Модели роевого управления группой дронов в условиях неопределенности

Автор: Г.Н. Мятов, П.О. Скобелев
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 1 т.28, 2026 года.
Бесплатный доступ
Статья посвящена новым моделям и методам роевого управления группой дронов, которые становятся актуальными в условиях применения в среде с априорной неопределенностью и высокой динамикой. Данный класс моделей и методов стремительно развивается благодаря быстрому техническому прогрессу и появлению автономных дронов с искусственным интеллектом на борту. Показывается тенденция перехода от жестких моделей централизованного иерархического управления, использующих простейшие дроны – к более сложным децентрализованным и распределенным моделям и методам управления, построенным на природоподобных принципах самоорганизации и эволюции, присущих колониям муравьев, рою пчел, стаям рыб и т.д. Широкий класс такого рода моделей в литературе часто называют общим термином «роевые», но на самом деле под этим термином скрывается целый ряд совершенно различных моделей и методов, что требует уточнения известной в литературе классификации. Дается классификация перспективных моделей и методов коллективного интеллекта, эволюционирующих в направлении эмерджентного интеллекта – коллективного искусственного интеллекта, возникающего в открытых самоорганизующихся системах, отличающихся принятием согласованных решений в консенсусе. Обоснован выбор применения принципов сетецентрического управления, онтологий и мультиагентных технологий для создания нового поколения интеллектуальных систем роевого управления группами дронов с коллективным интеллектом и показаны их преимущества при решении сложных задач в различных областях применения.
Искусственный интеллект, группа дронов, модели и методы, роевое управление, связь, децентрализованное и распределенное управление, эмерджентный интеллект, адаптация
Короткий адрес: https://sciup.org/148333257
IDR: 148333257 | УДК: 004.896 | DOI: 10.37313/1990-5378-2026-28-1-183-189
Swarm Intelligence Models for Managing Groups of Drones in the Face of Uncertainty
The article is devoted to new models and methods of swarm control of a group of drones, which become relevant in an environment with a priori uncertainty and high dynamics. This class of models and methods is rapidly developing due to rapid technological progress and the advent of autonomous drones with artificial intelligence on board. The paper shows a tendency to move from rigid models of centralized hierarchical management using the simplest drones to more complex decentralized and distributed models and management methods based on nature–like principles of self-organization and evolution inherent in ant colonies, swarms of bees, schools of fish, etc. A wide class of such models in the literature is often referred to by the general term “swarm” But in fact, this term hides a number of completely different models and methods, which requires clarifying the classification known in the literature. A classification of promising models and methods of collective intelligence is given, evolving in the direction of emergent intelligence, collective artificial intelligence that arises in open self– organizing systems characterized by consensus decision-making. The choice of applying the principles of network-centric management, ontologies and multi-agent technologies to create a new generation of intelligent swarm control systems for groups of drones with collective intelligence is substantiated and their advantages in solving complex tasks in various fields of application are shown.
Текст научной статьи Модели роевого управления группой дронов в условиях неопределенности
Искусственный интеллект, автономия в принятии решений группой дронов, как в воздухе, так и на Земле — вот ключевая технология, которая сможет обеспечить конкурентное преимущество в любом народнохозяйственном проекте.
Однако, внедрение в дронов искусственного интеллекта для повышения уровня автономности в принятии решений – лишь первый шаг на этом пути. Вторым важным шагом должно стать объединение автономных дронов в самоорганизующиеся группы («рои»), в которых поддерживается прямое взаимодействие между дронами и обеспечивает коллективное принятие решений, что сделает группы дронов многократно более мощными, гибкими и эффективными и повысит сложность и надежность решения поставленной задачи. В особенности, эти возможности становятся востребованными в неопределенной и изменчивой, недетерминированной среде, а также при отсутствии канала связи с наземным пунктом управления.
Для решения проблемы объединения автономных дронов в самоорганизующиеся группы требуется разработка новых моделей и методов коллективного принятия решений, использующих сетевое взаимодействие друг с другом для гибкого планирования и перераспределения задач между дронами и их интеграции в единую многоярусную сеть беспилотных систем в разных средах, совместно решающих сложную задачу в рамках общего замысла.
КЛАССИФИКАЦИЯ МОДЕЛЕЙ РОЕВОГО УПРАВЛЕНИЯ ГРУППОЙ ДРОНОВ
Для решения одной общей задачи группой дронов, возможные действия каждого дрона в группе должны быть заранее специфицированы и в зависимости от ситуации уточнены и декомпозированы до уровня подзадач и связаны между собой, а также распределены, запланированы и оптимизированы и согласованы дронами между собой.
Выбор модели организации «роя» дронов в группе во многом определяется функциональными возможностями каждого дрона и условиями их эксплуатации. Возможные модели могут быть весьма разнообразны, начиная от полностью централизованного - к более распределенному и децентрализованному, и далее – к полной самоорганизации, требующей создания методов и средств коллективного искусственного интеллекта группы [1, 8].
В литературе задача управления группой дронов обычно рассматривается как для случая детерминированной среды, где каждый дрон может выполнять заранее определенную последовательность действий, так и для случая недетерминированной динамической среды, когда сама последовательность действий должна быть найдена системой управления группой дронов в процессе достижения цели [2-5]. Суть такой новой задачи управления группой дронов сводится к отысканию и реализации цепочки действий каждого отдельного дрона группы, которые приводили бы к оптимальному, с точки зрения выбранного критерия, достижению общей цели.
В работе [6] предлагается одна из классификаций видов группового управления, которая представлена на рисунке 1, как стратегия объединения групп дронов с целью их управления. Анализ развития группового управления в технических системах показывает, что это развитие осуществляется от централизованных - к децентрализованным стратегиям [2, 6, 7].
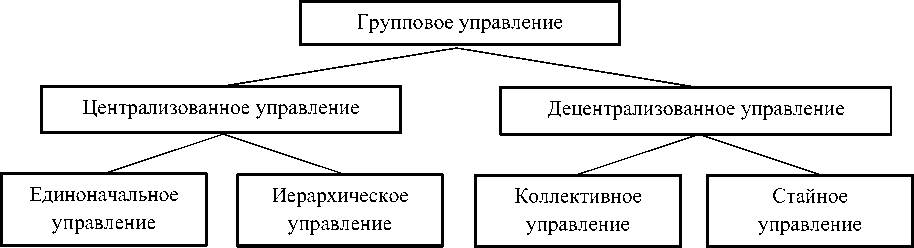
Рисунок 1 - Классификация видов группового управления
Можно сделать общий вывод, что чем больше неопределенности и недетерминизма в среде, тем более эффективны, с точки зрения достижения общей групповой цели, принципы децентрализованного и распределенного управления.
Децентрализованное управление, в свою очередь, подразделяется на два вида:
-
- коллективное управление («каждый с каждым» и «равный с равным») – в группе нет командира, все члены группы равноценны. Каждый член группы самостоятельно принимает решения и делится информацией с остальными членами группы о выполняемых действиях;
-
- стайное (ролевое) управление - отличается от коллективного управления отсутствием между членами группы прямого обмена информацией. Слаженные действия членов группы осуществляются благодаря косвенной информации, получаемой каждым членом группы, например, по движению ближайших соседей.
При использовании децентрализованной коллективной модели группового управления каждый объект группы принимает решение о своих действиях самостоятельно, информируя о своем выборе всех остальных членов группы, в ожидании их реакции для последующего учета, с целью оптимизации итогового группового решения. На основании получаемой информации все остальные члены группы корректируют свои действия с учетом действия, выбранного данным объектом.
Применительно к группе дронов в варианте коллективного управления можно сформулировать следующие основные принципы управления [2]:
-
. каждый дрон группы самостоятельно, на основе заданной ему задачи, формирует свое управление, т.е. выбирает и планирует свои действия, в текущей ситуации;
-
. формирование плана дроном осуществляется только на основе информации о задачи, стоящей перед группой, о ситуации в среде в предыдущий отрезок и в текущий момент времени, о предыдущих и текущих состояниях и действиях других дронов группы;
-
. в качестве оптимального действия каждого дрона группы в текущей ситуации понимается такое, которое вносит максимально возможный вклад в достижение коллективной задачи или, иными
словами, дает максимально возможное приращение целевого функционала при переходе групповой системы из текущего состояния в желаемое;
-
. оптимальное управление реализуется дронами группы в течение ближайшего отрезка времени в будущем, а затем определяется новое управляющие решение;
-
. допускается принятие компромиссных решений, удовлетворяющих всех дронов группы, то есть каждый дрон группы может отказываться от действий, приносящих ему максимальную выгоду, если эти действия приносят малые выгоды или даже ущерб группе в целом.
Стайная модель управления подразумевает, что каждый объект, входящий в группу, не имеет никакой информационной связи с другими объектами и более того, может даже не знать, ни сколько еще объектов входит в его группу, ни их характеристики [6]. Единственным источником информации о действиях других дронов группы является среда, в которой они функционируют. Действия дронов вырабатываются на основе зафиксированных с помощью своих сенсоров изменений состояния среды. Управление осуществляется на основании косвенной информации об изменениях состояния среды, вызванных действиями других объектов, входящих в группу, каждый объект должен уметь адаптировать свои действия по факту под действия всех остальных объектов группы с целью оптимизации процесса решения поставленной перед группой дронов задачи.
Применительно к группе дронов в варианте стайного управления можно сформулировать следующие основные принципы управления [2]:
-
. дроны не связаны прямыми информационными каналами;
-
. каждый дрон располагает информацией о цели, поставленной перед группой, а также получает информацию о состоянии среды в результате собственных измерений;
-
. каждый дрон располагает адаптивной моделью индивидуального влияния на среду;
-
. адаптация индивидуальных моделей влияния на среду, самообучение дронов осуществляется дронами на основе анализа результатов индивидуальных измерений реакции среды на совместные действия группы.
По современной зарубежной литературе наглядно видно, что стремительная интеллектуализация борта дрона за рубежом вызывает появление новых, более продвинутых роевых моделей управления группами дронов. В отечественной же литературе пока лишь наблюдаются первые робкие попытки перехода к более сложным распределенным и децентрализованным моделям самоорганизации в группах дронов, что требует более продвинутых технических средств.
Для развития предлагаемого направления предлагается выделить следующие уровни усложняющейся «роевой» модели управления с нарастающей степенью распределенности в принятии согласованных коллективных решений (рис. 2):
Централизованная координация
Иерархическая координация
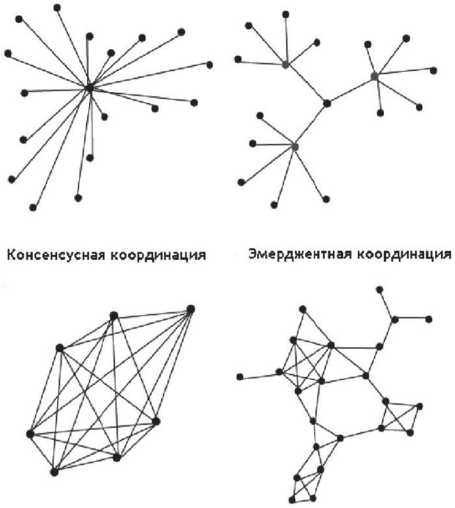
Рисунок 2 . Роевые модели управления
ников, как это наблюдается в стаях волков или
в
-
- централизованное управление, где элементы группы предельно просты и только передают информацию центральной интеллектуальной системе управления группой дронов для распределения, планирования, оптимизации, мониторинга и контроля исполнения задач в группе (далее для краткости - «Планировщику»), которая рассуждает в ситуации и ставит задачи каждому элементу в отдельности;
-
- иерархическое управление, где отдельные элементы «роя» планируются и контролируются программными агентами, играющими роль «руководителей подразделений», которые в свою очередь, управляются агентам и более высокого уровня подразделений, и, аналогично, выше;
-
- роевая координация, которая строится на прямом или косвенном взаимодействии агентов соседних элементов роя, реагирующих не на приказы руководителей своих подразделений, но на поведение ближайших соседей, как делают стаи насекомых, птиц или рыб;
-
- командный интеллект с элементами иерархии, основанной на опыте и знаниях участ-командах по проектам, с динамическим выдви-
жением лидеров команд под возникающие проблемные ситуации, которым делегируется право принимать решение за всю группу;
-
- коллективный интеллект, в котором элементы роя напрямую взаимодействуют друг с другом, на принципах конкуренции и кооперации, но принимают решения только в консенсусе, например, путем голосования, методом аукционов, методом компенсаций и других;
-
- эмерджентный интеллект - коллективный интеллект открытых самоорганизующихся систем, в которых система дополнительно способна самообучаться и изменять правила своего функционирования в базе знаний и даже менять свой собственный исходных код.
Таким образом, для действий в условиях неопределенности и динамики среды предлагается развитие роевой модели управления в варианте коллективно-консенсусного и эмерджентного исполнения, которые призваны обеспечить большую оперативность, производительность и эффективность решения народнохозяйственной задачи.
Но, несмотря на относительную проработку вопросов общей теории, подходов в создании моделей и алгоритмов группового управления группами дронов [2, 6], в настоящее время на рынке отсутствуют цифровые платформы для реализации перспективных моделей и методов управления в самоорганизующихся системах автономных дронов с принятием согласованных решений в центральном узле сети или непосредственно на борту.
ВАРИАНТ РОЕВОГО УПРАВЛЕНИЯ ГРУППОЙ ДРОНОВВ УСЛОВИЯХ НЕОПРЕДЕЛЕННОСТИ СРЕДЫ ФУНКЦИОНИРОВАНИЯ
Рассмотрим вариант управления группой дронов в условиях неопределенности среды функционирования, на примере ограничений по дальности на устойчивую связь между дронами.
В процессе применения группы дронов возникает ряд ограничений:
-
. каждый аппарат осуществляет взаимодействие лишь с небольшим количеством ближайших к нему аппаратов;
-
. область детектирования, дальность связи и энергозатраты на обмен данными ограничены;
-
. информация, собранная каждым аппаратом, в процессе обмена передается, в том числе его дальним соседям по меш-сети;
-
. каждый аппарат самостоятельно принимает решение на текущей момент времени, опираясь на собранные им и коллективные данные об окружающей среде, полученные от соседних дронов.
-
. по возможности, каждый аппарат запрашивает у своих соседей возможность более эффективного решения задачи, но если таких вариантов нет, то пытается сам решить возникшую задачу.
Из приведенных выше ограничений, в случае коллективного (роевого) управления дронами с целью планировании групповых действий, требуется канал прямого обмена информацией между самими дронами. Именно благодаря наличию такого обмена дроны могут согласовывать и оптимизировать свои действия, направленные на решение общей задачи. В условиях неустойчивой связи именно канал прямого обмена информацией является наиболее уязвимой частью групповой системы. Тогда, например, в случае обнаружения нескольких потерявшихся людей в лесном массиве в зависимости от наличия канала прямого информационного обмена в группе дронов, возможны два сценария:
-
1 ) дрон, обнаруживший потерявшегося человека, сообщает соседним аппаратам его координаты, которые передают эту информацию по цепочке своим соседям, пока она не станет известна всей группе через аналог меш-сети и дальше в центр управления полетами;
-
2 ) дрон, обнаруживший потерявшегося человека, не может сообщить его координаты другим аппаратам группы, при этом, он изменяет траекторию движения по направлению к человеку для подтверждения личности потерявшегося. Другие дроны продолжают индивидуальный поиск других людей из потерявшейся группы, пока обнаружат человека сами, либо обнаружат изменение в поведении соседа.
Оба сценария относятся к варианту децентрализованного управления дронами. При этом первый сценарий групповой работы дронов относится к варианту коллективного или роевого управления, а второй сценарий относится к варианту стайного или ролевого управления.
Если есть возможность визуального контроля полета ближайшего дрона в группе, помимо прямого радиообмена, и группа дронов способна осуществлять маневр за ведущим дроном (который обнаружил потерявшегося человека), например, по правилам допустимых дистанций, такой вариант управления можно тоже отнести к роевому, т.к. обмен информацией между аппаратами в группе все равно осуществляется.
Учитывая, что в реальной ситуации, когда потеря связи носит непостоянный характер, и существуют пространства для нормального радиообмена, целесообразным был бы вариант комбинирования роевого и стайного управления с элементами самоорганизации путем совмещения преимуществ каждого метода. На рисунке 3 представлен вариант классификации децентрализованного управления.
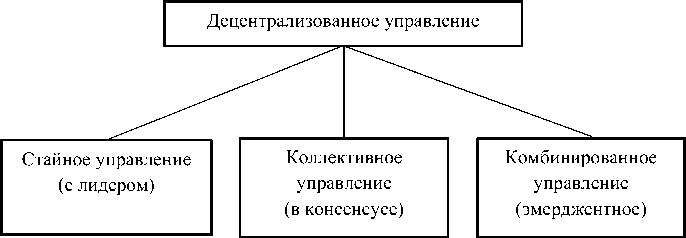
Рисунок 3 . Классификация децентрализованного управления.
Комбинированный децентрализованный вариант управления при реализации требует единого программно-методического обеспечения, размещаемого на общей цифровой платформе с возможность масштабирования группы и состава дронов, а также перепланирования миссии каждого дрона в реальном масштабе времени, используя только ресурсы и информацию, полученную от дрона.
ВЫБОР ТЕХНОЛОГИЙ ИСКУССТВЕННОГО ИНТЕЛЛЕКТАДЛЯ РЕАЛИЗАЦИИ ПРЕДЛАГАЕМОЙ МОДЕЛИ РОЕВОГО УПРАВЛЕНИЯ
В качестве технологий искусственного интеллекта для реализации предлагаемой модели роевого управления предлагается рассмотреть следующие:
-
. онтологии и базы знаний для формализованного представления знаний предметной области, необходимых для принятия согласованных решений в групповой системе дронов;
-
. мультиагентные технологии для адаптивного распределения задач, планирования и оптимизации ресурсов, мониторинга и контроля исполнения планов и достижения результатов интеллектуальной группировкой дронов каждого типа в реальном времени;
-
. принципы сетецентрического взаимодействия для обеспечения горизонтально-вертикальных взаимодействий с другими дронами в группе и между группировками, с использованием меш-подобных сетей связи.
Указанные технологии прошли значительный этап развития от идей – до первых промышленных внедрений [9-11] и позволяют сделать шаг в область автономного (безлюдного) управления большеразмерными группировками дронов с искусственным интеллектом.
Преимущества такого рода систем будут связаны с возможностью решения экстремально сложных и масштабных задач, обеспечивая при этом высокую оперативность, гибкость и эффективность в использовании ресурсов группировки дронов, а также рост производительности и масштабируемости, надежности и живучести при выполнении заданных миссий.
Таким образом, перспективным является развитие подходов в создании моделей, методов и алгоритмов группового управления дронами на базе онтологически настраиваемой мультиагентной технологии с использованием меш-сетей связи.
Возможные применения разработанных моделей и методов могут быть связаны с доставкой грузов группировками дронов в городской среде, поиском объектов в труднодоступной местности, патрулированием магистральных трубопроводов и территорий нефтяных предприятий, защитой объектов критической инфраструктуры или территорий промышленных предприятий и т.д.
ЗАКЛЮЧЕНИЕ
Новые модели и методы роевого управления группой дронов становятся в последнее время все более актуальными в условиях применения в среде с априорной неопределенностью, высокой динамикой и противодействием. Данный класс моделей и методов стремительно развивается во всем мире благодаря быстрому техническому прогрессу и появлению автономных дронов с искусственным интеллектом на борту.
В настоящей статье показана складывающаяся тенденция перехода от жестких моделей централизованного иерархического управления, использующих простейшие дроны – к более сложным децентрализованным и распределенным моделям и методам управления, построенным на природоподобных принципах самоорганизации и эволюции, присущих колониям муравьев, рою пчел, стаям рыб и т.д. Широкий класс такого рода моделей в литературе часто называют общим термином «роевые», но на самом деле под этим термином скрывается целый ряд совершенно различных моделей и методов, что требует уточнения известной в литературе классификации. Представлена классифика- ция перспективных моделей и методов коллективного интеллекта, эволюционирующих в направлении эмерджентного интеллекта – коллективного искусственного интеллекта, возникающего в открытых самоорганизующихся системах, отличающихся принятием согласованных решений в консенсусе.
Обоснован выбор применения принципов сетецентрического управления, онтологий и муль-тиагентных технологий для создания нового поколения интеллектуальных систем роевого управления группами дронов с коллективным интеллектом и показаны их преимущества при решении сложных задач в различных областях применения.
