Моделирование динамических характеристик стабилизированного составного импульсного преобразователя

Автор: Бредихин Б.В.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 5-1 т.11, 2009 года.
Бесплатный доступ
Рассматривается моделирование динамических характеристик составного импульсного преобразователя с магнитно-связанными дросселями и дополнительным контуром регулирования суммарного тока в них. Получена непрерывная линейная модель преобразователя в виде структурной модели, с помощью которой методом имитационного моделирования исследованы его устойчивость и чувствительность. Результаты моделирования представлены в виде частотных характеристик разомкнутой и замкнутой системы управления преобразователем.
Стабилизированный составной импульсный преобразователь, матричные передаточные функции, структурная модель, динамические характеристики
Короткий адрес: https://sciup.org/148198682
IDR: 148198682 | УДК: 621.314.1
Modelling of dynamic characteristics of the stabilized compound pulse converter
The modelling dynamic characteristics of the compound pulse converter with an intergrated chokes and an additional control loop of a total current in them is considered. The continuous linear model of the converter in the form of structural model by means of which the method of imitating modelling investigates its stability and sensitivity is obtained. Results of modelling are presented in the form of frequency characteristics of the open-loop and closed-loop control system by the converter.
Текст научной статьи Моделирование динамических характеристик стабилизированного составного импульсного преобразователя
Составные импульсные преобразователи [1, 2] до настоящего времени слабо изучены, что препятствует обоснованному применению их на практике. Однако применение составных преобразователей целесообразно, например, в активных корректорах коэффициента мощности [3], в импульсных регуляторах-модуляторах ключевых генераторов модулированных колебаний (КГМК), поскольку позволяет обеспечить электромагнитную совместимость с цепью питания и последующим генераторным каскадом [3, 8]. Важным недостатком базового инвертирующего импульсного регулятора с таким же диапазоном регулирования выходного напряжения является импульсный характер передачи энергии, что заставляет использовать дополнительные фильтры на входе и выходе преобразователя [2, 3].
Динамические характеристики КГМК наряду с характеристиками в квазиустановившемся режиме определяются, в основном, динамическими параметрами регулятора-модулятора. В то же время при построении его системы управления должна учитываться особенность топологии составного импульсного конвертера с магнитносвязанными дросселями для обеспечения совместимости апериодического и колебательного процессов в КГМК.
амплитудно-частотная характеристика (АЧХ) является важнейшей, так как по ней определяется верхняя граница рабочего диапазона частот линейной системы, чувствительность замкнутой системы к изменению входного напряжения а также ее устойчивость при замыкании обратных связей, например, с использованием частотных критериев Найквиста [9].
Как известно, АЧХ линейной системы сравнительно просто можно получить из ее передаточной функции (ПФ), которая для непрерывной линейной модели (НЛМ) разомкнутой системы управления преобразователем получена в работе [10] в виде передаточных матричных функций (ПМФ) его составных частей. Передаточная функция НЛМ удобна не только для определения динамических показателей, но и для моделирования систем, представленных структурными схемами [5, 9], по сравнению с импульсными моделями [6], главный недостаток которых – большая сложность получения частотных характеристик.
Цель данной статьи – моделирование динамических свойств стабилизированного составного импульсного преобразователя с магнитно-связанными дросселями на основе передаточных функций.
Рассмотрим процесс и результаты моделирования с использованием ПМФ стабилизированного составного импульсного преобразователя с магнитно-связанными дросселями, работающего в режиме непрерывной проводимости силового коммутатора [4]. Общая схема системы управления (рис. 1) состоит из двух контуров регулирования – внешний по среднему значению входного напряжения второй части составного конвертера и внутренний по суммарному току магнитно-связанных дросселей.
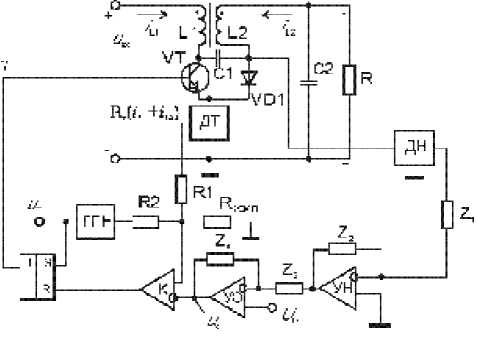
Рис. 1. Общая схема управления по среднему значению входного напряжения второй части конвертера и максимальному току ключа
Она содержит: датчик напряжения ДН с согласующим усилителем УН, усилитель ошибки УО, компаратор К, датчик тока ДТ и генератор пилообразного напряжения ГПН, RS-триггер. Диаграммы сигналов на элементах схемы представлены на рис. 2.
При частоте изменения входных сигналов много меньше частоты коммутации f к — 1 / Т , согласно рис. 2, может быть составлено уравнение для момента окончания импульса, в котором сигнал управления Y рассматривается как непрерывная переменная [5]:
R T ( iкл + KY /2 f к ) + m nY / f к = U E - (1) где U E - выходное напряжение усилителя ошибки; R T – сопротивление токового датчика; 1кл = ^L 1 ср + ^L 2 ср — ток силового ключа (транзистор VT) в середине импульса (рис. 2); к , т П -тангенсы угла наклона тока силового ключа и пилообразного сигнала соответственно; m П = U M / T ; U M — максимальное значение пилообразного напряжения.
Для исследуемого регулятора при сбалансированном снижении уровня пульсаций токов на интервале импульса коэффициент k равен [4, 8]:
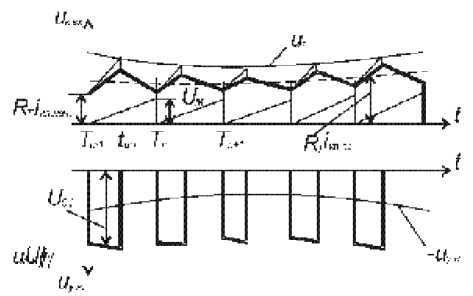
Рис. 2. Диаграммы сигналов на входах компаратора, датчике напряжения и усилителе напряжения при управлении по среднему значению напряжения и максимальному току di In кл вх к — — , dt (1 + kC ) L 2
где (1+k c )L 2 – эффективная индуктивность вторичной обмотки интегрированного дросселя; k c – коэффициент магнитной связи.
Уравнение управления (1) относительно уп- равляющего сигнала у после линеаризации его в окрестности периодического режима ивх — Uвх и Y — Г, приводится к следующему уравнению в общей матричной операторной форме, при нулевых начальных условиях:
~( Р ) — F ( Р )~ ( Р ) + Q ( Р ) ~( Р X (2) где F(р), Q(р) – матрицы-строки, связывающие коэффициент g с вектором переменных состояния и вектором входных воздействий, соответственно записываются в виде
F ( Р ) — - (1 + k C ) L 2 f K d n 1 K ( Р ) K u ( Р ) Г 1 0
U bx L R t ’
Q ( р ) —- Г^ П [ 1 0 0 0j
U вх
В соотношениях (3) К и ( р ) - коэффициент передачи усилителя напряжения УН с учетом элементов ДН (передаточная функция ПФ датчика напряжения); K (р) – коэффициент передачи УО с учетом цепей коррекции;
U вх
П (1 + k c) L2 "
U вх + m П---
R T
Получение математической модели регулятора в форме пространства состояний по дифференциальным уравнениям силовой части преобразователя [10] вызывает серьезные затруднения. Для решения этой задачи, используя метод разделения движений [7], сводим исследуемую систему к двум системам второго порядка, описывающих первую и вторую части составного преобразователя соответственно.
Используя этот принцип построения, получена непрерывная линейная модель НЛМ составного преобразователя с магнитно-связанными дросселями и двухконтурной системой управления в виде структурной схемы (рис. 3) на основе передаточных матричных функций (ПМФ) разомкнутых контуров управления его составных частей [10]. Причем каждая ПМФ содержит НЛМ соответствующей силовой части и управляющую часть.
Здесь передаточные функции W 2 (p), W 3 (p) и W 4 (р) передают сигналы, формирующие управляющий сигнал ~( р ) ; W i 1 Y ( p ) и W i 2 Y ( p ) -передаточные функции “ток дросселя первой
3,fw
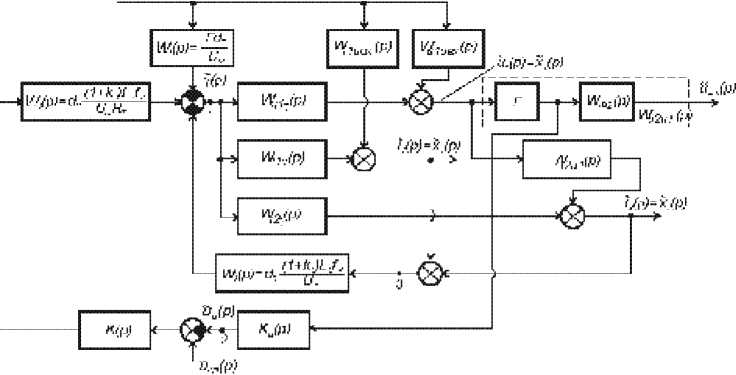
Рис. 3. Стру ктурная схема замкнутого составного преобразователя с магнитно-связанными дросселями
части – управляющий сигнал” и “ток дросселя второй части – управляющий сигнал” соответственно; W u 1 Y ( P ) - ПФ “напряжение на конденсаторе первой части – управляющий сигнал”; W u 2 u i ( Р ) — ПФ “Напряжение на выходном конденсаторе - входной сигнал”; W i 2 u 1 ( Р ) -ПФ “Ток дросселя второй части – входной сигнал”; W i1 uвх (p) – ПФ “ток дросселя первой части – входное напряжение”; W u1 uвх (p) – ПФ “Напряжение на конденсаторе первой части – входное напряжение”.
ОЦЕНКА УСТОЙЧИВОСТИ НЛМ ПРЕОБРАЗОВАТЕЛЯ С УЧЕТОМ ПФ РАЗОМКНУТОЙ СИСТЕМЫ
Размыкание схемы в точке 2 (рис. 3) при структурном преобразовании внешней цепи главной обратной связи и сигнале ихх ( р ) = 0 позволяет получить ПФ разомкнутой системы:
Wpa32(Р) = K(Р)Ku (РЖ(Р) х х Wu 1у (РWu2и 1(Р)
Х 1 + W 2 ( Р ) [ W 1 у ( Р ) + W 2 у ( Р ) ] ’ где передаточные функции
Wu 1 М =
и.f1-Р ™ ]
вх ( ( Г )2 дэ )
р 2 (1 + k c ) L 1 C 1 + Р + ( Г / (6) R Э
W u 2 u 1 ( Р )
Г р2 (1 + kc )L2C2 + р ” рC^ 2 + 1 (7)
R
Известно, что при динамическом синтезе систем управления импульсными преобразователями предпочтение отдается частотным методам, что обусловлено их наглядностью и возможностью сравнительно легко исследовать устойчивость систем высокого порядка. Применяя метод имитационного моделирования с использованием программных пакетов Matlab и MathCad и структурных преобразований исследуемой НЛМ регулятора-модулятора, получены частотные характеристики вариантов ПФ разомкнутых контуров НЛМ при и хх (р) = 0.
Анализ устойчивости по логарифмическим частотным характеристикам проводился при следующих исходных данных:
2 U^ [ р RC + 1 ] Д э Н 2 J
W ( Р )
Р 2(1 + k c ) LC + Р ' L + ( г )2
R Э
K. ( Р ) = -K 4; К ( Р ) = К,
PT 1 + 1
PT 2 + 1
"7 Г Г'(8)
W 2 у (Р ) =
Ur ( рДС2 +1)
Р 2(1 + k c ) L 2 C 2 + р” R C 2 + 1
где К 1 – коэффициент передачи звена ДН по постоянному току; Т 1 – постоянная времени ДН; К 2 – коэффициент передачи усилителя ошибки; Т 2 и Т 3 – постоянные времени форсирующей и интегрирующей составляющих дополнительного звена УО.
U вх = 27 В; U С1 = 40 В; I Н = 1 А; f = 120 кГц; L 1 = 274 мкГн; L 2 = 278 мкГн; k С = 0,86; C 1 = 6,6 мкФ; C 2 = 6,6 мкФ; K 1 = 0,38; K 2 = 1,1; U М = 1 В;
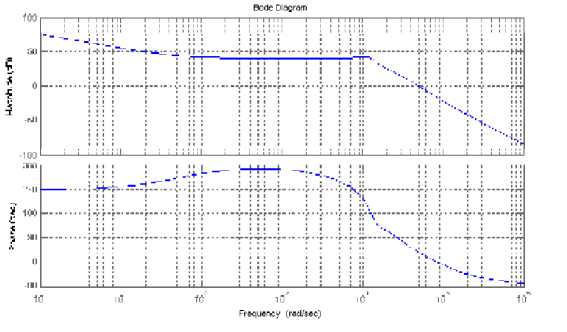
Рис. 4. Частотные характеристики разомкнутой в точке 2 системы при управлении по выходному напряжению и суммарному току
T 1 = 0,9 . 10-4с; Т 2 = 0,02 с; Т 3 = 0,001 с; RT = 0,1 Ом.
Эффективность подключения токового контура можно увидеть из частотных характеристик, построенных по вышеприведенным исходным данным и показанных на рис. 4.
Общим для частотных характеристик, представленных на рис. 4 является то, что система обладает необходимым запасом устойчивости (демпфирование с внесением положительного фазового сдвига), система является гарантированно устойчивой, несмотря на наличие “правого” нуля в ПМФ первой части НЛМ.
ОПРЕДЕЛЕНИЕ ЧУВСТВИТЕЛЬНОСТИ ВЫХОДНОГО НАПРЯЖЕНИЯ
ЗАМКНУТОГО ПРЕОБРАЗОВАТЕЛЯ КО ВХОДНОМУ
В работе [10] приведены алгоритмы получения передаточных функций составных частей стабилизированного импульсного преобразователя. Располагая ПФ замкнутой системы, можно выяснить, каким образом выход преобразователя реагирует на изменение выходного напряжения, а также анализировать получаемые переходные процессы. Требуемые ПФ находим из передаточных матричных функций системы, причем ПМФ “переменные состояния – входные сигналы” достаточно просто можно получить [5, 10] из НЛМ силовых схем и уравнений управления составных частей исследуемого преобразователя.
Отсюда ПМФ замкнутой системы управления для первой части преобразователя описывается следующим уравнением:
H„AP ) = [ pE - A , - HF , ( P )№ + HQ , ( P ) ] (9)
Соответственно – для второй части преобразователя ПМФ описывается соотношением H , ( P ) =[ pE - A , — HF ( P )№ , + HQ ( P ) ] (10) при этом общая ПМФ замкнутой системы управ-
ления преобразователя представляет собой произведение ПМФ составных частей
Hxu ( P ) = Hxu, ( P ) Hxu„ ( P )• (11)
Матрицы-строки для первой и второй частей системы регулирования, в которой действуют обратные связи как по среднему значению входного напряжения второй части преобразователя, так и по максимальному току магнитно-связанных дросселей, определяются из равенств (3) следующим образом:
(' + k c ) L 2 ftd П
FI(P)=--u----- вх
Q , ( P ) =- U2- [ ' 0 ];
вх
F , ( P ) =
'
K ( P ) K u ( P ) Г
R T
;
(' + kc ) L 2 fKd n
1 ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
U вх
Q ,, ( p ) = [ 0 0 ].
0 1
Передаточные функции К(р) и К u (р) , учитывающие ДН и последовательное звено коррекции в прямой цепи регулирования, оставляем с теми же самыми, как и в (8), значениями К 1 , К 2 и Т 1 , Т 2 ,, Т 3 , входящих в них, также рассчитывались в программе MathCad.
Наибольшую сложность вызывает определение матрицы [ рЕ -А I - Н I F(p) ] и ее обращение. Использование для операций с матрицами в символьном виде программного пакета MatLab, а также построение логарифмической амплитудной характеристики (ЛАХ), позволило получить результирующую ПФ замкнутой системы управления составного преобразователя (ввиду громоздкости выражений их здесь не приводим), соответствующую выражению (11) с учетом соотношений (4) – (7). Результаты моделирования
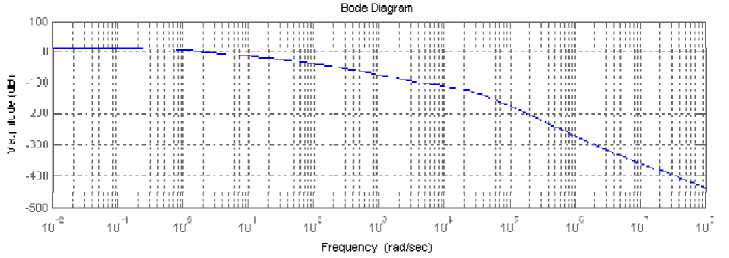
Рис. 5. Логарифмическая амплитудная характеристика замкнутой системы при воздействии входного напряжения и управлении по входу второй части составного регулятора и суммарному току
чувствительности выходного напряжения замкнутого преобразователя ко входному (рис. 5) показали более широкую полосу входных возмущений при действии обратной связи по току магнитно-связанных дросселей.
Таким образом, моделирование динамических характеристик на основе передаточных функций, полученных по вышеприведенным алгоритмам, показало следующее:
-
1. Исследованы два из трех фундаментальных свойств статических преобразователей – устойчивость и чувствительность; для исследования инвариантности необходимы дополнительные структурные преобразования приведенной непрерывной линейной модели.
-
2. Частоты резонанса полученных ЛАХ составного импульсного преобразователя соответствуют частоте колебаний его первой, повышающей части, причем значение частоты колебаний зависит от выбранной рабочей точки – заданного периодического режима преобразователя.
-
3. Введение дополнительного внутреннего контура регулирования по суммарному току магнитно-связанных дросселей значительно улучшает параметры переходного процесса составного преобразователя.
Список литературы Моделирование динамических характеристик стабилизированного составного импульсного преобразователя
- Севернс Р., Блум Г. Импульсные преобразователи постоянного напряжения для систем вторичного электропитания/Пер. с англ. Под ред. Л.Е. Смольникова. М.: Энегроатомиздат, 1988. 294 с.
- Бирзниекс Л. В. Импульсные преобразователи постоянного тока. М.: Энергия, 1974. 256 с.
- Белов Г.А. Исследование статических характеристик составных импульсных преобразователей//Электричество. 2005. № 5. С. 39-46.
- Cuk S. A new zero-ripple switching DC-to-DC converter and intergrated magnetic IEEE PESC Record. New York, 1980. РР. 274 -281.
- Мелешин В.И. Транзисторная преобразовательная техника. М.: Техносфера, 2005. 632 с.
- Денисов Ю.А., Иванец С.А. Импульсные системы стабилизации постоянного напряжения с нечеткими и адаптивными регуляторами//Электричество. 2007. № 7. С. 35-39.
- Геращенко Е.И., Геращенко С.М. Метод разделения движений и оптимизация нелинейных систем. М.: Наука, 1975. 296 с.
- Бредихин Б.В. Исследование характеристик импульсного регулятора напряжения с интеграцией магнитных компонентов методом математического моделирования. Тольятти: Тольят. политехн. ин-т., 1995. 23 с. Деп. в Информэлектро 07.08.95 № 10.
- Теория автоматического управления. Ч. 1. Теория линейных систем автоматического управления/Под ред. А А. Воронова. М.: Высшая школа, 1977. 303 с.
- Бредихин Б.В. Передаточные функции в непрерывной линейной модели составного импульсного преобразователя с магнитно-связанными дросселями и дополнительным контуром регулирования суммарного тока в них//Практическая силовая электроника. 2007. № 27. С. 34 -40.
