Моделирование движения танкера на нефтяном терминале в открытом море при управлении на перекрестии

Автор: Петров Сергей Олегович, Юдин Юрий Иванович, Холичев Сергей Николаевич
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Рубрика: Транспорт
Статья в выпуске: 1 т.18, 2015 года.
Бесплатный доступ
Рассмотрен процесс моделирования движения танкера во время выполнения операций по погрузке нефти и нефтепродуктов на терминале, находящемся в открытом море, при использовании инновационного способа управления на перекрестии.
Перекрестие, инновационный способ, управление движением танкера
Короткий адрес: https://sciup.org/14294773
IDR: 14294773 | УДК: 656.614.3.073.23
Modeling of tanker movement at the oil terminal in the high seas at crosshair management
The process of modeling of tanker movement during cargo operations at the oil terminal in the high seas has been considered. An innovative method of crosshair management has been used.
Текст научной статьи Моделирование движения танкера на нефтяном терминале в открытом море при управлении на перекрестии
Процесс моделирования сложного маневрирования танкера на перекрестии во время выполнения операций по погрузке нефти и нефтепродуктов на терминале, находящемся в открытом море, реализуется с использованием математически идентифицированной модели танкера.
2. Реализация моделирования
Проведем ряд модельных испытаний функционирующей системы управления по двум парам отклонений от ортогональной системы координат. Будем перемещать само перекрестие, а с ним и систему координат. Данная стратегия управления сложнее маневрирования на терминале, но служит хорошей демонстрацией возможностей моделирующей системы.
Пусть цель-перекрестие движется в заданном направлении (330°) с заданной скоростью (0.3 уз). Начальная скорость танкера 0.5 уз, курс 60°. Наблюдение за танкером ведется на протяжении 6 000 с. Параметры системы управления маневрированием а 1 , а 2 и а 3 указаны:
-
– в законе управления упором главного движителя:
Тe = (kWномP%/ v)A, где А = 1 / (а3Lw); Р% – процент загрузки главного движителя;
-
– законе управления тягами подруливающих устройств:
ТeprF = [ a 2 ( dyA – dyF ) + a 1 ( dyA + dyF ) xA ] /( xF – xA ),
ТeprA = [– a 2 ( dyA – dyF ) + a 1 ( dyA + dyF ) xF ] /( xF – xA ), где a 1 = –25; a 2 = 2250.
Данные параметры можно изменять и тем самым подбирать их оптимальные значения, способствующие достижению минимального уровня качества управления:
t
Q 1 r 2 dt .
t 0
Разработанная программа моделирования позволяет детально проследить за изменением всех характеристик маневрирования (рис. 1). На траектории танкера синим кружком обозначен сам танкер, цветная прямая отражает линию движения цели, красный кружок – перекрестие. Скриншот получен на 1 325 с маневрирования; на нем видно начальное значительное отклонение от цели, которое затем убывает в процессе управления танкером.
Покажем изменения всех сопутствующих движению параметров:
-
– тяги Te и процента загрузки P % главного движителя (рис. 2);
-
– курса т, угловой скорости (О и угла дрейфа ₽ (рис. 3);
-
– тяги носового TeprF и кормового TeprA ПУ и их результирующего момента Mpr (рис. 4);
-
– продольной ( vx ) и поперечной ( vy ) скорости и отклонений носовой ( dxF , dyF ) и кормовой ( dxA , dyA ) точек ( Юдин и др. , 2013) от координатных осей перекрестия (рис. 5).
Петров С.О. и др. Моделирование движения танкера…
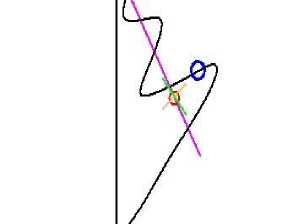
Рис. 1. Траектория движения танкера при управлении на перекрестии. Перекрестие движется линейно
Для всех показателей характерны периодические изменения с постепенным уменьшением амплитуд колебаний. В итоге наблюдаются примерно стационарные колебания, которые вызваны естественным перерегулированием параметров а 1 , а 2 и а 3 , указанных в таблице.
|
а 1 |
а 2 |
а 3 |
Q |
|
–25 |
2 000 |
50 |
0.0118 |
|
–25 |
3 000 |
50 |
0.0113 |
|
–20 |
3 000 |
50 |
0.0108 |
|
–20 |
2 000 |
50 |
0.0122 |
|
–15 |
3 500 |
50 |
0.0112 |
|
–18 |
3 300 |
50 |
0.0108 |
|
–18 |
3 300 |
30 |
0.0110 |
|
–18 |
3 300 |
70 |
0.0105 |
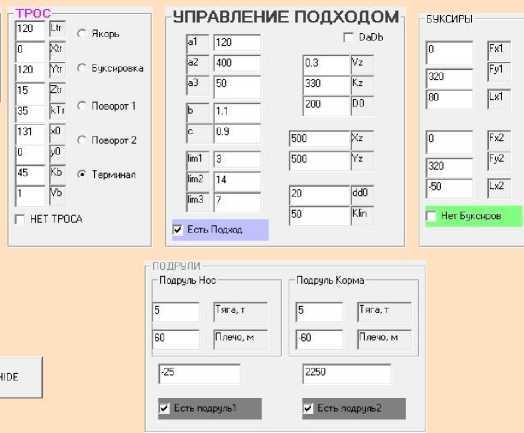
Для оптимизации управления меняем в программной форме (рис. 6) значения параметров а 1 , а 2 , а 3 и каждый раз запускаем процесс выполнения маневрирования. После завершения испытаний запрашиваем качество управления Q и фиксируем его в таблице. В ходе простого сравнения перебранных комплексов трех параметров выбираем заключительный вариант: а 1 = –18, а 2 = 3300, а 3 = 70. Эта комбинация параметров показывает минимальное значение качества управления Q = 0.0105.
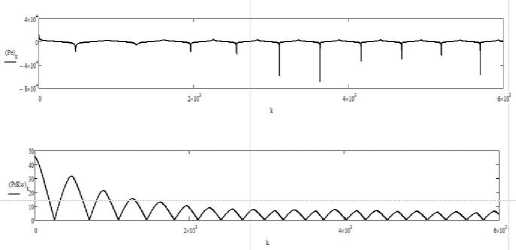
Рис. 2. Изменение тяги и процента загрузки главного движителя. Движение цели линейное
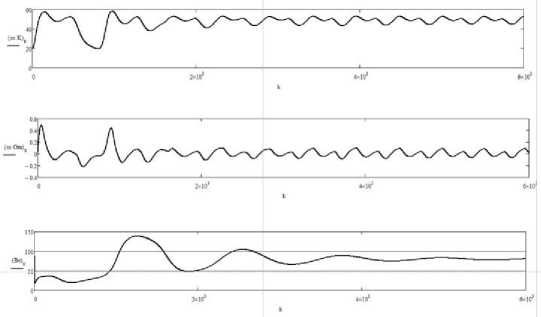
Рис. 3. Изменение курса, град, угловой скорости, град/с, и угла дрейфа, град. Движение цели линейное
Вестник МГТУ, том 18, № 1, 2015 г. стр. 25-32
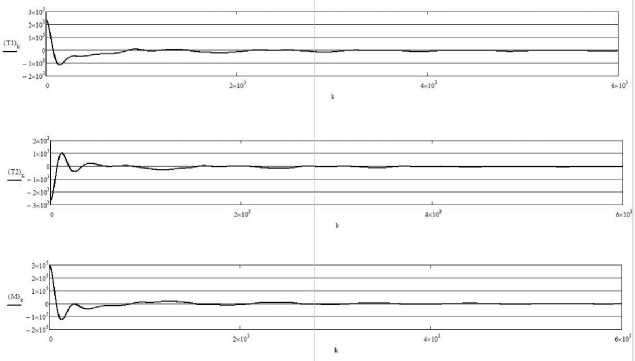
Рис. 4. Изменение тяги носового и кормового ПУ, кН, и их результирующего момента, кНм. Движение цели линейное
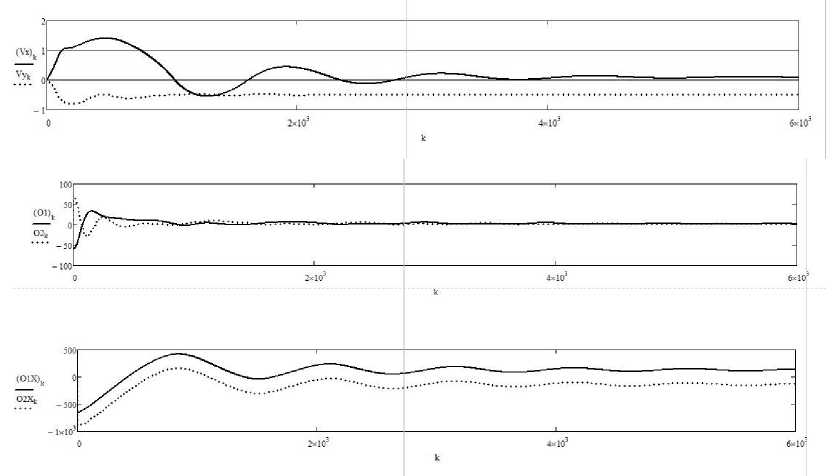
Рис. 5. Изменение продольной и поперечной скоростей танкера, м/с, отклонений его носовой и кормовой точек, м, от координатных осей перекрестия. Движение цели линейное
ТРОС
Якорь
Буксировка
Поворот 1
Поворот 2
КЬ
Т ерминал
Г" Нет Буксиров
Г НЕТ ТРОСА
{v Есть Подкод
V Есть подруль!
v Есть подруль2
120 т¥
Рис. 6. Часть программной формы для задания параметров управления
УПРАВЛЕНИЕ
|
а1 |
120 |
|
а2 |
400 |
|
аЗ |
50 |
|
Ь |
1.1 |
ПОДХОДОМ
|
0.3 |
Vz |
|
330 |
Kz |
|
200 |
DO |
Г-ПОДРУЛИ
|
П одру ль Нос |
Подру ль Корма |
||
|
5 |
|Тяга,т |
5 |
|Тяга,т |
|
60 |
|Плечо, м |
60 |
|Плечо, м |
Петров С.О. и др. Моделирование движения танкера…
Траектория маневрирования изменяется незначительно, что способствует небольшому изменению качества управления Q ( Юдин , Пашенцев , 2012). На рис. 7 показаны траектории, соответствующие трем различным комбинациям управляющих параметров (обозначения те же, что и на рис. 1).
Линейно удаляющаяся цель-перекрестие не имеет прямого отношения к задаче маневрирования танкера на терминале, но показывает возможности предложенного способа управления и мощность программной системы моделирования.
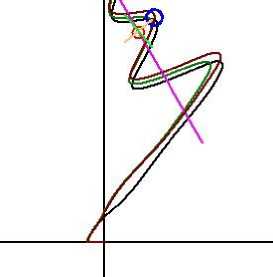
Рис. 7. Изменения траектории при вариации параметров управления
Рассмотрим задачу моделирования процесса маневрирования танкера, когда цель совершает колебательные движения вокруг неподвижной точки.
Аналитически данное движение представим в виде
X z = A sin(2 π t / T 1 ), Y z = B cos(2 π t / T 2 ).
Графические траектории такого движения являются фигурами Лиссажу и при разных комбинациях амплитуд А , В и периодов Т 1 , Т 2 могут быть весьма причудливыми. Приведем результаты модельных испытаний двух случаев маневрирования с одинаковыми амплитудами, равными 5 и 12 м, и на порядок отличающимися частотами. В первом испытании учитывались периоды Т 1 = 10 c, Т 2 = 6 с, во втором – Т 1 = 100 с, Т 2 = 60 с. Заметим, что система управления выполнила в обоих случаях главную задачу – не уходить от центра колебаний, однако частотные характеристики основных параметров маневрирования при этом различны, как это и должно быть по существу задачи. Ниже приведем в графической форме те же характеристики маневрирования, которые представлены на рис. 1-5. Так, на рис. 8-12 приведены результаты для периодов колебания цели Т 1 = 10 с, Т 2 = 6 с, на рис. 13-17 – результаты для периодов Т 1 = 100 с, Т 2 = 60 с.
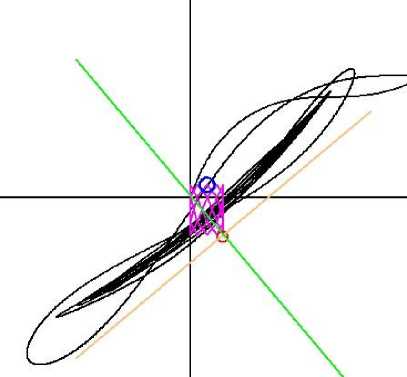
Рис. 8. Траектория управляемого танкера при движении на перекрестии, колеблющемся с осевыми периодами Т 1 = 10 с, Т 2 = 6 с ( Q 1 = 0.0137)
Движения перекрестия-цели быстрые, так как периоды осевых колебаний малы. Особо следует обратить внимание на изменение угла дрейфа танкера (рис. 10, внизу). Дело в том, что при выбранной системе управления часть времени маневрирования танкер движется задним ходом, что приводит к
Вестник МГТУ, том 18, № 1, 2015 г. стр. 25-32
изменению угла дрейфа почти на 180°. Именно это обстоятельство отражают вертикальные линии на графиках угла дрейфа. Как известно, любое судно, тем более тяжелый танкер, является фильтром высоких частот. Поэтому курс и угловая скорость (рис. 10) затухают со временем после начального переходного процесса.
Эффект фильтрации виден и на примере качества управления. Так, при высокочастотном режиме Q 1 = 0.0137, а при низкочастотном – Q 2 = 0.0425. Система управления не реагировала на малые высокочастотные отклонения, что и привело к хорошему показателю качества ( Q 1 существенно меньше Q 2 ).
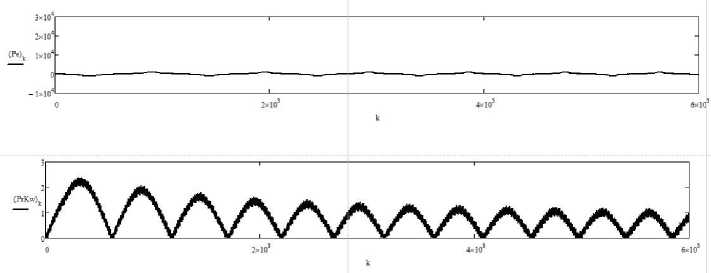
Рис. 9. Изменение тяги и процента загрузки главного движителя. Перекрестие цели колеблется с осевыми периодами Т 1 = 10 с, Т 2 = 6 с
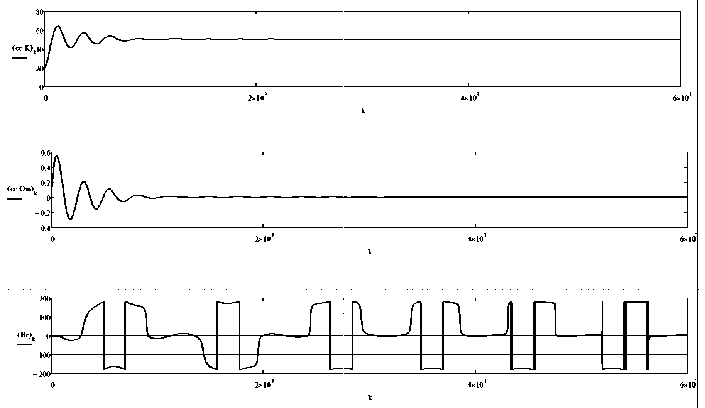
Рис. 10. Изменение курса, угловой скорости и угла дрейфа танкера. Перекрестие цели колеблется с осевыми периодами Т 1 = 10 c, Т 2 = 6 с
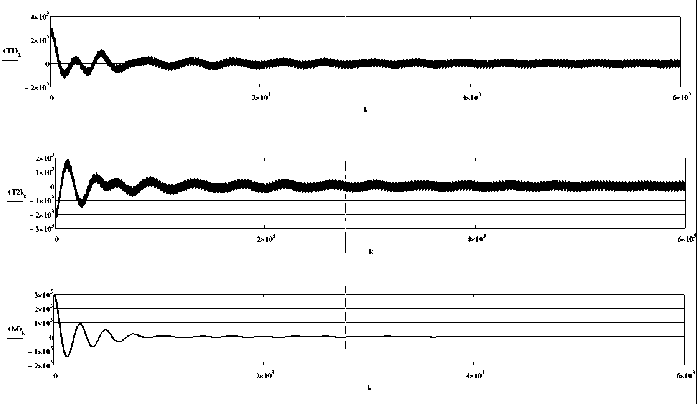
Рис. 11. Изменение тяг носового и кормового ПУ и их результирующего момента. Перекрестие цели колеблется с осевыми периодами Т 1 = 10 c, Т 2 = 6 с
Петров С.О. и др. Моделирование движения танкера…
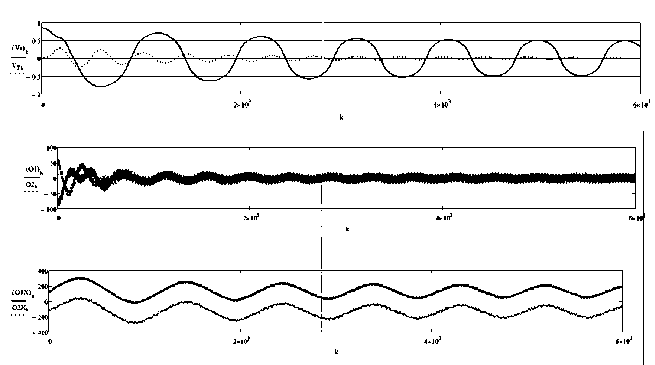
Рис. 12. Изменение продольной и поперечной скоростей танкера и отклонений его носовой и кормовой точек от координатных осей перекрестия.
Перекрестие цели колеблется с осевыми периодами Т 1 = 10 c, Т 2 = 6 с
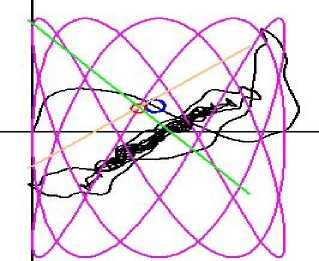
Рис. 13. Траектория движения танкера при управлении на перекрестии. Перекрестие колеблется с осевыми периодами Т 1 = 100 c, Т 2 = 60 с ( Q 1 = 0.0425).
Движения цели-перекрестия медленные, так как периоды значительны
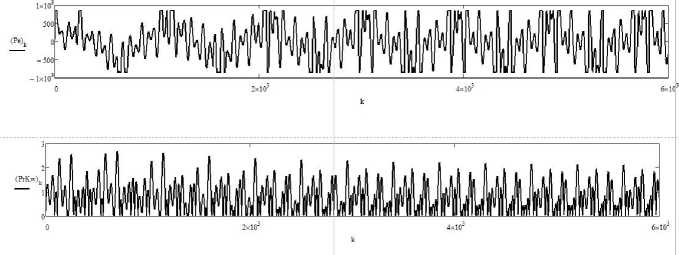
Рис. 14. Изменение тяги и процента загрузки главного движителя. Перекрестие цели колеблется с осевыми частотами Т 1 = 100 с, Т 2 = 60 с
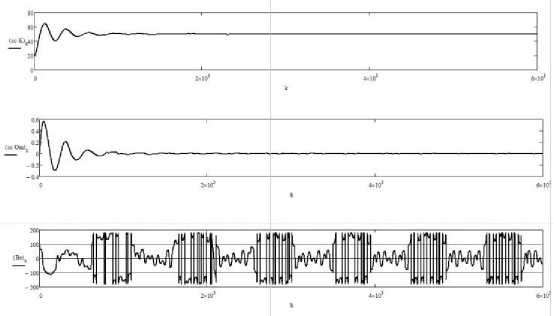
Рис. 15. Изменение курса, угловой скорости и угла дрейфа танкера. Перекрестие цели колеблется с осевыми периодами Т 1 = 100 c, Т 2 = 60 с
Вестник МГТУ, том 18, № 1, 2015 г. стр. 25-32
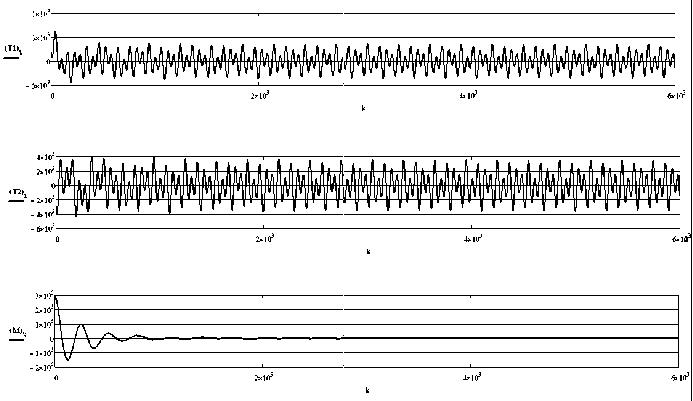
Рис. 16. Изменение тяг носового и кормового ПУ и их результирующего момента. Перекрестие цели колеблется с осевыми периодами Т 1 = 100 c, Т 2 = 60 с

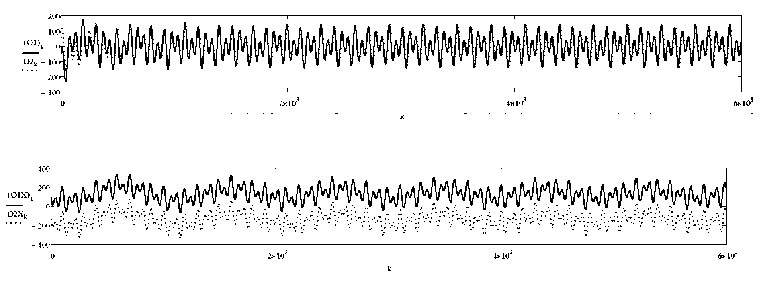
Рис. 17. Изменение продольной и поперечной скоростей танкера и отклонений его носовой и кормовой точек от координатных осей перекрестия.
Перекрестие цели колеблется с осевыми периодами Т 1 = 100 c, Т 2 = 60 с
3. Заключение
В статье показан процесс моделирования инновационной стратегии управления движением танкера на перекрестии во время выполнения операций по погрузке нефти и нефтепродуктов на терминале, находящемся в открытом море. Моделирование осуществлялось с целью решения задач сложного маневрирования с использованием параметрически идентифицированной математической модели танкера.
Список литературы Моделирование движения танкера на нефтяном терминале в открытом море при управлении на перекрестии
- Юдин Ю.И., Пашенцев С.В. Моделирование управляемого движения судна по произвольной траектории. Эксплуатация водного транспорта: ежекварт. сб. науч. ст. СПб., ГМА им. адм. С.О. Макарова, 2012. Вып. 3 (69). С. 32-36
- Юдин Ю.И., Петров С.О., Холичев С.Н. Способ управления траекторией движения судна. Пат. 2501064 РФ, МПК В 63 Н 25/52 (2006.01); заявитель и патентообладатель Мурман. госуд. техн. ун-т, № 2012108992/11; заявл. 11.03.2012; опубл. 10.12.2013, бюл. № 34. 9 с
