Моделирование динамических режимов вибрационного робота, перемещающегося по поверхности с вязким сопротивлением

Автор: Яцун Сергей Федорович, Волкова Людмила Юрьевна
Журнал: Спецтехника и связь @st-s
Статья в выпуске: 3, 2012 года.
Бесплатный доступ
В статье представлены результаты исследования прямолинейного и криволинейного движений виброробота, перемещающегося за счет периодических колебаний двух внутренних масс.
Вибрационный робот, внутренняя масса, система автоматического управления
Короткий адрес: https://sciup.org/14967099
IDR: 14967099
Текст научной статьи Моделирование динамических режимов вибрационного робота, перемещающегося по поверхности с вязким сопротивлением
В статье представлены результаты исследования динамики мобильного вибрационного робота, безотрывно перемещающегося по поверхности с вязким сопротивлением за счет периодических движений внутренних масс. Особенностью рассмотренного устройства является то, что взаимодействие с поверхностью осуществляется при помощи опорных элементов, углом наклона которых к поверхности определяется модель силы вязкого сопротивления. Для движения объекта по заданному закону необходимо управлять величиной и направлением сил трения, что достигается перемещением внутренних масс по заданному закону.
Одно из достоинств такого вида систем заключается в отсутствии внешних движителей, что позволяет создавать устройства с гладким герметичным корпусом и использовать их для решения таких технологических задач, как мониторинг состояния окружающей среды, разведывание полезных ископаемых, взятие проб воды и воздуха в зонах, недоступных другим роботам, транспортировка грузов.
Закономерности и особенности перемещения вибрационных роботов, различных по конструкции, количеству и законам движения внутренних масс, изучаются многими отечественными и зарубежными исследователями. В работах [1 – 3] рассматривается прямолинейное движение двух- массовой системы в среде с сопротивлением, установлены законы движения внутренних масс, при которых объект перемещается с наибольшей за период средней скоростью. В [4] представлены результаты исследований влияния периодических относительных колебаний внутренней массы на характер перемещения робота, анализ которых позволяет определить условия для реализации движения системы в желаемом направлении. Перемещение вибрационного робота по горизонтальной поверхности за счет гармонических колебаний внутренних масс в горизонтальной и вертикальной плоскостях с одинаковой частотой и со сдвигом фаз исследовано в [5]. Математическая модель движения вибрационного робота по шероховатой горизонтальной плоскости предложена в [6], получены основные закономерности движения. В [7, 8] описываются особенности управления движением двухмассового вибрационного робота, в [9, 10] показаны способы управления направлением перемещения системы с тремя вращающимися массами. Исследование динамики плавающего робота, перемещающегося посредством периодических колебаний внутренних масс и асимметричной силы вязкого трения, создаваемой благодаря форме корпуса, приведено в [12]. В [13] для управления силой вязкого сопротивления используются
специальные элементы поплавков трехмассовой плавающей системы.
Особенностью вибрационных устройств является то, что их движение осуществляется за счет сил трения, возникающих при взаимодействии объектов с опорной поверхностью, поэтому сопротивление среды оказывает существенное влияние на динамику устройства, что нашло отражение в работах [1, 11]. В [1] рассмотрены линейный и квадратичный, изотропный и анизотропный законы сопротивления среды, в [11] представлены кусочно-линейное, квадратичное и сухое кулоново трение.
Математическая модель виброробота
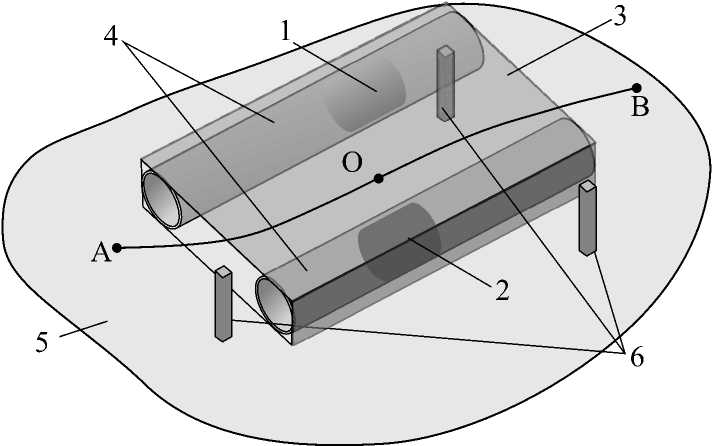
Рассматриваемый виброробот состоит из трех основных частей ( рис. 1 ): двух подвижных внутренних масс 1 и 2 ( m 1 и m2 ) и корпуса 3 массой m . Внутренние массы перемещаются относительно корпуса по направляющим 4. Корпус взаимодействует с поверхностью 5, на которую нанесено смазывающее вещество, при помощи трех опорных элементов 6.
Движение робота по некоторой криволинейной траектории АВ осуществляется за счет сил трения, возникающих при перемещении подвижных масс в направляющих по заданным законам.
Для исследования движения вибрационной системы введем абсолютную неподвижную систему координат О1х1у1 и относительную Оху , жестко связанную с корпусом робота, начало координат О которой совпадает с центром масс корпуса, ось Ох параллельна траекториям движения внутренних масс. Поворот системы координат Оху относительно О 1 х 1 у 1 определяется углом ϕ .
Будем считать, что корпус робота представляет собой абсолютно твердое тело, центр инерции которого расположен в точке О ( рис. 2 ). Внутренние массы 1 и 2 являются точечными и движутся по прямолинейным траекториям, которые расположены в плоскости Oxy , параллельны оси Ox и равноудалены относительно центра масс корпуса робота на расстояние b . Внутренние массы движутся по гармоническим законам A j (t), j = 1, 2 вида
Aj(t) = aj·sin(ωj·t + αj), (1)
где a j – амплитуда, ω j – круговая частота, α j – начальная фаза перемещения внутренней массы.
Робот взаимодействует с поверхностью в точках C i , i = 1, 2, 3 при помощи опорных элементов, являющихся абсолютно твердыми телами. Силы вязкого сопротивления возникают в точках С 1 и С 2 , трением в точке С 3 пре-
Рис. 1. Общий вид вибрационного робота
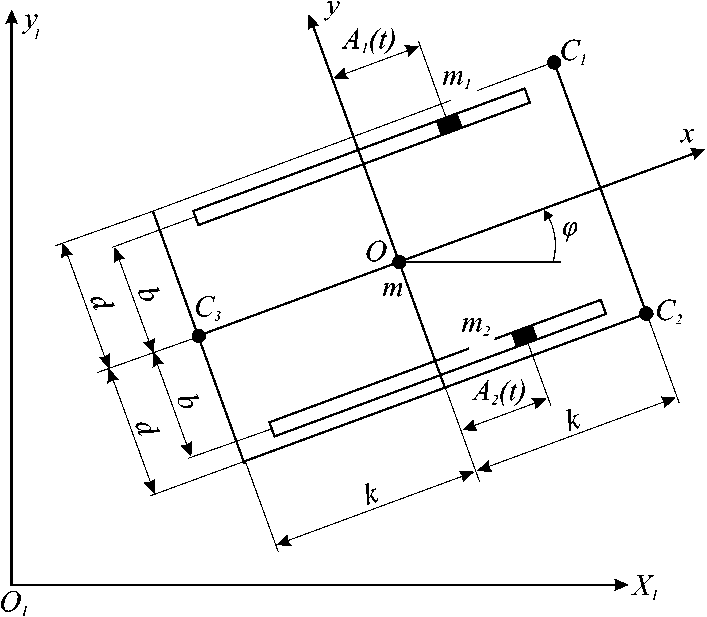
Рис. 2. Кинематическая схема робота небрегается. Модели этих сил вдоль осей относительной системы координат определяются углами наклона опор к осям Ox и Oy, а численные значения коэффициентов вязкости вдоль этих осей - углами наклона опор к осям Ox и Oy и свойствами смазывающего вещества.
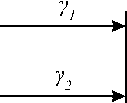
Относительно положительного направления оси Ох i -ый опорный элемент может быть ориентирован под тремя углами γi , каждому из которых соответствует своя сила вязкости ( табл. 1 ).
Табл. 1. Зависимость силы вязкости вдоль оси Ох от угла γi
|
γi = 90° |
γi = 45° |
γi = 135° |
|||
|
Q Cxi0 |
sr (0) - µ x0 x i |
1 |
- 0 , xC) = 0 , -^"x®,^ >0, - MX" xC) , ,v < 0 |
1 |
1 " ■= 0 • _ max (.(О) < (0) q P xG x Cj , xq > ", _ min . (0) • (0) n M x" x C; , x q < 0 |

В табл. 1 : x C i — проекция скорости i -ого опорного элемента на ось Ох , µ x s r 0 , µ x m 0 in , µ x m 0 ax – средний, минимальный и максимальный коэффициенты вязкости вдоль оси Ох .
Угол наклона всех опор относительно оси Oy равен 900, поэтому вдоль нее возникает сила вязкого сопротивления, определяемая по формуле
ОУ
где Ц y0 — коэффициент вязкости вдоль оси О у , y 0 — проекция скорости i -ой опоры на ось Оу .
Зависимость коэффициентов вязкости от свойств смазывающего вещества проявляется в изменении численных зна-sr min max чений параметров µ x 0 , µ x 0 , µ x 0 , µ y 0 при использовании различных веществ. Соотношение между коэффициентами вязкости вдоль оси Ох в i-ой точке опоры µx0i и вдоль оси Оу µy0 описывается формулой
|
r toj |
|
α |
Рис. 4. Структурная схема управляемой вибрационной системы
µx0i = µy0(1 + piχ)
где 0 ≤ χ ≤ 1 – коэффициент, зависящий от свойств смазывающего вещества,
Р = 11Yi - 2 I sgn(x0)-V 45 > ‘
параметр, являющийся функцией угла наклона опоры к положительному направлению оси Ох ( рис. 3 ).
При вертикальном расположении опорного элемента коэффициенты вязкого сопротивления вдоль осей Ох и Оу равны между собой:
sr
µ x = µ y .
При наклоне опорного элемента к оси Ох на углы γi = 45 и 135° значение коэффициента вязкого сопротивления µx0i может быть равно:
^min = ^ У о (1 - х), (6)
Для движения вибрационного робота по требуемой траектории необходимо изменять модуль и направление сил трения, что достигается за счет управляемого перемещения внутренних масс и изменения ориентации опорных элементов. Структурная схема системы управления устройством показана на рис. 4 , где управляющими воздействиями являются углы γ1 , γ2 наклона опорных элементов в контактных точках С1 и С2 ; амплитуда а j , круговая частота ω j и начальная фаза α j движения j -ой внутренней массы. Координаты х и у центра масс корпуса устройства и угол ϕ поворота корпуса робота относительно его центра масс выступают в качестве управляемых параметров.
Дифференциальные уравнения движения объекта имеют вид:
.. 2 .. .. ..
j = i
-
-Ф2 ( A j cos Ф- B j sin Ф) + A j cos
= Qx1,
2 .. ..
-
-ф. 2 ( A j sin ф + B j cos ф ) + A j sin ф ] = Q y1 ,
j = 1
+2ф.AJAJ+ q)(A2 + B2)-AyB7] = Mo , где
В j = (–1)j+1b – координата j -ой массы в проекции на ось Оу ; Qx1 , Qy1 – проекции главного вектора сил сопротивления на оси О1х1 и О1у1 ,
МО – главный момент сил сопротивления, J – момент инерции корпуса.
Исследование характера движения робота
Задачей численного моделирования является выявление влияния на характер перемещения объекта параметров модели силы вязкого сопротивления и закона движения внутренних масс. Будем рассматривать два вида совместного перемещения внутренних масс m1 = m2 при a1 = a2 = a и
ω1 = ω2 = ω, отличающиеся начальными фазами: синфазное ( α1 = α 2 ) и в противофазе (α 1 = α 2 + π).
В результате проведенного исследования и анализа полученных графиков установлено, что при синфазном движении внутренних масс, одинаковой ориентации опор γ1,2,3,4 = γ относительно вертикали и асимметричной силе сопротивления объект перемещается вдоль оси, совпадающей с продольной осью корпуса, в сторону меньшего коэффициента вязкости ( рис. 5 ).
При разной ориентации опор и противофазных колебаниях внутренних масс вибрационная система совершает вращательное движение относительно неподвижного центра масс корпуса ( рис. 6 ).
Программно-управляемое движение робота
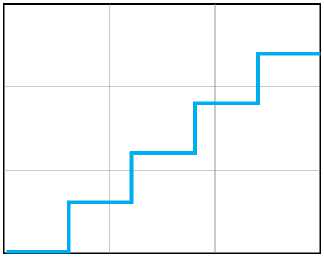
На основании проведенного анализа динамических режимов вибрационного робота разработан алгоритм ступенчатого перемещения устройства, заключающийся в чередовании участков прямолинейного и вращательного движений. Реализовать движение робота по различным криволинейным траекториям возможно путем варьирования времени прямолинейных участков и значений углов поворота корпуса ( рис. 7 ).
Исследование влияния коэффициента вязкости на среднюю скорость движения вибрационной системы
На рис. 8, 9 показаны зависимости средних линейных и угловых скоростей движения вибрационного робота от соотношения между минимальным и максимальным коэффи-min max циентами вязкости µ x 0 / µ x 0 вдоль оси Ох для значений коэффициента χ = 0; 0,2; 0,3; 0,5. По графикам видно, что чи-
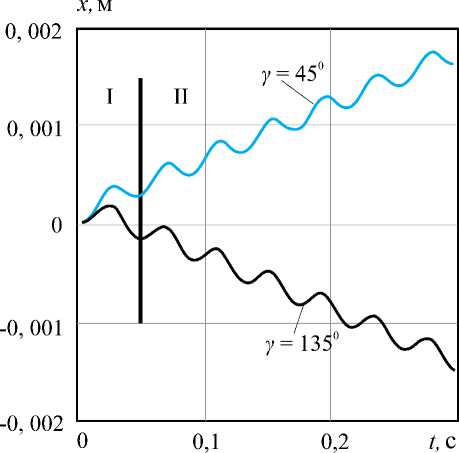
Рис. 5. Графики движения робота при синфазном перемещении внутренних масс:
I – переходный режим, II – установившийся режим
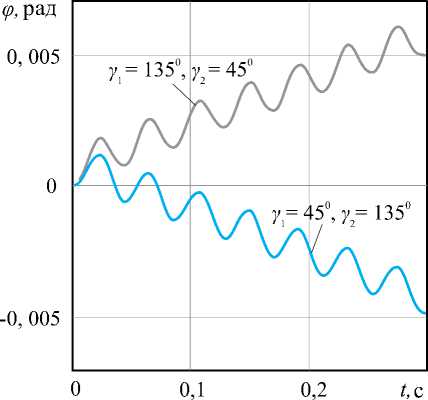
Рис. 6. Графики движения робота при перемещении внутренних масс в противофазе
V, м
О, 002
О, 001
О
м
a
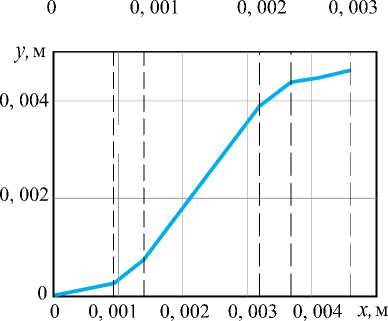
Рис. 7. Криволинейное движение виброробота: а – ступенчатое;
б – по s-образной траектории
б
сленное значение коэффициента вязкости при синфазном движении внутренних масс при γ = 45° не влияет на среднюю линейную скорость движения при χ = 0 , при χ ≠ 0 средняя линейная скорость x . sr уменьшается с ростом соотношения µ x m 0 in / µ x m 0 ax ( рис. 8 ). Причем, чем меньше коэффициент вязкости вдоль оси Ох , тем больше средние линейные скорости устройства при одинаковых значениях χ .
При разных углах наклона опор и противофазном движении внутренних масс с увеличением отношения минимального коэффициента вязкости к максимальному и с уменьшением коэффициента вязкости вдоль оси Oy средние угловые скорости уменьшаются при всех значениях коэффициента χ, кроме χ = 0 (рис. 9).
Выводы
В работе исследованы режимы управляемого движения трехмассового мобильного вибрационного робота, перемещающегося по горизонтальной плоскости в среде с вязким трением за счет периодических колебаний двух внутренних масс. Выявлено влияние модели силы вязкого сопротивления, ориентации опорных элементов и параметров законов колебаний внутренних масс на характер движения устройства. Реализовано программно-управляемое движение объекта по криволинейной траектории, которое заключается в чередовании участков прямолинейного и вращательного перемещений корпуса за счет управления углами наклона опорных элементов и сдвигом фаз колебаний двух внутренних масс.
min max
Установлено, что с соотношения µ x 0 / µ x 0 , параметра χ и уменьшением коэффициента вязкости µy0 наблюдается возрастание линейной и угловой скоростей объекта
Работа выполнена в рамках гранта РФФИ проект 1.64.11 «Динамика управляемого движения вибрационных мобильных роботов по шероховатой поверхности по криволинейной траектории» № 11-08-01142.
Список литературы Моделирование динамических режимов вибрационного робота, перемещающегося по поверхности с вязким сопротивлением
- Черноусько Ф.Л. Оптимальные периодические движения двухмассовой системы в сопротивляющейся среде./Прикладная математика и механика, 2008. -Т. 72. -№ 2. -С. 202 -215.
- Черноусько Ф.Л. Анализ и оптимизация движения тела, управляемого посредством подвижной внутренней массы./Прикладная математика и механика, 2006. -Т. 70. -№ 6. -С. 915 -941.
- Черноусько Ф.Л. О движении тела, содержащего подвижную внутреннюю массу./Доклады АН. -М.: РАН, 2005. -Т. 405. -№ 1. -С. 56 -60.
- Черноусько Ф.Л. Оптимизация движения в сопротивляющейся среде тела с подвижной внутренней массой./Тр. ИММ УрО РАН, 2006. -Т. 12. -№ 1. -С. 242 -248.
- Болотник Н.Н., Зейдис И.М., Циммерман К. и др. Динамика управляемых движений вибрационных систем./Изв. РАН.ТиСУ, 2006. -№ 5. -С. 157 -167.
- Abaza K. Ein Beitrag zur Anwendung der Theorie Undulatorischer Lokomotion auf mobile Roboter: Evaluierung theoretischer Ergebnisse an Prototypen. -Ilmenau: Universitäts-Verlag, 2007. -126 р.
- Болотник Н.Н., Фигурина Т.Ю. Оптимальное управление прямолинейным движением твердого тела по шероховатой плоскости посредством перемещения двух внутренних масс./Прикладная математика и механика, 2008. -Т. 72. -№. 2. -С. 216 -229.
- Фигурина Т.Ю. Оптимальное управление движением системы двух тел по прямой./Изв. РАН.ТиСУ, 2007. -№ 2. -С. 65 -71.
- Vartholomeos P., Papadopoulos E. Analysis, Design and Control of a Planar Micro-robot Driven by Two Centripetal-Force Actuators./Proc. IEEE Intern. Conf. on Robotics and Automation (ICRA '06). -Orlando. FL. USA, 2006. -Р. 649 -654.
- Vartholomeos P., Papadopoulos E. Dynamics, Design and Simulation of a Novel Microrobotic Platform Employing Vibration Microactuators//J. Dynamic Systems, Measurement, and Control, March 2006. -V. 128/123. -Р. 122 -133.
- Черноусько Ф.Л., Болотник Н.Н. Мобильные роботы, управляемые движением внутренних тел./Тр. ИММ УрО РАН, 2010. -Т. 16. -№ 5. -С. 213 -222.
- Яцун С.Ф., Безмен П.А., Климов Г.В., и др. Математическое моделирование плавающего робота./Управляемые вибрационные технологии и машины. Ч. 2. Курск: Курский гос. техн. ун-т, 2010. -С. 265 -269.
- Волкова Л.Ю., Яцун С.Ф. Управление движением трехмассового робота, перемещающегося в жидкой среде./Нелинейная динамика, 2011. -Т. 7. -№ 4. -С. 845 -857.
