Моделирование гидравлической системы устройства с самоадаптацией по силовым и кинематическим параметрам на рабочем органе

Автор: Хиникадзе Т.А., Рыбак А.Т., Попиков Петр Иванович
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 1 т.21, 2021 года.
Бесплатный доступ
Введение. В настоящее время в России принят курс на создание интеллектуальных машин и оборудования. Это относится и к мобильным технологическим машинам дорожно-строительного и коммунального назначения. Поэтому проектирование и создание такого вида исполнительных устройств с функцией самоадаптации является актуальной задачей.Материалы и методы. Представлено устройство, оснащённое гидроприводом с самоадаптацией по нагрузке и согласованием кинематических и силовых параметров главного движения и движения подачи рабочего органа установки для бурения породы. Для исследования и проектирования устройства на основе методов математического моделирования гидропривода и адаптивных систем предложена математическая модель, разработанная с использованием основ теории объёмной жёсткости гидравлических систем. Это позволяет максимально точно описать влияние динамических свойств гидравлической системы (сжимаемость рабочей жидкости, упругие свойства трубопроводов, рукавов высокого давления, гидравлических аппаратов) на динамические свойства системы в целом.Результаты исследования. Математическая модель для устройства с самоадаптацией включает подмодели адаптивных связей, взаимосвязи силовых, кинематических и технологических параметров бурения породы, а также математическое описание движения элементов системы. Решение полученной математической модели производилось в среде программного обеспечения динамического моделирования технических систем SimInTech. В результате получены общие зависимости адаптивной системы от конструктивных параметров и технологических условий функционирования.Обсуждение и заключение. Математическая модель представленного устройства показывает принципиальную возможность реализации принципа самоадаптации по нагрузке при внешних и внутренних возмущающих воздействиях в процессе работы. Полученные результаты могут использоваться при проектировании адаптивных систем другого технологического оборудования, например, для глубокого сверления заготовок с переменными свойствами по глубине.
Гидравлическое устройство с самоадаптацией, функция гидропривода, обобщенная математическая модель, адаптивные связи, согласованные движения, рабочий орган, нагрузка, стабилизация
Короткий адрес: https://sciup.org/142229410
IDR: 142229410 | УДК: 62-82 | DOI: 10.23947/2687-1653-2021-21-1-55-61
Simulation of the hydraulic system of a device with self-adaptation for power and kinematic parameters on the working body
Introduction. Currently, Russia has adopted a course towards the creation of intelligent machines and equipment. The same holds for mobile technological machines for road construction and public utilities. Therefore, the design and creation of this type of actuators with a self-adaptation function is a critical task.Materials and Methods. A device equipped with a hydraulic drive with self-adaptation to load and coordination of kinematic and power parameters of the principal motion and the feed movement of the working body of the rock- drilling rig, is presented. To study and design the device based on the mathematical modeling methods of a hydraulic drive and adaptive systems, a mathematical model is proposed. It is developed using the foundations of the theory of volumetric stiffness of hydraulic systems. This enables to accurately describe the impact of the dynamic properties of the hydraulic system (compressibility of the working fluid, elastic properties of pipelines, high-pressure hoses, hydraulic apparatuses) on the dynamic properties of the system as a whole.Results. The mathematical model for a device with self-adaptation includes submodels of adaptive communication, interrelations of power, kinematic and process parameters of rock drilling, as well as mathematical description of the movement of system elements. The solution to the developed mathematical model was performed in the software environment for dynamic modeling of technical systems SimInTech. As a result, general dependences of the adaptive system on the design parameters of the system and the operating conditions are obtained.Discussion and Conclusion. The mathematical model of the presented device shows the fundamental possibility of implementing the principle of self-adaptation in terms of load under external and internal disturbing actions during operation. The results obtained can be used under designing adaptive systems of other technological equipment, for example, for the implementation of deep drilling in workpieces with variable properties in its depth.
Текст научной статьи Моделирование гидравлической системы устройства с самоадаптацией по силовым и кинематическим параметрам на рабочем органе
УДК 62-82
Введение. Принятый в России курс на создание интеллектуальных машин является основой для проектирования и создания исполнительных устройств с функцией самоадаптации. Решение этой задачи является своевременным и актуальным.
Свойством самоадаптации обладают приводы с дифференциальными связями элементов внутренней структуры [1]. К такому классу технических систем относится устройство для осуществления бурения породы с переменными свойствами (патент РФ № 2582691). Свойство самоадаптации реализуется устройством с обратной отрицательной и прямой положительной связями [2].
На качество процесса самоадаптации оказывают влияние внешние и внутренние воздействия — непостоянство нагрузки, сопротивление среды, сухое и вязкое трение, объемная жесткость жидкости и трубопроводов, адаптивные связи.
Материалы и методы. При современном уровне развития вычислительной техники, сложности и высокой стоимости проектируемого оборудования широкое распространение получили методы математического моделирования на стадии разработки [3–13]. Разработка специальной модели для расчетов и вычислительного эксперимента по определению параметров на этапе проектирования дает возможность обоснованного выбора типоразмера устройства с самоадаптацией.
Авторами разработана математическая модель для решения задачи проектирования устройства в среде динамического моделирования технических систем SimInTech (Simulation In Technic) [14, 15]. Этот программный продукт позволяет проводить моделирование технологических процессов, протекающих в различных отраслях с одновременным моделированием систем управления.
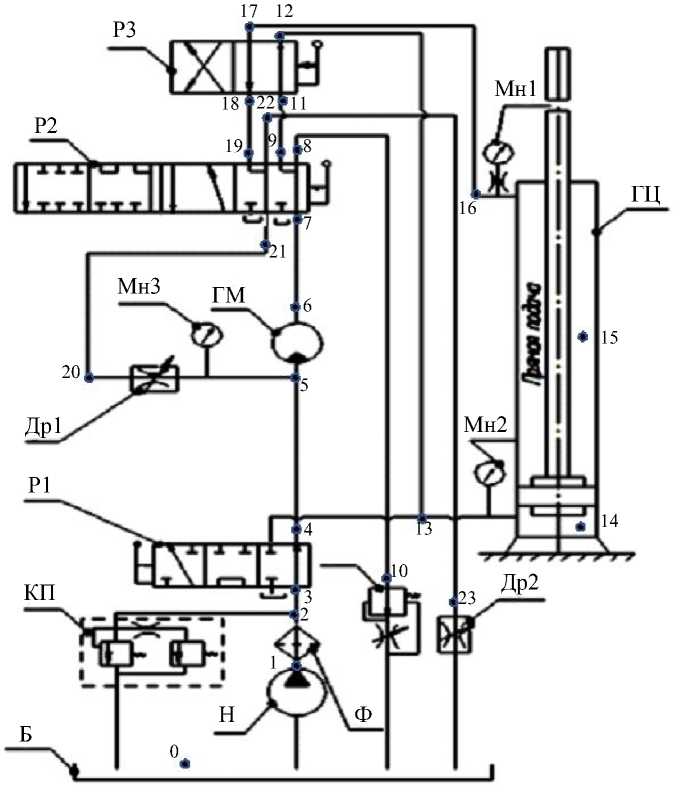
На рис. 1 представлено устройство для осуществления функции самоадаптации в условиях силового сопротивления на рабочем органе, которое содержит: насос постоянной производительности (Н), предохранительный клапан (КП), фильтр (Ф), регулируемые дроссели (Др1) и (Др2), регулятор расхода (РР), гидроцилиндр подачи (ГЦ) и гидромотор главного движения (ГМ), гидрораспределители (Р1), (Р2) и (Р3), манометры (Мн1), (Мн2) и (Мн3), гидравлический бак (Б) и трубопроводы.
Р3
Мн1
Р2
ГЦ
Мн3
ГМ
Мн2
Др1
Р1
Др2
КП
Н
Ф
Б
17 12
Рис. 1. Принципиальная схема устройства для осуществления функции самоадаптации в условиях силового сопротивления на рабочем органе
Устройство предназначено для реализации функции самоадаптации по нагрузке (с целью её стабилизации) и согласования выходных движений рабочего органа технологических машин и оборудования, а также функций собственно силового привода. Поэтому в устройстве предусмотрены многопозиционные распределители для формирования потоков и направлений рабочей жидкости. К таким дополнительным функциям устройства относятся: разогрев масла в гидросистеме в начале её работы; «взвешивание» подвижных частей (холостой нагрузки) механизма подачи при наладке на технологический режим; ускоренный подъём (отвод) инструмента с вращением, но без регулирования его скоростей; подачу инструмента «на объект воздействия» или «от объекта воздействия» с вращением и регулированием скоростей инструмента.
Математическая зависимость для внутренней отрицательной связи устройства устанавливается путем совместного решения уравнений, вытекающих из уравнений баланса давления по системе и уравнения баланса расхода рабочей жидкости в системе обратной связи.
Из баланса давлений в системе вытекает
ДРдр5 = ^™ + 7- - (1 f~) ^РдрЮ, (1) ^гм Уп Уп где Дрдр5 и Дрдр10 — перепады давлений на дросселях 5 и 10; wrM и Мгм — приведенный объём гидромотора ГМ и создаваемый им крутящий момент; /п и /пшт — площади поршня гидроцилиндра в поршневой и штоковой полостях; Fn — сила сопротивления со стороны грунта, преодолеваемая при перемещении штока гидроцилиндра ГЦ.
Машиностроение и машиноведение
Уравнение баланса расходов в цепи обратной связи имеет вид
О др10
Q gpS + ^ п • Г п.шт ,
где Q gpS и 2 др10 — расходы рабочей жидкости через дроссели Др1 и Др2; у п — скорость перемещения поршня гидроцилиндра ГЦ.
Имея в виду, что гидронасос Н, питающий систему, имеет постоянную производительность, расход рабочей жидкости через регулятор расхода РР в процессе функционирования системы привода остаётся постоянным. Становится очевидным, что расход рабочей жидкости через дроссель Др2 также будет постоянным. В этом случае зависимость ускорения движения поршня гидроцилиндра ГЦ от суммарной нагрузки на гидродвигателях главного движения и движения подачи примет вид
ЙГ п dt
_д / 1 йМ ум 1 dF А
V^гм dt f n dtn/ '
где гп — скорость перемещения поршня гидроцилиндра ГЦ; t — время; А — коэффициент обратной связи, зависящий от параметров номинального режима работы системы, конструктивных параметров гидромашин, дросселей и его настройки.
Из уравнения (3) видно, что положительным приращениям крутящего момента на валу гидромотора и перемещению поршня подачи гидроцилиндра соответствует отрицательное приращение скорости перемещения подачи инструмента. Другими словами, при увеличении сопротивления со стороны грунта вращению режущего инструмента или перемещению его подачи, скорость подачи инструмента уменьшается.
Прямая связь между скоростями и ускорениями вала гидромотора главного движения и штока гидроцилиндра движения подачи имеет вид уп г (^гм^™ Qpp),
Гп или dvn d«rM
"57 = ^гм — где шгм — угловая скорость вращения вала гидромотора; Qpp — расход рабочей жидкости через регулятор расхода.
Из уравнения (4) видно, что при увеличении частоты вращения гидромотора главного движения (происходит при уменьшении сопротивления со стороны обрабатываемой поверхности) скорость перемещения поршня гидроцилиндра подачи возрастает.
Математическое моделирование движений рабочих элементов устройства. Уравнения движения ротора гидромотора основного движения и поршня гидроцилиндра подачи инструмента имеют вид:
1 гм^ = ДР гм ^ гм
—
сопp ,
dvn
ТО п— = Г п Р п
—
У п.шт р п.шт
—
сопp ,
где |гм — суммарный момент инерции всех вращающихся элементов системы, приведённый к валу
гидромотора; т п — масса всех подвижных частей системы, приведённая к поршню гидроцилиндра; M сопp — суммарный момент сопротивления вращению рабочего органа, приведённый к валу гидромотора; 77 сопp — суммарная сила сопротивления перемещению инструмента со стороны обрабатываемой поверхности, приведённая к поршню гидроцилиндра; Др гм — перепад давления на гидромоторе; рп и рп . шт — давления в поршневой и в штоковой полостях гидроцилиндра соответственно.
Моделирование свойств гидравлической системы
Математическая модель гидравлической системы устройства для осуществления функции самоадаптации в условиях силового сопротивления на рабочем органе разработана с использованием объемной жесткости, которая даёт возможность осуществлять моделирование максимально приближенно к реальным характеристикам [16–20]. При моделировании особое внимание уделено определению приведенного коэффициента объёмной жёсткости рукавов высокого давления [16]. Полученная математическая модель включает следующие уравнения:
— уравнение приращения давления в различных точках (на рис. 1 обозначены точками с 1 по 23) гидравлической системы имеет вид:
dр = C пp i (ZQ вxi -ZQ ис Xi )dt, (7)
где £ Q BXi и £ Q HCXi — суммы всех расходов рабочей жидкости, входящих и исходящих из рассматриваемого ( i- го) объёма системы за время dt ; C пp ^ — приведенный коэффициент объёмной жесткости выделенного участка гидравлической системы;
— уравнение для определения расходов рабочей жидкости через различные элементы гидравлической системы имеет вид:
Q i — ^jf^
—
P i+i l • sign(P i
—
P i+i ).
где p i и p i+1 — давление на входе и на выходе гидравлических сопротивлений; f — площадь живых сечений сопротивлений; ρ — плотность рабочей жидкости;
— формула расчёта приведенного коэффициента расхода линейных сопротивлений следующая:
H = Hl = — где dl и ll —диаметры и длины линейного участка трубопровода; λl — коэффициент гидравлического трения трубопровода;
— формула для определения приведенного участков трубопровода имеет вид:
коэффициента объёмной жёсткости металлических
C — Ц-
L nd2l
E fl
6 Ег
где d и l — внутренний диаметр и длина участка трубопровода; δ — толщина его стенки; Efl и El — модули упругости жидкости и материала стенки гидролинии.
Приведенные коэффициенты объёмной жёсткости РВД определяются экспериментально.
Производительность гидронасоса определяется с учётом объёмных потерь по формуле:
Q™= ^о, . (11)
где q pн — рабочий объем гидронасоса; ω н — скорость вращения вала гидронасоса; η 0,н — текущая величина объемного коэффициента полезного действия гидронасоса.
Расход рабочей жидкости через гидромотор определяется по формуле: _ 9 рм ш м мот — )
2лЛо,м где qpм — рабочий объем гидронасоса; ωм — скорость вращения вала гидронасоса; η0м — текущая величина объемного КПД гидромотора.
Текущая величина объемных коэффициентов полезного действия гидронасоса и гидромотора определяются по формуле:
П 0 = 1 — (1 — ^ O.nom ) • рТгРий , (13)
Результаты исследования
Предлагаемая математическая модель рассматриваемого устройства позволяет с высокой точностью произвести теоретические исследования эксплуатационных возможностей при бурении породы ещё на стадии проектирования. Расчёт системы бурения, произведённый с использованием программного обеспечения SimInTech [10, 11], показал правильность этого утверждения.
Машиностроение и машиноведение
а )
б)
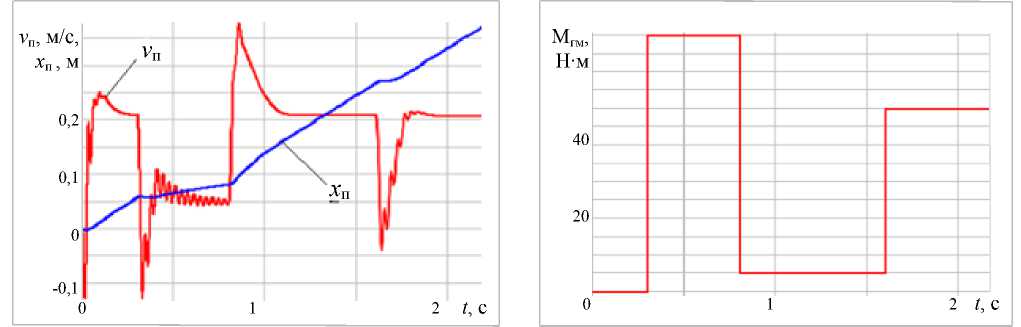
Рис. 2. Изменение параметров функционирования буровой машины при ступенчатом изменении сопротивления вращению основного рабочего органа буровой машины со стороны грунта: а — перемещение поршня гидроцилиндра ( x п) и его скорости ( v п); б — момент сопротивления вращению вала гидромотора М гм
На рис. 2 представлены графики изменения параметров движения поршня гидроцилиндра подачи при ступенчатом изменении момента сопротивления вращению основного рабочего органа буровой машины со стороны грунта.
Анализ результатов расчётов, представленных на рис. 2, показывает, что с увеличением момента сопротивления вращению рабочего органа буровой машины (рис. 2 б ) скорость поступательного перемещения инструмента уменьшается и может принимать отрицательные значения (рис. 2 а ), что говорит о выполнении системой функции адаптации. Свойства системы требуют дополнительного исследования.
Заключение. Предлагаемая математическая модель позволяет ещё на стадии проектирования делать предварительную оценку качества работы и выбирать наиболее рациональные параметры системы бурения, оснащённой адаптивным гидромеханическим приводом, при различных условиях эксплуатации и варьировании её конструктивных свойств. Полученные результаты и их анализ говорит о том, что предложенный способ адаптации основного и вспомогательного движений системы привода может с успехом применяться и в другом технологическом оборудовании, например, при глубоком сверлении многослойных металлических заготовок.
Список литературы Моделирование гидравлической системы устройства с самоадаптацией по силовым и кинематическим параметрам на рабочем органе
- Иванов, К. С. Теория механизмов с двумя степенями свободы / К. С. Иванов, Е. К. Ярославцева. — Lambert Academic Publishing, 2014. — 180 с.
- Хиникадзе, Т. А. Исследование соответствия характеристик адаптивного модуля гидропривода технологическим параметрам машин / Т. А. Хиникадзе // Молодой исследователь Дона. — 2018. — № 2 (11) — С. 107-112.
- Попиков, П. И. Математическая модель рабочего процесса лесного пожарного грунтомета с энергосберегающим гидроприводом / П. И. Попиков, П. Э. Гончаров, А. В. Шаров // Лесотехнический журнал. — 2017. — № 4. — С. 182-189.
- Особенности численного интегрирования системы дифференциальных уравнений рабочего процесса почвообрабатывающей машины с гидроприводом для профилактики и тушения лесных пожаров / И. М. Бартенев, П. И. Попиков, А. В. Шаров, Н. А. Шерстюков // Лесотехнический журнал. — 2018. — № 3 (31). — С. 170-176.
- Моделирование срабатывания предохранительных устройств лесного пожарного грунтомета / П. И. Попиков, П. Н. Щеблыкин, А. В. Шаров, А. С. Буравлев // Актуальные направления научных исследований XXI века: теория и практика. — 2017. — Т. 5, № 1 (27). — С. 336-340.
- Теоретические основы моделирования динамических характеристик приводов перспективных космических аппаратов с учетом функционирования осцилляторов / А. Н. Сова, М. И. Степанов, В. А. Сова, А. И. Быков // Вестник Донского государственного технического университета : [сайт] — 2019. — Т. 19, № 4. — С. 317-327. — URL : https://www.elibrary.ru/item.asp?id=41591369 (дата обращения : 27.01.2021).
- Исследование динамики делителя потока с регулирующим органом из эластомера / В. В. Сыркин, И. Н. Квасов, Ю. Ф. Галуза, М. А. Федорова // Омский научный вестник. Серия «Авиационно-ракетное и энергетическое машиностроение». — 2018. —Т. 22, № 4. — С. 9-14.
- Алексеев, Г. В. Возможности моделирования оборудования для снижения энергоемкости реализуемых технологических процессов / Г. В. Алексеев, О. И. Аксенова // Вестник Международной академии холода. — 2015. — № 4. — С. 49-54.
- Berdnik, Y. The approximation method in the problem on a flow of viscous fluid around a thin plant / Y. Berdnik, A. Beskopylny // Aircraft Engineering and Aerospace Technology. — 2019. — Vol. 91, no. 6. — P. 807-813.
- Beskopylny, A. Model of heterogeneous reinforced fiber form concrete in bending / A. Beskopylny, E. Kadomtseva, G. Strelnikov [et al.] // IOP Conference Series: Materials Science and Engineering. — 2018. — Vol. 365(3). — P. 032023.
- Beskopylny, A.N. The boundary condition influence on a stress-strain state of a corrugated plate on an ^ elastic foundation. / A. N. Beskopylny, E. E. Kadomtseva, G. P. Strelnikov // Materials Science Forum. — 2018. — £ Vol. 931. — P. 60-65.
- Beskopylnyi, A.N. About the identification of layered constructions properties / A.N. Beskopylnyi, A. A. Lyapin // Recent Trends in Science and Technology Management. — 2016. — No. 2. — P. 36-45.
- Чукарин, А. Н. Исследования виброакустических характеристик в рабочей зоне оператора при абразивной обработке сварных швов / А. Н. Чукарин, А. Н. Бескопыльный, А. Г. Исаев // Безопасность труда в промышленности. — 2019. — № 11. — С. 7-12.
- Kartashov, B. A. Dynamic mode environment of technical systems SimInTech : manual / B.A. Kartashov, O.S. Kozlov, E.A. Shabaev // Moscow: DMK-Press, 2017. — 424 p.
- Abalov, A. A. Using the SiminTech dynamic modeling environment to build and check the operation of automation systems / A.A. Abalov, S.V. Nosachev, V.P. Zharov [et al.] // MATEC Web of Conferences. — 2018. — Vol. 226. — P. 04003.
- Rybak, A.T. Modeling and calculation of hydromechanical systems dynamics based on the volume rigidity theory / A.T. Rybak, M.P. Shishkarev, A.A. Demyanov [et al.] // MATEC Web of Conferences. — 2018. — Vol. 226. — P. 01001.
- Rybak, A.T. Dynamics of Synchronous Hydromechanical Drive in Mobile Machine / A.T. Rybak, A.R. Temirkanov, O.V. Lyakhnitskaya // Russian Engineering Research. — 2018. — Vol. 38(9). — P. 702-704. DOI: 10.3103/S1068798X18090253
- Темирканов, А. Р. Синхронный гидромеханический привод рабочего органа мобильной машины и его математическая модель / А. Р. Темирканов, А. Т. Рыбак // Вестник Донского государственного технического университета : [сайт]. — 2013. — Т. 13, № 3-4. — С. 104-110. — URL : https://www.vestnik-donstu.ru/jour/article/view/400 (дата обращения : 27.01.2021).
- Темирканов, А. Р. Моделирование системы гидромеханического привода рабочего органа мобильной технологической машины. / А. Р. Темирканов, А. Т. Рыбак // Вестник Донского государственного технического университета : [сайт]. — 2014. — Т. 14, № 4. — С. 176-185. — URL : https://www.vestnik-donstu.ru/jour/article/view/362 (дата обращения : 27.01.2021).
- Мирный, В. И. Некоторые вопросы повышения производительности гидравлического привода перфорационного пресса циклического действия / В. И. Мирный // Вестник Донского государственного технического университета : [сайт] — 2008. — Т. 8, № 1. — С. 75-85. — URL : https://www.vestnik-donstu.ru/jour/article/view/1212 (дата обращения : 27.01.2021).
