Моделирование динамики дозаторных систем с гидравлическим приводом

Автор: Ханов Алмаз Муллаянович, Кобитянский Алексей Ефимович, Шафранов Алексей Владимирович, Петров Дмитрий Алексеевич, Кузнецов Михаил Владимирович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Статья в выпуске: 6-2 т.15, 2013 года.
Бесплатный доступ
Рассматривается методика построения математической модели дозаторной системы с гидравлическим приводом с учетом динамической взаимосвязи ее элементов. Полученная система дифференциальных и алгебраических уравнений переменной структуры позволяет осуществить имитационное моделирование динамики дозаторных систем и их оптимальное проектирование.
Дозаторные системы, математическая модель
Короткий адрес: https://sciup.org/148202586
IDR: 148202586 | УДК: 621-189.2-047.58
Modeling the dynamics of dispensary systems with hydraulic drive
The method of creation the mathematical model of dispensary system with hydraulic drive taking into account dynamic interrelation of its elements is considered. The received system of differential and algebraic equations with variable structure allows to carry out imitating modeling the dynamics of dispensary systems and their optimum design.
Текст научной статьи Моделирование динамики дозаторных систем с гидравлическим приводом
В качестве примера рассматриваются дозаторные системы с гидравлическим приводом на основе центробежных и шестеренчатых насосов, структурно-функциональная схема которых представлена на рис. 1.
В процессе моделирования динамики дозатора приняты следующие гипотезы: жидкость сжимаема, стенки цилиндров 2 и 5 податливы, поршни цилиндров 2 и 5 – жесткое целое. Унифицированная расчетная схема, позволяющая вести расчеты для центробежного (связь I ) или для шестеренчатого (связь II ) насоса на основе схемы рис. 1, приведена на рис. 2.
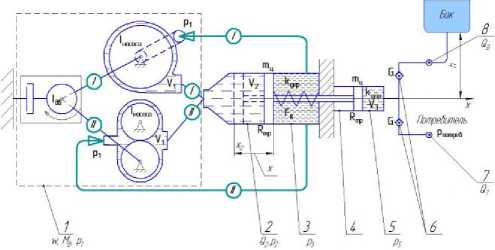
Рис. 2. Расчетная схема насоса-дозатора с гидравлическим приводом:
Q 2 =S 2 vп , Q 7, Q 8 – расход жидкости в соответствующих элементах, м3/с; p 1 , p 2 , p 3 , p 5 , p 7 , p 8 – давление в соответствующих элементах, Мпа; x – перемещение поршня, м; v п = x – скорость поршня, м/с; ω – угловая скорость ротора двигателя, рад/с; M д – момент электродвигателя, Н·м; V 1 – рабочий объем насоса, м3
Математические соотношения, описывающие работу дозатора в соответствии с расчетной схемой рис. 2, при учете динамической взаимосвязи всех его элементов [2-6], представлены системой уравнений:
^ 1 [ M g U ( t ) i - V н ( Р 2 - Р 1 ) ]
_ (А V 2 + x5 2 ) f d 2 E Ж2 )
Avn = I 1 +I
-
УПр2 E ж2 I 8 2 E„2 j
dP 2 = V.^H 5 2 Vп dt Kупр2
P g = P 2 5 2 - P 3 5 3 - P 5 5 5 - c ц ( X 0 + X )
n _ n 0 , ™P 2 d 2 H 2 „ I ,
R тр = R тр +---2--- P 2 +
+ ( H 2 + H 5 ) V n|
тар 2( d 2 + d ‘ ) H
1 p ,1- ’ф ( d 5 + d 51 H |P 5I ■ "ф'Ф " ' | p ,| +
dvn "
11 = 1 m,
1 dt
1 Г ■ / Г
---[ P g - R mp Sign( v п ) ] 1 m ц |
■ Vп = 0
. V п * 0
и
P g > R тр
0,
V п = 0
и
Р
dx dt ~ vп
K
• упр5
_ (А V 5 + ( L - х ) 5 5 )
dp 5 dt
5 5 V п -
E ж5
'Q 7 + Q 8
d E d5Eж5
8 5 E „5
Q 7 =
Q 8 =
K упр5 '0.
. G 7 V р 5 - р 7 . 0,
. G 8 V P 8 - P 5 .
Р 7 ^ Р 5
Р 7 < Р 5
Р 5 ^ Р - 8
Р 5 < Р 8 .
где I =( I дв- I ред1) i + I ред2+ I насос
– приведенный момент инерции двигателя, редуктора и насоса, кг·м 2; i – передаточное
число редуктора; U ( t ) – функция управления (1 – включено, 0 - выключено); S 2, S 3, S 4, S 5, d 2, d 5, d 2' d 5', δ2, δ5 – площади, м2, диаметры и толщины стенок цилиндров, м; V н – активный объем насоса (центробежного V н = V 1 /2π, шестеренчатого V н= bm ( z 1+1)), м3; η – КПД насоса; Δ V 2, Δ V 5 – мертвые объемы полостей 2 и 5, м3; L – длина хода поршня, м; E ж2 , E ж5 , E ст2 , E ст5 , K упр2 , K упр5 , – модули упругости, МПа и коэффициенты упругости жидкости и стенок полостей 2 и 5; m ц – масса поршня, кг; P д – движущая сила поршня, Н; R тр0, R тр, φ2, φ5 – силы трения, Н, и коэффициенты трения в манжетах; c ц – жесткость пружины, Н/м; H 2 , H 5 – высота манжетного уплотнения в цилиндрах 2 и 5, м; G 7 , G 8 – проводимость клапанов 7 и 8 [5], м4·с-1·Н-0,5.
Для удобства моделирования система (1) с помощью идентификаторов переменных характери-
стик нормируется и приводится к виду:
dy i = 1 [ M д yU ( t ) i - V . ( У 2 - P 1 ) ] dt I
( А V 2 + У 5 5 2 ) L
d 2 E ж2 ^ 8 2 E ст2 j
dy 2 _ Vн У1П- 5 2 У 4 dty
У 6 = У 2 5 2 - P 3 5 3 - У 3 5 5 - c ц ( X 0 + У 5 )
„ _ D 0 . ”Ф 2 d 2 H 2 L, , ™P 2 ( d 2 + d 2 ) H 2 n , ™Ф 5 ( d 5 + d 5 ) H 5 n , ™Ф 5 d 5 H 5 L, I ,
У 7 = R тр +----2----У 21+--------2--------3'+-------2--------5 +----2
+ ( H 2 + H 5)| У 4
Г у 4 = 0 и у 6 > у 1
| У 4 * 0
У 4 = 0 и У 6 ^ У 7
оУ д — [ У 6 - У 7 sign( У 4 )1
= m„ dt
| 0.
dyy = У dt 4
_ (А V 5 + ( L - У 5 ) 5 5 ) Г, d d 5 E ж5 )
-
У 11 = Е I 1 +ЪЕ I
Eж5 V 85Eст5 j dy 3 _ 55 У 4 - У 8+У 9
dt y 11
_ Г0, Р 7 ^ У 3
-
8 [ G 7 V У 3 - Р 7 . Р 7 < У 3
' 0. У 3 ^ Р 8
-
У 9 =1 /-------
- |G8у1 Р8 - У3. У3 < Р8
где ω=y1; p2=y2; p5=y3; vп=y4; x=y5; Pд=y6; Rтр=y7; Q7=y8; Q8=y9; Kупр2=y10; Kупр5=y11.
Системы (1-2) являются нелинейными и содержат как дифференциальные, так и алгебраические уравнения. Следует отметить переменное строение математических соотношений, так как в процессе нагнетания и всасывания изменяется ряд параметров и структура исходной системы. Математическое моделирование динамики дозатора осуществляется с помощью программного комплекса, в основе которого лежит метод Рунге-Кутта 4 и 5 порядков с автоматическим выбором шага (схема Dormand and Prince) в системе Matlab [7]. Процесс моделирования начинается с решения уравнения моментов на валу насоса, определяющего изменение его угловой скорости, в результате чего вычисляется расход насоса. Из уравнения сжимаемости жидкости определяется давление жидкости в нагнетательной камере гидроцилиндра, действующее на поршень, и приводящее его в движение при учете сил сопротивления. Вследствие разницы расхода, происходит приращение давления в камере дозатора. Функционирование клапана определяется возникающим перепадом давления в камере дозатора. Расход через нагнетательный клапан определяет расход всей системы дозатора. При перемещении поршня на длину рабочего хода, происходит отключение электродвигателя. Структура уравнений изменяется, осуществляется переход между рабочим и обратным ходами и фиксируется время tраб. Окончание процесса дозирования определяется временем рабочего и обратного хода tпол. Результаты процесса моделирования формируются в виде таблиц и графиков динамических характеристик процесса дозирования. На рис. 3-9 в качестве примера представлены фрагменты расчетов дозаторов с центробежным и шестеренным насосами, при давлении в магистрали потребителя 400 атм. и перемещении поршня 60 мм.
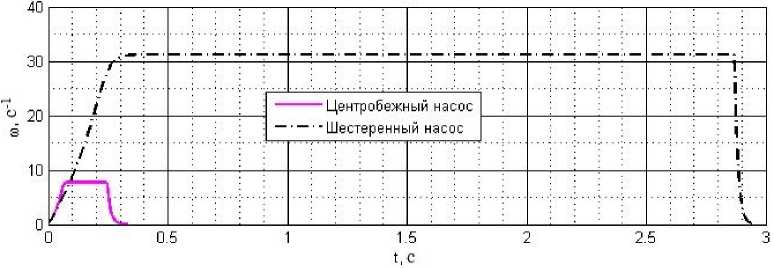
Рис. 3. График угловой скорости ротора двигателя
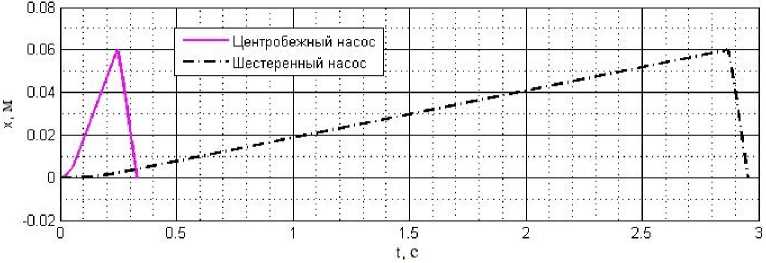
Рис. 4. График перемещения поршня
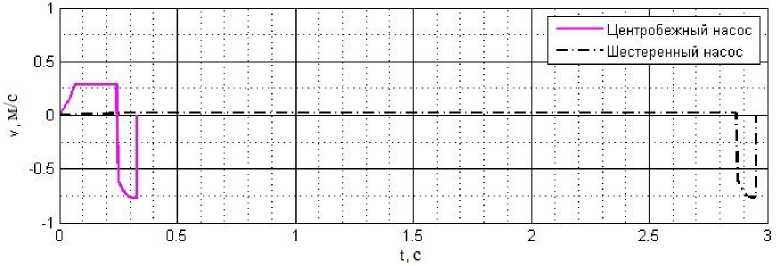
Рис. 5. График скорости поршня
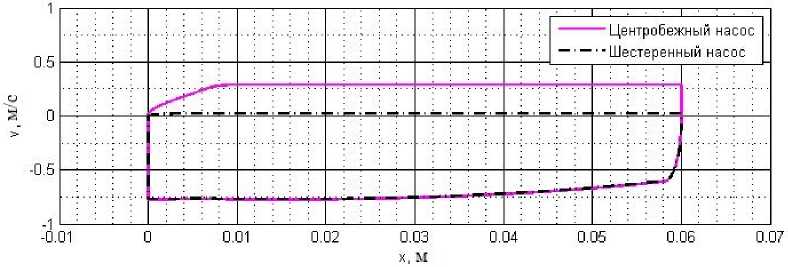
Рис. 6. Совмещенный график скорости и перемещения поршня
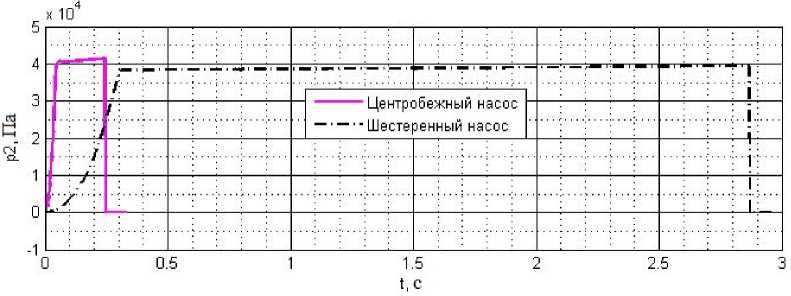
Рис. 7. График давления масла в напорном гидроцилиндре
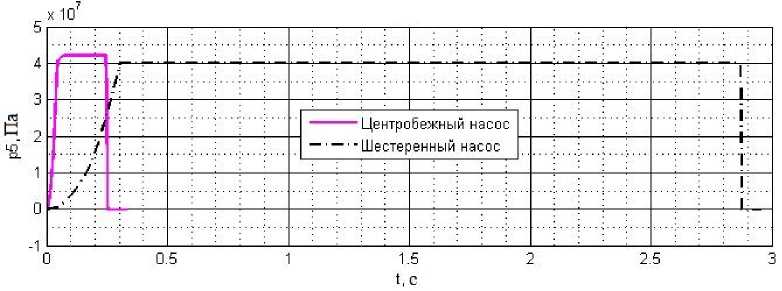
Рис. 8. График давления дозируемой жидкости в камере дозатора
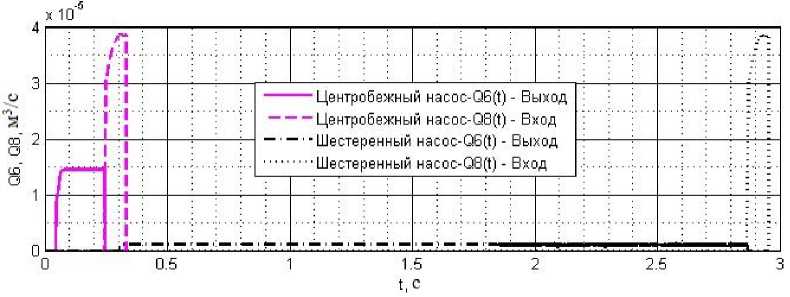
Рис. 9. График расхода дозатора
Выводы: проведенные расчеты показали значительное отличие рассматриваемых типов привода, как по конструктивно-технологическим параметрам, так и по и физическим характеристикам, необходимых для удовлетворения заданных параметров технологического процесса дозирования. Полученные результаты позволяют осуществить имитационное моделирование динамики дозаторных систем, численно оценить критерии качества функционирования и перейти к их оптимальному проектированию.
Список литературы Моделирование динамики дозаторных систем с гидравлическим приводом
- Гуревич, А.Л. Импульсные системы автоматического дозирования агрессивных жидкостей/А.Л. Гуревич, М.В. Соколов. -М.: Энергия, 1973. 112 с.
- Ханов, А.М. Математическая модель дозаторной системы/А.М. Ханов, А.Е. Кобитянский, А.В. Шафранов, Д.А. Петров//Известия Самарского научного центра РАН. Т. 14, №4(5), 2012. С. 1329-1334.
- Бажин, И.И. Автоматизированное проектирование машиностроительного гидропривода/И.И. Бажин, Ю.Г. Беренгард, М.М. Гайцгори и др. Под общ. ред. С.А. Ермакова. -М.: Машиностроение, 1988. 312 с.
- Соколов, Д.А. Математическое моделирование гидравлического импульсного устройства/Научно-технические ведомости СПбГПУ. -СПб.: СПбГПУ. 2006. № 45. С. 60-65.
- Гладких, П.М. Исследование динамической жесткости гидроцилиндра объемного гидропривода с учетом растворенного воздуха в рабочей жидкости/П.М. Гладких, О.В. Дмитриенко//Вестник национального технического университета ХПИ. Сборник научных трудов. Тематический выпуск «Технологии в машиностроении». -Харьков: НТУ ХПИ, 2010. №54. С. 25-30.
- Андриенко, П.А. Методы формирования динамической модели гидропередачи/Теория механизмов и машин. -СПб.: СПбГПУ. Том 5. №2(10). 2007. С. 52-62.
- Shampine, L.F. The MATLAB ODE Suite/L.F. Shampine, M.W. Reichelt. -SIAM Journal on Scientific Computing. 1997. N 18-1.
