Модель навигационного комплекса с возможностью реализации отложенной обработки измерений текущих навигационных параметров

Автор: Богданов М.Н., Головачев А.С., Коваленко А.Ю., Толмачев А.А., Лютиков И.В.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 2 т.19, 2026 года.
Бесплатный доступ
В статье представлено описание математической и имитационной моделей функционирования бортового навигационного комплекса космического аппарата для случая, когда аппарат выполняет задачу мониторинга космических объектов в условиях дискретного или отсутствующего навигационного поля. Такой характер навигационного поля проявляется при нахождении космических аппаратов на высотах свыше 2000 км над поверхностью Земли (для системы ГЛОНАСС). Для достижения требуемых оперативности принятия решений и точности измерений предлагается расширить состав комплекса и применять в процессе вычислений отложенную обработку. В состав предлагаемого комплекса включены: бесплатформенная инерциальная навигационная система, аппаратура потребителя спутниковых навигационных систем и программно-конфигурируемое радиоприемное устройство. Осуществлена имитация получения разнородных измерений, а также их совместная обработка навигационным комплексом при условии, что схема комплексирования – сильносвязанная. Предполагается, что в указанных условиях обстановки программный приемник может получить измерения текущих навигационных параметров (в разработанной модели – дальность и радиальная скорость) за счет некогерентного накопления. По результатам обработки производится оценка текущего местоположения потребителя, по которой определяется точность на заданном интервале времени рассматриваемого комплекса.
Космический аппарат, измерения текущих навигационных параметров, бесплатформенная инерциальная навигационная система, программно-конфигурируемое радиоприемное устройство, спутниковая навигационная система, навигационная аппаратура потребителя, система ГЛОНАСС
Короткий адрес: https://sciup.org/146283270
IDR: 146283270 | УДК: 629.783
Navigation System's Model with the Possibility of Implementing Deferred Processing for Measurements of Current Navigation Parameters
The article presents a description of mathematical and simulation models of the functioning of the on-board navigation system of a spacecraft for the case when the device performs the task of monitoring space objects in conditions of a discrete or absent navigation field. This type of navigation field is manifested when spacecraft are located at altitudes above 2000 km above the Earth’s surface (for the GLONASS system). In order to achieve the required decision-making speed and measurement accuracy, it is proposed to expand the composition of the complex and apply deferred processing in the calculation process. The proposed complex includes: a free-form inertial navigation system, consumer equipment for satellite navigation systems and a software-configurable radio receiver. The simulation of obtaining heterogeneous measurements was carried out, as well as their joint processing by the navigation system, provided that the integration scheme is strongly coupled. It is assumed that under the specified environmental conditions, the software receiver can obtain measurements of current navigation parameters (range and radial velocity in the developed model) due to incoherent accumulation. Based on the results of processing, the current location of the consumer is estimated, which determines the accuracy at a given time interval of the complex in question.
Текст научной статьи Модель навигационного комплекса с возможностью реализации отложенной обработки измерений текущих навигационных параметров
В настоящее время наблюдается тенденция на использование аппаратуры потребителя (АП) спутниковых навигационных систем (СНС) в составе бортового навигационного комплекса (БНК) космических аппаратов (КА). Происходит это в целях уменьшения количества внешних траекторных измерений текущих навигационных параметров (ТНП) КА. Навигационная аппаратура потребителя (НАП) выполняет измерение первичных радионавигационных параметров в непрерывном навигационном поле в диапазоне высот от 0 до 2000 км, в прерывистом навигационном поле – от 2000 до 40000 км, а также в условиях полного его отсутствия – на высотах больше 40000 км над поверхностью Земли (для системы ГЛОНАСС).
КА, выполняющие задачу мониторинга космических объектов в ближней и дальней операционной зоне, нуждаются в достижении высокой оперативности и точности определения параметров движения (ПД), которые способны обеспечить только НАП [1]. Однако проблема дискретности или отсутствия навигационного поля вынуждает включить в состав БНК дополнительные технические средства (ТС), позволяющие БНК КА решать задачу определения текущего местоположения (ТМ).
Точность существующих альтернатив не удовлетворяет требованиям, предъявляемым к указанным КА [2], поэтому в данной статье предлагается использовать отложенную обработку измерений ТНП.
Обоснование состава бортового навигационного комплекса космического аппарата
Из существующих ТС БНК наибольшей автономностью обладают бесплатформенные инерциальные навигационные системы (БИНС) [3], поэтому данное средство зачастую становится основным в составе комплекса. Для навигационных измерений в космическом пространстве БИНС не подходит из-за природы орбитального движения: инерциальная система измеряет кажущееся ускорение (с помощью акселерометров), которое в условиях невесомости становится близким к нулю, а гравитационное ускорение акселерометры измерять не могут в связи с его компенсацией центробежной силой (в условиях орбитального движения). Поэтому акселерометры могут быть полезны только при осуществлении маневра КА. При этом датчики угловой скорости (гироскопы), которые также являются составной частью БИНС, активно применяются в существующих БНК для вычисления ориентации КА. Такой вариант построения БИНС (без применения акселерометров) называют бесплатформенной системой ориентации (БСО) [4].
В рассматриваемой модели БИНС играет решающее значение только потому, что в рамках исследования имитация измерений БИНС основывалась на теоретической модели гравитации – в реальных БНК такой подход применен быть не может, поэтому для оценки ТМ КА рекомендуется использовать астронавигационные системы и БСО.
В случае, когда произвести измерения с помощью НАП спутниковых систем не представляется возможным (по причинам низкого количества или полного отсутствия видимых НКА), предлагается использовать отложенную (апостериорную) обработку измерений, получаемых с помощью АП СНС. Идея отложенной обработки заключается в повышении точности измерений за счет уточнения прошлого вектора состояния КА с последующей экстраполяцией на текущий момент времени.
Если у потребителя периодически появляется возможность приема навигационных сигналов (НС), но время приема ниже времени «горячего старта» [5] (что делает невозможным штатное применение НАП), предлагается использовать в составе БНК программно-конфигурируемое радиоприемное устройство (ПКРУ). ПКРУ должно осуществлять прием НС (на соответствующей несущей частоте и с фиксированной полосой пропускания) и производить запись принятых данных, которые в дальнейшем используются для поиска и обнаружения сигналов СНС. Для обнаружения НС в условиях дискретного или отсутствующего навигационного поля необходимо произвести накопление модулей взаимной корреляционной функции принимаемого и опорного сигналов (некогерентное накопление) [6]. Процесс накопления занимает время, поэтому в БНК решается задача прогнозирования измерений ТНП на основании уже принятых и обработанных данных от НАП, а также непрерывная оценка измерений за счет альтернативных ТС. Полученные величины времен задержки и доплеровских смещений частоты (для каждого найденного сигнала) позволяют определить псевдоизмерения дальностей до доступных НКА и их радиальных скоростей. Так, измерения от ПКРУ включаются в алгоритм отложенной обработки и в совокупности с измерениями БИНС (и прочих ТС БНК) обеспечивают требуемую точность определения ТМ КА [2].
В состав рассматриваемого БНК входят: БИНС; НАП – для штатного режима работы; ПКРУ; буферное запоминающее устройство (БЗУ) – для записи данных с ПКРУ; НП – для обработки и оценки измерений; бортовое синхронизирующее устройство (БСУ) – для синхронизации независимых измерений.
В данной статье представлены результаты имитационного моделирования функционирования БНК с возможностью реализации отложенной обработки псевдодальностей от КА до НКА ( Rk ). Также предполагается получение с помощью представленной модели измерений радиальной скорости Rk (с учетом особенностей её вычисления в предлагаемом БНК).
Структура модели бортового навигационного комплекса космического аппарата
Из структуры модели (рис. 1) видно, что результатом на выходе является вектор состояния (ВС) КА в^ в i -й момент времени орбитального движения, который можно представить следующим образом:
^ = [*,- > Я Л ^ , ^, ^, 'A, ^, £ ’ Q™HC, QiHC ] , (1)
где X.^iJ, – оценка местоположения КА в системе координат ПЗ-90; Vxi,Vyi,Vzi – оценка проекций скоростей КА; *М,У, – оценка ориентации КА: углов рыскания, тангажа и крена соответственно; qEHHC – вектор ошибок датчиков БИНС; QCHC – вектор ошибок АП СНС (ПКРУ и НАП).
Исходными данными для функционирования модели являются:
-
- модель динамики погрешностей средств измерений из состава БНК;
-
- нестабильность бортового стандарта частоты и погрешности БСУ;
-
- начальное положение и ориентация КА;
-
- эфемеридно-временная информация (ЭВИ) НКА СНС на момент начала измерений БНК. Ограничения представленной модели:
-
- использование системы ГЛОНАСС;
-
- в качестве НС рассматривались BPSK-сигналы для частотных диапазонов L1 и L2.
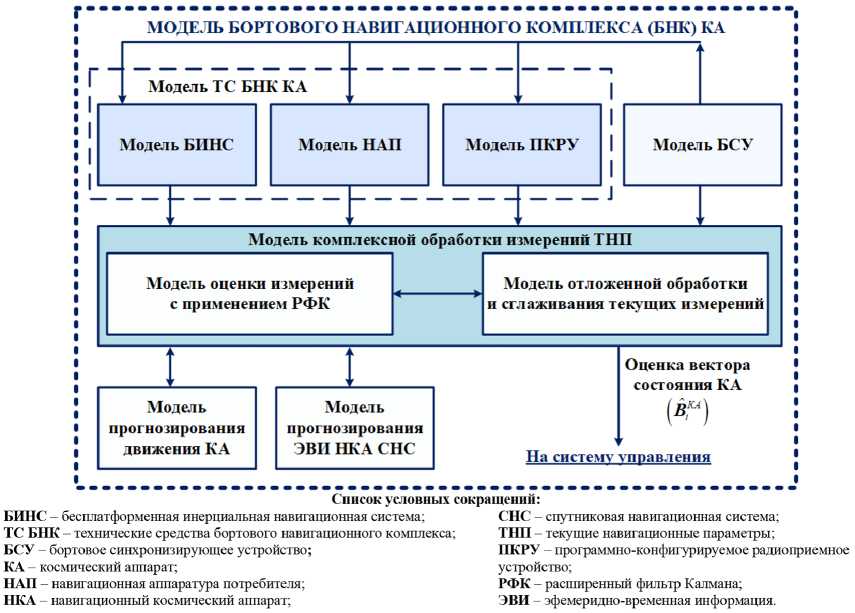
Рис. 1. Структура модели комплексной обработки измерений ТНП в БНК КА
Fig. 1. The structure of the integrated measurement processing model for measurements of current navigation parameters in the onboard navigation system of the spacecraft
Для анализа эффективности предлагаемой модели осуществляется имитация функционирования БНК, для этого:
-
- использована эфемеридно-временная информация (ЭВИ) из SP3 файлов, которые содержат синхронизированные по времени координаты и поправки часов для НКА системы ГЛОНАСС на заданном временном интервале;
-
- прогнозирование ЭВИ НКА осуществляется интегрированием уравнений движения методом Рунге-Кутта четвертого порядка [7] (рис. 2);
-
- на основании истинных траекторий и результатов измерений НАП производится анализ реальных погрешностей АП СНС на заданный интервал времени (систематических и случайных);
-
- модель погрешностей для АП СНС составлена по [6];
-
- пространственный геометрический фактор как показатель, оказывающий влияние на точность определения ТМ потребителем СНС, вычисляется в соответствии с [8] и учитывается в оценке точности измерения псевдодальности;
-
- имитация измерений БИНС осуществляется на основании математической модели погрешностей из [3, 9].
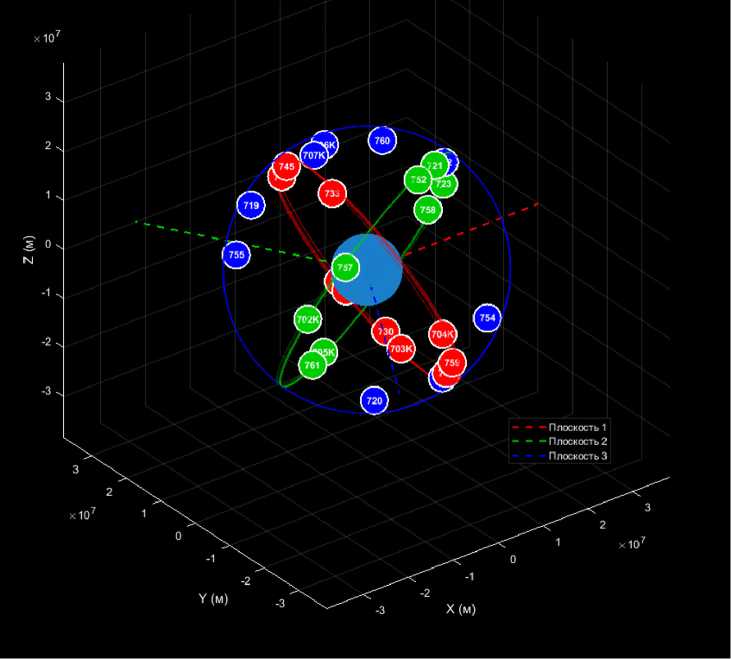
Рис. 2. Визуализация модели орбитального движения НКА системы ГЛОНАСС
Fig. 2. Visualization of the GLONASS spacecraft orbital motion model
Модель погрешностей технических средств бортового навигационного комплекса
Выражение для измерений АП СНС псевдодальностей от КА до k -го НКА можно представить в виде [6]

где В™ (О = [^(0, У^^\ z^W – ВС k -го НКА на определенный момент времени в геоцентрической прямоугольной неинерциальной системе координат (ГПНСК); B^^ = [xf\t\y^(t\z^^ – ВС КА в ГПНСК; δN k, l( t ) – факторы, влияющие на точность кодовых измерений псевдодальности и выраженные в единицах длины; ||•|| – норма вектора в Евклидовом пространстве.
К факторам δN k, l( t ), справедливым для орбитального движения КА, относятся такие, как: нестабильность опорных генераторов, формирующих шкалу времени, как на борту k -го НКА, так и на борту КА; влияние релятивистского эффекта; смещение и вариация фазовых центров антенн и многие другие [6].
В БИНС погрешности рассматриваются индивидуально для каждого из датчиков системы. Вектора погрешностей от датчиков (акселерометров δA k и гироскопов δG k) формируют матрицу ошибок датчиков БИНС Q™HC = [SA^,SG^] . Так, выражение для измерений кажущихся ускорений n k БИНС в связной системе координат (ССК):
ъ (0=(1+^ (0) • пк (О +Т/А™ (О, (3)
где n k( t ) – истинное кажущееся ускорение вдоль k -й оси ССК; ^ак (О – погрешность коэффициента преобразования k -го акселерометра; ^^ – суммарная аддитивная погрешность k -го акселерометра.
К погрешностям ёА^ (z) относятся: смещение нуля акселерометра; «случайное блуждание скорости» (VRW – Velocity Random Walk) и ошибка ввода начальных условий [9].
Выражение для измерений в БИНС угловых скоростей ω k в ССК:
<5, ('H1+Afc> WH W+X^W; (4)
7=1
где ω k( t ) – истинная угловая скорость вдоль k -й оси ССК; ^K (0 – погрешность коэффициента преобразования k -го гироскопа; sg^^ – суммарная аддитивная погрешность k -го гироскопа.
К погрешностям ■56“ « относятся: смещение нуля гироскопа; «случайное блуждание угла» (ARW – Angle Random Walk); ошибка ввода начальных условий [9].
Использование измерений угловой скорости от гироскопов ω k необходимо для уточнения измерений акселерометров [3], поэтому углы ориентации входят в состав ВС КА и необходимы для достижения высокой точности определения ТМ БНК КА.
Интегрирование величин ^k (0 и 4(0 формирует оценку ВС КА (1) на основании измерений только от БИНС:
-БИНС -БИНС -БИНС т> БИНС т> БИНС Тл БИНС -БИНС ОБИНС -БИНС
Q™HC]T . (5)
Х, , У, , Zi , 4 , Ui , 4 , 4 , fy , Yi
В описываемой модели подразумевается использование сильносвязанной схемы комплек-сирования [1], поэтому НП на основании знания прогнозируемого вектора состояния КА в фиксированный момент времени B^t) и величин }~h (О и 4 (О должен вычислять значения псевдоизмерений дальностей R™HC^ и радиальных скоростей кшс^ .
Представленные математические модели измерений АП СНС и БИНС (с учетом возникающих погрешностей) позволяют разработать полную имитационную модель БНК с возможностью реализации отложенной обработки измерений ТНП. Такая модель предназначена для анализа оптимальности предлагаемого состава БНК и предложенного метода обработки и ком-плексирования.
Модель комплексной обработки измерений текущих навигационных параметров
Комплексная обработка измерений ТНП происходит в двух режимах: реального времени и апостериорном режиме.
В режиме реального времени применяется алгоритм комплексирования измерений БИНС и НАП (в случае возможности получения измерений от НАП) на основе расширенного фильтра Калмана (РФК).
Дискретная модель системы для РФК:
xi = Ф (z, z -1) + Г(z -1) • w(z -1), (6)
где x i – истинное состояние системы (значение R k( i )) в момент i ; Ф( i , i – 1) – матрица перехода состояния от i -1 к i ; Г ( i – 1) – матрица возмущения состояния; w ( i – 1) – вектор белых шумов системы.
Матрица перехода Ф( i ) и вектор белых шумов w ( i ) формируются на основании априорной информации о погрешностях БИНС Qi .
Уравнения прогноза РФК:
Vi=o(^'-1)^(/-1l'-1);
Р|н=Ф(/,/-1)-Р(/-1|/-1)-Фт(/,/-1)+Г(;-1)-е(/-1)-Гт(/-1)
где Лр-i – априорная оценка состояния (прогноз на шаг i по данным i-1); Pi|i-1 – априорная ковариационная матрица ошибок оценки; Q(i – 1) – матрица шумов процесса, включающая погреш-^БИНС ности БИНС Qi .
Модель измерений (коррекции):
Zi=Hi-Xi+Vi
где zi – вектор измерений MQ, Л (О, «„(О’ ^(0; Hi – матрица наблюдений; vi – вектор бе-^БИНС ^СНС лых шумов измерений, включающий в себя Q, , Qi .
Уравнения коррекции:
Kf = р^ • Hf (я. • р^ • н' + Rf) ;
x^^-i+K^-Hp*^ (9) р =(I-K -H,}p где Ki – коэффициент усиления Калмана на временном шаге i; Ri – ковариационная матрица шумов измерений; "^zjz – апостериорная оценка измерений; Pi|i – апостериорная ковариационная матрица ошибок; I – единичная матрица.
В случае реализации отложенной КО (на основании измерений ПКРУ) применяется модификация алгоритма сглаживания Рауха-Тунга-Стрибела для фиксированного числа наблюдений (измерений). Особенность модификации заключается в способности применения данного алгоритма в динамичной системе, то есть постобработка осуществляется в условиях движущегося потребителя и сглаживание измерений происходит в определенные моменты времени орбитального движения КА:
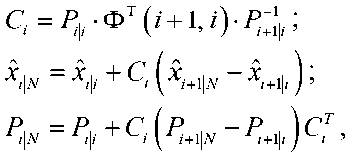
где C i – матрица коэффициентов усиления сглаживания на шаге i ; Ф( i + 1, i ) – матрица перехода состояния от момента i к i +1; P i+1|i – априорная ковариационная матрица на шаге i +1; 0|v – сглаженная оценка состояния в момент i по всем данным до N ; N – конечная точка обрабатываемого сегмента данных; P i| N – сглаженная ковариационная матрица ошибок.
Применение фильтрации и сглаживания измерений позволяет повысить точность определения ТМ БНК КА (по сравнению с точностью автономного ТС БНК) до значения потенциальной точности (с учетом систематических погрешностей) для БНК с применением СНС в космическом пространстве.
Расширение состава БНК позволит повысить точность определения ТМ, но при этом возникающая избыточность измерений снижает скорость вычислений. Оперативность решения зависит от производительности НП.
Результаты моделирования функционирования бортового навигационного комплекса
Моделирование проводилось с учетом следующих ограничений.
-
– Имитация измерений БИНС предполагает измерения в пространстве на основании показаний трех разнесенных акселерометров и датчиков угловой скорости. Реализация численных алгоритмов (кинематических уравнений) производилась в гиперкомплексной конструкции, систематизирующей параметры Родрига-Гамильтона – кватернионе.
-
– Погрешности измерения ТНП ПКРУ и погрешности определения ТМ НАП моделировались в соответствии с учетом космической среды, орбитального движения КА и особенностей системы ГЛОНАСС [7].
-
– Исследовалось функционирование БНК КА, выполняющего задачу мониторинга космических объектов в дальней операционной зоне (ДОЗ), дальность нахождения такого КА от поверхности Земли достигает до 42000 км.
Результаты моделирования представлены на рис. 3.
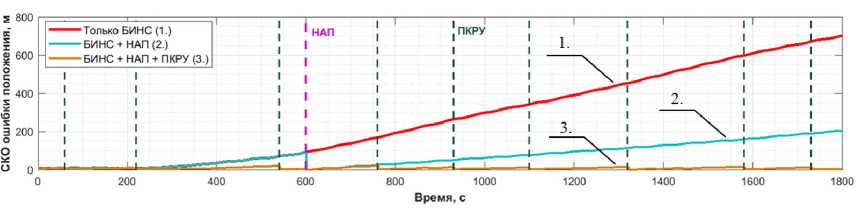
Рис. 3. Результаты комплексной обработки измерений текущих навигационных параметров
Fig. 3. Results of complex processing of measurements of current navigation parameters
Таким образом, девять раз за время имитационного моделирования орбитального движения (30 минут) КА и функционирования БНК в обработку принимались измерения от ПКРУ, не считая момента начальной выставки навигационных параметров. НАП в данной реализации участвовала в формировании оценки измерений один раз.
Применение только БИНС для оценки ВС КА, функционирующего в ДОЗ, нецелесообразно, требуется компенсировать растущие ошибки с помощью дополнительных ТС БНК. Уточнение измерений БИНС с помощью использования ПКРУ и отложенной обработки позволяет достичь СКО определения ТМ в районе 6 м, что для КА, БНК которого не использует уточнения измерений от СНС с помощью функциональных дополнений и не применяет дифференциальных режимов, а также прочих аналогичных методов коррекции навигационных параметров, является высоким результатом и удовлетворяет предъявляемым требованиям [2].
Заключение
Автономные ТС БНК не способны обеспечить высокую точность определения ТМ без использования измерений от АП СНС.
Отложенная обработка способна решить теоретическую проблему низкой длительности приема НС, а фильтрация и сглаживание измерений позволяют добиться требуемой точности определения ТМ.
Разработанная модель БНК КА позволяет с определенными ограничениями произвести имитацию измерений БНК, а также демонстрирует эффективность использования отложенной обработки измерений ТНП как способ, обеспечивающий оперативность (за счет наличия БИНС) и точность (за счет наличия ПКРУ) определения ПД КА, выполняющего задачу мониторинга космических объектов.
Предлагаемый состав БНК может быть рекомендован при практической реализации комплексов, функционирующих в условиях дискретного или отсутствующего навигационного поля.
