Моделирование и анализ системы регулирования притока воды в резервуар

Автор: Королев Р.С.
Журнал: Форум молодых ученых @forum-nauka
Статья в выпуске: 5-2 (21), 2018 года.
Бесплатный доступ
При управлении сложными технологическими процессами и при их анализе особую актуальность приобретает моделирование с использованием программных средств. В статье описывается процесс математического моделирования объекта - участка трубопровода подачи речной воды. Основные составляющие объекта рассматриваются с точки зрения типовых динамических звеньев систем автоматического управления. Приводится алгоритм цифрового пропорционально-интегрально-дифференциального закона регулирования. Представлены результаты применения данного алгоритма при регулировании величины среднесуточной подачи воды математической модели и реального объекта.
Автоматизация, динамическое звено, передаточная функция, математическое моделирование, регулирование, управляемый объект
Короткий адрес: https://sciup.org/140282672
IDR: 140282672
Modeling and analysis of the system of regulation of the influence of water into the tank
Modeling with the use of software is of particular relevance in the management of complex technological processes and in their analysis. The article describes the process of mathematical modeling of an object - section of the pipeline of river water supply. The main components of the object are considered from the point of view of typical dynamic links of automatic control systems. The algorithm of digital proportional-integral-differential regulation law is given. The results of application of this algorithm are presented when adjusting the value of the average daily water supply of a mathematical model and a real object.
Текст научной статьи Моделирование и анализ системы регулирования притока воды в резервуар
Теория автоматического управления (ТАУ) [1] - научная дисциплина, предметом изучения которой являются информационные процессы, протекающие в системах управления техническими и технологическими объектами.
Как правило, при настройке контура управления на реальном объекте могут возникать сложности, связанные со сложностью технологического процесса, объекта или применяемого алгоритма регулирования.
Для решения задач управления в промышленности используются программируемые логические контроллеры (ПЛК). Как отмечают в своей работе Парасар Кодати, Том Эрккинен, и Аркадий Туревский, «в случае простых задач управления, например, в системах c пропорционально-интегрально-дифференциальным регулированием (ПИД) инженеры могут ввести ПИД-регулятор и настроить усиление при работающей машине. В более сложных системах управления программирование и проверка логики управления на ПЛК требуют значительныхусилий. Конструкторы должны определить значения всех параметров схемы управления и убедиться, что все составляющие алгоритма управления будут взаимодействовать так, как запланировано. Настройка сложной схемы управления на аппаратном прототипе или на реальном технологическом процессе не только отнимает много времени, но и характеризуется высокой степенью риска повреждения оборудования. Альтернативным решением является использование моделирования, что позволяет создавать и проверять сложные стратегии управления на моделях.
Затем такую же модель можно использовать для автоматического создания структурированного текста, соответствующего международному стандарту МЭК 61131 и предназначенного для программирования ПЛК при развертывании» [2].
В данное статье рассмотрен один из основных методов исследования в ТАУ - математическое моделирование – замена реальных физических процессов и систем их математическими моделями.
Моделирование ведется путем создания модели объекта в Matlab Simulink - графической среде имитационного моделирования, позволяющей при помощи блок-диаграмм в виде направленных графов, строить динамические модели, включая дискретные, непрерывные и гибридные, нелинейные и разрывные системы [3].
Математическое описание объекта
Объектом моделирования и анализа является участок трубопровода подачи речной воды со станции I-го подъема на водопроводные очистные сооружения (ВОС) в резервуар чистой воды (РЧВ). Регулируемая величина (уставка) - среднесуточная подача (расход) воды в РЧВ.
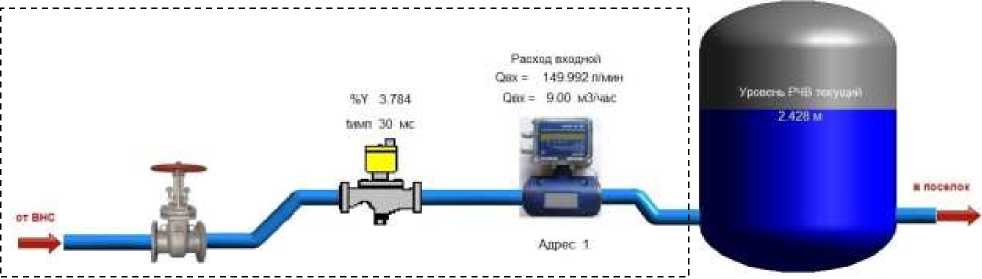
Рис. 1- Мнемосхема объекта (прямоугольное выделение - моделируемая часть)
На рис. 1 представлена мнемосхема объекта, представляющая собой схему с информацией, представленной в виде совокупности графических элементов.
Исследуемый объект состоит из механической задвижки с ручным приводом, задвижки с многооборотным электроприводом, электромагнитного расходомера.
Управляемым объектом является механическая задвижка с электроприводом с постоянной скоростью перемещения. Обратная связь по положению отсутствует.
Рассмотрим данный объект с точки зрения типовых динамических звеньев САУ и приведем их основные характеристики [1].
Электропривод задвижки является интегрирующим звеном - выходная величина угла поворота вала пропорциональна интегралу по времени от входной величины управляющего воздействия сетевого переменного напряжения U = 220В с частотой f = 50 Гц.
Дифференциальное уравнение звена:
t y = Kj x(t)dt.
Передаточная функция звена:
W(s) = K .
s
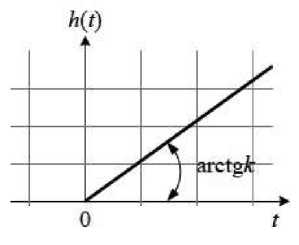
Рис.2 – Временная характеристика интегрирующего звена
На рисунке 2 дан график временной характеристики интегрирующего звена, представляющий собой прямую линию с углом наклона α=arctg k
При подаче на вход интегрирующего звена воздействия выходной сигнал постоянно возрастает.
Окно задания параметров интегратора представлено на рисунке 3.
Время полного открытия задвижки составляет 65 секунд, поэтому при моделировании используется интегратор с насыщением.
V Limit output
Upper saturation limit:
Рис.3 – Верхний предел насыщения интегратора
Механическая часть задвижки представляет собой апериодическое (инерционное) звено первого порядка.
Дифференциальное уравнение звена:
Tdy + y = Kx dt , где Т – постоянная времени; k – коэффициент передачи звена.
Передаточная функция звена:
W(s) =
K
Ts + 1 .
Переходная функция:
t
y(t) = K x o (1 - e T ) .
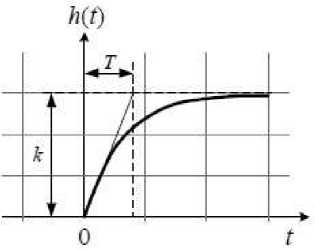
Рис.4 – Временная характеристика инерционного звена
На рисунке 4 дан график временной характеристики инерционного звена.
Установившееся значение выходной величины равно k . Время, за которое процесс достигает 0.63 от установившегося значения – Т -постоянная времени инерционного звена.
Реальные значения расходной характеристики задвижки, т.е. зависимости изменения расхода от изменения хода штока степени открытия от времени задвижки были получены экспериментальным путем. Для аппроксимации полученной зависимости наилучшим образом подходит экспоненциальная функция вида: t
y(t) = 1 - e T , где T = 2.6 с.
График пропускной способности задвижки представлен на рисунке 5.
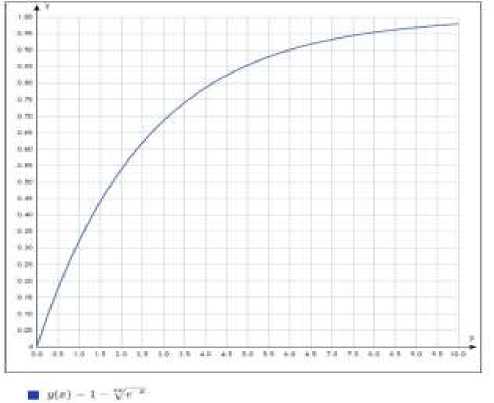
Рис.5 – Пропускная способность задвижки
По оси абсцисс отложено значение в секундах суммарного времени воздействия сетевого напряжения на электропривод, а по оси ординат – относительная пропускная способность (значение «0» - полностью закрытое положение, «1» - полностью открытое положение).
В результате идентификации объекта в реальных условиях было определено, что в связи с конструктивными особенностями электропривода, а также ввиду существования люфтов составных деталей и элементов механической части задвижки, при подаче управляющего воздействия в момент времени от 0 до 1 секунды открытия не происходит. Поэтому в модель объекта введено звено MATLAB Function реализующее функцию – f1 - сохранение нулевого значения интегратора в вышеуказанный момент времени.
В рамках данной задачи электромагнитный расходомер представлен пропорциональным (усилительным) звеном.
Дифференциальное уравнение звена:
y = Kx .
Передаточная функция звена:
W(s) = K .
На рисунке 6 дан график временной характеристики пропорционального звена. Выходной сигнал для этого звена повторяет по форме входной сигнал, но усиливается в k раз.
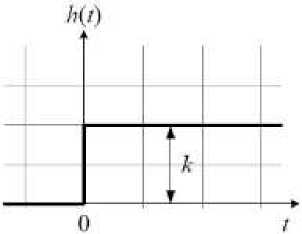
Рис.6 – Временная характеристика пропорционального звена
Т.к. максимальный расход при полностью открытой задвижке составляет 21.5 м3/час, то K =21.5.
В связи особенностями движения жидкости по трубопроводу, а также с временной задержкой расходомера между измерением величины расхода и выдачей соответствующего сигнала на регулятор в обратную связь исследуемой модели вводится звено транспортной задержки или звено чистого запаздывания.
Дифференциальное уравнение звена:
y(t) = x(t - τ ) .
Передаточная функция звена:
W(s) = e- τ s.
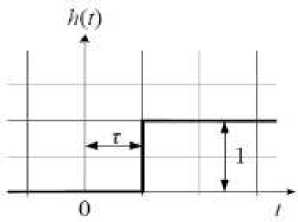
Рис.7 – Временная характеристика звена чистого запаздывания
На рисунке 7 дан график временной характеристики звена чистого запаздывания. Выходной сигнал сдвинут по отношению к входному на величину времени запаздывания τ.
Время запаздывания расходомера т = 90 секунд.
Типовая переходная характеристика объекта управления с транспортной задержкой представлена на рисунке 8 [4]
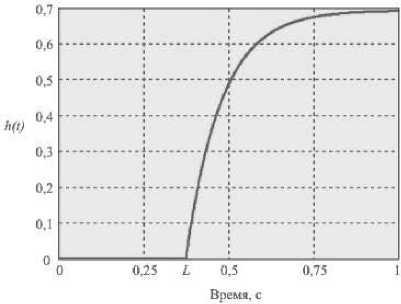
Рис.8 - Переходная характеристика объекта с транспортной задержкой
Кривая начинается с задержки L, затем происходит плавное нарастание.
Цифровой ПИД-регулятор
Для регулировки и стабилизации значения среднесуточной подачи воды применяется дискретный ПИД-регулятор с зоной нечувствительности на выходе, что способствует исключению частых кратковременных срабатываний задвижки, которые могут привести к возникновению автоколебаний системы.
Уравнение цифрового дискретного ПИД-регулятора [5]:
^i = -у— I Д( + — Ei AZmM + Ev/C; 1
л Р \ 7 и . ^ИЗМ /
Исключив коэффициент полосы пропорциональности и добавив пропорциональный коэффициент Kp , получим:

где i- индекс суммирования отсчетов от начала процесса до текущего i- го временного такта.
Данное уравнение получено путем замены операторов дифференцирования и интегрирования в уравнений классического ПИД-регулятора конечными разностями и конечными суммами [6].
При использовании ПИД-регулятора с выходным устройством типа электромагнитное реле необходимо устанавливать период управляющих импульсов Т сл .
Период управляющих импульсов должен совпадать или превышать величину времени транспортной задержки расходомера. Чем выше период управляющих импульсов (т. е. меньше период Т сл ), тем медленнее реакция регулятора на внешние возмущения.
Таким образом, увеличение значения Тсл ведет к ухудшению качества регулирования.
Окончательный вид выходного сигнала дискретного выходного устройства преобразуется в последовательность импульсов согласно формуле:
Yi D = Тсл -----,
Тхода где Тхода – время открытия задвижки до обеспечения максимального расхода воды, с.
На рисунке 9 представлен вид сигнала на дискретном выходе типа реле, имеющим два состояния: «Вкл» – включен, «Откл»- отключен [5].
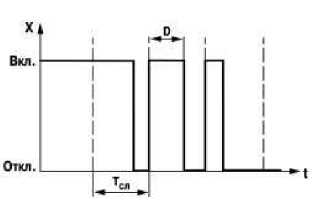
Рис.9 – Временная диаграмма выходного сигнала ПИД-регулятора
Математическое моделирование
Математическая модель объекта, реализованная в Simulink, представлена на рисунке 10.
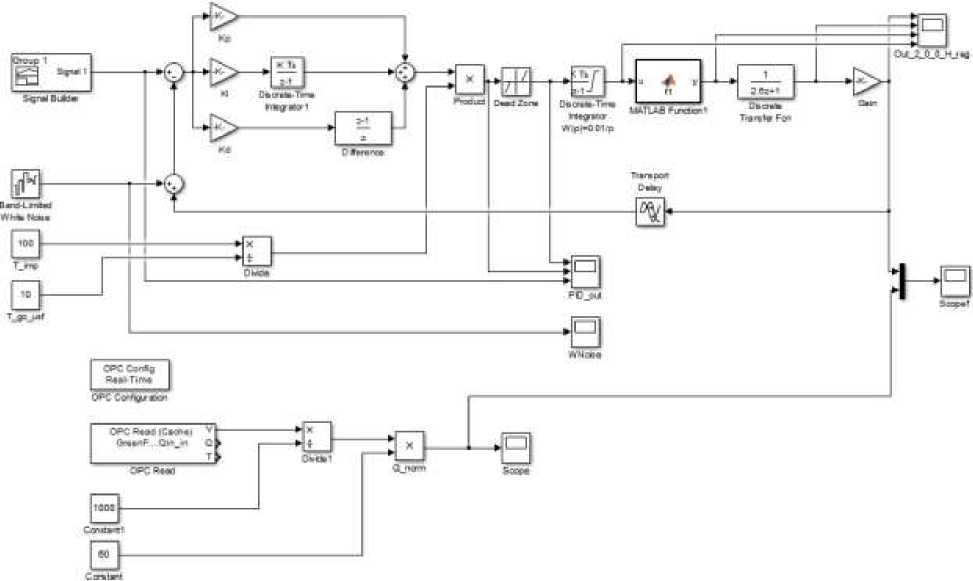
Рис.10 – Математическая модель объекта в Simulink
Модель представляет собой совокупность блоков, входящих в стандартные Simulink-библиотеки, и связей между ними.
В процессе моделирования были получены переходные процессы при изменении в течение суток регулируемой величины (уставки) дневного и ночного расходов.
Значение уставки подачи воды в дневной период продолжительностью 14 часов - с 8.00 часов до 22.00 часов – 9 м3/час; ночной – 10 часов – с 22.00 часов до 8.00 часов – 5 м3/час.
|
10 8 6 |
|||||||||||||||
|
г |
|||||||||||||||
|
I |
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 a) ,10® |
.с |
|||||||||||||
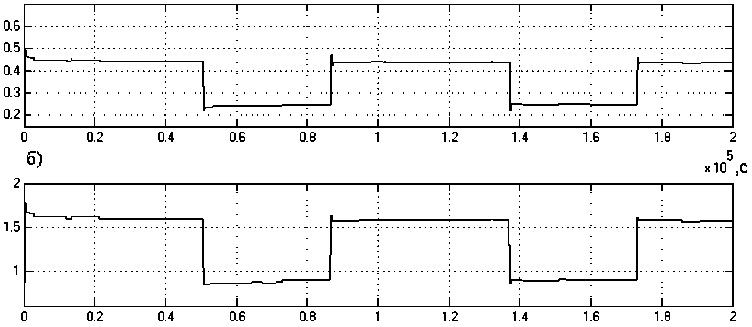
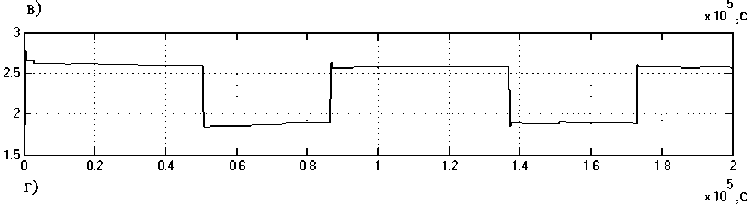
Рисунок 11 – Цифровое ПИД-регулирование: а) установившееся значение предполагаемого расхода; б) значение пропускной способности задвижки; в) значение «полезного» управляющего воздействия на электропривод; г) значение «полного» управляющего воздействия на электропривод
На рисунке 11 представлены результаты моделирования.
Изначально система находилась в покое (подача воды в РЧВ отсутствует, задвижка в закрытом состоянии), а затем производилось включение системы. Результаты переходного процесса получены с условием существующей погрешности измерений электромагнитного расходомера и наличием шумов в измерительном тракте с максимальной амплитудой 0.05 м3/час.
Полученные результаты моделирования и данный алгоритм цифрового ПИД-регулирования реализованы на реальном объекте ВОС. Принцип реализации в рамках данной статьи рассматриваться не будет.
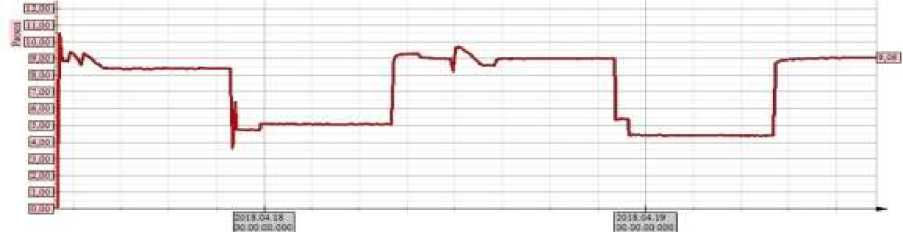
Рисунок 12 – Установившееся значение расхода на объекте управления (ВОС)
Установившиеся значения расхода представлены на рисунке 12.
При смене уставки наблюдается незначительное перерегулирование, что ведет к увеличению времени установления.
Для сравнения полученных результатов моделирования с практическими значениями расхода обеспечивается связь исследуемой модели со значениями реального процесса. Для обеспечения работы Simulink с OPC- сервером SCADA-системы, осуществляющим сбор данных реального объекта управления, в модель добавлены объекты OPC Configuration и OPC Read, находящихся в разделе OPC Toolbox [7] (рис.10).
Заключение
Таким образом, результаты моделирования подтверждают возможность использования данной модели для регулирования значения среднечасового расхода подачи воды. Используемый алгоритм регулирования может быть применен при управлении реальным объектом (ВОС) в виде прикладного программного обеспечения устройства-регулятора. Различия между моделируемыми и практическими результатами обусловлены погрешностями измерительных приборов, особенностями и наличием стохастических составляющих в процессе движения воды в трубопроводе, индивидуальными конструктивными особенностями реальных управляемых объектов и органов управления.
Список литературы Моделирование и анализ системы регулирования притока воды в резервуар
- Дядик В.Ф., Байдали С.А., Криницын Н.С. Теория автоматического управления: учебное пособие // Томск: Изд-во Томского политехнического университета, 2011. 196 с.
- Парасар К., Эрккинен Т., Туревский А. Разработка и реализация на базе ПЛК комплексных стратегий управления // Электронные компоненты. 2012. №3
- Simulink. URL: https://matlab.ru/products/Simulink/ (дата обращения 06.05.2018).
- Эквивалентные преобразования структур ПИД-регуляторов. URL: http://www.bookasutp.ru/Chapter5_3_4.aspx#EquivalentTransformations/ (дата обращения: 20.04.2018).
- ТРМ10 Измеритель ПИД-регулятор микропроцессорный одноканальный // Руководство по эксплуатации. 111 с.
- Уравнение цифрового ПИД-регулятора. URL: http://www.bookasutp.ru/Chapter5_4_6.aspx/ (дата обращения: 16.02.2018).
- Дрозд О.В., Капулин Д.В. Моделирование и исследование автоматизированных систем управления и диспетчеризации технологических процессов // Исследования наукограда. 2013. № 3-4(6). С. 42
