Моделирование электропривода активного прицепа

Автор: Усынин Юрий Семенович, Григорьев Максим Анатольевич, Шишков Александр Николаевич, Горожанкин Алексей Николаевич, Бычков Антон Евгеньевич, Белоусов Евгений Викторович, Журавлев Артем Михайлович, Сычев Дмитрий Александрович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 2 т.13, 2013 года.
Бесплатный доступ
Выполнено математическое моделирование электропривода активного прицепа. Модель описывает механическое и электромеханическое преобразование энергии. В качестве системы управления электроприводом выбрана классическая схема подчиненного регулирования. Электропривод выполнен как многоконтурная система регулирования, которая содержит контур регулирования фазных токов статора, момента двигателя и скорости. Модель учитывает нелинейность кривой намагничивания стали, из которой выполнен двигатель. Рассмотрены режимы разгона электропривода, пробуксовки и юза колес.
Активный прицеп, электропривод с синхронной реактивной машиной независимого возбуждения, математическая модель
Короткий адрес: https://sciup.org/147158231
IDR: 147158231 | УДК: 62-83::621.313.3
Electric drive of the active trailer
This article deals with active trailer electric drive mathematical modelling. The model describes mechanical and electromechanical energy conversion. As the electric drive control system there is chosen classic subordinate control scheme. The electric drive is designed as a multiple-loop control system that includes the control loop of stator phase current, motor torque and speed. The model takes into account the nonlinearity of the magnetization curve of steel, that the motor is made of, and also modes of wheel slipping.
Текст научной статьи Моделирование электропривода активного прицепа
В [1] показано, что в активных автомобильных прицепах, работающих в тяжелых дорожных условиях, целесообразно применение регулируемого электропривода с большой (до 10:1 и более) кратностью поддерживаемого момента в режиме ограничения мощности. Такие перегрузки обеспечивает электропривод с синхронной реактивной машиной независимого возбуждения [7, 18–24].
Нерешенными остаются вопросы синтеза структуры и настройки системы управления электроприводом. В настоящей статье рассмотрены выбор и обоснование структуры (характера обратных связей) системы регулирования электропривода, синтез регуляторов и формулировка рекомендаций по их настройке в условиях широкого диапазона изменения параметров электропривода, определение достижимых показателей качества процессов при типовых для тягового электропривода воздействиях (разгоне всего автопоезда, резком изменении усилия сопротивления движению, скачкообразном изменении сил сцепления при пробуксовке или при стопорении). Расчеты выполнялись на базе программного комплекса Matlab с помощью упрощенной модели системы электропривода.
Модель электропривода
На модели тягового электропривода активного прицепа регулируемые переменные были представлены в относительных единицах в соответствии с правилами, изложенными в [2, 3]. В качестве исходных базовых величин переменных были приняты: Vo = 10 м/с - линейная скорость транспортного средства и соответствующая ей угловая скорость колеса в режиме холостого хода электропривода прицепа; Р н = 40 кВт - мощность тягового электропривода прицепа, принятая за базовую:
М5 = — = 40^ — = 4000 Нм - базовый мо й ^0 io мент электропривода.
Структурная схема модели электропривода приведена на рис. 1. Электропривод выполнен как многоконтурная система регулирования, которая содержит контуры регулирования фазных токов статора, момента двигателя и скорости.
На вход внешнего контура регулирования скорости КРС подают сигнал задания скорости п3, который соответствует (а в относительных единицах равен) линейной скорости Ро движения автомобиля: пз = Vo.
Внешний сигнал Дпск, соответствующий неизбежно существующей величине скольжения между окружной поверхностью колеса и грунтом, задавали в пределах 2…4 % от базового значения при движении автомобиля по шоссе и до 15 и даже 20 % при движении по бездорожью [4].
Схемой обеспечивается тяговая механическая характеристика электропривода (рис. 2). При этом предельная граница допустимых состояний электропривода составлена из отдельных отрезков, учитывающих следующие ограничения: АБ – по скорости движения транспортного средства, БВ – по максимальной мощности, отбираемой электроприводом прицепа от мощности основного (дизеля, турбины) теплового двигателя, ВГ – по максимальному допустимому моменту (и току) тягового электродвигателя. Точка N на характеристике соответствует номинальному режиму (скорости и току) тягового электродвигателя прицепа.
Контуры регулирования фазных токов статора КРТФ (их шесть по числу фаз статора) представлены на модели двумя параллельными каналами регулирования: тока возбуждения i в и тока якоря I я . Витки фазных обмоток статора, расположенные над межполюсным промежутком ротора, в рамках данной работы названы обмоткой возбуждения ОВ, они создают магнитный поток возбуждения двигателя, направленный по продольной магнитной оси ротора, а витки, расположенные над полюсом и обозначенные ЯЦ (аналогично якорной
* Работа выполнялась при финансовой поддержке стипендии Президента РФ (СП-1495.2013.1) по научной проблеме «Электропривод с синхронной реактивной машиной независимого возбуждения».
цепи двигателя постоянного тока), создают вращающий момент. На возможность такой трактовки принципа работы синхронного реактивного двигателя впервые указал H. Weh [8], он же указал и на необходимые условия полноценного разделения функций этих обмоток: полный шаг обмотки и многофазность цепей статора.
Большие потенциальные возможности электропривода с этим двигателем были подробно раскрыты в работах T. Lipo [6, 7], а позднее – в отечественных публикациях [10–16].
Исходные параметры звеньев, их численные значения указаны в таблице.
Взаимодействие колес прицепа с грунтом представлено на структурной схеме электропривода (рис. 1) интегрирующим упругим звеном УЗ с постоянной времени ТУЗ, охваченным местной отрицательной обратной связью через скольжение СК, которое учитывает наличие пробуксовки в двигательном режиме и юза – в тормозном. В относительных единицах эта часть структурной схемы составлена на основании уравнения, аналогич- ного предложенному в своё время Д.П. Морозо- вым [17]:
f T Ja'k v △ 'a.
* узр
Здесь Vo - линейная скорость рамы прицепа;
VK -угловая скорость движения электропривода, приведенная к окружной скорости свободного (не-деформированного) колеса; △ VCK - линейная скорость скольжения; F - сила тяги прицепа; ТУЗ -постоянная времени интегрирующего звена УЗ;
d р = —операторный символ дифференцирования.
Строго говоря, зависимость скорости сколь- жения от силы сцепления колеса с грунтом △ VcK = f (F) носит нелинейный и нестабильный характер [4]. Сначала по мере роста усилия сцепления увеличивается и скорость скольжения. Это – зона упругого, или эксплуатационного скольжения (зона ОА на кривой 1, рис. 3), которая неизбежно наблюдается у всех транспортных машин (электровозов, тракторов, автомобилей), работающих в тяговом режиме. В точке А происходит нарушение
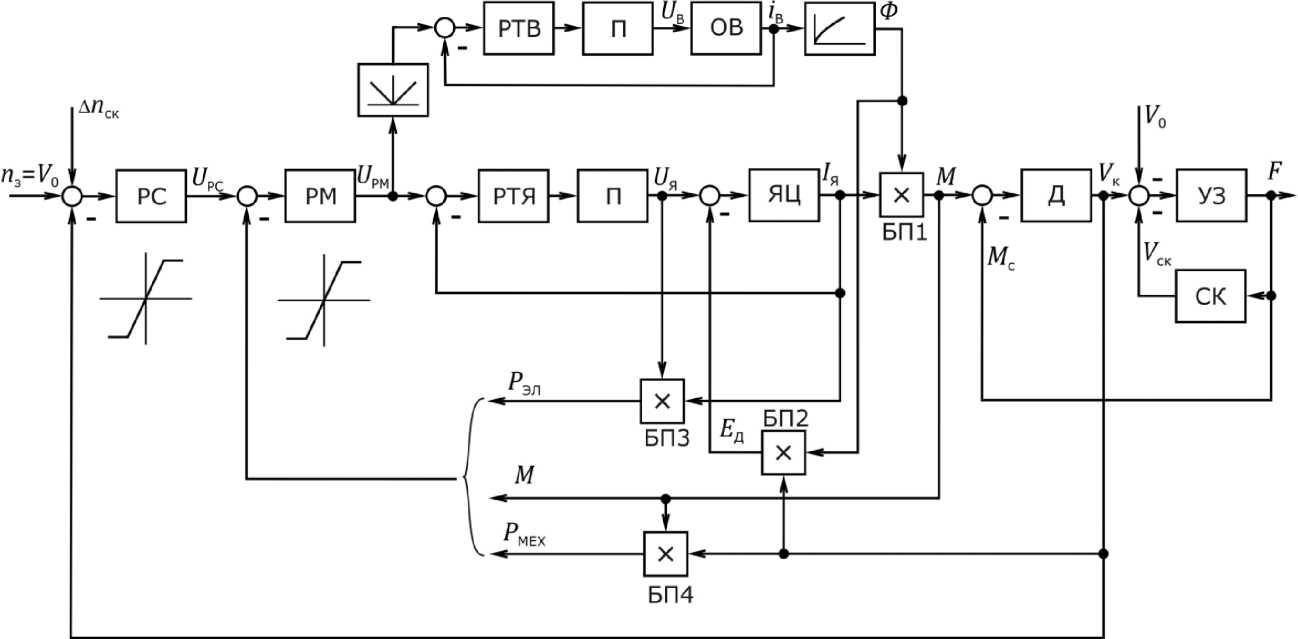
Рис. 1. Структурная схема электропривода активного прицепа
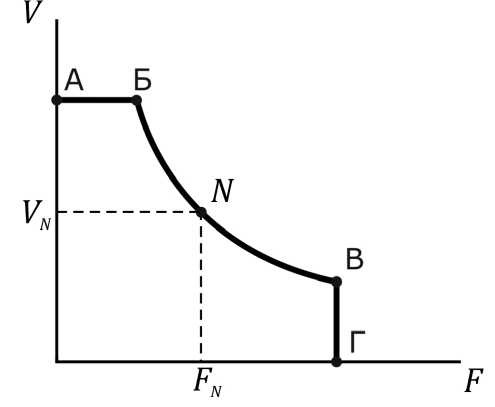
Рис. 2. Тяговая характеристика электропривода активного прицепа: линейной скорости прицепа V от силы тяги F
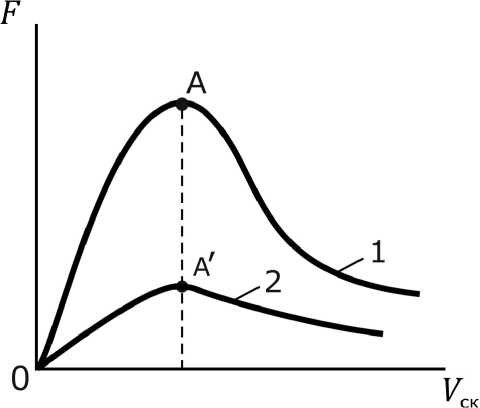
Рис. 3. Зависимость силы сцепления F от скорости скольжения V СК
Передаточные функции и параметры звеньев электропривода
Результаты моделирования
На первом этапе моделирования выполнялась настройка контуров регулирования с использованием типовых методов синтеза регуляторов многоконтурной линейной системы регулирования, выполненной по подчиненному принципу [16]. Внутренние контуры регулирования: контуры регулирования фазных токов КРТЯ и КРТВ, контуры регулирования момента КРМ и мощности КР P эл и КР P мех – настраивались ПИ-регуляторами, а внешний КРС – пропорциональным регулятором скорости. Качество настройки каждого контура оценивалось по виду переходной функции. При этом в контурах КРТЯ, КРТВ и КРМ процессы были монотонными, а в КРС – допускалось незначительное (до 15 %) перерегулирование. Определялись также частотные характеристики контуров регулирования, соответствующие их разомкнутому и замкнутому состоянию. Достигнутые динамические показатели контуров, оцениваемые их частотами среза, приведены в таблице.
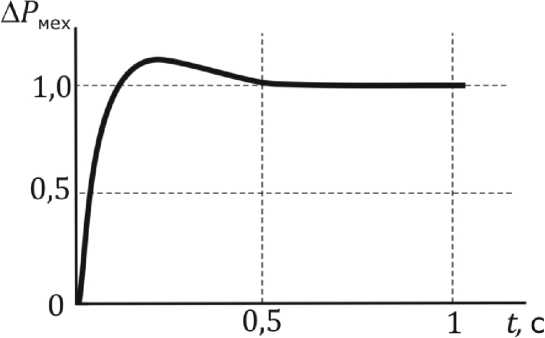
Особо следует остановиться на некоторых особенностях настройки контура регулирования мощности. Диапазон изменения момента М в режиме постоянства мощности в современных тяговых электроприводах очень широк (до 1:10 и более), что вызывает трудности при настройке электропривода с обратной связью по Рмех. Сказанное подтверждают переходные функции контура КР Pмех, рассчитанные на модели для двух текущих значений момента, соответствующих работе электропривода вблизи точек N и А на тяговой характеристике (рис. 4). Если контур КРPмех настроить на монотонный характер переходной функции (см. рис. 4, а) при работе электропривода вблизи точки N, то при работе его вблизи точки А переходная функция носит колебательный характер (рис. 4, б) и даже может соответствовать неустойчивому режиму.
Реализация обратной связи по Рэл в контуре регулирования мощности названных недостатков не содержит (рис. 5 для тех же режимов работы электропривода). Это следует объяснить, во-первых, значительно меньшим диапазоном изменения величин-сомножителей ия и 7я в выражении для Рэл и, во-вторых, меньшим числом инерционностей в каналах выделения сигналов по ия и 1я.
На рис. 6 показана переходная функция контура регулирования скорости. Перерегулирование не превышает 10 %.
а)
Рис. 4. Переходные функции контура регулирования P mech : а) при работе электропривода вблизи точки N ; б) то же вблизи точки А
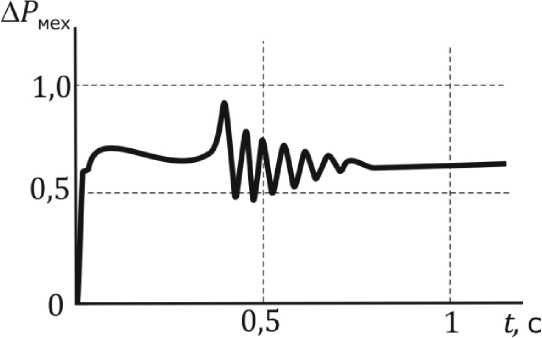
б)
АРЭЛ
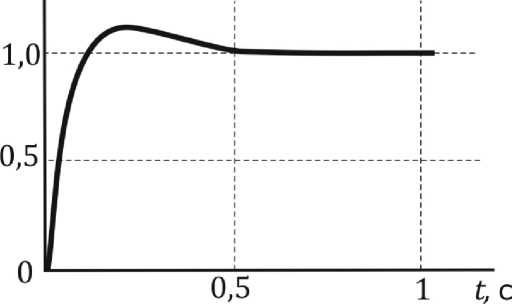
Рис. 5. Переходная функция контура регулирования PЭЛ при работе электропривода вблизи точки А
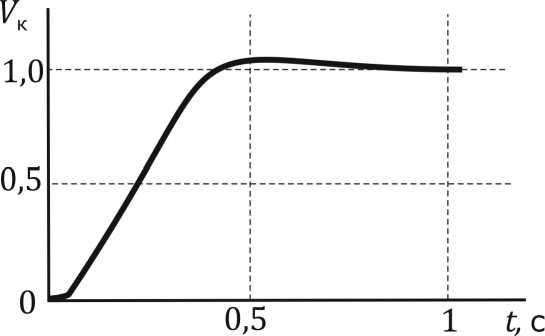
Рис. 6. Переходная функция контура регулирования скорости
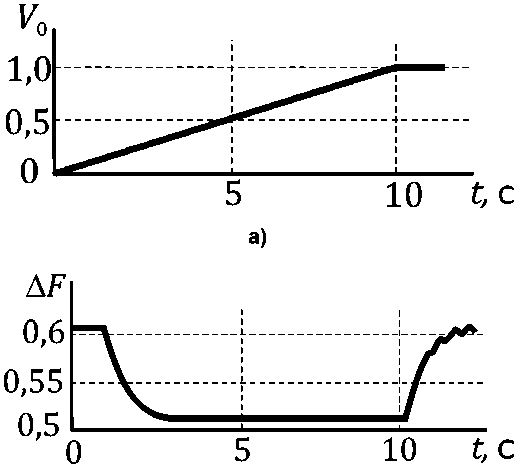
При моделировании процесса разгона автопоезда рассматривалось условие формирования этого режима (рис. 7): при изменении скорости Уо строго по линейному закону. Как следует из осциллограмм разгона автопоезда от нуля до Уо = 10 м/с за время At = 10 с, на участке установившегося режима разгона наблюдается динамическое падение тягового усилия F со стороны прицепа примерно на 10% от номинального значения.
Режим гололедицы на дороге моделировался резким (скачкообразным) сбросом тягового усилия F от номинального значения до нуля воздействием на звено УЗ. При этом регулятор РС переходил из насыщенного состояния, в котором он нормально находился при работе электропривода в режиме ограничения момента M или мощности P , на линейный (наклонный) участок своей статической характеристики. Тем самым ограничивалась величина превышения скорости электропривода над скоростью платформы. Величину этого превышения можно изменять, воздействуя на величину коэффициента усиления П-канала в регуляторе РС или величину поправки Ди ск на входе системы. Осциллограммы на рис. 8 указывают на величину превышения скорости в пределах 5…10 % от базового значения, что следует признать вполне удовлетворительным результатом.
Заключение
-
1. Предложена математическая модель тягового электропривода с синхронным реактивным двигателем независимого возбуждения, которая адекватно отражает особенности функционирования двигателя в тяговом режиме и учитывает особенности процессов взаимодействия колеса с грунтом как в режимах обычного движения транспортного средства, так и при срывах во время пробуксовки или юза.
-
2. Электропривод с синхронным реактивным двигателем независимого возбуждения полностью удовлетворяет требованиям тягового режима. Наряду с общеизвестными преимуществами: бескон-тактностью, механической прочностью, возможностью реализации больших перегрузок по тяговому усилию, – следует указать на высокое качество процессов регулирования.
-
3. Показана целесообразность применения многоконтурной структуры подчиненного регулирования для тягового электропривода активного прицепа, которая обеспечивает высокое качество режимов ограничения предельных значений регулируемых координат при сравнительно простой и малозатратной процедуре наладки.
-
4. Настройка тягового электропривода в режиме ограничения мощности сопряжена с изме-
б)
Рис. 7. Переходные процессы изменения скорости (а) и приращения тягового усилия (б) при разгоне автопоезда по линейному закону
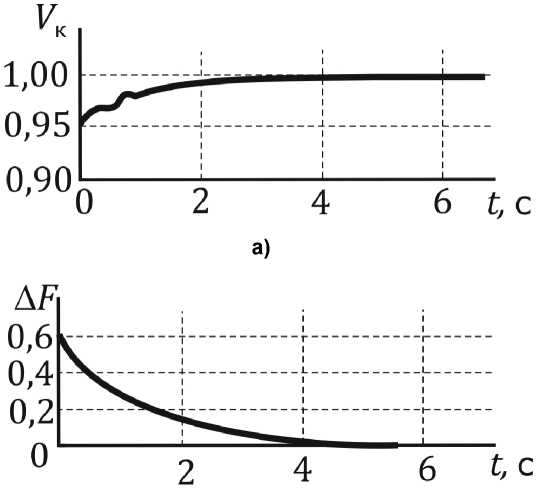
б)
Рис. 8. Переходные процессы изменения скорости V k (а) и тягового усилия F (б) при резком снижении сил сцепления между колесом и грунтом
няющейся величиной контурного коэффициента усиления, что при большом (до 1:10 и более) диапазоне изменения момента может вызвать нарушение условий устойчивости контура и потребовать корректировки. Настройку контура следует начинать, создавая условия, соответствующие работе электропривода на максимальной скорости. Обратную связь в контуре регулирования мощности нецелесообразно вводить по Рмех , измеряя момент и скорость, более предпочтительно выполнять её по Рэл, измеряя напряжение и активную составляющую тока статора (якоря).
Список литературы Моделирование электропривода активного прицепа
- Тяговый электропривод активного прицепа трубовоза/Ю.С. Усынин, А.Н. Шишков, А.Н. Горожанкин и др.//Вестник ЮУрГУ. Серия «Энергетика». -2013. -Т. 13, № 1.-C. 137-143.
- Усынин, Ю.С. Теория автоматического управления: учебное пособие для вузов/Ю. С. Усынин. -Челябинск: Издат. центр ЮУрГУ, 2010. -176 с.
- Борцов, Ю.А. Электромеханические системы с адаптивным и модальным управлением/Ю.А. Борцов, Н.Д. Поляхов, В.В. Путов. -Л.: Энергоатомиздат, 1984. -216 с.
- Антонов, А.С. Силовые передачи колесных и гусеничных машин. Теория и расчёт/А.С. Антонов -Л.: Машиностроение (Ленинградское отделение), 1975. -480 с.
- Теория электрической тяги/В.Е. Розенфельд, И.П. Исаев, Н.Н. Сидоров, М.И. Озеров. -М.: Транспорт, 1995. -294 с.
- Lipo, T. Advanced Motor Tecnologics: Converter Fed Machines/T. Lipo//IEEE Trans. -1997. -N. 7. -P. 204-222.
- Law, J.D. Design and Performance of Field Regulated Reluctance Machine/J.D. Law, A. Cher tok, T.A. Lipo//IEEE Trans. on Industry Applications. -1994. -№ 5. -P. 1185-1193.
- Weh, H. On the Development of Inverter Fed Reluctance Machines for High Pover Densities and High Outp/H. Weh//ETZ Archiv. -Bd. 6. -1984. -P. 135-144.
- Развитие частотных методов синтеза электроприводов с синхронными электрическими машинами/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков и др.//Вестник ЮУрГУ. Серия «Энергетика». -2011. -Вып. 16. -№34(251). -C. 21-27.
- Усынин, Ю.С. Частотные характеристики канала регулирования момента в синхронных электроприводах/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков//Электричество. -2012. -№ 4. -С. 54-59.
- Усынин, Ю.С. Вентильный электропривод с синхронной реактивной машиной независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков//Электротехника. -2013. -№ 3. -С. 37-43.
- Электропривод с синхронным реактивным двигателем независимого возбуждения/Ю.С. Усынин, Н.Д. Монюшко, Г.В. Караваев, М.А. Григорьев//Вестник Южно-Уральского государственного университета. Серия «Энергетика». -2001. -Вып. 1. -№4(4). -С. 70-76.
- Синтез системы управления электроприводом с синхронной реактивной машиной независимого возбуждения/Ю. С. Усынин, М.А. Григорьев, А.Н. Шишков и др.//Вестник ЮУрГУ. Серия «Энергетика». -2012. -Вып. 18. -№ 37(296). -C. 38-41.
- Потери в регулируемых электроприводах при разных законах управления/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков и др.//Вестник ЮУрГУ. Серия «Энергетика». -2010. -Вып. 13. -№ 14(190). -С. 47-51.
- Электроприводы с синхронной реактивной машиной независимого возбуждения для станов холодной прокатки труб/Ю.С. Усынин, С.П. Лохов, М.А. Григорьев, Е.В. Белоусов.//Вестник ЮУрГУ. Серия «Энергетика». -2012. -Вып. 17. -№ 16(275). -C. 107-110.
- Усынин, Ю.С. Системы управления электроприводов: учебное пособие для вузов/Ю.С. Усынин. -2-е изд., испр. и доп. -Челябинск: Изд-во ЮУрГУ, 2004. -328 с.
- Морозов, Д.П. К теории электромеханических процессов станов холодной прокатки/Д.П. Морозов//Вестник электропромышленности. -1944. -№ 3. -С. 16-19.
- Дудкин, М.М. Однофазные обратимые преобразователи напряжения для улучшения качества электрической энергии в сетях ограниченной мощности/М.М. Дудкин//Практическая силовая электроника. -2012. -№ 2 (46). -C. 19-27.
- Дудкин, М.М. Динамические спектральные характеристики развертывающих преобразователей с широтно-импульсной модуляцией/М.М. Дудкин, Л.И. Цытович, О.Г. Брылина//Практическая силовая электроника. -2012. -№ 4 (48). -С. 49-55.
- Адаптивная интервало-кодовая двоично-десятичная интегрирующая синхронизация сис тем управления силовыми вентильными преобразователями/Л.И. Цытович, О.Г. Брылина, М.М. Дудкин, Р.М. Рахматулин//Электротехника. -2013. -№ 3. -С. 8-15.
- Интегрирующие развертывающие преобразователи с повышенной температурной стабильностью характеристик/Л.И. Цытович, М.М. Дудкин, А.В. Качалов и др.//Приборы и системы. Управление, контроль, диагностика. -2010. -№ 10. -С. 38-43.
- О новом принципе интегрирующего аналого-цифрового преобразования с бестактовым поразрядным уравновешиванием/С.П. Лохов, Л.И. Цытович, М.М. Дудкин и др.//Вестник ЮУрГУ. Серия «Энергетика». -2012. -Вып. 18. -№ 37 (296). -С. 97-106.
- Система регулирования температуры и непрерывного контроля сопротивления изоляции электротехнических изделий в процессе их термической обработки/Л.И. Цытович, Р.М. Рахматулин, О.Г. Брылина и др.//Приборы и системы. Управление, контроль, диагностика. -2012. -№ 8. -С. 45-50.
- Реверсивный тиристорный преобразователь для систем управления с питанием от сети с нестационарными параметрами/Л.И. Цытович, Р.М. Рахматулин, М.М. Дудкин, А.В. Качалов//Практическая силовая электроника. -2009. -№ 2 (34). -С. 35-41.
