэтому система подвешивания работает в режиме установившихся колебаний с достаточно малой амплитудой.
Работа системы происходит следующим образом. Управляющее воздействие q приводит ВТ в движение во взвешенном состоянии. В момент времени t = t *, соответствующий достижению ко *
ординатой x 1 заданного значения x 1 , параметры управляющего воздействия q 0 и kq изменяются так, что система начинает движение в обратном направлении. После достижения первой координатой значения x 1 = x 0 восстанавливаются параметры управляющего воздействия, соответствующие движению ВТ в прямом направлении, и цикл повторяется. Вертикальное движение бесконтактного транспортного средства как в прямом, так и в обратном направлениях моделируется системой уравнений (20).
ЗАКЛЮЧЕНИЕ
Предложенная в работе модель бесконтактного подвеса может быть отнесена к классу моделей линейных нестационарных систем управления с особой точкой. Модель может быть использована для анализа и синтеза недифференциальных схем систем управления гироскопами и бесконтактными транспортными средствами.
Список литературы Модель бесконтактного транспортного средства как системы с особой точкой
- Сапожников Г.А., Богословский С.В., Кизимов А.Т. Теория и практика измерительных электромагнитных подвесов. СПб.: СПбГУАП, 2001. 384 с.
- Тихонов А.Н., Васильева А.Б., Свешников А.Г. Дифференциальные уравнения. М.: Наука, 1985. 231 с.
- Богословский С.В., Богословский В.С. Динамика нестационарных систем с равномерно изменяющимися во времени коэффициентами//Научное приборостроение. 2002. Т. 12, № 3. С. 83-92.
- Воронов А.А. Основы теории автоматического управления. М.-Л.: Энергия, 1965. 396 с.
- Н.Д. Егупов, К.А. Пупков. Методы классической и современной теории автоматического управления. Том 1. Анализ и статистическая динамика систем автоматического управления. -М.: Изд-во МГТУ им. Н.Э. Баумана, 2000. -748 с.
- Н.Д. Егупов, К.А. Пупков. Методы классической и современной теории автоматического управления. Том. 2. Синтез регуляторов и теория оптимизации систем автоматического управления. -М.: Изд-во МГТУ им. Н.Э. Баумана, 2000. -736 с.
- Н.Д. Егупов, К.А. Пупков. Методы классической и современной теории автоматического управления. Том. 3. Методы современной теории автоматического управления. -М.: Изд-во МГТУ им. Н.Э. Баумана, 2000. -748 с.
