Моделирование автоматизированных информационных систем на основе вероятностных автоматов с блокировкой обслуживания

Автор: Белоусов Вадим Евгеньевич, Дорофеев Дмитрий Валериевич, Можарова Лина Александровна
Рубрика: Информатика и вычислительная техника
Статья в выпуске: 4 т.22, 2022 года.
Бесплатный доступ
В данной работе формулируется задача применения вероятностных автоматов с блокировкой для исследования сложных гибридных информационных систем. Действительно, в большинстве задач приходится иметь дело с влиянием различных случайных факторов, к которым можно отнести ненадежные элементы электронного оборудования, периодически выходящие из строя, случайные реакции лиц, принимающих решения, вероятностные колебания длительности выполнения различных этапов работ, составляющих исследуемый процесс. Цель исследования заключается в необходимости повышения эффективности управления автоматизированными информационными системами на основе моделей имитационного обслуживания с блокировкой. Материалы и методы. Рассмотрим основные принципы, положенные в основу метода вероятностно-автоматного моделирования. Метод базируется на теории автоматов, заключающейся в использовании результатов машинного эксперимента при создании сложных самоорганизующихся информационных систем, а также в системах автоматизации производственных процессов. Вероятностно-автоматная модель информационной системы представляет собой не что иное как агрегативную модель при раздроблении системы на самые мелкие одномерные агрегаты. Основными понятиями автоматного моделирования являются вероятностный автомат и система вероятностных автоматов. Результаты. В результате исследования получены таблицы условных функциональных переходов и на ее основе проанализированы автоматы с блокировкой обслуживания. Доказана их эффективность для автоматизированной информационной системы сложной структуры. Заключение. Работа системы заключается в выборе совокупности регулируемых параметров или совокупности испытываемых вариантов. Для этого принимают решение, по какому показателю целесообразно судить об эффективности работы информационной системы. После этого решается вопрос о том, за счет какого изменения режима работы системы, ее структуры или значений параметров можно добиться максимальной эффективности. Речь идет о выборе совокупности регулируемых параметров или совокупности испытываемых вариантов. Показатель эффективности работы системы является детерминированной функцией регулируемых параметров. Эта функция называется целевой или критерием эффективности системы. Далее, из заданного множества значений совокупности регулируемых параметров выбрать такую совокупность этих значений, при которой целевая функция принимает минимальное (максимальное) значение.
Автомат, агрегаты, знания, модели, имитация, система, состояние, параметры, управление
Короткий адрес: https://sciup.org/147239447
IDR: 147239447 | УДК: 62.519 | DOI: 10.14529/ctcr220403
Application of methods of information engineering for change of structure of multilayer systems of organizational management
In this work the task is formulated and the method of reconfiguration of systems of organizational management on the basis of synthesis of the functional structure having an impact on an appearance of all system considerably defining an order of its functioning, integrating in a whole of means of technical and mathematical, program and information support is offered. The research objective consists in need of increase in effective management of organizational systems on the basis of complex development, implementation and application of funds of automated management of its elements. Expert systems on the basis of declarative programming languages are applied to synthesis of similar structures. Materials and methods. As the tool for definition of the knowledge base about the field of restructuring of structure of management calculation of expressions and language of a predicate logic, that is a logic theory of first order is used. Then, the problem of reconfiguration of hierarchical structure of management system can be presented doubly. First, as a problem of definition of the changes of the known rational hierarchical structure providing minimum loss from the arisen functional failures. Secondly, as a problem of creation of new rational structure which provides optimum use of the resources used in the course of achievement of definite purposes in the changing conditions. Results. As a result of a research, on the basis of de Morgan's law the factors influencing a system status of organizational management in general are defined. The necessary structure of solvable tasks of all hierarchical structure is defined by extent of influence of different factors on characteristics of structure of management. Conclusion. The operation of the system is to select a set of adjustable parameters or a set of tested options. To do this, a decision is made on what indicator it is advisable to judge the effectiveness of the information system. After that, the question of how to change the operating mode of the system, its structure or parameter values can achieve maximum efficiency is resolved. It is about choosing a set of adjustable parameters or a set of tested options. The system performance indicator is a deterministic function of the controlled parameters. This function is called the target or performance criterion of the system. Further, from a predetermined set of values of the set of adjustable parameters, select such a set of these values, at which the objective function takes the minimum (maximum) value.
Текст научной статьи Моделирование автоматизированных информационных систем на основе вероятностных автоматов с блокировкой обслуживания
В.Е. Белоусов, , Д.В. Дорофеев, А. Можарова,
V.E. Belousov, , Dorofeev, Mozharova,
Информационные системы, подлежащие исследованию, весьма разнообразны по своей структуре, сложности, конкретному назначению и обладают большим разнообразием. Однако если отвлечься от конкретного производственного смысла процессов, протекающих в системах и их отдельных узлах, то логические и вычислительные правила функционирования элементов систем будут не столь разнообразны. Во многих случаях, казалось бы, совсем разные «по конкретному смыслу» элементы функционируют на основании одних и тех же законов. Это дает возможность при построении автоматных моделей сложных систем выделить определенное, сравнительно небольшое количество стандартизированных автоматов (вероятностных и детер- минированных), так что построение моделей довольно широкого класса систем оказывается возможным лишь с помощью определенного набора автоматов этих типов [1].
Постановка задачи автоматной интерпретации
Разберем различные способы автоматной интерпретации моделей различных узлов информационных систем. При этом некоторые узлы будут имитироваться в виде отдельных автоматов, другие – с помощью небольших вероятностно-автоматных систем. Предварительное изучение отдельных свойств типовых узлов информационных систем дает возможность перейти в дальнейшем к описанию построения моделей довольно сложных систем. Одним из наиболее характерных свойств информационных систем является поступление на вход системы некоторых транзакций, которые в каждом отдельном случае могут иметь различный конкретный смысл. Как известно, правила формирования входящих потоков могут быть довольно разнообразными [2].
На практике активные и пассивные задержки транзакций внутри информационных систем в процессе их функционирования, как правило, сопровождаются влиянием различных специфических особенностей: блокировки, резервирования и др. Рассмотрим описание моделей ряда систем, обладающих такими особенностями. Попутно коснемся построения индикаторов, служащих для определения различных неслучайных характеристик моделей. Постараемся отразить две сходные особенности системы: блокировку на обслуживающий механизм и на поступление тран-зактов. Разберем случай, когда транзакты, поступившие в систему и заставшие обслуживающий механизм занятым, не покидают ее, а задерживаются, образуя очередь. Пусть промежутки времени между моментами поступления последовательных транзактов – взаимно независимые одинаково распределенные случайные величины, реализации которых можно рассматривать как реализации некоторой случайной величины ^. Сделаем такое же предположение и относительно длительностей обслуживания, считая их реализациями случайной величины п. Очередь предполагается неограниченной [3].
Для того чтобы полностью охарактеризовать систему в каждый момент времени, необходимо задание трех ее временных характеристик. Они могут быть выбраны, например, следующим образом: 1) промежуток времени от момента t до момента поступления очередного тран-закта; 2) промежуток времени от момента t до момента окончания обслуживания того транзак-та, который обслуживается в момент t; 3) количество транзактов, ожидающих в очереди, в момент времени t.
Эти три характеристики, очевидно, образуют Марковский вектор системы [4], следовательно, автоматную модель системы можно построить из трех автоматов Лъ Л2 и Л3, состояния которых отождествим соответственно с тремя этими временными характеристиками. Будем считать, что при значении выходного сигнала %l(t) автомата Al, равном 1, через одну единицу времени (в момент t + 1) поступит очередной транзакт. Далее, х2 (t) = 1 лишь в том случае, если обслуживающий механизм свободен в момент t или освободится к моменту времени t + 1. Выходной сигнал х3 (t) равен 1, если в момент t в очереди имеются транзакты.
На основании такого выбора состояния автоматов и значений выходных сигналов систему функций выходов [5] можно представить в виде табл. 1.
Таблица 1
Система функций выходов
Table 1
System of functions of outputs
|
1 |
|
|
X i( t) |
Gl(t) < 1 |
|
X 2( t) |
^(t) < 1 |
|
* 3(0 |
a3 ( t) > 0 |
Структурный граф модели изображен на рисунке.
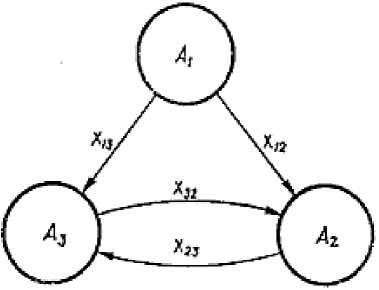
Структурный граф модели
Network diagram of execution of rules of expert system
Матрица а л ф а в итов [ 6] име е т в и д , представленный в табл. 2.
Таблица 2
Матрица алфавитов
Table 2
Matrix of alphabets
|
P |
Д |
Д |
|
Θ |
Н |
Д |
|
Θ |
Д |
Н |
Таб ли ц а у с лов н ых фу н к ц и он а лов п е ре ходов ( Т УФП) , устанавливающая соответствие между в ы с к а зыв а н и ями и фу н к ц и он а ла ми , представлена в следующем виде (табл. 3).
Таблица 3
Таблица условных функционалов переходов
Table 3
Table of conditional functionalities of transitions
|
Л 1 |
a1(t) > 1 |
a1(t) < 1 |
|
|
Я 1 (t) — 1 |
5 |
||
|
^ 2 |
« 2 (t) > 1 |
a2 (t) < 1Л x1 (t) + %3 (t) > 0 |
a2(t) < 1 A%1(t) + %2(t) = 0 |
|
a 2 (t) — 1 |
n |
0 |
|
|
^ 2 |
U1 (t) + %(t) |
||
В к а чес тв е век тора началь ных состояний можно выбрать любые три чи с л а , из к оторы х п е рвое – п о лож и тельн ое ц е л ое , а в торое и тре ть е – натуральные. Исключение представляют лишь так и е три чи с ла, г д е п ри п рои звольном первом второе равно нулю, а третье отли чн о от н у ля. С мысл так ого иск л ю че н ия в п олне ясен: когда в очереди имеются клиенты, об с лу жи в а ющ и й м ех а н изм н е мож е т п рос т а и в а ть [7] .
Поск оль к у в раб оте ра с смотре н ной системы участвуют две независимые случайные величины f и р , т о за да н и е с и с те м ы р аспределений случайных величин может осу щ ес тв лятьс я с п ос обо м блок и р ов к и. Из в с е х в озм ожн ых с п ос о б ов б л ок и ро в к и в ыб е ре м два.
Задание системы распределений случайных величин способом блокировки
Блок ировк а входя ще го по тока т ран зак тов . В каждый момент времени t входящий поток, на кот оры й н е д е й с тв у е т б л ок и ровка, может быть заблокирован в течение проме жу тк а в ре м е н и случайной длительности у с в е роятн ос тью р (0 < р < 1) или не заблокирован с противоположной в ероя тн ос тью. Д ля оп реде ле н н ос ти об озн а чи м че р е з т двоичную случайную величину с распределением [1-р, р}. В моме н т о кончания действия блокировки на вход посту п а е т оч е ре д н ой к лиен т, и да л е е с ис те ма п ро должае т фу н к ц и он и ров ать нормально [8].
Блок ировк а об с лужив ающ его м ех ани зм а . Блокировка (выход из строя) происходит после отр а б отк и об с лу жи в аю щ им ме ха н и змом с лу ча й н о го к о ли че с тв а в рабочих единиц времени [9].
Время простоя в эту величину не входит. После выхода механизма из строя в течение случайного времени а происходит его восстановление (ремонт). Далее продолжается обслуживание транзакта, прерванное в момент выхода механизма из строя.
Найдем математическое ожидание промежутка простоя обслуживающего механизма при отсутствии блокировки (в исправном состоянии). Заметим, что ввиду возможности выхода из строя механизма только в рабочем состоянии каждый из таких промежутков будет заканчиваться лишь при поступлении новых транзактов в систему, но не при прекращении действия блокировки обслуживающего механизма.
Основная часть модели состоит из шести автоматов [10], которые обозначим Лъ Л2,..., Л6. Автоматы индикатора (их три) обозначим буквой U с соответствующим индексом. Как всегда, построение модели начнем с определения конкретного смысла состояний автоматов.
Положим: а4 (t) - промежуток времени, оставшийся в момент времени t до момента поступления очередного транзакта; а2 (t) - промежуток времени, оставшийся от момента t до момента окончания обслуживания очередного транзакта, если в момент t имеется некоторый транзакт, поступивший на обслуживание, независимо от того, является обслуживающий механизм в данный момент исправным или нет, в противном случае a2(t) = 0; а3 (t) - количество транзактов, ожидающих обслуживания в момент времени t; n4(t) - промежуток времени, оставшийся от момента t до момента окончания блокировки входящего потока, если в этот момент действует блокировка, в противном случае a4(t) = 0; as(t) - значение качественной компоненты блокировки обслуживающего механизма в момент времени t, если в этот момент действует блокировка, то a5(t) = 1, в противном случае a g (t) = 0; a6(t) - значение количественной компоненты блокировки обслуживающего механизма в момент времени t, т. е. промежуток времени от момента t до момента очередной смены качественного состояния блокировки механизма; иг (t) - накопленное за промежуток времени от начала функционирования модели до момента t суммарное время простоя обслуживающего механизма в исправном состоянии; u2(t) - накопленное за этот же промежуток времени суммарное количество промежутков незанятости обслуживающего механизма; u3 (t) - приближенное значение математического ожидания длительности простоя обслуживающего механизма в исправном состоянии, полученное путем усреднения по промежутку времени (0, t — 1).
Такое задание состояний автоматов дополним следующими замечаниями.
-
1. Ввиду того, что по принятому условию задачи в момент окончания действия блокировки на входящий поток на вход системы всегда поступает транзакт, при наличии этой блокировки промежуток времени до поступления очередного транзакта определяется состоянием автомата Л4, а не состоянием автомата Л4 последнее в рассматриваемом случае теряет смысл и может быть выбрано произвольно [11, с. 203–211].
-
2. Поскольку по условию задачи предполагается, что в каждый момент времени, когда на входящий поток не действует блокировка, последняя может наступить с одинаковой вероятностью, для описания этой блокировки достаточно выбрать лишь одну временную характеристику. Действительно, эту характеристику можно задать так: в момент действия блокировки она совпадает со значением промежутка времени, оставшегося до окончания действия блокировки, в противном случае равна нулю [12]. В качестве этой компоненты в модели фигурирует состояние автомата Л4. С блокировкой обслуживающего механизма дело обстоит совершенно иначе. Состояние блокировки и состояние ее отсутствия наступают или не наступают в зависимости от того, сколько времени прошло с момента наступления или окончания блокировки, поэтому для полного описания блокировки обслуживающего механизма необходимо ввести две временные характеристики: качественную и количественную, как это сделано в рассматриваемой модели путем добавления автоматов Л5 и Л6.
-
3. В каждый момент времени обслуживающий механизм может находиться, будучи исправным [13], либо в рабочем состоянии, либо в состоянии простоя, либо быть в неисправном (заблокированном) состоянии. Нас интересуют лишь промежутки времени простоя обслуживающего механизма в исправном состоянии. Такие промежутки могут иметь произвольную целочисленную длительность. В процессе функционирования модели автомат UT является накопителем количества единиц времени, когда обслуживающий механизм простаивал в исправном состоянии, а автомат U2 - числа промежутков времени непрерывного нахождения механизма в этом состоянии.
Из условия задачи пока не ясно, как должен действовать транзакт, который прибыл в момент, когда обслуживающий механизм был заблокирован и в системе не было ни одного транзакта (в том числе частично обслуженного), т. е. должен ли он находиться в очереди до прекращения действия блокировки или поступить к обслуживающему механизму и продолжать ожидание там. С точки зрения содержания эти два случая неразличимы, так как безразлично, где происходит пассивная задержка [14]. Однако с точки зрения алгоритмического описания модели здесь имеется существенная разница, например для определения состояний автоматов Л2 и Л3. Следовательно, при построении модели необходимо принять одну их этих версий за истину. Будем придерживаться того мнения, что в указанном случае ожидание происходит непосредственно в обслуживающем приборе, а не в очереди [15].
Обозначим выходные сигналы автоматов Лъ Л2,..., Л6 буквой х с индексом, соответствующим номеру автомата, и указанием на момент времени. Выходные сигналы автоматов индикатора обозначим так же, как внутренние состояния этих автоматов.
Пусть x1(t) - сигнал, принимающий значение 1 в момент, предшествующий поступлению транзакта на вход системы вследствие естественного течения входящего потока (а не вследствие прекращения блокировки этого потока), и значение 0 - в противном случае; х2 (t) - сигнал, равный 0, когда в момент t обслуживающий механизм свободен, 1, когда он занят, но освободится через единицу времени, и 2 - в остальных случаях; х3 (t) - сигнал, равный 1 при наличии в очереди хотя бы одного транзакта и 0 - в противном случае; X4(t) - сигнал, равный 0, когда блокировка входящего потока отсутствует, 1, когда действие блокировки через единицу времени закончится, и 2 - в остальных случаях; х5 (t) - сигнал, совпадающий в каждый момент времени с качественной компонентой описания блокировки обслуживающего механизма, т. е. с состоянием автомата Л5; X6(t) - сигнал, принимающий значение 1, если до очередной смены качественной компоненты описания этой блокировки остается точно одна единица времени, и значение 0 – в противном случае.
Построим систему функции выходов для двоичных сигналов (табл. 4).
Таблица 4
Система функции выходов для двоичных сигналов Table 4 The system of function of outputs for binary signals
|
1 |
|
|
X i (t) |
ai(t) = 1 |
|
X 3 (t) |
a3 ( t) > 0 |
|
x s (t) |
«sCO = 1 |
|
X 6 (t) |
«6 to = 1 |
Для автоматов индикатора функции выходов уже определены путем принятия предположения об их тождественности состояниям соответствующих автоматов. Для упрощения записи ТУФП введем промежуточные величины: y1(t) - величина, равная 1, если в момент времени t + 1 должен поступить транзакт за счет прекращения действия блокировки, и равная 0 - в противном случае; y2(t) - величина, равная 1 в том случае, если в момент времени t + 1 обслуживающий механизм способен принять одного транзакта, включая и тот случай, когда действует блокировка этого механизма, и 0 - в остальных случаях; z (t) - суммарное количество транзактов, находящихся в очереди в момент t либо поступающих в систему в этот момент времени в порядке нормального течения входящего потока или ввиду прекращения действия блокировки.
Для вычисления значений промежуточных величин имеем следующие формулы:
|
vt 1 =JO y 2 (t) ={0 |
при X4(t) = 1, при X4(t) ^ 1; при X2(t) = 0 или X2(t) = 1 и X5(t) = 0, при X2(t) = 2 или X2(t) = 1 и X5(t) = 1. () |
Выражение для y2(t), как нетрудно убедиться, можно переписать в более простом виде:
у2® = !0
приx2(t) + x5(t) < 1, при x2 (t) + xq (t) > 2,
или
y2(t) = 1 — max{0, min{1,x2(t) + xq(t) — 1}}.
ТУФП представляется в виде табл. 5:
Таблица 5 ТУФП
Table 5
TUFP
|
А 1 |
«1 > 1 Л x4 = 0 |
«1 > 1Л x4 = 0 V x4 = 1 |
x4 = 2 |
||||
|
«1 — 1 |
5 |
0 |
|||||
|
А 2 |
«2 > 1V «2 = 1Л xq = 1 |
z > 0Л(«2< 1Лxq = = 0V«2 = 0ЛxR = 1) |
z = 0Л(«2< 1Лxq = = 0V«2 = 0ЛxR = 1) |
||||
|
« 2 + x q — 1 |
n |
0 |
|||||
|
А 3 |
max{0, «3 + x1 + у1 — y2} |
||||||
|
А 4 |
«4 > 0 |
«4 = 0 |
|||||
|
« 4 — 1 |
ту |
||||||
|
А 5 |
«q = 0ЛX2 = 0 |
«q = 0 Л x2 > 0 |
« 5 = 1 |
||||
|
0 |
x 6 |
1 — x 6 |
|||||
|
А 6 |
« 6 > 1Л x5 = = 0V«6>1Vxq = = 0Лx2 > 0 |
« 6 > 1Л x5 = = 0 Л x2 = 0 |
« 6 = 1Л x5 = 1 |
« 6 = 1Л x5 = 1 |
|||
|
« 6 — 1 |
« 6 |
в |
a |
||||
|
^ 1 |
u1 + (1 — xq) max{0,1 — x2} |
||||||
|
^ 2 |
z > 0 |
z = 0 |
|||||
|
u2 + max{(0,1 — x2)} (1 — xq) |
« 2 |
||||||
|
^ 3 |
u1: max{1,u2} |
||||||
Рассмотрим полученный вариант подробнее.
Автомат А1. Если в момент t блокировка входящего потока не действует и до поступления очередного транзакта остается промежуток времени, превышающий единицу, то естественно, что состояние автомата за единичный промежуток времени уменьшится на единицу, т. е.
«^t + 1) = «1 (t) — 1 при x4(t) = 0 и «1(t) > 1. (4)
Если в момент t также не было блокировки, но время, оставшееся до поступления транзакта, равно единице, то в следующей момент времени транзакт поступит и до поступления очередного останется случайный промежуток времени, совпадающий с одной из реализаций случайной величины ^.
Совершенно тот же результат будет, если в момент времени t действует блокировка на входящий поток и до окончания ее действия остается одна единица времени (x4(t) = 1) независимо от состояния автомата А1. Если в момент t на входящий поток действует блокировка и до окончания этого действия остается промежуток, превышающий единицу времени, что может случиться тогда и только тогда, когда x4(t) = 2, то на основании сделанного выше замечания состояние автомата А1 можно выбрать произвольно. Это осуществимо при предположении, что «1(t) = 0.
Автомат А2. Что касается изменения состояния этого автомата, то возможны три результата:
-
1) состояние автомата уменьшится на величину, противоположную значению сигнала x5(t), т. е.
«2(t + 1) = «2(t) — (1 — x5(t)) = «2(t) + x5(t) — 1; (5)
-
2) начнется обслуживание очередного транзакта, т. е. в момент t + 1 состояние автомата совпадает с одной из реализаций случайной величины р;
-
3) в момент t + 1 обслуживающий механизм попадет в состояние простоя (будучи исправным или нет), т. e. «2(t + 1) = 0.
Первый из перечисленных результатов возможен в двух случаях: когда до окончания обработки обслуживаемого транзакта остается промежуток, больший одной единицы времени (при наличии или отсутствии блокировки), и когда при наличии блокировки этот промежуток равен единице.
Второй результат имеет место также в двух случаях: когда при отсутствии блокировки остаточное время обслуживания не превышает единицы и в этот момент времени произойдет поступление транзакта, если таковые имеются в очереди (z (t) > 0), а также когда условие z (t) > 0 наличия или поступления клиентов при незанятости обслуживающего прибора (a2(t) = 0) сопровождается информацией о наличии в момент t (x3(t) = 1) действия блокировки нa обслуживающий механизм.
Третий, нулевой, результат имеет место тоже в двух случаях: когда при отсутствии блокировки (x5(t) = 0) и фактической (a2(t) = 0) или ожидающейся (a2(t) = 1) незанятости обслуживающего механизма нет возможных претендентов нa обслуживание (z (t) = 0) и когда незанятость механизма и отсутствие заявок на обслуживание сопровождаются наличием в момент t блокировки механизма.
Автомат Л3. Исходим из основного принципа формирования очереди изложенного выше. В этом случае количество прибываюших транзактов (0 или 1) совпадает со значением суммы x4 (t) + У (t). В момент вpeмeни t из очереди может убыть (для обслуживания) один транзакт или не убыть ни одного. Эту величину обозначим через y2(t).
Таким образом, имеем
а3 (t + 1) = max{0, а3 (t) + xx (t) + у4 (t) - У2 (t)}, (6) когда такое убытие происходит.
Автомат Л4. Если в момент t на входящий поток действует блокировка (a4(t) > 0), то в последующий момент времени t + 1 ее остаточная длительность уменьшится на единицу, в противном случае в момент t + 1 блокировка будет отсутствовать c вероятностью, равной (1 — р), или с вероятностью р начнется новый блокировочный период, причем его остаточная длительность в этом случае совпадет с одной из реализаций случайной величины у. Следовательно, при a4(t) = 0 новое состояние автомата Л4 можно изобразить в виде пpоизведения ту случайных сомножителей т и у.
Автомат Л5. Если в момент t на обслуживающий механизм блокировка не действует (п5 (t) = 0) и этот механизм свободен (х2 (t) = 0), то естественно, что в момент времени t + 1 блокировки также не будет. Если при отсутствии блокировки в момент t и занятости обслуживающего механизма остаточное время безблокировочного периода равно единице (x6(t) = 1), то в момент t + 1 наступит новый период блокирования. Если же при этом остаточное безблокиро-вочное время больше единицы (x6(t) > 1), то блокировка не наступает. В этом случае повое состояние автомата Л5 можно записать так: a5(t + 1) = x6(t).
Если в момент t действует блокировка обслуживания (а5 (t) = 1), то состояние автомата Л5 в момент t + 1 примет значение, противоположное значению сигнала x6(t), т. е. a5(t + 1) = = 1 — X 6 (t).
Автомат А6. Рассмотрим случай, когда состояние автомата не изменяется. Очевидно, что это происходит только тогда, когда в момент t отсутствует блокировка обслуживания (x5(t) = 0), обслуживающий механизм простаивает (x2(t) = 0) и остаточная часть безблокировочного периода больше или равна единице. Следовательно, a6(t + 1) = а6.
В двух остальных случаях состояние автомата может уменьшиться на единицу. Эти случаи такие:
-
1) блокировка обслуживания имеет место (x5(t) = 1) и остаточное время блокировочного периода превышает единицу;
-
2) блокировка не действует (x5 (t) = 0), обслуживающий механизм занят (x2 (t) > 0) и остаточный безблокировочный период превышает единицу.
Если в момент t блокировка механизма имеет место и ее остаточная длительность равна единице, то в следующий момент времени t + 1 наступает безблокировочный период и его остаточная длительность совпадает с одной из реализаций случайной величины а.
При отсутствии блокировки (x5(t) = 0), занятости механизма (x2(t) > 0) и остаточном без- блокировочном времени, равном единице, в момент t + 1 начинается блокировка и ее остаточное время совпадает с реализацией случайной величины а.
Автомат U. На основании определения состояние этого автомата должно увеличиваться на единицу лишь тогда, когда обслуживающий механизм простаивает, не будучи заблокирован, т. е. добавления единицы к uT(t) не происходит, когда действует блокировка (x5(t) = 1) или обслуживающий механизм занят (х2 (t) > 0). Это можно учесть, прибавляя к «старому» состоянию автомата такое выражение, зависящее от х2 и х5, которое равно единице во всех случаях, кроме указанных. Нетрудно увидеть, что именно таким выражением является произведение
-
(1 — х5 (t)) max { 0,1 - Х 2 (t) } . (7)
Автомат U2. По определению состояние этого автомата в момент времени t должно совпадать с количеством промежутков незанятости обслуживающего механизма при отсутствии блокировки. Такие промежутки можно подсчитывать либо по их началам, либо по их концам. Выберем последний способ. Следовательно, функционал для определения u2(t) должен быть составлен так, чтобы он подсчитывал количество переходов обслуживающего механизма из состояния простоя при исправности этого механизма в какое-либо другое состояние. Очевидно, что, если в момент t имеются транзакты, которые либо находятся в очереди, либо поступают в систему извне по той или другой причине, т. е. когда z (t) = 0, интересующий нас переход произойти не может и единица к u2 (t) не прибавляется. В противном случае (z (t) > 0) к u2 (t) единица прибавляется тогда и только тогда, когда механизм простаивает (x2(t) = 0) и блокировки нет (x5(t) = 0). Имеем u2(t + 1) = u2(t) + max{0,1 — x2(t) } (1 — x5(t)). (8)
Автомат U3. Вычислить приближенное значение математического ожидания периода простоя механизма в исправном (незаблокированном) состоянии можно, разделив суммарное время пребывания механизма в этом состоянии за какой-то достаточно большой промежуток времени Г на количество промежутков непрерывного пребывания его в исправном состоянии за тот же период времени Г. Чтобы в начале машинной реализации функционирования модели, когда еще u2(t) = 0, не происходило автоматической остановки при делении на нуль, применяем символ max.
Начальное состояние автоматов индикатора – нулевое. Для остальных автоматов можно выбрать произвольные начальные состояния, соответствующие реально возможной ситуации.
Заключение
Таким образом, схема решения задачи с помощью построенной автоматной модели такова. Прежде всего принимают решение, по какому показателю, в данном случае в свете требований решаемой задачи, целесообразно судить об эффективности работы информационной системы. После этого решается вопрос о том, за счет чего, за счет какого изменения режима работы системы, ее структуры или значений параметров можно добиться максимальной эффективности. Речь идет о выборе совокупности регулируемых параметров или совокупности испытываемых вариантов. Показатель эффективности работы системы является детерминированной функцией регулируемых параметров. Эта функция называется целевой или критерием эффективности системы. Вид целевой функции до начала исследования неизвестен. В противном случае не потребовалось бы применение имитационных методов. Решение любой задачи имитационного моделирования заключается в том, чтобы из заданного множества значений совокупности регулируемых параметров выбрать такую совокупность этих значений, при которой целевая функция принимает минимальное (максимальное) значение.
Список литературы Моделирование автоматизированных информационных систем на основе вероятностных автоматов с блокировкой обслуживания
- Бурков В.Н., Данев Б.К., Еналеев А.К. Большие системы: моделирование организационных механизмов. М.: Наука, 1989. 245 с.
- Бурков В.Н., Кондратьев В.В. Механизмы функционирования организационных систем. М.: Наука, 1981. 301 с.
- Белоусов В.Е., Кончаков С.А. Алгоритм для оперативного определения состояний объектов в многоуровневых технических системах // Экономика и менеджмент систем управления. 2015. № 3-2 (17). C. 227-232.
- Вентцель Е.С. Теория вероятностей. М.: Издат. центр «Академия». 2003. 576 с.
- Белоусов, В.Е., Нгуен Вьет Туан. Алгоритм выбора наилучшего варианта проведения натурного эксперимента в многокритериальных задачах моделирования сложных технических объектов // Системы управления и информационные технологии. 2016. № 1 (63). С. 55-59.
- Моделирование системы оценки компетенций в управлении профессорско-преподавательским составом вуза / С.А. Баркалов, В.Е. Белоусов, Н.Ю. Калинина и др. // XXI Международная конференция по мягким вычислениям и измерениям (SCM'2018). Санкт-Петербург, 23-25 мая 2018 г.: сб. докл.: в 2 т. СПб.: СПбГЭТУ «ЛЭТИ», 2018. Т. 1. С. 355-358.
- Белоусов В.Е., Нижегородов К.И., Соха И.С. Алгоритмы получения упорядоченных правил предпочтения в задачах принятия решений при планировании производственных программ // Управление строительством. 2019. № 1 (14). С. 105-110.
- Баркалов С.А., Бурков В.Н., Порядина В.Л. Механизмы активной экспертизы в задачах комплексного оценивания // Вестник Воронежского государственного технического университета. 2009. Т. 5, № 6. С. 64-66.
- Белоусов В.Е., Баркалов С.А., Нижегородов К.А. Ресурсно-временной анализ в задачах календарного планирования строительных предприятий // Материалы XVI Всероссийской школы-конференции молодых ученых «Управление большими системами». Тамбов: Изд-во ТГТУ, 2019. С. 78-83.
- Jordan M.I. Attractor dynamics and parallelism in a connectionist sequential machine // The Eighth Annual Conference of the Cognitive Science Society. Amherst, MA, 1986. P. 531-546.
- Афанасьев В.Н., Юзбашев М.М. Анализ временных рядов и прогнозирование. М.: Финансы и статистика, 2001. 226 с.
- Губко М.В., Караваев А.П. Согласование интересов в матричных структурах управления // Автоматика и телемеханика. 2001. № 10. С. 132-146.
- Горелик А.Л., Скрипкин В.А. Методы распознавания. М.: Высшая школа, 2004. 341 с.
- Вапник В.Н. Восстановление зависимости по эмпирическим данным. М.: Наука, 1979. 295 с.
- Hart O.D., Holmstrom B. Theory of contracts // Advances in economic theory. 5th world congress. Cambridge: Cambridge Univ. Press, 1987. P. 71-155.
