Моделирование движения жидкости в прецизионном дозаторе

Автор: Яцун С.Ф., Емельянова О.В., Политов Е.Н.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и промышленность
Статья в выпуске: 5-2 т.11, 2009 года.
Бесплатный доступ
В работе рассматриваются вопросы расчета систем дозирования с учетом динамических эффектов и свойств привода ограниченной мощности, обеспечивающего движение исполнительного элемента прецизионного дозирующего устройства.
Прецизионный дозатор, математическая модель, управляющий импульс, периодическое движение
Короткий адрес: https://sciup.org/148198747
IDR: 148198747 | УДК: 621.43.038.4
Modeling of liquid motion in the precision dosing device
Questions of calculation the dosing systems in view of dynamic effects and properties of restricted power drive pro-viding movement of executive element of the precision dosing device are observed.
Текст научной статьи Моделирование движения жидкости в прецизионном дозаторе
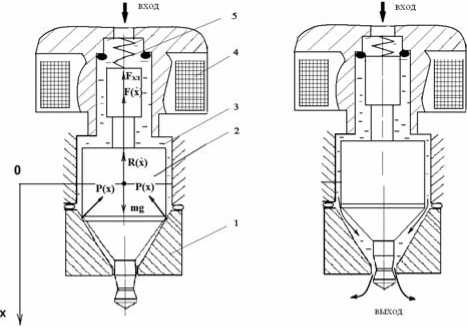
Политов Евгений Николаевич, кандидат технических наук, доцент поступательное движение под действием силы FЭ – управляющего электромагнита, кусочнолинейной силы упругости Рупр, возникающей за счет действия возвратной пружины, жесткостью с, силы сухого трения F(х) и силы вязкого сопротивления R(:x) = ^x , вызванной наличием гидравлического сопротивления жидкой среды. За обобщенную координату х примем перемещение массы m.
а) б)
Рис. 1. Расчетная схема электромагнитного дозатора:
а – закрытое состояние дозатора; б – открытое состояние дозатора; 1 – седло клапана, 2 – запирающий элемент, массой m, 3 – дозируемая жидкость; 4 – обмотки электромагнита; 5 – возвратная пружина
На рис. 2 показана развертка распределенной реакции, действующей на исполнительный элемент со стороны седла клапана. В расчетах эта нагрузка заменена приведенной сосредоточенной силой Р(х) на участке кольцевого зазора, развертку которого на плоскости можно представить отрезком, длинной l и распределенной нагрузкой, интенсивностью р(х), где P(x) = j p ( x ) dL .
L
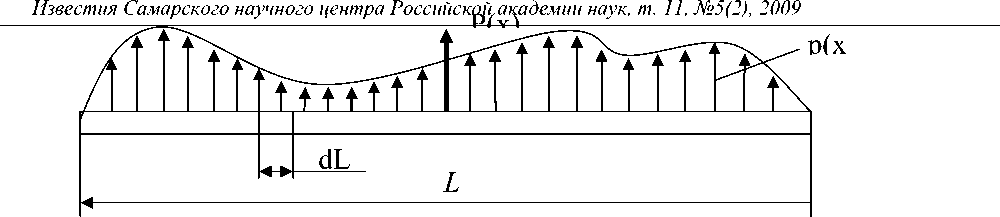
Рис. 2. Развертка распределенной реакции, действующей на исполнительный элемент со стороны седла клапана
Для описания динамических процессов, протекающих в рассматриваемой системе, записаны соответствующие нелинейные дифференциальные уравнения:
mx + px + P(x)+ F(x) = —Fy
Данную модель аналитически можно представить в виде:
Fsign(x),
F(X) = b Fo,
dÔ
— +
dt
^Э-R = U(t) z2μ0s
— Fsign(F o ),
X * 0;
X = O,|F o l < F;
X = O,|F o | > F.
• • • где х,х,х
— соответственно обобщенная ко-
ордината, скорость, ускорение; μ – коэффициент вязкого трения; m – масса клапана; Р(х) – кусочно-линейная сила упругого сопротивления; F( х ) – сила сухого трения; U(t) – напряжение электрического питания; R – активное сопротивление катушки электромагнита, F Э – электромагнитная сила, Ф – магнитный поток; µ 0 – магнитная проницаемость; s= πd2 – площадь поперечного сечения кольцевого зазора, z – число витков проводника с током.
Закон движения иглы клапана зависит от параметров упруго-диссипативных элементов клапана с параметрами упругости с, вязкости ц , а также действующих сил со стороны упругих ограничителей с параметрами с 1 , с 2 . В качестве модели сухого трения принята модель, описанная в [4]. На графике, приведенном на рис. 3, представлена зависимость силы трения от скорости
где F + ,F - предельная сила сухого трения; F 0 – равнодействующая всех сил, кроме силы сухого трения, x & – скорость вдоль оси Ох.
К внутренним силам, действующим в рассматриваемой системе, относятся сила упругости Р упр и сила вязкого сопротивления F всопр [5]. Сила упругости в данной системе кусочно-линейна. На рис. 4 представлена зависимость силы упругости от обобщенной коорднаты:
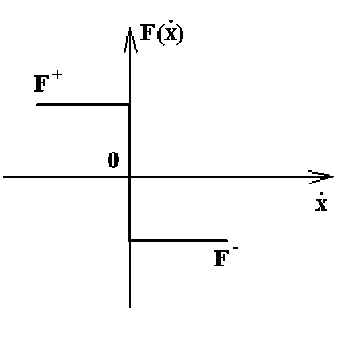
Рис. 3. Модель силы сухого трения
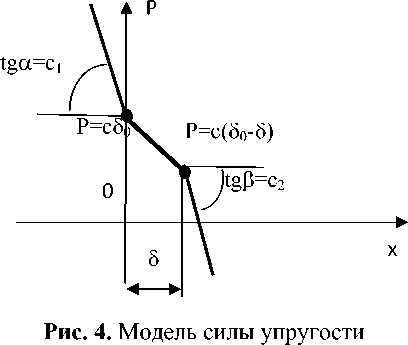
Модель упругого сопротивления
аналитически можно представить в
следующем виде:
Р ( х Н
с ( 5 0 — х )
— C i x + с § о
— с 2 (х — 5)+с(^0 — 5)
при при при
0 < х < 5
х < 0
x > 5
где: 5 - рабочий зазор электромагнита; 50 -величина поджатия пружины; с - коэффициент жесткости пружины; с 1 , с 2 – параметры вязкоупругих ограничителей.
Электромагнитная сила, приближенно может быть определена по формуле 4 [4]:
Ф 2
F ^2
ц 0 п d
.
Система уравнений (1) решается с учетом (2), (3), (4) численным методом с использованием оригинального алгоритма в среде Mathcad 2000, результаты моделирования представлены на рисунках 5, 6.
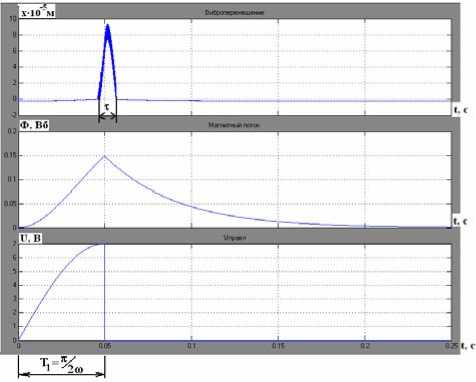
Рис. 5. График перемещения и потока при синусоидальном импульсе, частотой 5 Гц: τ - время отрыва клапана от седла
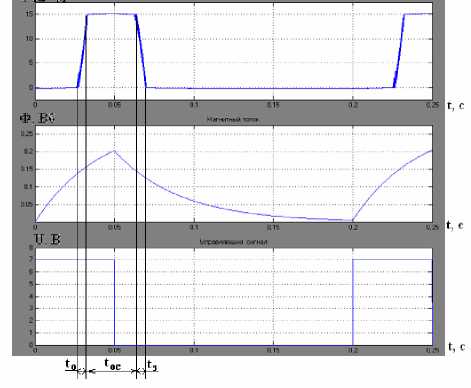
Рис. 6. График перемещения и потока при прямоугольном сигнале, скважность 25%, частота импульсов 5 Гц, t 0 , t з – фаза открытия и закрытия клапана, t ос – фаза открытого состояния клапана дозатора
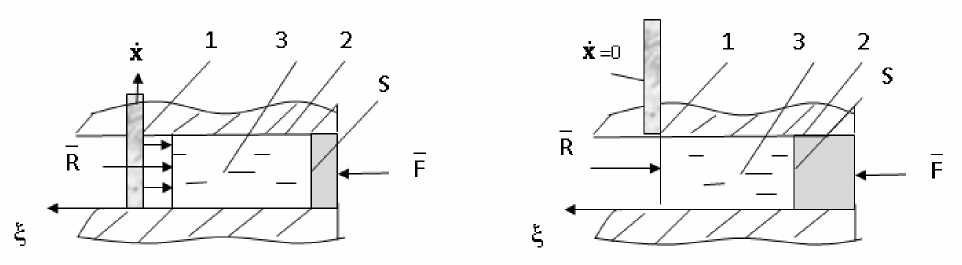
Расчет объема единичной дозы дозатора. В качестве расчетной схемы движения жидкости в дозаторе примем модель, представленную на рис. 7. Будем считать, что жидкость несжимаема, запирающий элемент открывается мгновенно, а жидкость в момент открытия имеет нулевую скорость и начинает двигаться как твердое тело на которое действует сила F и сила вязкого сопротивления R = у^ , вызванная наличием гидравлического сопротивления жидкой среды, где v - эмпирический коэффициент гидравлического сопротивления дозатора.
а) б)
Рис. 7. Приведенная расчетная схема движения жидкости в дозаторе:
1 – запирающий элемент; 2 – упрощенная модель канала системы подачи жидкости; 3 – дозируемая жидкость
Для описания динамических процессов, протекающих в рассматриваемой системе, запишем дифференциальное уравнение движения жидкости, при начальных условиях t=0; ^ =0;
dV
= - 2 nV + f ; dt
• • —— __
m! = -R+F;
v F pS p
где 2n = —; f = — =---= —;
m m S p L p L
Известия Самарского научного центра Российской академии наук, т. 11, №5(2), 2009
S - площадь сечения отверстия; р , V , р -давление, скорость и плотность потока жидкости соответственно.
Обозначим: U = –2nV + f, , тогда для f=const dU dV
---= - 2 n ;
dt dt
Если запирающий элемент открыт в течении времени Т, то объем дозы Q найдем по формуле:
T Q = q ( t ) dt ;
После преобразований получим:
Преобразуем (6) c учетом (7), тогда:
dU dt dU U
-
- 2 nU ;
-
- 2 ndt ;
Q = pS- T + pS- e "2 nT ; (12)
v 2 nv
v
Пусть Я = ; тогда
Интегрируя уравнение (6) с учетом (7), (8), (9) найдем закон изменения скорости:
V = — ( 1 - e 2 nt ) или
2 n
Q = p x
( T XST к
T + P Le p L
X S
к
j
V=
-
2 n p L
- 2 nt e
) v = pS v
к
1 - espL к
; (10)
J
Тогда объемный расход [3] определим как q = VS
q =
pS 2 v
v
1 - espL
к J
Таким образом, объем дозы пропорционален давлению жидкости р и обратно пропорционален коэффициенту гидравлического сопротивления дозатора v , а также нелинейно зависит от времени открытия Т. На рис. 8 показан график зависимости расхода жидкости от времени для различных коэффициентов гидравлического сопротивления дозаторов.
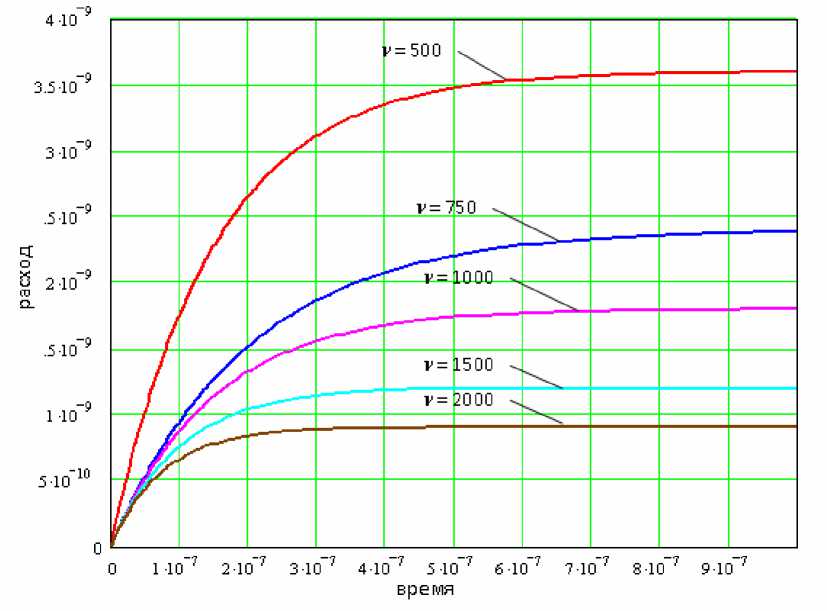
Рис. 8. График зависимостей расхода жидкости от времени для различных дозаторов
Выводы: построена математическая модель и получены дифференциальные уравнения, описывающие движение исполнительного органа прецизионного дозатора, разработана методика их решения в нестационарном режиме и выявлена функциональная связь между параметрами свойств системы и расходом жидкости, видом электрического питания электромагнитов для различных физических свойств жидкости, позволяющая определять параметрами дозатора.
Работа выполнена в рамках госконтракта П2144 от 05.11.09.
Список литературы Моделирование движения жидкости в прецизионном дозаторе
- Башта, Т.М. Гидропривод и гидропневмоавтоматика. -М., Машиностроение, 1972. -320 с.
- Лойцянский, Л.Г. Механика жидкости и газа. -М.: Наука, 1987. -840 с.
- Механика жидкости и газа. Избранное/Под общей ред. А.Н. Крайко. -М.: Физматлит, 2003. -752 с.
- Яцун, С.Ф. Моделирование динамического процесса движения иглы форсунки ДВС/С.Ф. Яцун, О.В. Емельянова//Вибрационные машины и технологии. Сборник научных трудов. Курск, 2005. Ч.1. -С. 172-180.
- Яцун, С.Ф. Исследование управляемых виброударных режимов в электромеханической системе/С.Ф. Яцун, Б.В. Лушников, О.В. Емельянова//Труды VIII Всерос. науч. конф. «Нелинейные колебания механических систем» (Нижний Нов-город, 22-26 сентября 2008 г.). В 2-х томах. Том 2. Под редакцией Д.В. Баландина, В.И. Ерофеева. -Нижний Новгород: Издательский дом «Диалог культур», 2008. -С.263-268.
