Моделирование деформирования плоских конструкций со сложными криволинейными структурами армирования

Автор: Федорова Наталья Александровна
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 3 (36), 2011 года.
Бесплатный доступ
Для определения предельных деформаций плоских конструкций с криволинейными траекториями армирования в рамках плоской задачи получены разрешающие уравнения для линейной ортотропной неоднородной задачи упругости. Многообразие структур армирования на базе ортогональных систем координат достигается построением изогональных траекторий к данным координатным линиям.
Армирование, структурная модель, изогональные траектории
Короткий адрес: https://sciup.org/148176627
IDR: 148176627 | УДК: 539.3+539.4
Simulating the plane aircraft constructions deformation with complex curvilinear reinforcement structures
For determining of limitary deformations for planar constructions reinforced with curvelinear trajectories the resolving equations are obtained for orthotropic non-homogeneous linear elasticity problem. A variety of orthogonal systems - oriented reinforcement structures is obtained by isogonal trajectories designing for current coordinate lines.
Текст научной статьи Моделирование деформирования плоских конструкций со сложными криволинейными структурами армирования
Для безопасной работы конструкций с концентраторами напряжений, в окрестности которых возникают большие градиенты полей напряжений, что часто встречается в авиационных конструкциях, их армируют высокопрочными волокнами с целью воспри- ятия волокнами этих градиентов. Но волокна могут и не выполнить эту роль, тогда нагрузка будет влиять на связующее. До последнего времени армирование плоских конструкций осуществлялось прямолинейными волокнами. Однако такая структура армирова- ния может быть эффективной лишь в частных случаях нагружения, при которых внутренние силовые потоки преимущественно направлены вдоль траекторий армирования. Реальные конструктивные элементы работают в более сложных условиях нагружения. Для таких конструкций нужно вводить специальные структуры армирования, которые в определенной мере были бы согласованы с характером полей градиентов напряжений, проводить поиск структур армирования, которые снижают нагрузки, действующие на конструкцию.
На основе структурной модели [1] в работах [2–6] рассмотрены сложные структуры армирования по криволинейным ортогональным траекториям.
Влияние сложного нагружения на распределение силовых линий полей напряжений иллюстрирует следующая задача об эксцентрическом кольце. В данной работе на основе представления решения в виде тригонометрического ряда [7] по криволинейным координатам биполярной системы ( ^ , п )получены следующие результаты для неравномерно нагруженного эксцентрического кольца. Для неравномерной нагрузки на граничном контуре вида const + cos а * п ( а * - заданная амплитуда) контурные графики для компонент напряжений а , оп , а ^ п в биполярной системе координат приведены на рис. 1–3.
Многообразие структур армирования на базе ортогональной системы координат достигается построением изогональных траекторий к данным координатным линиям. Детерминантным методом в каждом случае устанавливается тип разрешающих систем дифференциальных уравнений, ставится соответствующая краевая задача.
Определение изогональных траекторий. Изогональная траектория – это плоская линия, пересекающая все кривые заданного на плоскости однопараметрического семейства под одним и тем же углом а . Углы Р 1 и в наклона траектории и кривой к оси OX связаны соотношением в 1 = в ± а.
Если однопараметрическое семейство плоских кривых задано в виде уравнения
F (x, y, a) = 0, (1) (где a – параметр), то изогональные траектории строятся из уравнения дF (x1, y1, a) dy1 дF (x1, y1, a) дy1 dx1 дx1
д F ( x 1 , y 1 , a ) д F ( x 1 , y 1 , a ) dy 1
д y 1 д x 1 dx 1
где k = tg а - известное значение; а - фиксированный угол, под которым изогональная траектория пересекает все кривые заданного на плоскости однопараметрического семейства. Исключая a из двух последних уравнений, получим соотношение, связывающее координаты x 1, y 1 точки изогональной траектории и угловой коэффициент касательной k , т. е. дифференциальное уравнение изогональных траекторий семейства (1). Общий интеграл полученного уравнения дает семейство от одного параметра изогональных траекторий [8].
Рассмотрим примеры построения изогональных траекторий к данным координатным линиям.
-
1. В биполярной системе координат ( £, п ) координатные линии ^ = ^ 0 = const представляют собой эксцентрические окружности с центрами на оси OX :
( x - a cth^ о ) 2 + y 2 = . , , , 2 . (shξ 0)2
Координатные линии п = п о = const — дуги окружностей с центрами на оси OY и проходящие через две точки x = ± a (полюсы):
22a x +(y + a ctg По) =—-----у. (4)
(sin η0)2
После введения соответствующей каждому из уравнений (3), (4) линейной замены координат приведем их к уравнению однопараметрического семейства окружностей вида x2 + y2 - b2 = 0, где b – параметр семейства, переобозначения координат не проводим. Для данного уравнения построим семейство изогональных траекторий, следуя (2) [8]. Получим для точек x1, y1, лежащих на траектории, дифференциальное уравнение dyi + xy dx1 y1
k .
-
1 - x y dy i
y 1 dx 1
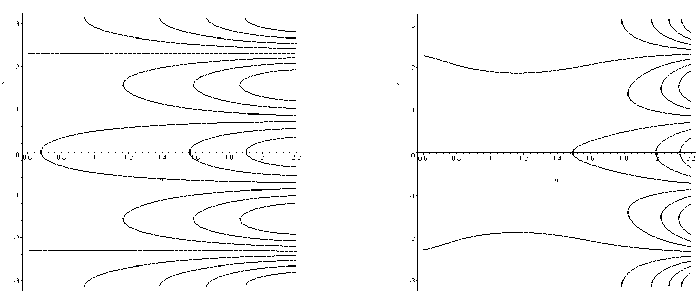
Рис. 1
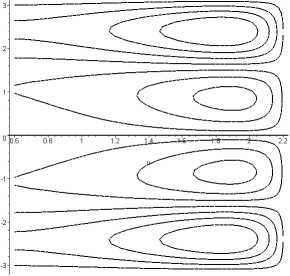
Рис. 3
Рис. 2
После преобразований уравнение (5) запишем как однородное дифференциальное уравнение, его решение имеет вид
собом дифференциальное уравнение изогональных траекторий
Cx 1 2 +y 1 2
x k arctg 1
y
= e 1 ,
x 1 У 1 ( У 1 ' - к )2 + ( У 1 ' - к )( М + 1) х х ( x1 - У 2 - a 2) - x 1 У 1 ( kV i + 1)2 = °.
где С – произвольная константа. Каждому семейству окружностей соответствует свое семейство изогональных траекторий в виде семейства спиралей (6).
2. В эллиптической системе координат координатными линиями являются £ -эллипсы и п -гиперболы:
Разрешая (11) относительно у ’ , получим два дифференциальных уравнения первого порядка. Представим его форму после ввода промежуточных обозначений. Пусть
xyx
—2—2--+ 2 2— = 1 и —-— a2ch2 £ a2sh2 £ a2 cos2 п
= 1 , (7) a sin п
где 2 a – фокусное расстояние. Связь между декартовыми ( x , у ) и эллиптическими координатами ( £, п ) дается формулами
S 1 = - к 2 + x 1 2 - у 2 - a 2 + к 2 у 2 + a 2 к 2 - 4 x 1 у 1 ,
S 2 = a 4 - 2 ax 1 2 + к 4 x 4 + 2 к 2 x 4 - 2 ak 4 x 1 2 + 2 x 1 2 у - + 42 44 42 222 422
+ 2 у 1 к + к у 1 + 2 ak у 1 + 4 к x 1 у 1 + 2 к x 1 у 1 + 4 4 222 222 22 42 4
+ x 1 + у 1 + a к у 1 - a к x 1 + 2 a у 1 + 2 a к + a ,
тогда искомые уравнения запишем в виде
x = a ch £ cos п , у = a sh ^ sin п . (8)
Запишем (7) как однопараметрическое семейство кривых и построим, следуя (2), соответствующее семейство изогональных траекторий. Введем параметр b 2 = a 2 ch £ , тогда однопараметрическое семейство
_________ S 1 ± V S 2 _________ 2( ку 1 + a 2 к + x 1 у 1 к 2 - x 1 у 1 - kx 2 )
запишем в виде
22 xy и - + L- - b b - a
= 1 .
Семейство изогональных траекторий проще находить, если известно дифференциальное уравнение исходного однопараметрического семейства кривых. Чтобы получить дифференциальное уравнение заданного семейства плоских кривых, необходимо продифференцировать (7), затем из полученного уравнения и уравнения семейства исключить параметр b. В итоге получим дифференциальное уравнение семейства xy (У')2 + У'(x2 - У2 - a2) - ху = 0. (10)
При рассмотрении семейства гипербол его дифференциальное уравнение совпадает с (10), но при этом параметры плоских кривых удовлетворяют условию a 2 < b 2 - a 2 < 0 [8]. Для семейств эллипсов и гипербол получим в соответствии с изложенным выше спо-
Иллюстрации изогональных траекторий к рассмотренным семействам эллипсов представлены
п
на рис. 4 ( к = 1) для a = , к = tga . Из вида уравне-4
ния (12) следует, что при построении изогональных траекторий могут возникнуть зоны сингулярности для определенных значений k и размеров плоской конструкции. При технологическом конструировании изделий всегда можно выбрать соответствующие размеры вне зоны сингулярности. Иллюстрации изогональных траекторий к рассмотренным семействам гипербол приведены на рис. 5-6 для к = 1 и к = 0,1 соответственно. Пример изогональных траекторий к семейству парабол вида у = ax 2 показан на рис. 7 для к = 3.
Как видим, уравнения изогональных траекторий содержат параметр к , при изменении значения которого имеем множество разнообразных траекторий. Располагая армирующие семейства волокон вдоль найденных траекторий, получаем разнообразную структуру армирования, при управлении которой можно перераспределять поля напряжений и деформаций внутри пластины.
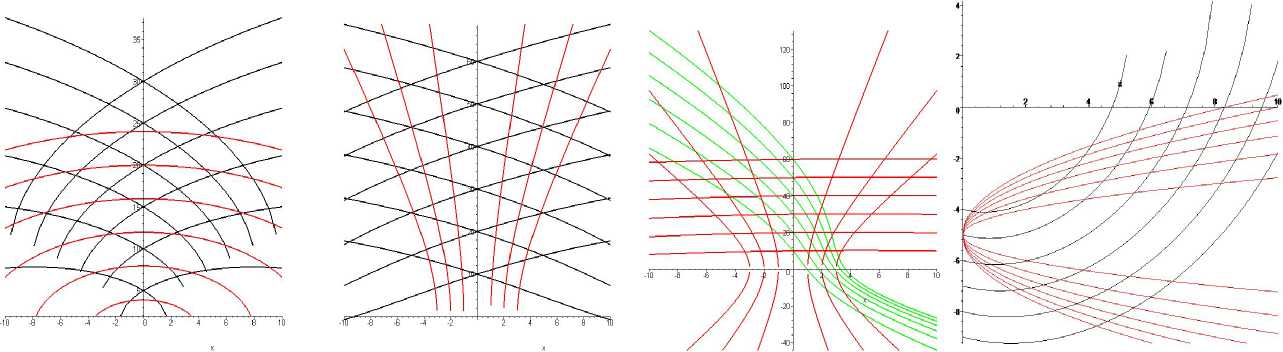
Рис. 4 Рис. 5 Рис. 6 Рис. 7
Изогональные траектории в полярной системе координат. Пусть задана полярная система координат (ρ , θ ). Запишем соотношение (2), отражающее геометрическое определение изогональных траекторий, связывающее направления траекторий и направления семейства, в полярной системе координат. Учтем, что тангенс угла μ между полярным радиусом и касательной в фиксированной точке для любой линии, заданной уравнением ρ = ρ(θ) в полярных координатах, запишется как tgμ= ρ . Последняя формула вы-ρ′ ражает геометрический смысл производной функции ρ = ρ(θ). Тогда соотношение (2), соответствующее полярной системе координат, запишем в виде
k ρ1 + 1 ′
ρ′ = ρ 1 , (13)
ρ ρ1 - 1
ρ1
где k = tgα , α ≠ π/2 – постоянный угол, под которым данное семейство пересекается семейством изогональных траекторий.
Рассмотрим уравнение однопараметрического семейства кривых в полярной системе координат Φ(ρ,θ,a)=0. Чтобы построить изогональные траектории, нужно составить дифференциальное уравнение dρ семейства, затем заменить в нем ρ′ = d θ на производные по формуле (13). В результате получим дифференциальное уравнение для определения изогональной траектории в полярной системе координат. Когда ρ2
α = π/2 , то производная ρ′ заменяется на - (осу-
ρ′
ществляется предельный переход в (13) при k →∞ ).
Пример 1. Рассмотрим пример построения семейства изогональных траекторий к семейству кардиоид. Пусть задано семейство кардиоид в полярной системе координат:
ρ=a(1 +cos θ), где a – параметр. Дифференцируем уравнение семейства по θ, из полученного уравнения и уравнения семейства исключаем параметр a , находим искомое дифференциальное уравнение семейства
ρ′ (1 + cos θ ) +ρ sin θ= 0 . (14)
Заменим в (14) производные по формуле (13), индексы опускаем, получим уравнение для изогональных траекторий ρ′ (1 + cos θ- k sin θ ) +ρ ( k + sin θ+ k cos θ ) = 0 .
Интеграл данного уравнения удается найти в аналитическом виде:
ρ ( θ ) = C ( k 2cos θ- cos θ+ 2 k sin θ- k 2 - 1) .
В случае k = tg a кривые, пересекающие заданное семейство кардиоид под углом a , задаются уравнением
ρ ( θ ) = a (1 + cos( θ - 2 a )) .
Семейство кардиоид и изогональные ему траектории, пересекающие кривые данного семейства под углом α =π 4 , изображены на рис. 8.
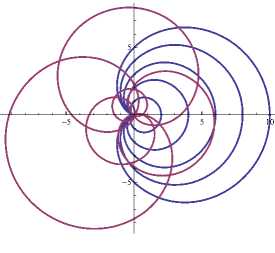
Рис. 8
Пример 2. Рассмотрим семейство логарифмических спиралей ρ ( θ ) = ae θ . Дифференциальное уравнение семейства: ρ′ =ρ. Изогональные траектории найдем, решив уравнение (13) для фиксированных значений k , при k = 1 решение этого уравнения ρ = const , т. е. заданное семейство спиралей под углом π пересекает семейство концентрических ок-4
ружностей с центром в начале координат (рис. 9).
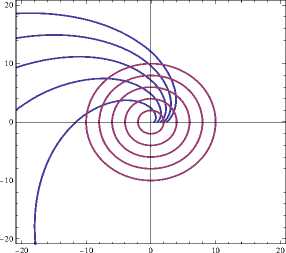
Рис. 9
Пример 3. Введем специальную структуру армирования: прямолинейные радиальные направления. Это пучок прямых с центром в начале координат. Пусть тангенс угла пересечения семейства прямых изогональными траекториями равен k = tg α, причем π
α ≠2 . Уравнение изогональных траекторий к данному семейству в полярной системе координат дает θ семейство логарифмических спиралей вида ρ =Cek , где С – произвольная константа.
Множество структур армирования на основе выбранного прямолинейного радиального направления представлено на рис. 10–12 для значений k = 1 , 2 , 3 соответственно.
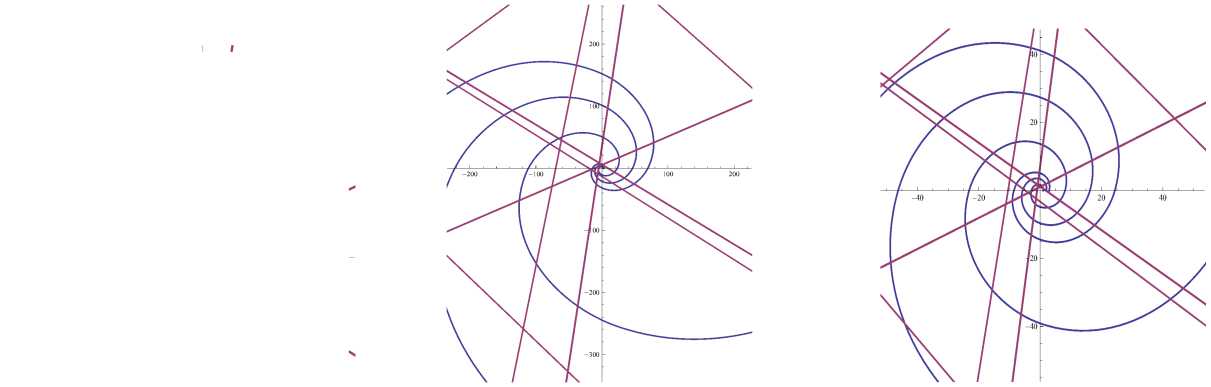
Рис. 11
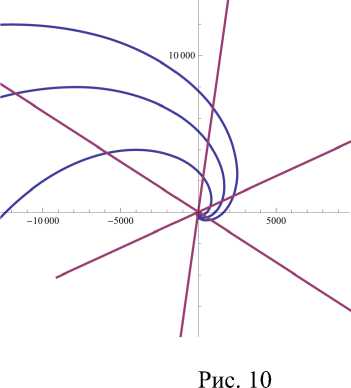
Рис. 12
Заметим, что при технологической реализации процесса изготовления армированной конструкции необходимо произвести вырез в виде некоторой окружности в начале координат, затем волокна располагают вдоль радиальных направлений. В качестве второго семейства армирующих волокон предлагается выбирать построенные изогональные траектории, т. е. найденные разнообразные семейства логарифмических спиралей.
Армирование по изогональным траекториям. Зададим некоторую криволинейную ортогональную систему координат ( ξ, η ) . Направим траектории армирования следующим образом: одна траектория армирования совпадает с линией криволинейной ортогональной системы координат, другая ей изогональна, т. е. пересекает ее под постоянным углом α, k = tgα . Тогда один угол армирования, например, ϕ 1 = π2 , второй угол армирования ϕ 2 = arctg k . Другой вариант армирования – ϕ 1 = 0 , ϕ 2 = arctg k .
Запишем условие постоянства сечений волокон m -го семейства в соответствии с [4; 6]:
∂∂
( H 2 ω m cos ϕ m ) + ( H 1 ω m sin ϕ m ) = 0, (16)
∂ξ ∂η
ξ = ξ 0 = const , η = η 0 = const . Первое уравнение
в (17) можно проинтегрировать:
ω ( ξ,η ) = H 2 ( ξ,η 0) ω 1 0( ξ )
1 H 2 ( ξ,η )
Поскольку криволинейная ортогональная система координат вводится аналитическими функциями комплексного переменного [6], то в каждой точке ( ξ, η ) коэффициенты Ламе равны между собой: H 1( ξ,η ) = H 2( ξ, η ) . При записи второго уравнения в (17) воспользуемся заменой ω 3 = H 1 ω 2 = H 2 ω 2 , получим
∂(ω3)+k ∂(ω3)=0. (18) ∂ξ ∂η
Уравнение (18) является однородным дифференциальным уравнением с частными производными первого порядка, условия на интенсивности ω 1 , ω 2 на
контуре, где волокна входят в конструкцию, соответствуют задаче Коши. Ищем семейство решений, содержащих произвольную функцию, предварительно строим обыкновенное дифференциальное уравнение в форме
где H 1 ( ξ, η ) , H 2( ξ, η ) – дифференциальные коэффициенты Ламе; ω m – интенсивности армирования, m = 1 , 2 . Для указанных структур армирования из
dξdη 1=k.
π
уравнения (16) в первом случае ( ϕ 1 = 2 , ϕ 2 = arctg k )
получим
∂ (H1ω1sinϕ1)=0, ∂η
∂ ( H 2 ω 2cos ϕ 2) +∂ ( H 1 ω 2sin ϕ 2) = 0 .
∂ξ ∂η
Дополнительные условия на интенсивности ω 1 ,ω 2 зададим на том контуре, где волокна входят в конструкцию. Предположим, что ω 10 ( η ) , ω 02 ( η ) , ω 10 ( ξ ) – известные функции, заданные на линиях
Находим общий интеграл (19), он равен - k ξ+ η = const . Тогда общее решение (18) запишем как
ω3=F1(-kξ+η),
где F1 – любая непрерывно дифференцируемая функция. Укажем очевидное решение: ω3 = const. Далее решаем задачу Коши. Пусть ω3=H2(ξ0,η)ω02(η) при ξ = ξ0. Разрешая общий интеграл (19) относительно переменной η , записываем искомое решение в виде
ω2 =
H 2 ( ξ 0 ,η ) ω 0 2 ( - k ξ+η+ k ξ 0)
H 2 ( ξ,η )
Во втором случае ( Ф 1 = 0 , ф 2 = arctg к ) уравнения (16) примут вид
“ 14 = H 1 E 2 ® 2 5а
— ( H 2 ю cos Ф , ) = 0 , 5^
“ 15 = 2 H 2 E 2 ® 2 5 а
k 3
(1 + к 2 ) 2 , k
(1 + к 2)2’
д
— ( Н 2to2 cos ф2) +--( Я , to2 sin ф2) = 0 .
д_ 22 дп 12
Г к2
“., = 2 H E ,ю2---- —- + Q m. 1 2 ,
16 1 ( 2 2(1 + к2)24
Решения находим аналогично (17):
® 1 ( ^,П )
H 2 ( ^ ,п ) ю ° ( п )
H 2М
ю 2
H Д^ ,п ) ю 2 ( - к ^ + 4 + к £ * )
H 2 ( ^,4 )
“- = H 2 E 2 ® 2 5 а (1 + к к 2)2 ,
Г к 2 )
“- = H 1 I v m 3 Q + E 2 ® 2 (1 + к 2)2 I,
Полученные значения для интенсивностей армирования используем далее в работе для вычисления коэффициентов при построении разрешающей системы уравнений. Различные решения для интенсивностей приводят к различным разрешающим уравнениям задачи армированной среды.
В работе [6] установлена разрешающая система трех дифференциальных уравнений в криволинейных ортогональных координатах относительно трех компонент тензора деформаций е 11 , е 22 , е 12:
“ 23 = H 2 E 2 ® 2 ^а
“ 24 = H 1 ( Q m 3 + E 2 ю 2
k 3
(1 + к2)2 ’ k4 )
(1 + к 2)2) ’
где
Г к 2 )
“2, = 2 H Q m , / 2 + E 2to2----- —- ,
25 2 ( 4 2 2 (1 + к2)2 J
“26 = 2 Я.Е2 го25„ — к— , 26 1 2 2 а (1 + к 2)2
Q = 1 - ( ю 1 + ю 2); E , v - модуль Юнга и коэффи-
д 2 е 22 , г д2 е 11 , г д2 е 12 , г де11 де п ,
+ С л + С э + Сд + С с + дс 2 дп д^дп дс дп
, Г ^Е—, Г ,^22, Где 2 . Где 2 , + C z + С -7 + С о + С л +
6 д^ 7 дп 8 д^ 9 дп
+ С 1° е 11 + С11 Е 22 + С 12 Е 12 = °;
де,, де,, де„ де„ де12
“" ,; + “ '2 + “ '3 + “ '4 ' + “ '5 + '
д^ дп д^ дп д^
де12
“ v., + дп
+ F ( H 1 , H 2 , « 1 , « 2 , Ф 1 , Ф 2 , Ф 1 ,§ , Ф 1 ,п , Ф 2 ,^ Ф 2 ,п ) + H 1 H 2 Ф 1 = °;
де,, де,, де„ де„ де12 деп
“ 21 — + “ 22^" + “ 23— + “ 24™ + “ 25^1- + “ 26 — + д^ дп дс дп дс дп
+ F 2 ( H 1 , H 2 , « 1 , « 2 , Ф 1 , Ф 2 , Ф 1 ,^ , Ф 1 ,п , Ф 2 ,^ Ф 2 ,п ) + H 1 H 2 Ф 2 = ° .
циент Пуассона материала связующего; Em – модуль Юнга материала m-го семейства армирующих воло-EE кон, m., =-----, m. =----. Значения символа 5„,
а
3 1 - v 4 1 + v входящего в выражения (21), равны единице или минус единице и учитывают выбор знака в формулах тригонометрии при переходе от синуса и косинуса угла а к его тангенсу в зависимости от величины угла армирования.
Исследуем тип разрешающей системы (20) для рассматриваемого случая армирования аналогично подходу [6]. Для этого найдем корни X характеристического уравнения
Значения коэффициентов Cs, s = 1, 12, через параметры Ламе приведены в [6]. В разрешающей системе (20) первое уравнение является уравнением совместности деформаций в произвольной криволинейной системе координат, два остальных уравнения – это уравнения равновесия плоской задачи в криволинейной системе координат, выраженные через компоненты деформаций е11, е22, е12. Для коэффициентов aij , в соответствии с введенным способом армирования, получаем выражения а,, = Я, (Qm + E, ю, + Е2 ю-
-
11 2 3 1 1 2 2(1 + к 2)2
а„ = Я.Е2 го25„
-
12 122 а (1 + к2)2
Г
“ 13 = H 2 I Qv m 3 + E 2 « 2 (1 + k 2 ) 2
,
( “ 11 X 2 + “ 12 X ) ( “ 13 X 2 + “ 14 X )
( “ 21 X 2 + “ 22 X ) ( “ 23 X 2 + “ 24 X )
- 2 X
( “ 15 X 2 + “ 16 X ) = ° , ( “ 25 X 2 + “ 26 X )
где коэффициенты “ ij , i = 1 , 2 ; j = 1 , 6 из (21).
Уравнение (22) представляет собой полное алгебраическое уравнение четвертого порядка. Его коэффициенты зависят от технических характеристик материала связующего и арматуры, интенсивностей армирования волокнами первого и второго семейства и параметра k , который задается при построении траекторий, изогональных к данному семейству кривых.
Исследуем корни характеристического уравнения при фиксированном материале, но изменяя интенсивности армирования и параметр k. Рассмотрим следующие варианты комбинации выбора материала для матрицы (связующего) и арматуры (армирующих волокон): связующее – алюминий, армируем стальными волокнами; связующее – медь, армируем волокнами из вольфрама; связующее – графит, армируем волокнами из стали. Зададим различные варианты значений интенсивности и параметра k. Результаты представим в виде таблицы.
Получили, что все корни могут быть действительными; корни могут быть действительными и комплексно сопряженными; все корни могут быть комплексно сопряженными. Основное влияние на характер корней оказывает значение параметра k – тангенса угла армирования по изогональной траектории.
Как видим из таблицы, разные значения углов армирования приводят к разным типам системы разрешающих дифференциальных уравнений (гиперболическому, эллиптическому, смешанному типам), а следовательно, и к разным постановкам краевых задач. Им соответствуют существенно разные решения, что позволяет управлять напряженно-деформированным состоянием конструкции.
Многообразие структур армирования на базе ортогональной системы координат достигается путем построения изогональных траекторий к данным координатным линиям, оно зависит от выбора параметра k и значений интенсивностей армирования. С изменением структур армирования существенным образом изменяются поля напряжений и деформаций.
Таким образом, разработан метод получения многообразия новых структур армирования путем построения изогональных траекторий к некоторым заданным координатным линиям. Решения новых краевых задач неоднородной анизотропной теории упругости показывают широкие возможности управления полями напряжений и деформаций в плоских тонкостенных конструкциях за счет целевого выбора криволинейных структур армирования.
