Моделирование движения опоры шагающей машины с динамической устойчивостью при помощи стенда

Автор: Алейников Юрий Георгиевич, Дидманидзе Отари Назирович
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Процессы и машины агроинженерных систем
Статья в выпуске: 1, 2021 года.
Бесплатный доступ
Введение. Проблема изучения шагающих машин на протяжении многих десятилетий не теряет актуальности. Современные технологии помогают создавать новые конструкции с цифровым управлением. Программное обеспечение, позволяющее шагающей машине самостоятельно передвигаться, является сложной задачей для реализации. Для движения машины необходимо обрабатывать данные с помощью множества сенсоров. В статье продемонстрированы конструкторские решения и алгоритмы, применяемые для управления движением опытной шагающей машины. Материалы и методы. Для моделирования движения шагающей машины и экспериментальных исследований был изготовлен стенд, повторяющий все электронные системы машины. Показаны порядок перестановки опор во время перемещения и траектория движения опоры. Рассмотрена конструкция датчиков и принцип действия. Продемонстрирован стенд для моделирования с описанием его электронных компонентов. Результаты исследования. Были определены оптимальные параметры движения опоры. Описан циклический алгоритм движения опоры по траектории, состоящей из прямолинейных отрезков. Решена проблема синхронизации движения множества опор с применением многопоточного асинхронного программирования, адаптированного для многомерных процессоров. Смоделированы процесс опускания опоры на поверхность и реакция циклического алгоритма на изменение показаний датчиков удара и нагружения. Обсуждение и заключение. Разработан алгоритм движения опоры с реакцией на изменение показаний датчиков. Проведенные исследования позволили получить оптимальную алгоритмическую модель, к которой легко добавлять новые реакции автоматической системы управления движением, основанные на показаниях датчиков.
Шагающая машина, датчики шагающей машины, алгоритмы управления движением, траектория движения опоры, электроника шагающей машины, микронтроллеры, датчики
Короткий адрес: https://sciup.org/147221991
IDR: 147221991 | УДК: 621.3:004.932.2 | DOI: 10.15507/2658-4123.031.202101.080-096
Modeling movement of supports of walking machines with dynamic stability by using a stand
Introduction. Walking machines have been interesting for decades. Modern technologies make it possible to create new designs with digital control. Creating software that allows a walking machine to move independently is a difficult task. Walking machine onboard computer needs to process data from sensors in real time. The article demonstrates design and algorithms used to control the motion of an experimental walking machine. Materials and Methods. To simulate the motion of a walking machine and experimental studies, a stand replicating all the electronic systems of the machine was made. The order of rearrangement of the supports during the motion and the trajectory of the support movement are shown. The design of sensors and their principle of operation are considered. The simulation bench with a description of its electronic components is demonstrated. Results. The optimal parameters of the support motion are determined. A cyclic algorithm for specifying the motion of a support along a trajectory consisting of rectilinear segments is described. The problem of synchronization of motion of a set of supports using multithreaded asynchronous programming adapted for multidimensional processors has been solved. The process of lowering the support to the surface and the response of the cyclic algorithm to changes in the shock and load sensor readings are simulated. Discussion and Conclusion. An algorithm for propulsion with reaction to changes in sensor readings has been developed. The conducted research allowed us to obtain an optimal algorithmic model of motion, to which it is easy to add new reactions of the automatic motion control system based on sensor readings.
Текст научной статьи Моделирование движения опоры шагающей машины с динамической устойчивостью при помощи стенда
Шагающие машины способны двигаться по местности, недоступной для других типов транспортных средств, так как им не требуется ровная опорная поверхность [1]. Шагающая машина – это платформа, используемая для передвижения четырех и более опор. При движении по неровной поверхности в сложных условиях шагающие машины могут быть более эффективными в сравнении с колесными и гу- сеничными транспортными средствами. Кроме того, шагающие машины, благодаря маневренности их опор, способны передвигаться по крутым склонам. Такие машины применяются для выращивания растений в условиях открытого и закрытого грунта. В этой области робот имеет преимущество перед колесными и гусеничными роботами, поскольку контактирует с землей в отдельно взятых точках и наносит меньше вреда растениям по сравнению с колесными машинами. Динамически устойчивым машинам требуется энергия для удержания собственного веса. А статически устойчивые могут удерживать вес при отключенном электропитании.
Походка – это скоординированная последовательность передвижения опор шагающей машины для перемещения корпуса в желаемом направлении или ориентации. Способ передвижения опор является главной сложностью при создании алгоритмов движения шагающих машин. Важно синхронное передвижение всех опор машины. Для этого применяется циклическая последовательность движений. Одной из трудностей циклической походки является синхронизация движений множества отдельных приводов. Динамическая нагрузка на приводы влияет на скорость вращения выходного вала, поэтому опоры в реальных условиях двигаются с разными скоростями. Заданные алгоритмом движения могут отличаться от реальных, что приводит к непредсказуемому поведению машины.
Одной из важных составляющих разработки походки машины является ее тестирование в реальных условиях. Виртуальное моделирование не может полностью имитировать реальную среду, в которой будет работать робот.
Шагающие машины обычно имеют от 4 до 8 подвижных опор. Это дает возможность перемещаться по сложному рельефу. В последнее время растет интерес к шагающим машинам, использующим принцип передвижения насекомых. Основная цель создания машины этого типа – платформа для транспортировки измерительных инструментов и орудий труда для выращивания растений к месту их использования. Инструменты и приборы могут быть закреплены на корпусе машины и питаться как от собст- 82
Том 31, № 1. 2021
венного, так и от бортового источника питания.
Использование роботов становится все более распространенным явлением. Роботы могут применяться для выполнения повторяемых задач, увеличения производительности и др. Колесный транспорт более быстрый, по сравнению с шагающими и гусеничными машинами, но не подходит для передвижения по сложной поверхности. Гусеничные машины медленнее колесных, но больше пригодны для пересеченной местности. Шагающие машины самые медленные и сложные в управлении, но устойчивы на пересеченной местности.
Создание программного обеспечения, позволяющего шагающей машине самостоятельно передвигаться, является сложной задачей. Для движения машины необходимо обрабатывать данные с множества сенсоров. Для исследования движения опытной машины с датчиков собираются более 150 параметров: ориентация корпуса и опор, потребляемые приводами токи, скорости вращения приводов, нагрузки на опоры, контроль температуры приводов и пр. В статье показана опытная шагающая машина и ее устройство. Рассмотрен гибкий алгоритм управления движением опор, позволяющий анализировать данные, поступающие с сенсоров во время работы. Целью статьи является расширение и углубление практических знаний в области проектирования шагающих машин и алгоритмов управления движением.
Обзор литературы
Механика, конструкция, динамика движения шагающих машин изучены достаточно хорошо [1]. Ученые, инженеры и энтузиасты много лет создают математические модели для управления движением частей шагающих машин и манипуляторов и разрабатывают способы их оптимизации [2–4]. Моделируется дина- мика движения и распределение нагрузки на подвижные опоры машин [5–7]. Ведутся исследования в области применения шагающих машин для выращивания растений и автономных машин для сельского хозяйства [8–11]. Шагающие машины находят место в повседневной деятельности человека [12; 13]. Всемирно известная компания Boston Dynamics создает различные типы шагающих машин [14; 15]. Исследователи сталкиваются с проблемами механики, электроники, вопросами сенсоров [16; 17], а также со сложностью алгоритмов управления движением [18–20]. В настоящее время и в нашей стране ведутся научные исследования шагающих машин [21–23]. Они создаются в ФГБОУ ВО «ВолгГТУ» [24]. Прорабатываются вопросы взаимодействия человека с машиной [25]. Создаются модели движения шагающих машин на основе движений насекомых [26; 27].
Шагающие машины на протяжении многих десятилетий не теряют свою актуальность, а современные технологии позволяют создавать новые конструкции машин с цифровым управлением. В приведенной литературе достаточно подробно описаны конструкции и их механические свойства, при этом архитектурным решениям в программном обеспечении не уделено достаточно внимания. Задачей исследования является демонстрация конструкторских решений и алгоритмов, применяемых для управления движением опытной шагающей машины.
Материалы и методы
Движение шагающей машины по сложной неровной поверхности является комплексной задачей для бортовой вычислительной системы. В данной статье рассматриваются способы движения для опытной машины с шестью подвижными опорами (рис. 1).
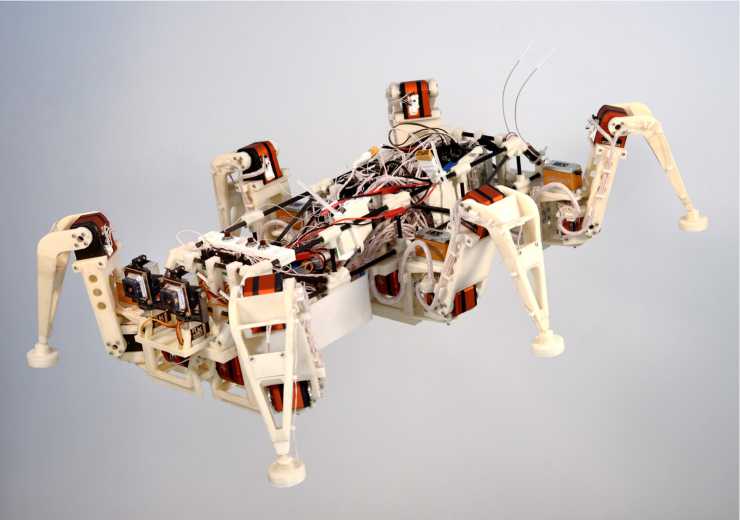
Р и с. 1. Опытная шагающая машина
F i g. 1. Experimental walking machine
Processes and machines of agroengineering systems 83
KTSJ
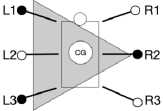
Походка описывается как периодическая последовательность движений с заданным интервалом времени для всех опор машины. Диаграмма цикла перемещения опор показана на рисунке 2. Одной из сложностей циклических походок является синхронизация движения приводов. Динамические нагрузки влияют на неравномерность вращения приводов, поэтому может возникнуть ситуация во время движения, когда одна опора обгоняет другую. Заданное алгоритмом движение опор может отличаться от фактического, что приводит к непредсказуемому движению машины и ее опрокидыванию. Для предотвращения данной ситуации необходимо отслеживать разницу между заданным угловым положением привода и реальным.
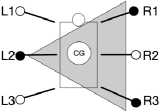
Каждая опора двигается по траектории, показанной на рисунке 3. Обычно траекторию делят на два участка: EA - участок, на котором опора удерживает вес машины; ABCDE – участок переноса опоры в новую позицию. Для
Том 31, № 1. 2021
плавного движения необходимо применять ряд мер для снижения колебаний корпуса и энергозатрат на возвратнопоступательное движение опор. Для этого траектория разбивается на большее число участков. Это позволяет задавать скорость движения для каждого из них. Для моделирования походки траектория движения разбивается на четыре участка: AB , BD , DE и EA. На динамику движения шагающей машины существенное влияние оказывают свойства грунта, которые чрезвычайно разнообразны. Грунт может быть твердым, рыхлым, сыпучим, вязким. Для плавного движения на любых типах грунта значение вертикальной скорости оконечности опоры в момент соприкосновения с поверхностью (участок кривой DE) должно быть минимальным. Также необходимо учитывать деформацию грунта под опорой. Для этого важно точно предсказывать и определять момент времени, когда опора коснется грунта и будет способна нести вес машины (точка E ), а так-
а)

b)

c)
Р и с. 2. Походки: а) трехопорная походка; b) парная походка; c) круговая походка
F i g. 2. Walking gaits: a) tripod gait; b) tetrapod gait; c) circular gait
же корректировать положение опоры при проседании грунта под опорой.
Р и с. 3. Траектория движения опоры
F i g. 3. Leg movement trajectory
Для моделирования движения шагающей машины и экспериментальных исследований был изготовлен стенд, повторяющий все электронные системы машины. Стенд позволяет проводить моделирование движения опоры, проверять конструкционные решения и отлаживать программное обеспечение (рис. 4).
На стенде установлен мини-компьютер Raspberry Pi, импульсный источник питания, преобразователи напряжения, цепи силовой защиты, USB hub для подключения микроконтроллеров, отвечающих за первичную обработку данных с датчиков с последующей передачей в цифровом виде на бортовой компьютер. Датчик тока и напряжения в цепях силовой защиты от замыкания и перенапряжения и высокотоковое реле обеспечивают защиту от перегрузки и короткого замыкания электрической цепи. Одной из важных составляющих стенда является контроллер сервомеханизмов. Контроллер включает в себя датчики тока и аналоговые датчики положения выходного вала привода. На плате установлены переключатели для преобразования входных аналоговых сигналов, что дает возможность при- менять широкий спектр моделей сервомеханизмов с различными значениями сигналов обратной связи по напряжению (рис. 5).
Опора помимо датчиков тока и положения выходного вала каждого привода имеет датчик ориентации в пространстве (акселерометр с гироскопом) и датчик удара и нагружения опоры с регулируемой чувствительностью. Каждый привод имеет датчик температуры для предотвращения его перегрева. На стенде присутствует система синхронизации контроллеров, контроллер приема сигналов с радиопульта управления оператора. Стенд полностью моделирует электронную систему шагающей машины, силовые цепи и бортовую вычислительную систему.
Программное обеспечение спроектировано с применением асинхронных очередей. Каждая очередь команд может выполняться в отдельном потоке. Многопоточный прием данных от множества микроконтроллеров не синхронизирован по времени, маленькие пакеты с данными от микроконтроллеров могут приходить чаще, большие – чуть позже, некоторые могут теряться, или они могут обгонять друг друга. Для решения задачи синхронизации по времени всех датчиков применена аппаратная синхронизация. Все микроконтроллеры подключены к генератору частоты 1 кГц. Микроконтроллеры имеют счетчик синхроимпульсов и функцию синхронного сброса этого счетчика. Показания счетчика содержатся в каждом пакете, переданном на бортовой компьютер. Благодаря этому мы точно знаем момент времени измерения того или иного параметра датчиком.
Каждая опора шагающей машины оснащена датчиком удара и нагружения (рис. 6). Комплекс датчиков позволяет определять касание опорой поверхности и развиваемое при этом усилие.
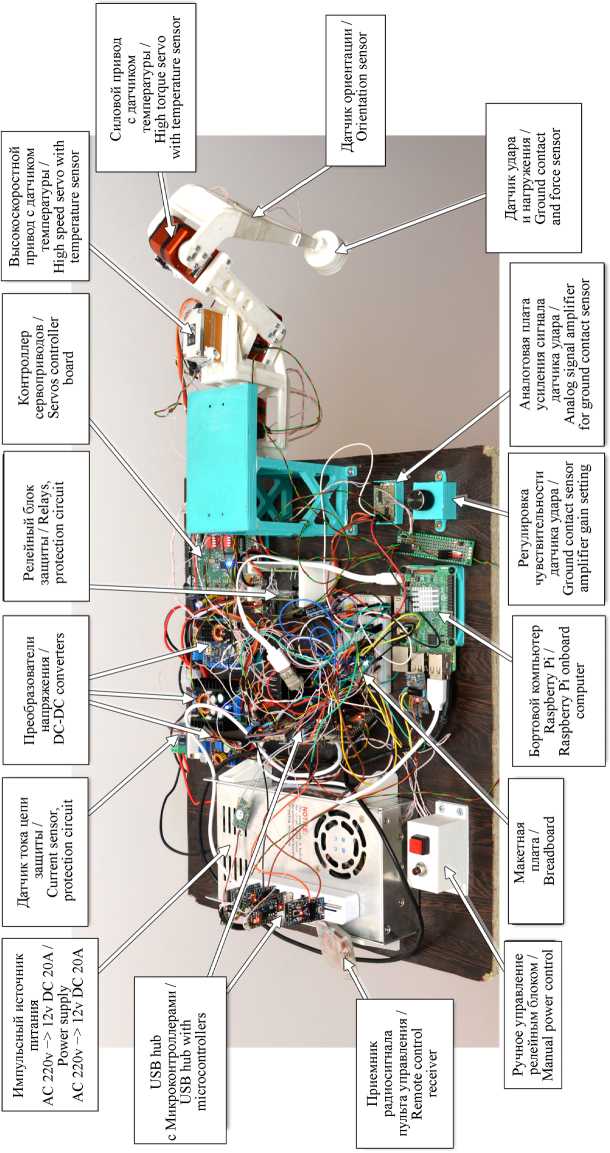
Р и с. 4. Стенд шагающей машины F i g. 4. Walking machine stand
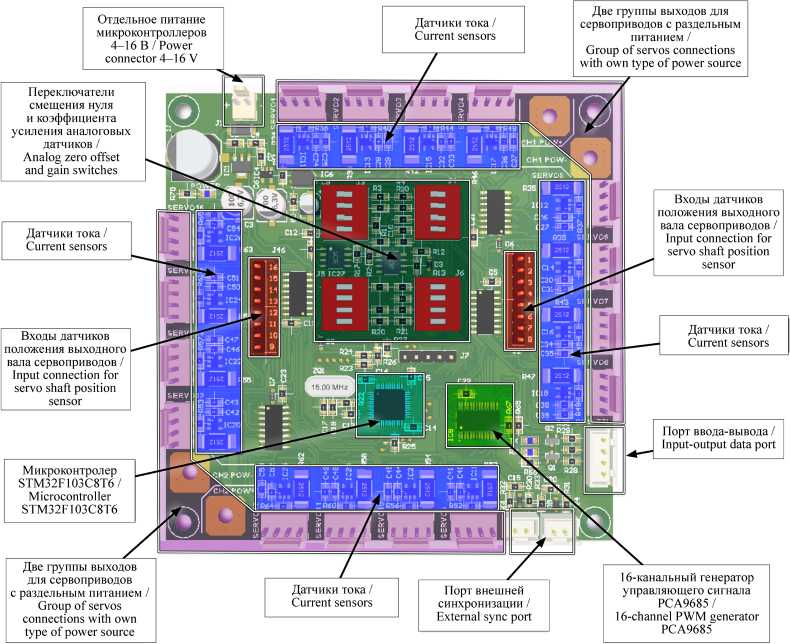
Микроконтролер STM32F103C8T6 / Microcontroller STM32F103C8T6
Две группы выходов для сервоприводов с раздельным питанием / Group of servos connections with own type of power source
Отдельное питание микроконтроллеров 4-16 В / Power connector 4—16 V
Переключатели смещения нуля и коэффициента усиления аналоговых датчиков/ Analog zero offset and gain switches
Две группы выходов для сервоприводов с раздельным питанием / Group of servos connections with own type of power source
16-канальный генератор управляющего сигнала РСА9685 /
16-channel РWM generator PCA9685
Входы датчиков положения выходного вала сервоприводов/ Input connection for servo shaft position sensor
Входы датчиков положения выходного вала сервоприводов/ Input connection for servo shaft position sensor
Порт внешней синхронизации/ External sync port
Датчики тока / Current sensors
Датчики тока / Current sensors
Порт ввода-вывода / Input-output data port
Датчики тока / Current sensors
Датчики тока / Current sensors
Р и с. 5. Контроллер сервоприводов
F i g. 5. Servo controller
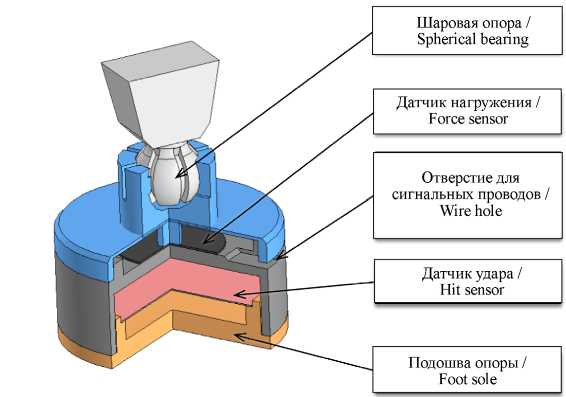
Р и с. 6. Конструкция датчиков на подвижной опоре
F i g. 6. Leg sensors design
Результаты исследования
Каждому отрезку траектории движения кончика опоры задаются интервал времени движения и координата конечной точки. Для движения опоры создается очередь команд, в которую добавляются координаты точек. Опора перемещается по прямой к заданной точке по кратчайшему пути. Во время движения могут проверяться показания датчиков и по их показаниям могут вноситься корректировки движения. Проверки значений производятся при помощи программных функций триггеров. Функция триггера содержит в себе условие срабатывания и вызываемую функцию при соблюдении условия.
Алгоритм вычисления координат положения кончика опоры работает циклически и запускается через заданный интервал времени. Интервал времени зависит от скорости бортового компьютера и скорости обработки команды контроллеров привода. При каждой итерации вычисляется координата кончика опоры, решается задача обратной кинематики, результатом которой являются угловые значения приводов опоры. Проверяется набор триггеров в цикле и, если они сработали, вызываются функции корректировки движения.
Том 31, № 1. 2021
Перемещение опоры в пространстве происходит из текущей точки в заданную. Для этого в массив помещаются координаты движения, интервалы времени и триггеры для каждого из участков движения. Алгоритм циклически забирает из очереди по одной координате, перемещает опору и берет новую точку. В случае, если буфер точек пуст, движение прекращается.
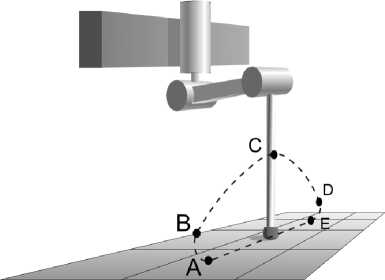
Смоделируем опускание опоры на поверхность. Для этого на стенде изобразим движение опоры по вертикали (рис. 7). Зададим начальное положение опоры в точке C и быстрое движение опоры вниз до точки D . Затем будем опускать опору ниже по траектории DE с малой скоростью. На участке DE необходим триггер, срабатывающий на удар с поверхностью, на нарастание сигнала датчика усилия или резкое увеличение показания датчика ускорения. Для отрыва опоры от поверхности и снижения колебаний корпуса машины необходимо поднимать опору медленно по траектории ED . На данном участке траектории движения необходим триггер снятия нагрузки с опоры. Как только нагрузка уменьшится, можно ускорить движение опоры к точке С .
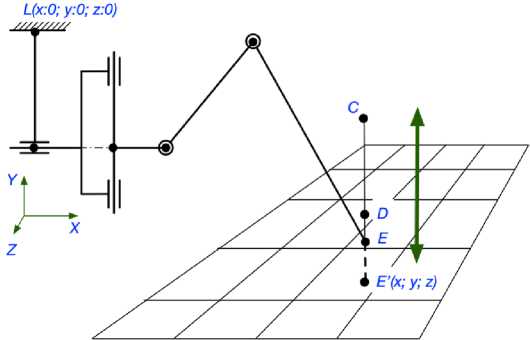
Р и с. 7. Моделирование опускания опоры на поверхность
F i g. 7. Simulation of support lowering to the surface
Vol. 31, no. 1. 2021
Для триггеров крайне важна временная метка в пакетах данных, полученных от сенсоров. Поскольку сенсоры могут иметь ложное срабатывание при движении на каждом из участков траектории, необходимо уменьшить интервал времени выборки данных. Данные с каждого сенсора хранятся некоторое время в памяти и представляют собой буфер значений за небольшой промежуток времени от долей до нескольких секунд. Триггер может сделать выборку данных с любого из сенсоров за заданный промежуток времени и вернуть значение срабатывания.
Поскольку скорость вращения выходного вала у приводов непостоянная и зависит от ряда причин (напряжения питания, переменной нагрузки на выходном валу и т. д), то интервалы времени для движения шагающей машины можно определить опытным путем. Практика показала, что возможно создать математическую модель автоматической корректировки интервалов времени для оптимизации движения машины.
Переход моделирования движения от одноногого на стенде к многоногому требует доработок описанного выше алгоритма. Для упрощения примем, что машина движется по ровной, плоской горизонтальной поверхности прямолинейно. Ориентация корпуса задается тремя углами Эйлера. Также задается высота дорожного просвета, ширина колеи и база. Опоры имеют три типа движения: подъем-опускание опоры, движение кончика в горизонтальной плоскости и изменение координаты положения корпуса в пространстве. Траектория движения опор состоит из множества точек кончиков опор и имеют циклический вид. Для задания движения необходимо определить тип походки.
Программное обеспечение и его архитектурные решения
Для движения шагающей машины необходим алгоритм, вычисляющий угловое положение каждого привода машины в заданный момент времени. При этом нужно обрабатывать поступающие сигналы с датчиков и реагировать на их изменение. Для простого программирования траектории движения создан алгоритм. Для каждой опоры формируется массив-очередь с координатами точек, каждый элемент которой содержит: время передвижения до точки; координату точки в пространстве ( x , y , z ); массив функций триггеров; функцию, которая вызывается в момент достижения точки кончиком опоры.
Алгоритм поочередно берет элементы очереди и обрабатывает их в цикле (рис. 8). Каждая итерация цикла вычисляет текущее время. Зная начальную точку, время движения и конечную точку, можно вычислить промежуточную точку, в которой должен находиться кончик опоры по формуле. Формула для координат y и z вычисляется аналогичным способом. Таким образом, для X 1 > X 2 функция будет иметь вид: ЛX ! , X 2 , t ) = X ! - |X ! - X 2 1 • t ; а для случая, когда X 1 < X 2 , функция будет иметь вид: fX„ X 2 , t ) = X , + |X , - X 2 | • t , при t = [0…1].
Во время движения может возникнуть необходимость проверять значения датчиков. Примером такой необходимости служит участок траектории DE (рис. 3). При движении опоры на данном участке необходимо проверять значение весового датчика. Если его показания увеличились, значит опора достигла поверхности земли и способна нести вес корпуса. При срабатывании заданного условия можно вызвать какую-нибудь функцию, например зажечь лампочку, показывающую срабатывание датчика веса, добавить задержку выполнения команд или перейти к следующей точке траектории. Данное архитектурное
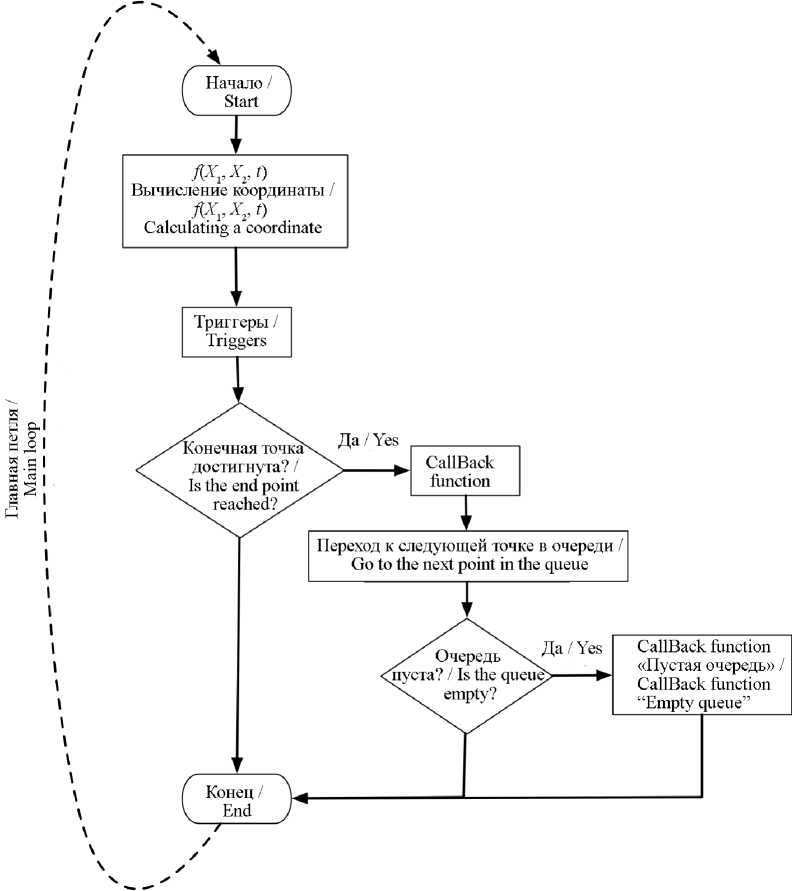
Р и с. 8. Циклический алгоритм движения опоры
F i g. 8. Cyclic algorithm of the leg movement
решение в построении алгоритма позволяет легко создавать стандартные цепочки координат движения машины.
Для движения одной опоры по диаграмме на рисунке 3 необходимо запрограммировать цепочку точек с координатами и набором триггеров (рис. 9). Для движения из точки A в точку B не- 90
обходимо определить момент времени, когда опора приподнимется над поверхностью и ее подъем можно продолжить с большей скоростью на участке BC . Аналогично для опускания опоры. На участке траектории CD опора опускается с большой скоростью, а на участке DE скорость опускания снижается.
Процессы и машины агроинженерных систем
Триггер на участке DE срабатывает, когда датчик нагружения будет выдавать заданную нагрузку. Результатом срабатывания триггера является прекращение дальнейшего опускания опоры и переход к следующей точке движения.
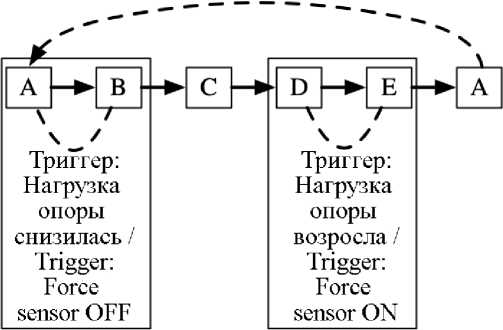
Р и с. 9. Цепочка из точек для движения одной опоры
F i g. 9. Points chain for the leg movement
Для одной опоры на стенде алгоритм показал хорошие результаты. Перенос данного алгоритма на многоногую систему потребовал добавления новых функций синхронизации. Поскольку опоры движутся с разными скоростями и поверхность под машиной может быть неровной, то программный код некоторых цепочек из точек будет выполняться быстрее, что при увеличении числа циклов приведет к хаотичному движению опор и машина перестанет двигаться. Временная диаграмма цепочки вершин без синхронизации представлена на рисунке 10.
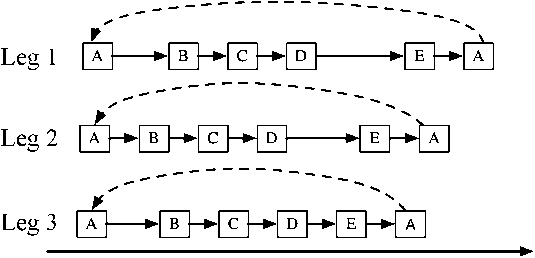
Время, с / Time, s
Р и с. 10. Асинхронное движение опоры
F i g. 10. Asynchronous motion of the leg
Поскольку общая продолжительность цикла может меняться, а для движения необходимо одинаковое время нескольких циклов, без синхронизации не обойтись. В алгоритм, показанный на рисунке 8, легко добавить функцию синхронизации при переходе к новой вершине или в триггер, который может изменять скорость движения в режиме реального времени.
В процессе исследования были определены оптимальные временные интервалы и скорости движения опоры на каждом из участков кривой, показанной на рисунке 3. Смоделировано движение на участке касания опорой поверхности DE . По алгоритму, показанному на рисунке 8, для замедления движения, остановки опускания опоры использовались программные триггеры.
В ходе моделирования на стенде опора двигалась со скоростью 20 мм/с, в момент срабатывания датчика удара скорость движения снижалась до 5 мм/с. После остановки опускания опоры и задержки в 0,4 с опора поднималась со скоростью 5 мм/с. На участке подъема AB (рис. 3) также использовался триггер, срабатывающий на снижение значения датчика нагружения, что ускоряло движение подъема опоры до скорости 20 мм/с. Была получена осциллограмма срабатывания датчиков касания (рис. 11).
Практические эксперименты показали гибкость предложенного на рисунках 8 и 9 алгоритма программирования движения опоры. Он может быть применен для множества манипуляторов или машин с числовым управлением.
Обсуждение и заключение
В ходе исследования был изготовлен стенд, моделирующий движение опоры шагающей машины с динамической устойчивостью. Разработан алгоритм движения опоры с реакцией на изменение показаний датчиков. Проведенные исследования позволили полу-
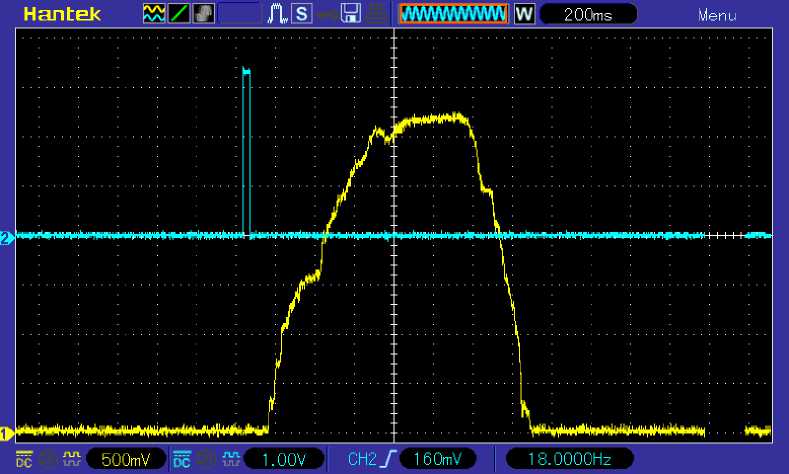
Р и с. 11. Осциллограмма сигналов с датчика удара и датчика нагружения опоры: голубой импульс – датчик удара; желтый импульс – датчик нагружения
F i g. 11. Oscillogram of signals from the shock and the load cell sensor: blue pulse – shock sensor; yellow pulse – load sensor чить оптимальную алгоритмическую модель движения, к которой легко добавлять новые реакции автоматической системы управления движением, основанные на показаниях датчиков. Созданная модель позволяет определить оптимальные временные интервалы для каждого участка кривой траектории движения опоры. Дальнейшая работа в направлении расширения функционала модели позволит создать комплексную автоматическую систему управления движением шагающей машины, основанную на реагировании на изменения показаний сенсорной системы.
Поступила 09.10.2020; одобрена после рецензирования 20.12.2020; принята к публикации 15.01.2021
Все авторы прочитали и одобрили окончательный вариант рукописи.
94 Процессы и машины агроинженерных систем
shore and Arctic Engineering, 19-24 June 2016. Busan: ASME; 2016. Pp. 9. (In Eng.) DOI: https:// doi.org/10.1115/OMAE2016-54440
Submitted 09.10.2020; approved after reviewing 20.12.2020; accepted for publication 15.01.2021
All authors have read and approved the final manuscript.
Список литературы Моделирование движения опоры шагающей машины с динамической устойчивостью при помощи стенда
- Optimal Force Distribution for the Legs of an Hexapod Robot / C. Mahfoudi, K. Djouani, S. Rechak, M. Bouaziz. - DOI 10.1109/CCA.2003.1223515 // Proceedings of 2003 IEEE Conference on Control Applications, 23-25 June 2003, Instambul. - Instambul : IEEE, 2003. - Pp. 657-663. - URL: https:// ieeexplore.ieee.org/document/1223515/metrics#metrics (дата обращения: 02.02.2021).
- Hayward, V. Robot Manipulator Control under Unix RCCL: A Robot Control "C" Library / V. Hayward, R. P. Paul. - DOI 10.1177/027836498600500407 // The International Journal of Robotics Research. - 1986. - Vol. 5, Issue 4. - Pp. 94-111. - URL: https://journals.sagepub.com/ doi/10.1177/027836498600500407 (дата обращения: 02.02.2021).
- Paul, R. P. Kinematics of Robot Wrists / R. P. Paul, C. N. Stevenson. - DOI 10.1177/027836498300200103 // The International Journal of Robotics Research. - 1983. - Vol. 2, Issue 1. - Pp. 31-38. - URL: https://journals.sagepub.com/doi/10.1177/027836498300200103 (дата обращения: 02.02.2021).
- Pfeiffer, F. Six-Legged Technical Walking Considering Biological Principles / F. Pfeiffer, J. Eltze, H.-J. Weidemann. - DOI 10.1016/0921-8890(94)00031-V // Robotics and Autonomous Systems. - 1995. - Vol. 14, Issue 1-2. - Pp. 223-232. - URL: https://www.sciencedirect.com/science/article/ pii/092188909400031V?via%3Dihub (дата обращения: 02.02.2021).
- Roennau, A. Design and Kinematics of a Biologically-Inspired Leg for a Six-Legged Walking Machine / A. Roennau, T. Kerscher, R. Dillmann. - DOI 10.1109/BIOROB.2010.5626328 // Proceedings of 3rd IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), 26-29 September 2010, Tokyo. - Tokyo : IEEE, 2010. - URL: https://ieeexplore.ieee.org/ document/5626328 (дата обращения: 02.02.2021).
- Optimal Force Distribution for the Legs of a Quadruped Robot / X. Chen, K. Watanabe, K. Kiguchi, K. Izumi // Machine Intelligence & Robotic Control. - 1999. - Vol. 1, Issue 2. - Pp. 87-94. - URL: http:// www.cyber-s.ne.jp/Top/Volume/1-2/0009tc.pdf (дата обращения: 02.02.2021).
- Nahon, M. A. Optimization of Dynamic Forces in Mechanical Hands / M. A. Nahon, J. Angeles. -DOI 10.1115/1.2912765 // Journal ofMechanical Design. - 1999. - Vol. 113. Issue 2. - Pp. 167-173. - URL: https://asmedigitalcollection.asme.org/mechanicaldesign/article-abstract/113/2/167/417367/Optimization-of-Dynamic-Forces-in-Mechanical-Hands?redirectedFrom=fulltext (дата обращения: 02.02.2021).
- Gardner, J. F. Force Distribution in Walking Machines Over Rough Terrain / J. F. Gardner. - DOI 10.1115/1.2896488 // Journal of Dynamic Systems, Measurement and Control. - 1991. - Vol. 113, Issue 4. - Pp. 754-758. - URL: https://asmedigitalcollection.asme.org/ dynamicsystems/article-abstract/113/4/754/417104/Force-Distribution-in-Walking-Machines-Over-Rough?redirectedFrom=fulltext (дата обращения: 02.02.2021).
- Tedeschi, F. Design Issues for Hexapod Walking Robots / F. Tedeschi, G. Carbone. - DOI 10.3390/ robotics3020181 // Robotics. - 2014. - Vol. 3, Issue 2. - Pp. 181-206. - URL: https://www.mdpi.com/2218-6581/3/2/181 (дата обращения: 02.02.2021).
- Robots in Agriculture: State of Art and Practical Experiences / J. J. Roldán, J. Cerro, D. Garzón-Ramos [et al.]. - DOI 10.5772/intechopen.69874 // Service Robots ; A. Neves, ed. - IntechOpen, 2018. -URL: https://www.intechopen.com/books/service-robots/robots-in-agriculture-state-of-art-and-practical-experiences (дата обращения: 02.02.2021).
- Kang, D. The Walking Control of a Hexapod Robot for Collecting Field Information / D. Kang, M. Iida, M. Umeda. - DOI 10.11357/jsam.71.1_63 // Journal of the Japanese Society of Agricultural Machinery. - 2009. - Vol. 71, Issue 1. - Pp. 163-171. - URL: https://www.jstage.jst.go.jp/article/ jsam/71/1/71_1_1_63/_article/-char/ja/ (дата обращения: 02.02.2021).
- Design and Implementation of Bio Inspired Hexapod for Exploration Applications / T. Deepa, S. Angalaeswari, D. Subbulekshmi [et al.]. - DOI 10.1016/j.matpr.2020.07.165 // Materials Today: Proceedings. - 2020. - 5 p. - URL: https://www.sciencedirect.com/science/article/pii/ S2214785320352585?via%3Dihub (дата обращения: 02.02.2021).
- Nemoto, T. Energy-Based Control for a Biologically Inspired Hexapod Robot with Rolling Locomotion / T. Nemoto, R. E. Mohan, M. Iwase. - DOI 10.1016/j.dcan.2015.04.001 // Digital Communications and Networks. - 2015. - Vol. 1, Issue 2. - Pp. 125-133. - URL: https://www. sciencedirect.com/science/article/pii/S2352864815000139?via%3Dihub (дата обращения: 02.02.2021).
- Carbone, G. Legged Robotic Systems / G. Carbone, M. Ceccarelli. - DOI 10.5772/4669 // Cutting Edge Robotics ; V. Kordic, ed. - IntechOpen, 2005. - 26 p. - URL: https://www.intechopen.com/books/ cutting_edge_robotics/legged_robotic_systems (дата обращения: 02.02.2021).
- BigDog, the Rough-Terrain Quadruped Robot / M. Raibert, K. Blankespoor, G. Nelson, R. Playter. - DOI 10.3182/20080706-5-KR-1001.01833 // IFAC Proceedings Volumes. - 2008. -Vol. 41, Issue 2. - Pp. 10822-10825. - URL: https://www.sciencedirect.com/science/article/pii/ S1474667016407020?via%3Dihub (дата обращения: 02.02.2021).
- Sparrow, R. Kicking a Robot Dog / R. Sparrow. - DOI 10.1109/HRI.2016.7451756 // Proceedings of 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2016. - Christchurch : IEEE, 2016. - Pp. 229. - URL: https://ieeexplore.ieee.org/document/7451756/authors#authors (дата обращения: 02.02.2021).
- Manoiu-Olaru, S. Hexapod Robot. Mathematical Support for Modeling and Control / S. Manoiu-Olaru, M. Nitulescu, S. Viorel // Proceedings of 15th International Conference on System Theory, Control and Computing, 1-6 Oct 2011. - Sinaia : IEEE, 2011. - 6 p. - URL: https://ieeexplore.ieee.org/ document/6085694/authors#authors (дата обращения: 02.02.2021).
- Fucek, L. Analytically Founded Yaw Control Algorithm for Walking on Uneven Terrain Applied to a Hexapod Robot / L. Fucek, Z. Kovacic, S. Bogdan. - DOI 10.1177/1729881419857997 // International Journal of Advanced Robotic Systems. - 2019. - 17 p. - URL: https://journals.sagepub.com/ doi/10.1177/1729881419857997 (дата обращения: 02.02.2021).
- Design and Underwater Tests of Subsea Walking Hexapod MAK-1 / V. V. Chernyshev, V. V. Arykantsev, A. E. Gavrilov [et al.]. - DOI 10.1115/0MAE2016-54440 // Proceedings of ASME 35th International Conference on Ocean, Offshore and Arctic Engineering, 19-24 June 2016. - Busan : ASME, 2016. - Pp. 9. - URL: https://asmedigitalcollection.asme.org/OMAE/proceedings-abstract/ 0MAE2016/49989/V007T06A023/281002 (дата обращения: 02.02.2021).
- Петров, Н. В. Разработка учебного шагающего мобильного робота / Н. В. Петров // Политехнический молодежный журнал. - 2019. - № 9 (38). - 13 с. - URL: http://ptsj.ru/articles/520/520.pdf (дата обращения: 02.02.2021). - Рез. англ.
- Gait Control by Genetic Algorithm for Agricultural Hexapod Walking Robot / M. Dohi, T. Fujiura, N. Ishizuka, K. Nonami. - DOI 10.1016/S1474-6670(17)36757-5 // IFAC Proceedings Volume. -2000. - Vol. 33, Issue 29. - Pp. 89-93. - URL: https://www.sciencedirect.com/science/article/pii/ S1474667017367575?via%3Dihub#! (дата обращения: 02.02.2021).
- Алейников, Ю. Г. Цифровые технологии для роботизированных технических средств в сельско-хозяйственном производстве на примере шагающей машины и робота для внесения три-хограммы в теплице / Ю. Г. Алейников // Инновации в сельском хозяйстве. - 2019. - № 1 (30). -С. 283-293. - URL: http://journal.viesh.ru/wp-content/uploads/2019/04/ИННОВСХ-30-2019.pdf (дата обращения: 02.02.2021). - Рез. англ.
- Алейников, Ю. Г. Надежное определение момента времени касания опорой поверхности шагающей машины / Ю. Г. Алейников, Я. Г. Митягина. - DOI 10.34286/1995-4646-2019-67-4-60-68 // Международный технико-экономический журнал. - 2019. - № 4. - С. 60-68. - URL: http://www.tite-journal.com/content/2019/vypusk-no4/ (дата обращения: 02.02.2021). - Рез. англ.
- Алейников, Ю. Г. Система управления движением шагающей машины / Ю. Г. Алейников, Я. Г. Митягина // Международный технико-экономический журнал. - 2018. - № 4. - С. 90-95. - URL: http://www.tite-journal.com/content/2018/vypusk-no4/#c11567 (дата обращения: 02.02.2021). - Рез. англ.
- Чернышев, В. В. Полевые исследования шагающих машин / В. В. Чернышев // Тракторы и сельскохозяйственные машины. - 2004. - № 4. - С. 20-22. - URL: http://www.avtomash.ru/ gur/2004/200404.htm (дата обращения: 02.02.2021).
- Murphy, R. R. Human-Robot Interaction in Rescue Robotics / R. R. Murphy. - DOI 10.1109/ TSMCC.2004.826267 // IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews). - 2004. - Vol. 34, Issue 2. - Pp. 138-153. - URL: https://ieeexplore.ieee.org/xpl/RecentIssue. jsp?punumber=5326 (дата обращения: 02.02.2021).
- Locomotion Analysis of Hexapod Robot / X. Ding, Z. Wang, A. Rovetta, J. M. Zhu. - DOI 10.5772/8822 // Climbing and Walking Robots ; B. Miripour-Fard, ed. - IntechOpen, 2010. - URL: https:// www.intechopen.com/books/climbing-and-walking-robots/locomotion-analysis-of-hexapod-robot (дата обращения: 02.02.2021).
