Моделирование электропривода на основе трехфазного асинхронного двигателя с частотным управлением

Автор: Гуляева Анна Афанасьевна
Журнал: Горные науки и технологии @gornye-nauki-tekhnologii
Статья в выпуске: 12, 2012 года.
Бесплатный доступ
В данной работе сделан анализ асинхронного двигателя с короткозамкнутым ротором и исследованы его переходные процессы, пусковые свойства. Поставленная задача реализована в наглядном и эффективном средстве визуального программирования моделей - пакете Simulink программы MATLAB.
Асинхронный электродвигатель c короткозамкнутым ротором, математическая модель, переходные процессы, метод пространственного вектора, вращающаяся система координат
Короткий адрес: https://sciup.org/140215440
IDR: 140215440 | УДК: 622.002.5
Текст научной статьи Моделирование электропривода на основе трехфазного асинхронного двигателя с частотным управлением
Современные системы векторного управления прошли долгий путь развития и в настоящее время являются наиболее распространенными среди систем электропривода переменного тока. Они позволяют просто и эффективно управлять такими сложными объектами как асинхронный двигатель с короткозамкнутым ротором (АКЗ), что в свою очередь, позволяет существенно расширить область его применения, почти полностью вытесняя из автоматизированных управляемых приводов двигатели постоянного тока. Это связано в первую очередь с развитием силовой электроники, позволяющей создавать надежные и относительно дешевые преобразователи, а также с развитием быстродействующей микроэлектроники, способной реализовать алгоритмы управления практически любой сложности. Поэтому высококачественный асинхронный векторный электропривод (АВП) в настоящее время является по существу техническим стандартом.
Асинхронный двигатель с короткозамкнутым ротором (АКЗ) уже около 100 лет используется и будет использоваться как практически единственная реализация массового нерегулируемого электропривода, составляющего до настоящего времени более 90% всех промышленных электроприводов. В последнее десятилетие благодаря успехам электроники (преобразователи частоты) короткозамкнутый асинхронный двигатель стал основой частотно-регулируемого электропривода, успешно вытесняющего доминировавший ранее электропривод постоянного тока во многих сферах.
Применение такого электропривода особенно важно для решения задачи автоматизации ленточных конвейеров. В силу специфических условий работы электрооборудования на горных предприятиях электропривод постоянного тока практически не находит применения в качестве привода ленточных конвейеров. Абсолютное большинство действующих в стране конвейерных установок снабжено электроприводом на основе асинхронного двигателя с короткозамкнутым (АКЗ) и с фазным ротором (АДФ). Существуют схемы электроприводов на основе АКЗ и
АДФ, которые применяются или могут найти в будущем широкое применение в горной промышленности.
Обобщенный асинхронный двигатель с трехфазной обмоткой на статоре и трехфазной обмоткой на роторе изображен на рис. 1. Модель асинхронной электрической машины составим согласно известному методу, приведенному в работах [1, 2, 4].
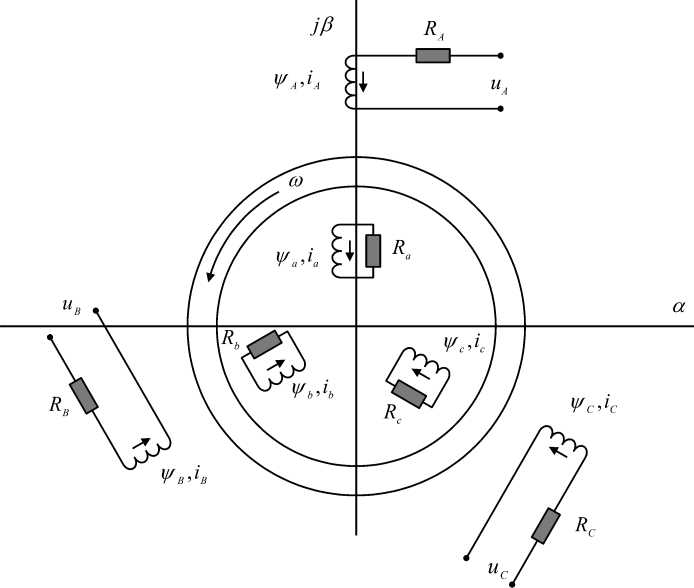
Рис. 1. Обобщенная асинхронная машина.
Обмотки статора и ротора в общем случае подключены к симметричным трехфазным источникам напряжения.
Уравнения равновесия ЭДС на обмотках статора и ротора базируется на втором законе Кирхгофа.
|
Для статора: |
Для ротора: |
|
|
dA uA RAiA , dt |
ua Raia +d a , dt |
|
|
u Ri - + d^ B uB RBiB , dt |
d^ь ub Rbib + , dt |
> (1) |
|
d^с u RCiC + . C C C dt |
d^с u Ri+ c cc . dt |
В уравнениях (1) фигурируют мгновенные напряжения, токи и потокосцепления статора и ротора, а также активные сопротивления обмоток. Обычно обмотки выполняются симметричными, и поэтому R А =R В =R С =Rs - активное сопротивление статорной обмотки, R а =R b =R с =R R - активное сопротивление роторной обмотки.
Вторым используемым законом является закон Ампера, который связывает потокосцепления обмоток с токами, протекающими по обмоткам:
Для статора:
VA = LaA'A ^L A^ i B ^LAC^C ^LAa^a ^"LAbb "^LAc k ,
^B -L B^-A "^LBB-B "^LBb-C "^LBba ^L^bb + L Bc i c , > A ~ LCA - A ^L^B^B ^LCC^C ^LCak + L Cb - b +Lcbc • , Для ротора:
(2а)
V a = L aA i A L aBB + LaC i C ^L aa^a + L ab i b + Labc ,
W b = L bA i A + LbB i B + LbC i C + L ba i a + L bb i b + L bc i c , >
(2б)
показывают, что
Vc = L cA i A +LcB^B + L cck + L cba + L cb i b + Lcc i c • ,
Уравнения для определения потокосцеплений потокосцепление каждой обмотки зависит от токов во всех обмотках; эти зависимости проявляются через взаимоиндукцию. В уравнениях (2) LAA, Lbb, LCC, Laa, Lbb, Lcc, являются собственными индуктивностями соответствующих обмоток, все остальные - взаимоиндуктивностями между соответствующими обмотками.
Третьим законом, лежащим в основе анализа, является второй закон Ньютона - закон равновесия моментов на валу машины:
j^ m= M-M С , (3)
dt где J (кг-м2) — момент инерции на валу машины, учитывающий инерционность как самой машины, так и приведенной к валу rad инерционности рабочего механизма и редуктора, ют(—) - угловая
с скорость вала машины, M с(Н м) - момент нагрузки рабочего механизма, приведенный к валу, в общем случае он может быть функцией скорости и угла поворота.
Наконец, четвертым и последним законом, лежащим в основа анализа машины, является закон, сформулированный Ленцем, как правило левой руки. Этот закон связывает векторные величины момента, потокосцепления и тока:
M = k (у Ai ) . (4)
Следует сразу подчеркнуть, что, несмотря на полное и строгое математическое описание, использование уравнений (1) - (4) для исследования машины встречает серьезные трудности. Из них основные:
-
- в уравнениях (3 и 4) фигурируют векторные величины, а в уравнениях (1 и 2) скалярные;
-
- количество взаимосвязанных уравнений равно 16, а количество коэффициентов - 44;
-
- коэффициенты взаимоиндукции между обмотками статора и ротора в уравнениях (2) являются функцией угла поворота ротора относительно статора, то есть уравнения (2) являются уравнениями с переменными коэффициентами;
-
- уравнение (4) является нелинейным, так как в нем перемножаются переменные.
На пути упрощения математического описания асинхронной ма-шины, да и вообще всех машин переменного тока, удивительно удачным и изящным оказался метод пространственного вектора , который позволил существенно упростить и сократить вышеприведенную систему уравнений; метод позволяет связать уравнения (1-4) в единую систему с векторными переменными состояния. Суть метода состоит в том, что мгновенные значения симметричных трехфазных переменных состояния (напряжения, токи, потокосцепления) можно математически преобразовать так, чтобы они были представлены одним пространственным вектором.
Это математическое преобразование статора):
i = (i A iA^aiB^a i C ),
имеет вид (например, для тока
24 j 2 j где a e 3 , a e 3
—
векторы,
смещение обмоток, i I cos t ,
учитывающие пространственное iB = Im COS(®t - —), ic = Im cos^t + —) -
симметричная трехфазная система токов статора.
Подставив в уравнения (5) значение мгновенных токов, найдем математическое описание пространственного вектора статорного тока:
i S I (cos t e 3 cos( t ) e 3 cos( t )) I e j t .
На рис. 2.1 представлена геометрическая интерпретация пространственного вектора тока - это вектор на комплексной плоскости с модулем (длиной) I m , вращающийся с угловой скоростью (о в положительном направлении. Проекции вектора i s на фазные оси А, В, С определяют мгновенные токи в фазах. Аналогично пространственными векторами можно представить все напряжения, токи и потокосцепления, входящие в уравнения (1.1), (1.2).
Теперь можно переходить к упрощению уравнений.
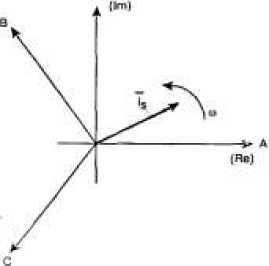
Рис. 2. Пространственный вектор тока.
Шаг первый. Для преобразования уравнений (1) в мгновенных значениях к уравнениям в пространственных векторах умножим их на
2-
2 -2
выражения: первые уравнения на -, вторые - на j a , третьи - на - а , - и
сложим раздельно для статора и ротора. Тогда получим: d u S — Rg iS "I,
S dt d ur=Rrir-\--, ^
dt
S =LSis+Lm Ф)iR ,
V R =Lm Ф) IS+LRIR ,, где LS, Lr - собственные индуктивности статора и ротора, Lm(9) - взаимная индуктивность между статором и ротором. Таки образом, вместо двенадцати уравнений (1)-(2) получено лишь четыре уравнения (7).
Шаг второй. Переменные коэффициенты взаимной индукции уравнениях для потокосцеплений (7) являются результатом того, что уравнения равновесия ЭДС для статора записаны в неподвижно системе координат, связанной со статором, а уравнения равновесия ЭДС для ротора записаны во вращающейся системе координат, связанной с ротором.
Метод пространственного вектора позволяет записать эти уравнения в единой системе координат, вращающейся произвольной скоростью к. В этом случае уравнения (7) преобразуются к виду:
d
U S =RS i S+—-S + y ty^ S , dt
d
UR =RrIr +---R + J (ta k - O)RR A dt
У S ^SiS+LjR ,
^ R=LmiS+LRiR , , где о = рчйm, р - число пар полюсов в машине.
В уравнениях (8) все коэффициенты являются величинами постоянными, имеют четкий физический смысл и могут быть определены по паспортным данным двигателя, либо экспериментально.
Шаг третий. Этот шаг связан с определением момента. Момент в уравнении (4) является векторным произведением любой пары векторов. Из уравнения (8) следует, что таких пар может быть шесть ( i s , i R ); (у s , y/R ); (i s , ^ s ); ( i s , i^R ); (I r , yS ); ( i R , ^ R ) . Часто в рассмотрение вводится потокосцепление взаимной индукции Lmi=Lm ( 1s+1 r ) . В этом случае появляется ещё четыре возможности представления электромагнитного момента машины через следующие пары:
( is , ^); ( I r , ym ); (^ s , ym ); (у/ r , ^ m ) . После выбора той или иной пары уравнение момента приобретает определенность, а количество уравнений в системе (8) сокращается до двух. Кроме того, в уравнениях (3) и (4) векторные величины момента и скорости могут быть заменены их модульными значениями. Это является следствием того, что пространственные векторы токов и потокосцеплений расположены и плоскости, перпендикулярной оси вращения, а векторы момента и угловой скорости совпадают с осью. В качестве примера запись уравнений момента
через некоторые пары переменных состояния машины имеет вид:
,, 3 , _ - ♦
M = -pLm -Mod ( is X iR ),
_ 3 x
M = pp-Odod(y/s x is ),
M = pP^R MOod(y/R x is ).
В конечном виде уравнения обобщённой асинхронной машины
имеют вид:
d uS RSiS S j k S , dt
d uR RRiR R j( k p m) R, dt
S LS i S Lm i R ,
R Lm i S LR i R ,
M p k Mod ( i k ),
J d m M M .
dt С
Уравнения асинхронной машины с короткозамкнутым ротором или машины с фазной обмоткой, если к ней не подключено питающее напряжение, можно получить из уравнений (10), если в этих уравнениях
положить U r = 0 .
d us =Rsis +—— + j®ky/s, dt
d
-
0 = R R i R +—-R + j (® k- pO m )v R , dt
-
У7 s = Lsis +LmiR ,
R = Lmis +LRiR ,
M = pp-k-Mod(\Pi xik ),
-
jdlm= M-Mc .
dt С
Для динамических систем необходимо учитывать переходные электромагнитные процессы в машине. В этом случае в качестве пары переменных, описывающих машину, оставим пространственные векторы тока статора и потокосцепления ротора ( is,vR ), тогда уравнения (11) с учётом уравнений для потокосцеплений (8) после соответствующих преобразований примут вид:
-
- • . т ■ dis , • „ т *. kR - ,
-
us =rls +Ls— + jOkLSlS -—VR+jkRP®mVR , dtT
0 = kRRRRlS +—Vr ^—PR^J (tok -P®m )V R , Tdt
3 , _ -*
M = pp-kR MOd((vR x i s ),
Jd^m = M-Mc, dt
_ L2 _ _ L2 . L L, где r = Rs+ -pRRR, Ls=Ls~-pr, kR=-p, TR="pR — коэффициенты.
LR LR LR RR
Для синтеза и анализа электропривода, построенного на базе асинхронного короткозамкнутого двигателя решающим является выбор системы координат. При построении реальных систем электроприводов переменного тока практически всегда в систему управления включают преобразователи координат. Это обусловлено тем, что реализация регуляторов возможна лишь во вращающейся системе координат, а реальные токи в обмотках статора – это токи в неподвижной системе координат. Используя при математическом описании электропривода вращающуюся систему координат, удается существенно упростить описание и моделирование, так как не возникает необходимости в преобразователях из вращающейся системы и обратно, а также в преобразователях фаз 2/3 и 3/2.
Во вращающейся с относительной угловой скоростью в системе координат с вещественной осью “x” и мнимой осью “y” уравнения (12) в операторной форме запишутся в виде:
k usx = r(1 + Tss)lsx - KL:Lsysy -^RVRx- kRPtomVRy,
TR uSy = r(1 + TSs) lSy + KrI^sXsx -bRVRy^" kRPtomVRx
T R
-
0 = kkRRisXsx + 1- R^. "^V. - (®k - P®m ) ^Ry ,
T R
-
0 = kkRRsySy + 1- RyRys s^Ry + (®k - pom ) ^Rx , T R
-
m = L5 Pk R ( Wsy -VRy i Sx ) ,
Js M M .
Структурная схема АКЗ и ее модель зависит от выбора базового вектора, который определяет скорость вращения координат. За базовый вектор принимается тот, который при анализе совмещается с одной из осей системы координат.
Так если за базовый вектор принять вектор u , то система координат будет вращаться со скоростью й) равной угловой частоте напряжения питания. Кроме того, если совместить вектор u с осью x вращающейся системы координат, то в уравнениях (13) следует принять usx U 1 , usy 0.
k
U 1 r (1 T S s ) i Sx 1 L S i Sy Rx kRp (О m У Ry ,
T R
0 r (1 + TS s ) iSy 1 LS iSx R -^Ry +k R p (О mW Rx
T R
0 kRRRiSx +1 -VRx +s^ Rx ( (О 1 p(Оm ) VRy , (14)
T R
0 k R R R i Sy +1-^ Ry +sVRy +( (У1 p(Оm )^ Rx ,
TR m 1.5 pkR (V RxiSy -V RyiSx ) ,
Js о mM MH .
Моделирование проведено в пакете прикладных программ Simulink.
Структурная схема, построенная по уравнениям (14) представлена на рис. 3.
Для моделирования выберем АКЗ 20HP (15kW) из библиотеки Sim Power System со следующими паспортными данными и параметрами: U 400 B , f 50 Гц, R S 0.2147 Ом., R 0.2205 Ом., LL 0.06518 Гн,
AB S R SR
L 0.06419 Гн, J= 0.102 кгм2 , p=2.
Коэффициенты, необходимые для моделирования уравнений помещены в табл. 1.
Таблица 1.
|
Коэффициенты |
r |
T S 1 |
т R |
kR |
L S |
|
Един.измерения |
Ом |
с |
с |
Гн |
|
|
Значение |
0.4285 |
0.0046 |
0.2956 |
0.9848 |
0.00196 |
Результаты моделирования представлены на рис. 4. В этой модели напряжение питания и частота, являясь переменными режима, могут изменяться независимо друг от друга.
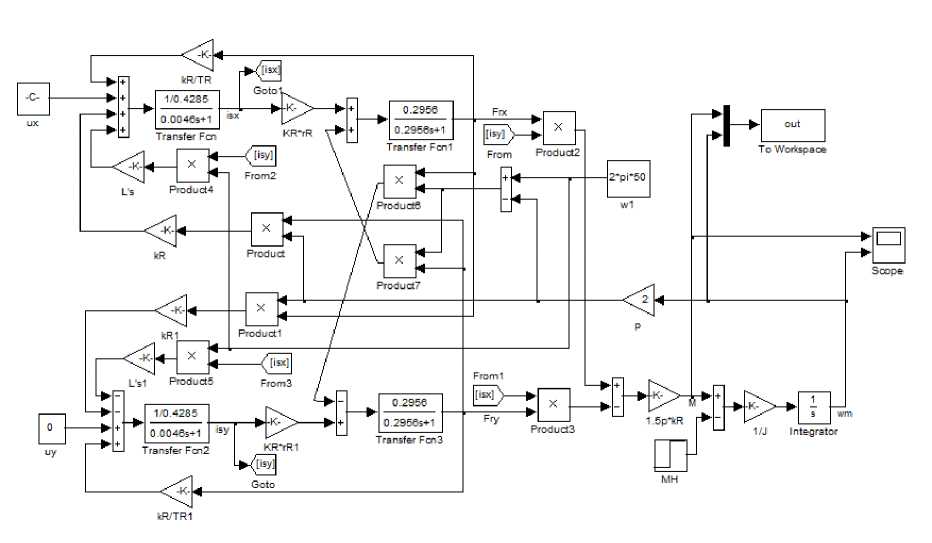
Рис. 3. Модель АКЗ во вращающейся системе координат с базовым вектором напряжения.
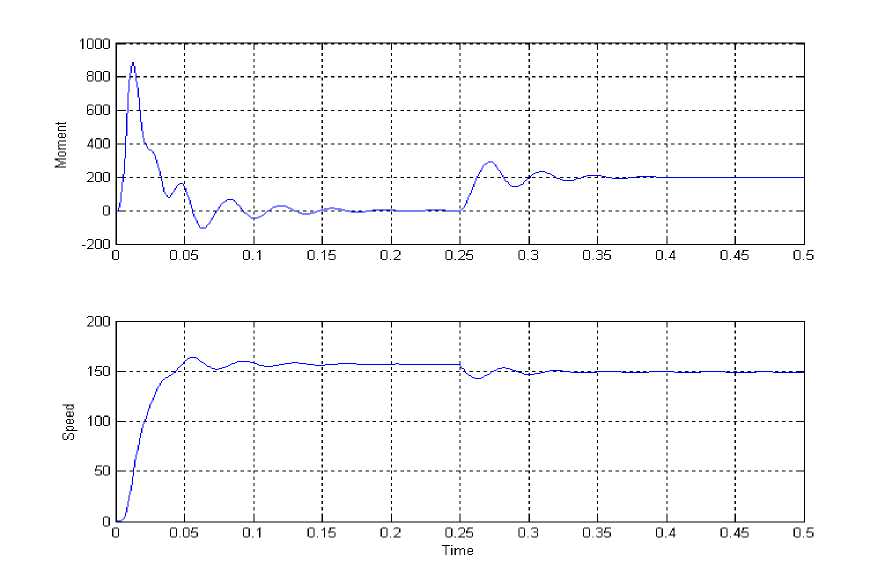
Рис. 4. Переходные процессы в АКЗ при пуске и набросе нагрузки.
Результаты моделирования, приведенные на рис. 4, показали, что при прямом пуске привода с постоянной нагрузкой наблюдаются значительные колебания момента и скорости. Кроме того, наблюдается значительное падение скорости под нагрузкой, то есть ошибка отработки задания.
Математическое описание АКЗ во вращающейся системе координат, совмещенной с вектором напряжения является основой для синтеза асинхронных систем с частотными способами управления.
асинхронный электродвигатель c короткозамкнутым ротором, математическая модель, переходные процессы, метод пространственного вектора, вращающаяся система координат three-phase asynchronous machine with a squirrel cage, mathematical model, transitional processes, method of space vector, rotating coordinate system
Список литературы Моделирование электропривода на основе трехфазного асинхронного двигателя с частотным управлением
- Герман-Галкин С.Г. Matlab&Simulink. Проектирование мехатронных систем на ПК. -СПб.: «КОРОНА Век», 2011.
- Ильинский Н.Ф. Основы электропривода. Учебное пособие для ВУЗов. -М.: МЭИ, 2003.
- Медведев В.С. Потемкин В.Г. Control System Toolbox. Matlab 5 для студентов. -М.: ДИАЛОГ -МИФИ, 1999.
- Усольцев А.А. Векторное управление асинхронными двигателями. Учебное пособие. -СПб.: НИУ ИТМО, 2002.
