Моделирование автоматизированной системы охлаждения испытательного стенда для агрегата управления АУ-38б

Автор: Кузьмин К.А.
Журнал: Теория и практика современной науки @modern-j
Статья в выпуске: 12-1 (18), 2016 года.
Бесплатный доступ
Статья посвящена разработке имитационной модели автоматизированной системы охлаждения испытательного стенда в среде динамического программирования VisSim. Приведен эксперимент. Проведена идентификация объекта управления и разработана модель автоматизированной системы охлаждения стенда
Испытательный стенд, имитационная модель, идентификация, автоматизированная система управления
Короткий адрес: https://sciup.org/140267822
IDR: 140267822
Текст научной статьи Моделирование автоматизированной системы охлаждения испытательного стенда для агрегата управления АУ-38б
The article is devoted to the development of a simulation model of automated test stand cooling system in dynamic programming Wednesday VisSim. Is an experiment. Identification of object management and developed a model automated system cooling stand
Для реализации методов имитационного моделирования использована среда динамического программирования VisSim. Некоторые возможности среды VisSim для имитационного моделирования автоматизированных систем управления технологическими процессами были раскрыты в работах [1, 2, 3, 4, 5].
Агрегат управления АУ-38Б является гидравлическим и входит в систему автоматической регулировки воздухозаборника (АРВ-39Д), предназначенную для автоматического регулирования положения клина воздухозаборника основного изделия. Агрегат управления регулирует расход рабочей жидкости, поступающей от гидросистемы основного изделия к гидроцилиндру управления клином воздухозаборника изделия.
С целью обеспечения эффективности тяги и надёжной работы двигателя на всех режимах полёта самолёта и на всех режимах работы двигателя необходимо проводить систематические испытания и капитальный ремонт агрегата управления АУ-38Б. Для этой цели применяется испытательный стенд.
При работе стенда происходит непрерывное выделение теплоты, приводящее к резкому повышению температуры. Для поддержания температуры рабочей жидкости в АУ-38Б в пределах 70…80°С, требуемых по условиям испытаний «Руководства на капитальный ремонт агрегата управления АУ-38Б» необходима система охлаждения.
Механизмы тепловыделения и теплопередачи различны, обладают перекрёстными связями, и сложны для математического описания. Поэтому, параметры передаточной функции объекта управления (агрегата АУ-38Б) теоретически рассчитать сложно и в данной работе используется экспериментальный метод идентификации.
На рисунке 1 представлена структурная схема системы управления. Объект имеет две входные переменные и одну выходную.
Входные переменные:
-
- расход рабочей жидкости, который задаётся алгоритмом (программой);
-
- задатчик температуры, установленный в терморегуряторе ТРМ -12.
Выходная, управляемая переменная
– температура рабочей жидкости (масла 7-50С-3) агрегата.
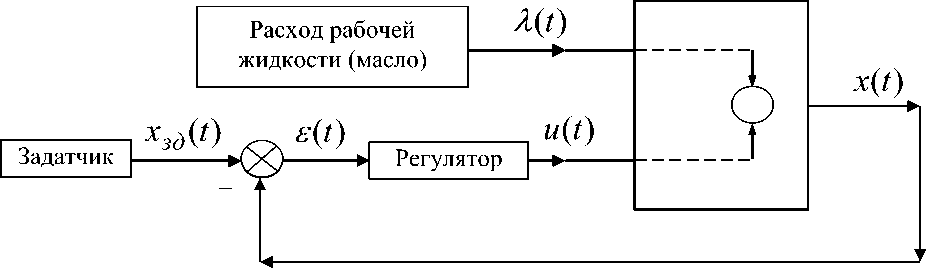
Рис. 1- Структурная схема автоматизированной системы охлаждения испытательного стенда
С целью определения переходных характеристик объекта управления проведен эксперимент, состоящий из двух этапов:
Этап I. При отключенной системе охлаждения был установлен расход рабочей жидкости Q=8,0 л/мин. Температура рабочей жидкости и самого агрегата возрастала от начальной t 0 =200С до максимально разрешённой ТУ t макс =800С за время 7 мин. Измерение температуры проводилось через каждые 60 сек. Экспериментальные данные представлены в таблице 1.
Таблица 1.
|
Время мин. |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Расход л/мин. |
8 |
8 |
8 |
8 |
8 |
8 |
8 |
8 |
|
Температура 0С |
20 |
34 |
50 |
63 |
70 |
75 |
78 |
79 |
Эти данные позволяют сделать вывод, что объект управления по каналу – расход рабочей жидкости - температура можно представить в виде двух апериодических звеньев, соединённых последовательно.
Параметры этих звеньев определены методом сканирования, используя критерий оптимальности наименьших квадратов.
Таким образом, математическая модель объект управления по каналу управления - расход рабочей жидкости – температура, можно представить в виде передаточной функции:
W i (s)=(600*780/40s +1)*(1/120s+1)
Результаты идентификации и график переходного процесса показаны на рисунке 2.
Полученный теоретически график переходного процесса и экспериментальные данные совпадают с достаточно высокой точностью.
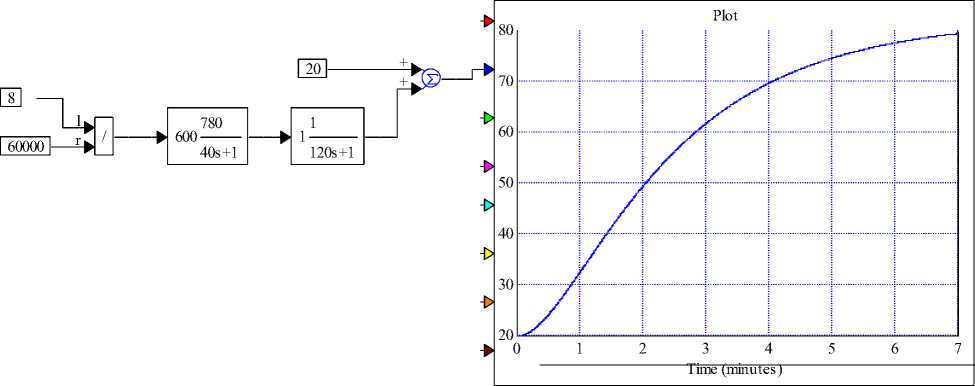
Рис. 2 - Идентификация объекта управления по экспериментальному графику переходного процесса без системы охлаждения. Расход рабочей жидкости 8 л/мин.
Этап II. Определение передаточной функции объекта управления по каналу управления температурой:
Расход рабочей жидкости установлен 20 л/мин. Через 2 минуты была включена подача охлаждающей жидкости (в этот момент времени температура в объекте достигала значения 950С). Расход охлаждающей жидкости составлял 0,5м3/ч. Полученные экспериментальные данные процесса охлаждения - зависимости температуры от времени представлены в таблице 2.
Таблица 2.
|
Время, мин. |
2 |
3 |
4 |
5 |
|
Расход, л |
0,5 |
0,5 |
0,5 |
0,5 |
|
Температура 0С |
95 |
77 |
64 |
65 |
По каналу управления температурой объект управления на основании полученных экспериментальных данных можно представить передаточной функцией вида:\
W 2 (s)=(20*35/24s+1)*(1/50s+1)
На рисунке 3. приводятся результаты идентификации.
Полная передаточная функция объекта управления с двумя входными переменными равна сумме полученных передаточных функций:
W(s) = W i (s)+ W 2 (s)
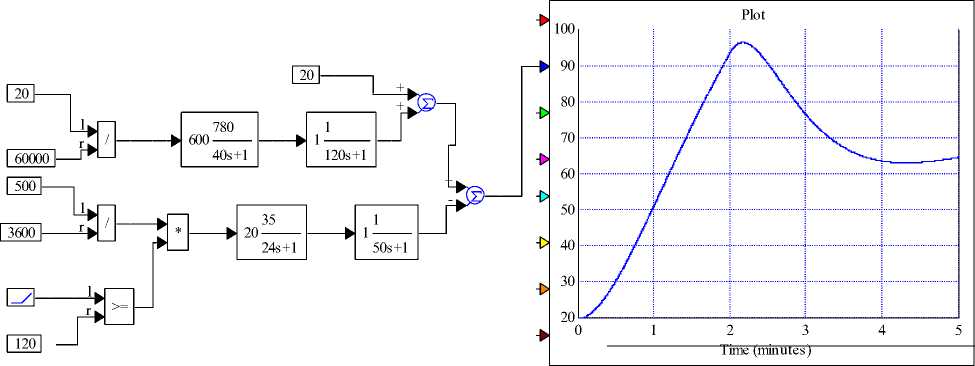
Рис. 3 - Идентификация объекта управления по экспериментальному графику переходного процесса с системой охлаждения. Расход рабочей жидкости 20 л/ мин.
По результатам эксперимента разработана математическая модель системы автоматизированного управления охлаждающей жидкости испытательного стенда.
Согласно технологической карте испытаний в таблице 3, приводятся данные изменения расхода рабочей жидкости как функция времени. Управление расходом жидкости производится при помощи управляющего тока в электрической обмотке преобразователя сигналов.
Таблица 3.
|
Время мин. |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
Расход л. |
8 |
8 |
8 |
8 |
8 |
32 |
54 |
68 |
10 |
35 |
56 |
70 |
|
Сила тока мА |
10 |
10 |
10 |
10 |
10 |
30 |
50 |
70 |
10 |
30 |
50 |
70 |
Данный алгоритм разработан с помощью стандартных блоков в среде VisSim и представлен на рисунке 4.
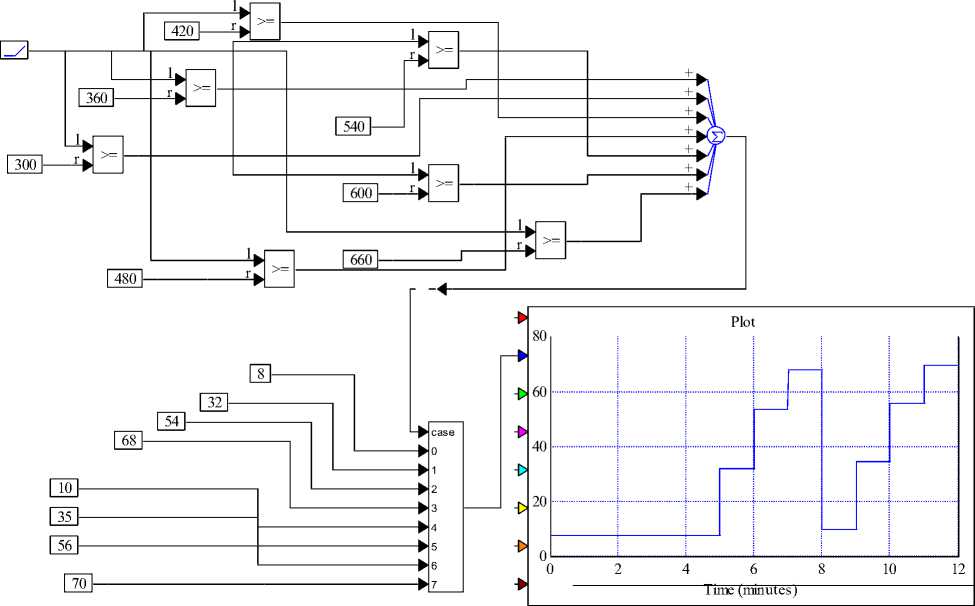
Рис. 4 - Алгоритм управления расходом рабочей жидкости в агрегате А У-
38Б.
Разработанная система управления температурой агрегата АУ-38Б представлена на рис 5. Блок PROG R представляет собой задатчик расхода рабочей жидкости (алгоритм расхода).
На рисунке 5:
-
1 - график расхода рабочей жидкости,
-
2 - график зависимости расхода от температуры и времени.
-
3 – эпюра команд управления гидроклапаном.
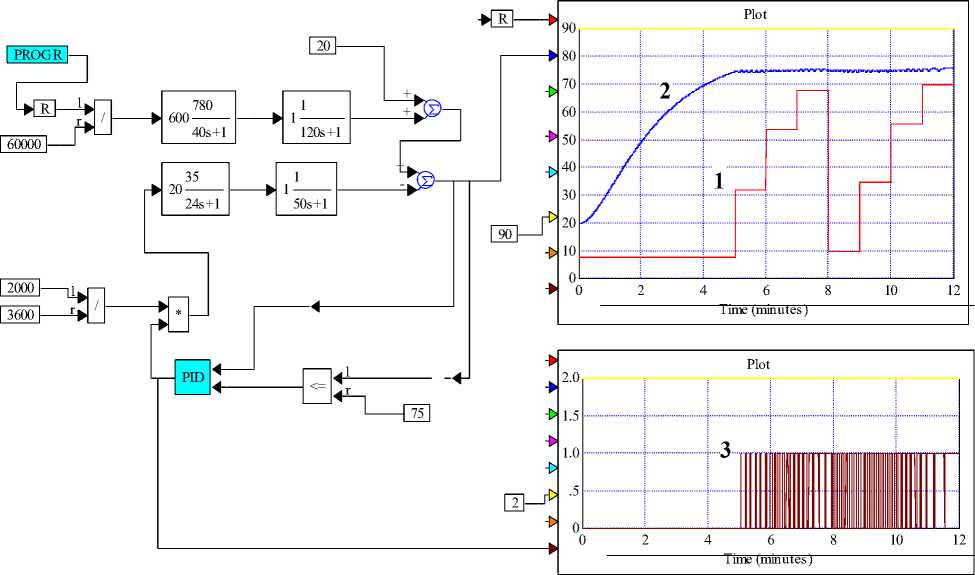
Рис. 5 - Система управления температурой агрегата А У-38Б при наличии двух входных переменных: расхода рабочей жидкости и канала управления температурой агрегата.
В системе управления используются два датчика температуры рабочей жидкости. С первого датчика (контур отрицательной обратной связи) преобразованный сигнал поступает на сравнивающее устройство терморегулятора ТРМ-12. С помощью второго датчика происходит включение контура управления температурой при достижении температуры рабочей жидкости 700С. т.е включается система охлаждения. Регулятор производит стабилизацию температуры в окрестности 750С с допуском ± 40С , что соответствует техническим условиям.
Параметра ПИД- регулятора в ТРМ-12 настраиваются автоматически. Выходной сигнал с регулятора ТРМ-12 после усиления управляет открытием и закрытием гидроклапаном КЗР. Команды управления клапаном показаны на рис.6. Анализ представленных эпюр показывает, что при большом выделении количества теплоты клапан КЗР находится в открытом состоянии.
Интервал времени больше по сравнению с интервалом времени, когда выделяется меньшее количество теплоты, т.е. система охлаждения «справляется» с возложенной на неё функцией охлаждения.
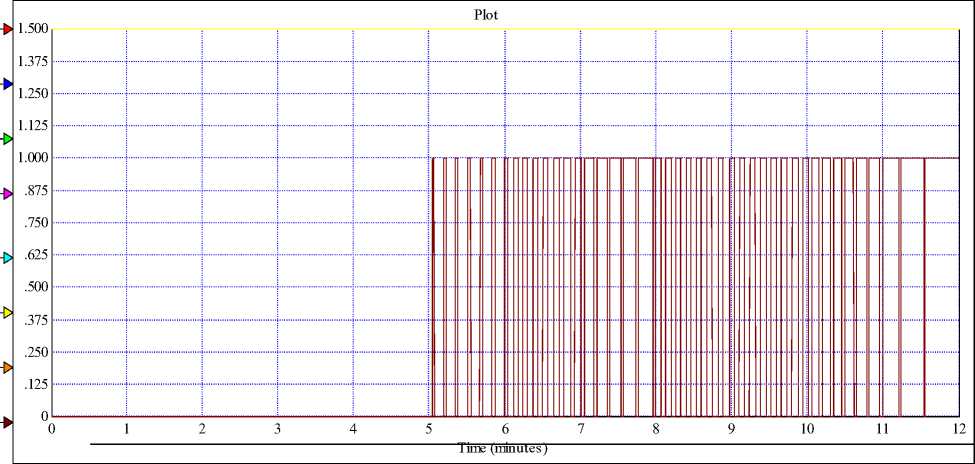
Рис. 6- Эпюра сигнала управления электромагнитным клапаном охлаждающей жидкости
Так как, в системе управления исполнительным механизмом и регулирующим органом является клапанный элемент, работающий в режиме «открыто»- «закрыто», то система управления является устойчивой.
Представленная имитационная модель системы управления параметрами испытательного стенда является открытой, позволяет исследовать технологический процесс, не прибегая к экспериментальным натурным наблюдениям. Предлагаемые решения можно использовать при проектировании систем автоматического управления аналогичными объектами.
Список литературы Моделирование автоматизированной системы охлаждения испытательного стенда для агрегата управления АУ-38б
- Грыжов В.К., Корольков В.Г. Модель преобразователя для проектирования гибридных систем управления в среде VisSim // Москва: Автоматизация в промышленности. 2010. № 7.
- Грыжов В.К., Корольков В.Г., Грыжов Е.В., Акшинский А.Д. Гибкий преобразователь аналогового сигнала в дискретный цифровой на примере вольтметра двойного интегрирования // Москва: Автоматизация в промышленности. 2012, № 8.
- Корольков В.Г., Грыжов В.К., Грыжов Е.В. Гибкий преобразователь аналогового сигнала в дискретный цифровой на примере вольтметра следящего уравновешивания // Москва: Автоматизация в промышленности. 2013, № 7.
- Грыжов В.К., Кузьмин К.А., Грыжов Е.В. Имитационная модель системы программного управления технологическими процессами в среде VisSim. // Материалы XVI международной научно- практической конференции. Сборник научных трудов, № 3(15), Новосибирск, 2014 г.
- Грыжов В.К., Корольков В.Г., Грыжов Е.В. Имитационная модель системы управления температурой в генераторе льда. // Материалы XXXVI-XXXVII международной научно- практической конференции. Сборник научных трудов, №11-12, Новосибирск, 2015 г.
