Моделирование динамики регулируемого гидромотора

Автор: Емельянов Р.Т., Султанов Н.С., Закурдаев А.В., Скурихин Л.В.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Техника
Статья в выпуске: 8, 2014 года.
Бесплатный доступ
Разработана система автоматического управления частотой вращения гидромотора. Приведены результаты исследования гидропривода с регулируемым гидромотором.
Золотник гидросистемы, гидроцилиндр, аксиально-плунжерный гидромотор, имитационное моделирование, передаточная функция, гидравлический регулятор
Короткий адрес: https://sciup.org/14083856
IDR: 14083856 | УДК: 625.056/086:678.842.1
Текст научной статьи Моделирование динамики регулируемого гидромотора
Введение . Интенсификация режимов технологических машин-автоматов требует расширения диапазона регулирования скорости гидроприводов вращательного движения. При этом возникает необходимость обеспечения статической и динамической точности процесса регулирования аксиально-плунжерного гидромотора [1–3]. Для проектирования гидроприводов с наклонным блоком цилиндров необходимо разработать математические модели, позволяющие адекватно описывать переходные процессы, возникающие при изменении режима работы гидроприводов.
Характер переходного процесса во многом определяется физическими процессами в качающем узле и регуляторе рабочего объема гидромотора [4, 5].
Цель работы. Исследование динамических процессов объёмного гидропривода с наклонным блоком цилиндров и дискретным регулированием гидромотора.
Условия и методы исследования . Объектом исследований выбран регулируемый гидромотор, при-веденый на схеме гидропривода (рис. 1).
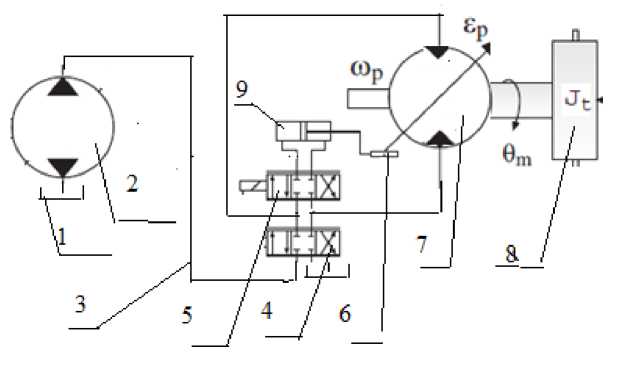
Рис. 1. Гидросхема гидропривода с регулируемым гидромотором
Исполнительным механизмом системы управления служит аксиально-поршневой регулируемый мотор. Мотор состоит из блока регулятора и качающего блока. Качающий узел преобразует энергию давления рабочей жидкости в крутящий момент на валу гидромотора. Распределитель служит для изменения рабочего объема гидромотора посредством изменения угла наклона блока цилиндров.
Для анализа и исследования динамических процессов в гидроприводе использовано имитационное моделирование. Математическая модель гидропривода представляет собой совокупность уравнений, записанных для отдельных его элементов. В гидросистему включается дополнительная электрическая цепь, представляющая собой первую ступень усиления (первый каскад) сигнала. Входной сигнал представляет собой электрический сигнал малой мощности, поэтому его необходимо усилить, чтобы он после преобразования в механический мог перемещать золотник гидрораспределителя.
Условием срабатывания автоматической системы управления является
R 2
E 2 = D E 1 ,
R 1
где E 1 , E 2 – электрическое напряжение на входе и выходе сигнала; R 1 , R 2 – сопротивление на входе и выходе сигнала.
Если это условие нарушается, то появляется напряжение, которое после усиления приводит в движение сервозолотник гидрораспределителя, направляющий поток рабочей жидкости в нужную полость гидроцилиндра. Перемещение штока гидроцилиндра, связанное с потенциометром, происходит до тех пор, пока не будет уравновешено входное напряжение, т.е. пока напряжение в точке сравнения вновь не станет равным нулю. Таким образом, мы имеем здесь потенциометрическую обратную связь.
Уравнение напряжений в электрической цепи магнита [2]
U
dI у dx я ус ■ R у I у+Ly IT + Ск ~л ■
где U ус – напряжение на выходе электронного усилителя; R y – активное сопротивление обмотки управления электромагнита; L y – индуктивность обмотки управления электромагнитом; C к – коэффициент противо-ЭДС; x я – смещение якоря электромагнита золотника.
После преобразований уравнение цепи управления ЭМ будет иметь вид
T —y- + i = k. • U упр dt y iu y
Из уравнения цепи управления электромагнита следует, что передаточная функция цепи управления электромагнита будет следующей:
W(s) = k Fi ' k u
Tупр • s + 1
.
L
Здесь T =----y--постоянная времени передаточной функции цепи управления электромаг-упр Ry + Reax нита, где Ly – индуктивность обмотки управления электромагнита; Ry – активное сопротивление обмотки
электромагнита; R вых
тромагнита; k u =
– сопротивление выходного каскада электронного усилителя; k Fi – постоянная элек- 1
– коэффициент передачи электронного усилителя.
R y + R в Ы х
Расход жидкости через канал в золотнике [2]
QKaH = V
кан
• П dцу 2
• §•
- Р сл\ • sign ( Р цу 2
- рсл ) ,
где µ кан – коэффициент расхода канала в золотнике; d цу2 – диаметр золотника; δ – зазор между гильзой гидроцилиндра и поршнем; ρ – плотность рабочей жидкости.
После преобразований передаточную функцию для золотника запишем в виде
W ( s ) = ’
T 3 s + 1
F3 + kQpkmp3
где T3 =-------- y --постоянная времени передаточной функции основного золотника; kQP y • Сз
F3 • kQx k3 =------— - коэффициент усиления передаточной функции основного золотника.
kQPy • Сз
Уравнение движения поршня гидроцилиндра имеет вид [2]
d2 z dz m —цс + к —— + P = p F ц. с dt 2 mp. ц. с dt нагр p пор порш
-
P F , pшт шт ,
где m ц.с – приведенная масса поршня и подвижных элементов силового гидроцилиндра; k тр.ц.с – коэффициент вязкого трения в гидроцилиндре; PΣ нагр – внешняя нагрузка, действующая на шток; F шт – площадь, равная площади поршня гидроцилиндра за вычетом площади штока; F порш – площадь поршня; p пор – давление в поршневой полости гидроцилиндра; p шт – давление в штоковой полости гидроцилиндра, z ц.с – перемещение поршня силового цилиндра. Отсюда передаточная функция давления в силовом гидроцилиндре
W p ' s ) = тЪ’
Т рцс s + 1
Vс где T с =-----ц--постоянная времени передаточной функции давления силового гидроцилиндра. рцс ж Qp
Математическая модель гидромотора [2]
dP ( t ) dt
a p
K
K упр
р (t) - к^ ^„(t)+-p- u (t) упр упр da^t) = q bp р(t) — b^^ (t) + Xмн(t) dt I b I b I b
где P(t) - гидравлическое давление потока жидкости; u(t) - управляющее воздействие; а гм ( t ) - скорость вращения вала гидромотора; Купр – коэффициент упругости трубопровода с жидкостью передающей гидравлической линии; aр – коэффициент, учитывающий потери давления в гидравлической линии при передаче потока жидкости; qн – максимальный рабочий объем насоса; qгн – максимальный рабочий объем гидравлического двигателя питателя; Iв – приведенный к валу двигателя момент инерции; bгм – коэффициент гидромеханических потерь, зависящих от условной скорости; bp – коэффициент гидромеханических потерь, зависящих от давления на входе гидромотора.
Расход на входе гидромотора
Q c =
Vqn
1000 7,’
где Vq – вытесняемый гидромотором объем за один оборот; n – частота вращения вала гидромотора; ή v – объемный КПД гидромотора.
Выходной крутящий момент
М = Vq ∆ рn , c 20 π
где Δр – перепад давлений на входе и выходе гидромотора. Выходная мощность
Р = Q с ∆ рn c 600
.
Частота вращения n= Qc1000η
Vq
.
На рисунке 2 приведены результаты моделирования гидропривода с регулируемым гидромотором.
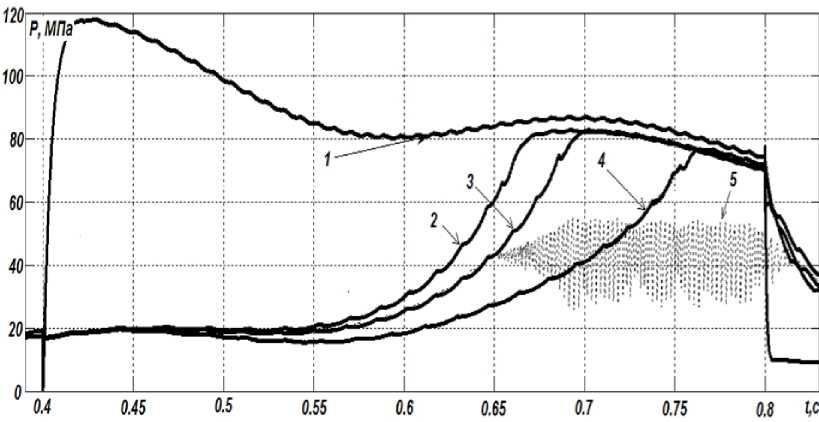
Рис. 2. Результаты моделирования гидропривода с регулируемым гидромотором
Зависимость 1 иллюстрирует изменение давления в напорной линии в предположении мгновенного изменения рабочего объема. Это приводит к резкому увеличению крутизны фронта нарастания давления и пикового давления в напорной линии. Зависимости 2, 3 иллюстрируют нарастание давления при реализации механизма жидкостного трения и конечной скорости изменения объема гидромотора при различных диаметрах поршня гидроцилиндра блока регулятора объема: d 1 = 2,6 см; d 2 =1,8 см – для кривой 2; d 1 = 2,2 см; d 2 =1,8 см – для кривой 3. Зависимость 4 – при реализации механизма смешанного трения, что существенно увеличивает время изменения объема гидромотора. Зависимость 5 моделирует включение переливного клапана
Заключение
-
• Математическая модель гидравлического регулятора позволяет моделировать переходные процессы, связанные с изменением режима работы гидропривода.
-
• Результаты моделирования динамических процессов в гидроприводе позволили установить минимальную величину времени срабатывания гидравлического регулятора при дифференциальном подключении гидравлического регулятора к напорной гидролинии и выполнении условия d 1 / d 2 = 2 , время срабатывания на уменьшение рабочего объема и его увеличение одинаково.
