Моделирование и анимация пространственного движения маневрирующего спутника землеобзора

Автор: Татьяна Евгеньевна Сомова
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 6-1 т.14, 2012 года.
Бесплатный доступ
Кратко представляются методы и разработанные программные средства для моделирования, имитации и анимации пространственного управляемого движения космического аппарата (КА) землеобзора с отображением маршрутов съемки на поверхности Земли.
Космический аппарат землеобзора, анимация пространственного движения
Короткий адрес: https://sciup.org/148201629
IDR: 148201629 | УДК: 629.78
Modeling and animation of maneuvering land-survey sattelite spatial motion
We shortly present methods and elaborated software for modeling, imitation and animation of spatial controlled motion by a land-survey spacecraft with a mapping the observation courses on the Earth surface.
Текст научной статьи Моделирование и анимация пространственного движения маневрирующего спутника землеобзора
При проектировании многоцелевых космических систем наблюдения, в том числе с применением сканирующей съемки поверхности Земли (рис. 1), весьма полезно применять современные компьютерные средства 3D-анимации. Решение общей задачи моделирования, имитации и анимации движения КА представляется следующими этапами: расчет параметров поступательного орбитального и углового движения КА для заданной последовательности различных маршрутов съемки; визуализация поверхности Земли с учетом освещённости; расчет трассы полета, зон покрытия и следа линии визирования; отображение конструкции КА с учетом засветки ее элементов Солнцем; организация визуального отображения пространственного движения КА.
Рис.1. Схема сканирующей съемки
Татьяна Евгеньевна Сомова, младший научный сотрудник отдела «Наведение, навигация и управления движением» НИИ Проблем надежности механических систем.
Для решения указанной задачи использована разработанная в отделе «Наведения, навигации и управления движением» НИИ ПНМС СамГТУ программная система SIRIUS-S [1] и специализированная программная среда для визуализации расчетных результатов в трёхмерной графике, созданная в среде программирования Delphi 7 с применением графической библиотеки OpenGL.
ПРОГРАММНАЯ СИСТЕМА SIRIUS-S
Программная среда SIRIUS-S (рис. 2) предназначена для формирования облика систем ги-росилового наведения КА ДЗЗ [3] в отношении периодичности, производительности и оперативности наблюдения, разрешения на местности, точности наведения и стабилизации бортового телескопа с учетом возмущений, ограничений и др. факторов. Используемые SIRIUS-S модели Земли; внешней обстановки; конструкции КА, включая оптический тракт телескопа и гироси-ловые исполнительные органы; поступательного и углового движения КА, маршрутных движений при объектовой, стерео- и площадной съемке, а также пространственных поворотных
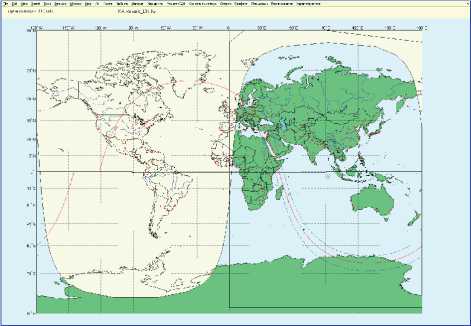
Рис. 2. Диалоговая среда системы SIRIUS-S маневров, позволяют выполнить расчет всех кинематических параметров поступательного и углового движения КА и сформировать набор xm– файлов для обмена с подсистемой визуализации.
Для расчета координат произвольного объекта в поле зрения съемочной камеры вводятся системы координат (СК) и следующие обозначения: OxI yI zI – инерциальная система координат (ИСК); Oxg yg zg – гринвичская система координат (ГСК); Ooxoyozo – орбитальная система координат (ОСК); Ofxf yfzf – система координат камеры (СКК), связанная с ее фокальной плоскостью, при этом F – фокусное расстояние камеры; Rt – радиус-вектор текущей точки трассы в ИСК; Ro – радиус-вектор текущей точки орбиты в ИСК; Rm – радиус-вектор текущей точки следа центральной линии визирования (ЦЛВ) на маршруте съемки в ИСК; R – радиус-вектор произвольной точки (x, y, z)I изображения в ИСК; r – радиус-вектор произвольной точки (x, y, z) f изображения в СКК, рис. 3. Отметим, что в поле зрения съемочной камеры одновременно находятся как поверхность вращающейся Земли с отмеченными на ней маршрутами выполняемой оптико-электронной сканирующей съемки, так и конструкция КА, совершающая пространственное поступательное и угловое движение, причем панели солнечных батарей (СБ) могут поворачиваться относительно корпуса КА.
Модель КА представлена системой твердых тел, включающих его корпус, телескоп с подвижной крышкой объектива, четыре звездных датчика в составе бесплатформенной инерциальной навигационной системы (БИНС), комплексную двигательную установку (КДУ) на базе восьми электрореактивных двигателей (ЭРД), рис. 4, и
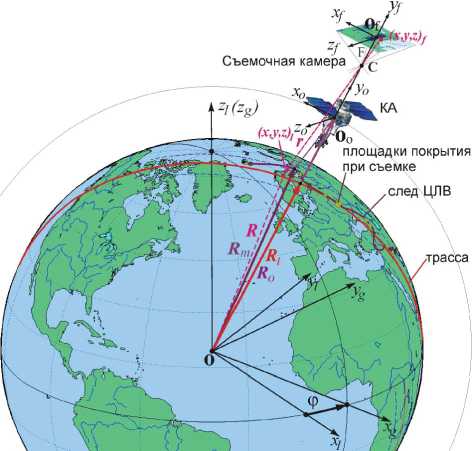
Рис. 3. Системы координат и схема расчета координат в поле зрения съемочной камеры Моделирование конструкции КА
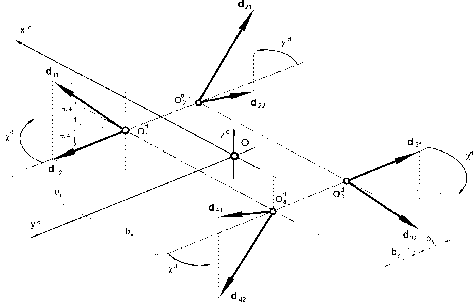
Рис. 4. Схема КДУ на основе 8 ЭРД четыре подвижные панели СБ, каждая в двухстепенном кардановом подвесе по схеме «вилка». 3D-модель конструкции КА составлена в среде Blender [3,4], отображение ее элементов с учетом освещённости Солнцем выполнено средствами OpenGL.
На рис. 5 показан пример визуализации конструкции спутника землеобзора с открытой крышкой телескопа в двух различных ракурсах.
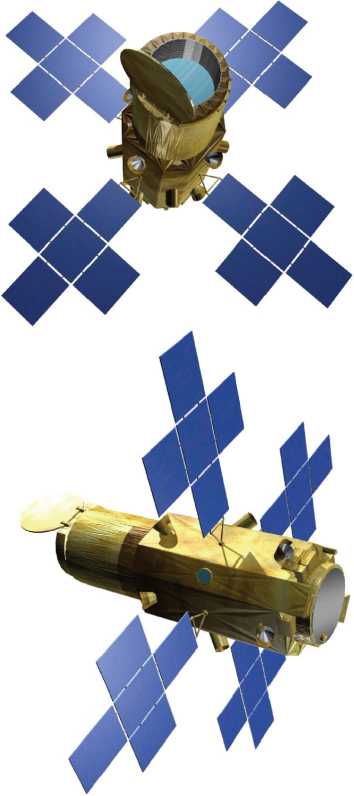
Рис. 5. Два положения конструкции КА
АНИМАЦИЯ ДВИЖЕНИЯ КА
Для отображения пространственного движения в реальном (либо ускоренном) времени применяется специализированная программная среда, созданная в среде программирования Delphi 7 с применением графической библиотеки OpenGL [5]. Минимальные требования к компьютеру включают тактовую частоту 1GHz, память 128MB RAM, видеокарту 128MB 3D Card. Работа программы начинается со стандартной процедуры “наклейки” текстуры в виде плоской карты Земли на сферическую поверхность. Далее на эту карту наносятся объекты наблюдения, выполняется перевод их географических координат в СК текстуры. Затем определяется орбитальное положение центра масс КА и угловое положение телескопа в СК сцены съемочной камеры. Отображаются элементы конструкции КА, точка трассы, точка прохождения линии визирования через поверхность Земли, и, если в этот момент времени выполняется сканирующая съемка, то и положение проекции линейки ПЗС на поверхность Земли.
Программа визуализации позволяет изменять масштаб изображения и положение точки наблюдения сцены космической сканирующей съемки поверхности вращающейся Земли. В режиме анимации (рис. 6) с помощью манипулятора «мышь» можно выполнять следующие действия:
. вращать изображение Земли вокруг ее собственной оси, проходящей через полюса при зажатии левой кнопки мыши и перемещения её влево / вправо;
. вращать изображение Земли вокруг оси, проходящей через экватор и направленной в начальный момент времени на наблюдателя, при зажатии левой кнопки мыши и перемещения её вверх / вниз;
. приближать и удалять камеру относительно Земли с помощью колесика мыши.
Представим результаты выполнения задания на съемку (рис. 7, таб. 1) при следующих данных: орбита солнечно-синхронная круговая c накло-

Рис. 6. Боковые кадры анимации движения спутника при сканирующей съемке

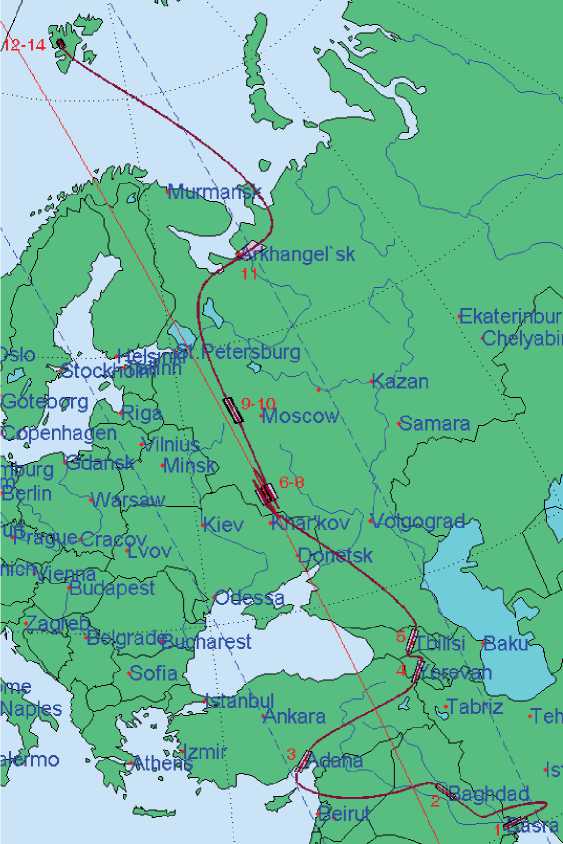
Рис. 7. Пример задания на съемку
Таблица 1. Результаты выполнения задания на съемку
|
i |
Метод съёмки |
t i, c |
τ i , c |
|
1 |
Geo |
475 |
10 |
|
2 |
Geo |
575 |
14 |
|
3 |
Geo |
620 |
11 |
|
4 |
Geo |
660 |
15 |
|
5 |
Geo |
690 |
14 |
|
6 |
Trace |
735 |
14.45 |
|
7 |
Trace |
845 |
14.45 |
|
8 |
Trace |
955 |
14.45 |
|
9 |
Stereo |
990 |
23.44 |
|
10 |
Stereo |
1053 |
23.5 |
|
11 |
Smooth |
1120 |
10 |
|
12 |
Trace |
1200 |
8 |
|
13 |
Trace |
1225 |
8 |
|
14 |
Trace |
1250 |
8 |
нением 98о, аргументом перигея 120о и высотой полёта КА 600 км, формальная дата съемки 30.06.2009, декретное московское время (ДМВ) прохождения восходящего узла орбиты 08:58:08.
В таб. 1 указаны номер маршрута съёмки ( i ), метод съемки (съёмка по геодезической линии –
Geo, трассовая съёмка – Trace, стереосъёмка – Stereo, съёмка с выравниванием скорости движения изображения (СДИ) в фокальной плоскости телескопа – Smooth), момент времени начала маршрута съёмки ( t i ), отсчитываемый от момента времени прохождения восходящего узла орбиты, и длительность ( τ i ) соответствующего маршрута съёмки. При этом маршрутами i = 1 ^ 5 реализуется объектовая съёмка, маршруты i = 6 ^ 8 обеспечивают площадную съёмку, маршрутами i = 9,10 выполняется стереосъёмка, криволинейный маршрут i = 11 обеспечивает наиболее точный режим съёмки с выравниванием СДИ и маршруты i = 12 ^ 14 реализуют трехкратную объектовую съемку.
Некоторые результирующие кадры анимации пространственного движения КА при выполнении указанного задания представлены на рис. 8.
ЗАКЛЮЧЕНИЕ
Кратко описаны методы и разработанные программные средства для моделирования, имитации и анимации пространственного управляемого движения спутника землеобзора с отображением маршрутов съемки на поверхности Земли. Представлены полученные результаты трёхмерного моделирования конструкции спутника и анимации его пространственного движения относительно вращающейся Земли для тестового задания на космическую сканирующую съёмку.
Работа поддержана РФФИ (грант 11-0801037) и отделением ЭММПУ РАН (программа фундаментальных исследований № 14).
Список литературы Моделирование и анимация пространственного движения маневрирующего спутника землеобзора
- Раевский В.А., Титов Г.П., Сомов Е.И., Бутырин С.А. Автоматизация динамических исследований и проектирования систем управления движением космических аппаратов: от СПО СИРИУС к MATLAB//Аэрокосмическое приборостроение. 2003. № 4. С. 38-43.
- Сомов Е.И., Бутырин С.А., Бутко А.В. Программная среда для формирования функционального облика систем гиросилового наведения космических телескопов//Известия Самарского научного центра РАН. 2008. Т. 9. № 3. С. 808-814.
- Mullen T. Introducing Character Animation with Blender. B&W Publishing, 2nd ed. Edinburgh. 2011.
- Blender Basics. Учебное пособие. 3-е изд. на рус. языке. 2012. http://b3d.mezon.ru/index.php/Blender_Basics_3-rd_edition
- Энджел Э. Интерактивная компьютерная графика. Вводный курс на базе OpenGL. М.: Вильямс, 2001.
