Моделирование формирования зоны кристаллографического сдвига в меди с учетом ориентационной зависимости

Автор: Колупаева Светлана Николаевна, Петелин Александр Евгеньевич
Статья в выпуске: 4, 2012 года.
Бесплатный доступ
Представлена математическая модель динамики формирования элементарного кристаллографического скольжения и зоны сдвига в металлах с ГЦК-структурой, позволяющая исследовать формоизменение дислокационной петли, а также энергетические, масштабные и временные характеристики элементарного кристаллографического скольжения и зоны сдвига в целом. Проведен анализ изменения формы дислокационной петли, кинетической энергии единицы длины дислокации и скорости расширения дислокационной петли по различным ориентациям в меди при комнатной температуре.
Математическая модель, элементарное кристаллографическое скольжение, ориентационная зависимость, зона сдвига, гцк-металлы
Короткий адрес: https://sciup.org/146211445
IDR: 146211445 | УДК: 539.37
Modeling of formation of crystallographic shear zone taking into account orientation dependence for copper
The mathematical model of formation of crystallographic shear zone in FCC metals is presented. The mathematical model of formation of crystallographic shear zone in FCC metals is presented. The model allows investigate of energy, scale and temporal characteristics of the elementary crystallographic slip and the shear zone as a whole as well as of the evolution of dislocation loop. The analysis of changes in the shape of a dislocation loop, the kinetic energy per unit length of the dislocation, and the rate of expansion of a dislocation loop for different orientations at room temperature in copper was done.
Текст научной статьи Моделирование формирования зоны кристаллографического сдвига в меди с учетом ориентационной зависимости
Кристаллографическое скольжение является одним из основных механизмов, обусловливающих пластическую деформацию. Процессы кристаллографического скольжения развиваются на различных струк- турных и масштабных уровнях. Определяющим структурным элементом кристаллографического скольжения является зона кристаллографического сдвига. Именно в процессе формирования зоны кристаллографического сдвига генерируются основные дефекты - дислокации и точечные дефекты.
Полноценное исследование формирования зоны кристаллографического сдвига в различных условиях невозможно без использования комбинации экспериментальных, аналитических методов и методов компьютерного моделирования. Среди методов компьютерного исследования механизмов и процессов движения дислокаций в поле дискретных препятствий формирования зоны кристаллографического сдвига доминируют методы имитационного моделирования [1-8]. Они весьма эффективны, но в тоже время чрезвычайно трудоемки. Альтернативными методами являются методы математического моделирования [9-15]. Использование математических моделей не дает такой, как при имитации процессов формирования зоны кристаллографического сдвига, детализации разворачивающихся при прохождении дислокационной петли через лес случайных препятствий картины, но при этом позволяет выявить общий (интегральный) характер закономерностей образования зоны кристаллографического сдвига в различных условиях. Использование такого рода моделей также имеет свои сложности. Так, количество дислокаций в зоне кристаллографического сдвига может достигать десятков, сотен и тысяч, и каждая из дислокаций, как правило, преодолевает десятки тысяч препятствий.
В настоящей работе представлены результаты анализа изменения формы дислокационной петли, кинетической энергии единицы длины дислокации и скорости расширения дислокационной петли по различным ориентациям в меди при комнатной температуре, полученные с использованием математической модели дислокационной динамики кристаллографического скольжения, в которой учтены силы Пича-Кёлера, обусловленные приложенным воздействием, и силы сопротивления движению дислокаций, обусловленные решеточным, примесным и дислокационным трением, вязким торможением, обратными полями напряжений со стороны скопления ранее испущенных дислокаций, а также линейным натяжением дислокаций и генерацией точечных дефектов за порогами на дислокации. В модели учтена зависимость силы линейного натяжения дислокации и интенсивности генерации точеч- ных дефектов за порогами на дислокации от ориентации вектора Бюргерса по отношению к линии дислокации (далее ориентационная зависимость) [16, 17].
1. Математическая модель
Математическая модель динамики i -й дислокационной петли, производимой дислокационным источником, представлена в виде системы обыкновенных дифференциальных уравнений [16, 17]
<
^k- - \ +тb - Tnb т dt V R
Цо + b k
r
( К _)0,75HI 77 -Р IPjPs^GbРr т
V 12 )
Gb 2 i (2 -v )
' 4 к (1 - v )( D /2 - r )
- Bc
J17 =
Vb|
Ч Л — +1
7 "2
■ 0
)
)
• С.
N1 Ъ V Vb|
Ч Л — +1
7 "2
1 о )
, (1)
dr , — - + c dt
717 =
Vb
Ч 1 — +1
7 " 2
.
10 )
Здесь Р - угол между вектором Бюргерса и линией дислокации; ь k и r -текущие кинетическая энергия единицы длины дислокации и радиус дислокационной петли в ориентации, определяемой углом Р ; т - действующее напряжение; т R = т f + т d ( т f - напряжение решеточного и примесного трения, т d - дислокационное сопротивление движению дислокации); i - номер дислокации в скоплении; G - модуль сдвига; b - модуль вектора Бюргерса; v - коэффициент Пуассона; р - плотность дислокаций; B - коэффициент вязкого торможения; с - поперечная скорость звука в металле; p j - доля порогообразующих дислокаций некомпланарных систем скольжения; p s - доля порогообразующих дислокаций на околовинтовых сегментах дислокационной петли; ^ - множитель Смоллмена; D - максимальная ширина зоны сдвига [8], определяемая как D - Br т / ( Gb p ) [18, 19], где Br - вычисляемый параметр; H ( x ) - функция Хевисайда, ц 0 - линейное натяжение покоящейся дислокации, которое с учетом ориентационной зависимости определяется по формуле [20]
Ц о = ( Gb 2/(4 к (1 -v )) )( (1 + v )cos 2 ( p ) + (1 - 2 v )sin 2 ( p ) ) ln ( p- 1/2 / b ) .
Верхний знак в правой части первого уравнения системы ОДУ (1) соответствует расширению дислокационной петли, нижний - сжатию (обратному движению от дислокационного скопления к дислокационному источнику, которое происходит, когда дислокационная петля останавливается на расстоянии от скопления меньшем, чем расстояние, при котором равнодействующая всех сил, действующих на дислокацию, равна нулю).
В модели (1) предполагается, что точечные дефекты генерируются в пределах пятнадцати градусов от винтовой ориентации дислокационной петли [21]. Дислокационная петля представлена в полярной системе координат, в начальной конфигурации имеет форму окружности, центр которой совпадает с центром системы координат, винтовые компоненты дислокационной петли нормальны полярной оси, а краевые - параллельны ей. В этих предположениях дислокационная петля является осесимметричной, в силу чего для сокращения времени расчетов математическая модель записана только для первой четверти. Характеристики дислокационной петли для других четвертей могут быть получены путем симметричного преобразования.
Все параметры математической модели (1) имеют физический смысл и, как правило, являются характеристиками материала или воздействия на него.
Математическая модель дислокационной динамики кристаллографического скольжения (1) может быть использована для исследования формоизменения дислокационной петли, а также энергетических, масштабных и временных характеристик элементарного кристаллографического скольжения и зоны сдвига в целом с учетом зависимости силы линейного натяжения дислокации и интенсивности генерации точечных дефектов за порогами на дислокации от ориентации вектора Бюргерса по отношению к линии дислокации.
2. Результаты исследования и их обсуждение
Исследование изменения формы дислокационной петли в процессе движения, а также кинетической энергии единицы длины дислокации и скорости расширения дислокационной петли по различным ориентациям проведено с использованием комплекса программ Dislocation Dynamics of Crystallographic Slip [15]. Для расчетов выбраны значения параметров материала, характерные для меди при комнатной температуре: G = 5,566-10-5 Н/м2; B = 2,1 -10“5 Па-с; а = 0,5; тf = 1 МПа; р = 1012 м-2.
При моделировании расширения дислокационной петли расчеты проводились через один градус с учетом зависимости силы линейного натяжения и интенсивности генерации точечных дефектов за порогами на дислокации, самодействие дислокаций не учитывалось. При моделировании формирования первой дислокационной петли по каждой из выбранных ориентаций расчеты останавливаются по достижении дислокацией диаметра D либо при ее остановке до достижения диаметра D за счет сопротивления движению дислокации от учитываемых механизмов ее торможения. По ориентации, по которой время достижения D оказалось минимальным (обозначим минимальное время достижения D как tD ), ширина зоны сдвига принимается равной D . По всем остальным ориентациям, по которым остановка дислокации произошла по достижении диаметра D , ширина зоны сдвига определяется по пробегу дислокации за время tD . Все остальные дислокационные петли останавливаются за счет учитываемых в модели сил сопротивления.
В расчетах, проведенных при значениях параметров материала, характерных для меди при различной температуре, показано, что для первой дислокационной петли максимальный пробег всегда наблюдается по краевой ориентации; по винтовой и околовинтовым ориентациям, где действует дополнительное сопротивление движению дислокационной петли, обусловленное генерацией точечных дефектов, пробег дислокации никогда не достигает D . Аналогичные результаты получены также для свинца и алюминия.
Моделирование движения дислокационной петли, исходно представленной в виде окружности (рис. 1, кривые 1 ), показало, что форма петли в начале движения изменяется на близкую к эллиптической, где малая полуось коллинеарна вектору Бюргерса (рис. 1, кривые 2 ).
При дальнейшем движении дислокации возникает «участок вогнутости», которая увеличивается с пробегом дислокации (рис. 1, кривые 3 - 8 ). В конечной конфигурации радиус дислокационной петли в ориентациях, близких к винтовой, более чем на порядок меньше радиуса в краевой и близких к ней ориентациях (рис. 1, кривые 8 ).
Отметим, что наблюдаемый на дислокационной петле «участок вогнутости» при учете в расчетах силы самодействия дислокационной петли будет менее выражен, чем показано на рис. 1.
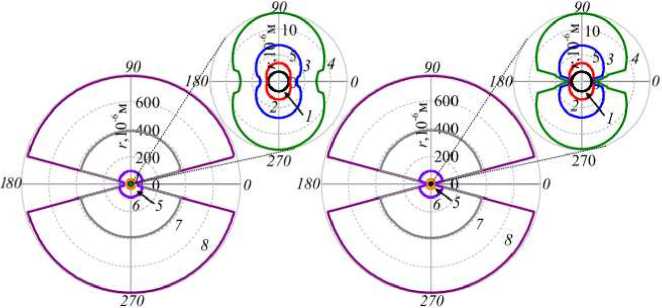
б
а
Рис. 1. Форма первой ( а ) и последней ( б) испущенной дислокационным источником дислокационной петли в различные моменты времени от начала движения, с: 1 - 0 (момент старта); 2 - 1,28 - 10-8; 3 - 3,84 - 10 8 ; 4 - 8,25 - 10 8 ; 5 - 2,47 - 10-7; 6 - 6,67 - 10-7;
7- 2,7-Ю-6; 8 - 5,75 - 10-5
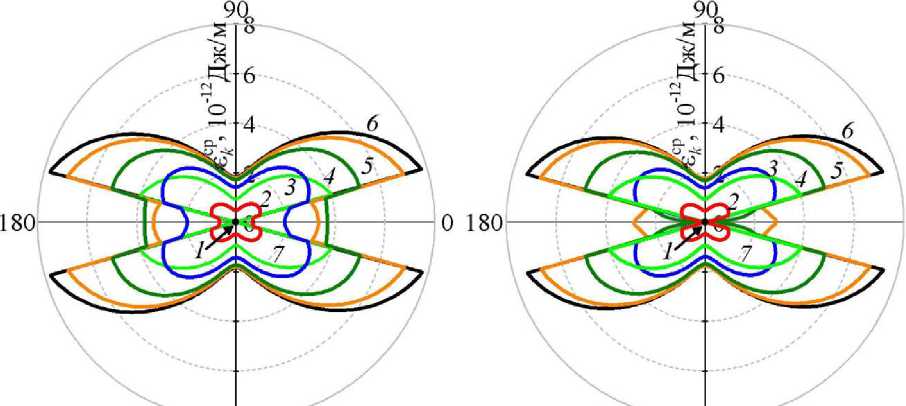
По винтовой и близким к ней ориентациям дислокационная петля быстро (примерно на 2 % пробега) набирает максимальное значение кинетической энергии и быстро (на ~ 2 - 5 % пробега) её теряет (рис. 2, кривые 1-5 ), по другим ориентациям возрастание кинетической энергии осуществляется примерно за то же время, что и по винтовой ориентации, но достигает большего значения примерно на половине пробега (рис. 3, кривые 6 ), и либо практически до конца пробега не изменяется (для первой дислокационной петли), либо убывает достаточно медленно (для последней дислокации в скоплении).
Кинетическая энергия единицы длины дислокации на всем пробеге дислокационной петли принимает наибольшие значения в направлении 15 - 30 градусов от ориентации вектора Бюргерса по отношению к линии дислокации, при этом на начальном пробеге максимальное значение кинетической энергии достигается при Р = 30 (рис. 2, кривые 24 ), а на десятой части пробега до остановки дислокации - при р = 15 (рис. 2, кривые 5-7 ) .
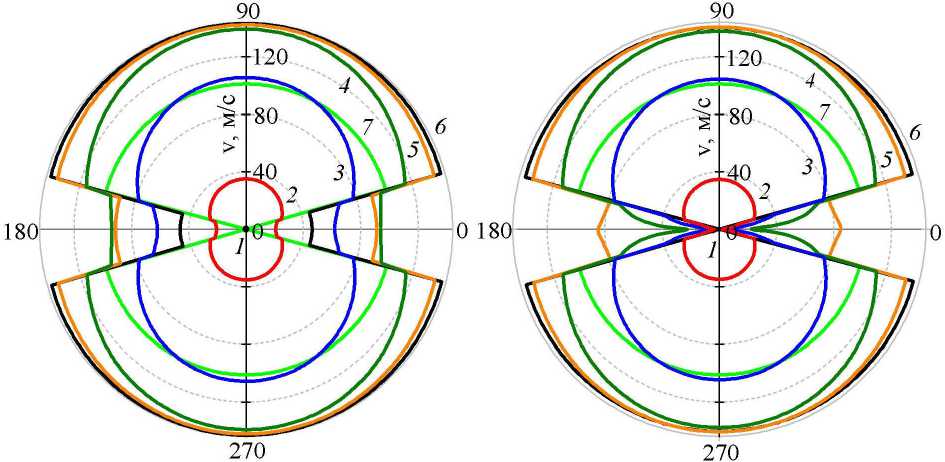
Скорость дислокационной петли на всем её пробеге в направлении винтовой и близких к ней ориентаций ниже, чем по другим ориентациям (рис. 3). Разница в скорости по различным направлениям наиболее заметна для дислокаций с большим порядковым номером в скоплении. Например, для последней испущенной дислокационным источником дислокационной петли скорость в направлении краевой ориентации больше скорости в направлении винтовой ориентации примерно на порядок величины (рис. 3, б).
270 270
а б
Рис. 2. Кинетическая энергия единицы длины первой ( а ) и последней ( б ) испущенной дислокационным источником дислокационной петли в различные моменты времени от начала движения, с: 1 - 0; 2 - 1,28 - 10-8; 3 - 3,84 - 10-8; 4 - 8,25 - 10-8; 5 - 2,47 - 10-7; 6 - 3,08 - 10-6; 7 - 5,51 - 10-6
а
б
Рис. 3. Скорость первой ( а ) и последней ( б) испущенной дислокационным источником дислокационной петли в различные моменты времени от начала движения, с: 1 - 0;
2 - 1,28 - 10-8; 3 - 3,84 - 10-8; 4 - 8,25 - 10-8; 5 - 2,47 - 10-7; 6 - 6,67 - 10-7; 7 - 5,51 - 10-6
Максимальное значение скорости единицы длины дислокации в направлении винтовой и близких к ней ориентаций достигается примерно на десятой части пробега, после чего уменьшается. По другим направлениям скорость растет на протяжении примерно 15% пробега и до половины пробега практически не изменяется. После прохождения примерно половины пробега до остановки скорость дислокационной петли уменьшается по всем ориентациям (рис. 3, кривые 7).
Проведен сравнительный анализ данных, полученных с использованием математических моделей дислокационной динамики кристаллографического скольжения без учета [14, 15] и с учетом [16, 17] ориентационной зависимости с экспериментальными данными [22]. Показано, что средняя скорость дислокационной петли, полученная с учетом ориентационной зависимости, лучше согласуется с полученной экспериментально средней скоростью дислокации, чем при использовании модели без учета ориентационной зависимости. Сравнение по количеству дислокаций в зоне кристаллографического сдвига с теоретическими оценками [23] и экспериментальными данными [24] также свидетельствуют о преимуществе модели с учетом ориентационной зависимости.
В результате проведенных вычислительных экспериментов с использованием математической модели с учетом зависимости силы линейного натяжения дислокации и интенсивности генерации точечных дефектов за порогами на дислокациях от ориентации вектора Бюргерса по отношению к линии дислокации [16, 17] и значений параметров материала, характерных для меди при комнатной температуре, показано, что дислокационная петля в процессе расширения приобретает сложную форму, близкую к эллиптической, с выраженным «участком вогнутости» по винтовой и близким к ней ориентациям. При учете ориентационной зависимости результаты вычислительных экспериментов лучше согласуются как с экспериментальными, так и теоретическими данными, чем при использовании модели без учета ориентационной зависимости, но при этом выше трудоемкость вычислений. Поэтому при проведении комплексных исследований дислокационной динамики кристаллографического скольжения математическую модель без учета ориентационной зависимости [14, 15] целесообразно использовать для выявления общих закономерностей формования зоны кристаллографического сдвига, а модель с учетом ориентационной зависимости [16, 17] - для получения более детальной информации.
