Моделирование качки судна с подвешенным грузом

Автор: Соловьев А. А., Шугай С. Н.
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Рубрика: Транспорт
Статья в выпуске: 4 т.27, 2024 года.
Бесплатный доступ
Остойчивость судна определяет его способность безопасно совершать плавание при любом состоянии моря. В процессе изучения динамики судна на волнении применяется метод математического моделирования, основанный на линейной теории волн и качки. Модели позволяют получать расчетные формулы и методики, используемые для анализа качки судов, имеющих на борту смещающиеся грузы (жидкие, сыпучие, подвешенные). Влияние подвешенного груза на мореходные качества судна в настоящее время рассматривается только при решении задач статической остойчивости. При решении задач динамики предложены математические модели бортовой качки судна с подвешенным грузом на тихой воде и регулярном волнении и получены линейные дифференциальные уравнения качки судна с подвешенным грузом. Наличие на судне подвешенного груза значительно изменяет параметры качки за счет возникновения кренящего и переменного моментов инерции судна. Предложенные математические методы позволяют моделировать качку на любом регулярном волнении с учетом произвольных значений поперечной метацентрической высоты, веса груза и длины подвеса.
Качка судна, подвешенный груз, начальная остойчивость, регулярное волнение, ship motions, suspended cargo, initial stability, regular waves
Короткий адрес: https://sciup.org/142242768
IDR: 142242768 | УДК: 629.5.017.1:004.942 | DOI: 10.21443/1560-9278-2024-27-4-591-597
Текст статьи Моделирование качки судна с подвешенным грузом
DOI:
Solovyov, A. A. et al. 2024. Modeling the motion of a ship with suspended cargo. Vestnik of MSTU, 27(4), pp. 591–597. (In Russ.) DOI:
Теоретический анализ качки – колебаний плавающего судна под воздействием внешних сил – представлен в работе известного ученого XVIII в. члена Петербургской Академии наук Леонарда Эйлера "Корабельная наука", изданной в России в 1749 г. Дальнейшее развитие теория качки судна получила в многочисленных трудах отечественных и зарубежных авторов (Собрание… , 1951; Семенов-Тян-Шанский и др., 1969; Благовещенский и др., 1975; Ремез, 1983; Нечаев, 1989; Чижиумов, 1999, 2010 ).
В настоящее время при совершенствовании теории качки возникла необходимость в строгой математической формулировке задачи о динамике судна на волнении и разработке надежных теоретических методов анализа соответствующих математических моделей. Известные решения для сравнительно простых нелинейных моделей, полученных с помощью бесконечных рядов, не всегда позволяют выявить из найденных выражений наиболее важные зависимости. Исключением являются только простейшие модели, описываемые линейными дифференциальными уравнениями, для которых решение может быть представлено в замкнутой форме, т. е. в виде аналитических формул. Особенность таких моделей состоит в том, что они описывают процессы, протекающие одинаково при различных воздействиях. С увеличением интенсивности воздействия изменения остаются количественными, новые качественные изменения не учитываются.
Область применения линейных моделей, основанных на использовании метацентрических формул в задачах качки и остойчивости, очень широка. Следует отметить, что методы анализа качки и остойчивости с помощью линейных моделей схожи и эффективны при использовании.
Важной задачей при изучении характера поведения судна в морских условиях является моделирование качки судна с находящимся на нем перемещающимся грузом (жидким, подвешенным). В немногих работах, посвященных этой проблеме ( Рахманин и др., 1997; Шауб, 2013; Buchner, 2002 ), рассматривается вопрос о влиянии жидкого груза на динамику судна.
В настоящей статье предложена линейная модель качки судна с подвешенным грузом на тихой воде и регулярном волнении.
Теоретические основы
Влияние подвешенного и жидкого грузов на остойчивость (рис. 1) заключается в создании кренящего момента за счет смещения их центра тяжести при наклонении судна. В теории начальной статической остойчивости действие этого момента учитывается уменьшением восстанавливающего момента посредством введения соответствующих поправок к начальной поперечной метацентрической высоте.
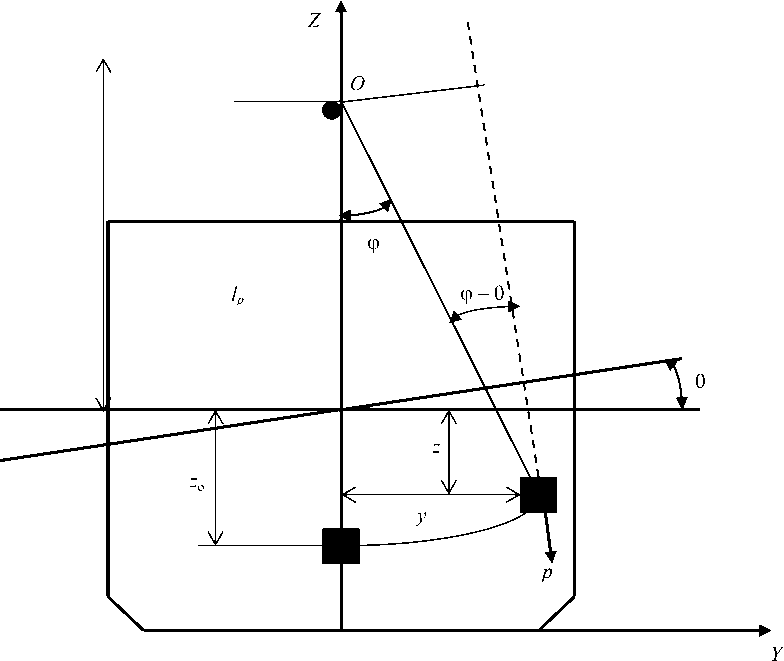
Рис. 1. Влияние подвешенного груза на остойчивость судна
Fig. 1. The influence of suspended load on the stability of a ship
Поправки вычисляются по формулам: – для подвешенного груза
5 h = - o'' •
– для жидкого груза, имеющего свободную поверхность:
5 h = - p pp
Dх где р - вес груза; D - весовое водоизмещение судна; 1р - длина подвеса; рx - метацентрический радиус цистерны или танка.
Выражения (1) и (2) идентичны, что позволяет сделать вывод об идентичности влияния на остойчивость судна жидкого груза и подвешенного твердого тела, имеющего длину подвеса, равную р x . В дальнейшем в ходе анализа параметров качки будем рассматривать только подвешенный груз, так как для замены его на жидкий достаточно длину подвеса lР заменить на метацентрический радиус цистерны, величина которого может быть вычислена по формуле
ρ
x
=ж
p
где у - удельный вес жидкости; i x - момент инерции свободной поверхности относительно ее главной центральной оси.
При рассмотрении вопроса о влиянии подвешенного груза на параметры качки судна используем линейную теорию качки корабля. Уравнение бортовой качки на тихой воде представляет собой линейное дифференциальное уравнения второго порядка
( Jx + 5 J ) 0 + 2 N e 0 + DhQ = 0, (4)
где Jx - момент инерции массы судна относительно центральной продольной оси Gx ; 5 J x - присоединенный момент инерции массы воды; 2 N э - постоянный коэффициент пропорциональности в выражении момента сил сопротивления качке; h – начальная поперечная метацентрическая высота.
Разделив уравнение (4) на множители при второй производной, получим е + 2ve0 + n;0 = 0, (5)
где ve =
N θ ,
Jx + 5JX
n =
Dh
Jx + 8JX ’
здесь v0 - коэффициент затухания; n 0 - частота собственных свободных колебаний судна.
Решение уравнения (5), написанное в тригонометрической форме, имеет вид
0 = e -
00соsю t + -( 0О + ve0o ) sin® t , о
где 00 и 0О - начальные значения угла крена и угловой скорости; частота качки с учетом сил сопротивления равна
® = № - v 0 .
Уравнение (8) определяет гармоническое затухающее колебательное движение с постоянным периодом 2π
T = — и переменной амплитудой 0О e .
ω
При составлении уравнения бортовой качки судна на тихой воде с учетом наличия подвешенного груза в уравнение (4) необходимо добавить момент инерции и момент силы веса, создаваемый этим грузом. Поэтому момент Jx будем рассматривать как сумму двух составляющих:
Jx = Jxo + Jxp, где Jxo – момент инерции массы судна без подвешенного груза; Jxp – момент инерции подвешенного груза.
Момент инерции Jxp также состоит из суммы двух составляющих: первая зависит от расположения груза относительно оси наклонения при конкретном угле отклонения от вертикали ф и является величиной переменной, вторая – собственный момент инерции массы груза:
Т _ Р( ,Р1+ + ' У
Jxp = ДzФ + yФ ’' , gg где z и у - координаты груза при заданном угле ф; lz и ly - линейные размеры груза.
Поскольку второе слагаемое является величиной постоянной, то его можно объединить с моментом инерции судна J x o .
Как видно из рис. 1, координаты центра тяжести груза при произвольном угле ф могут быть вычислены по следующим формулам:
z ф = z о - ( l p - I p cos ф ) “ z o ,
У ф = lP sin ф ~ l p Ф, где lp - длина подвеса; ф - угол отклонения линии подвеса от вертикали.
С учетом полученных зависимостей общий момент инерции массы судна будет вычисляться по формуле
Jx = Jx o + p [ z 02 + ( l p ф ) 2 ] .
Момент силы веса подвешенного груза, противоположный по знаку восстанавливающему моменту, вычисляется так:
Mp = Pl p sin ( ф - 0 ) ~ Pl p ( ф - 0 ) .
С учетом выражений (10) и (11) уравнение качки судна на тихой воде с подвешенным грузом имеет вид
Jxo + p[z2 +(lpф)2] + JJ0 + 2N00 + Dh0-plp (ф-0) = 0.(12)
I gL
Раскрывая скобки и группируя слагаемые, содержащие 0 , получим выражение
| Jxo + p [ z2 +(lp ф )2 ] + J j 0 + 2 N00 + (Dh + plp )0 - plp ф = 0.(13)
Разделив на множитель при второй производной, получим
0 + 2ve0 + ne20 - m0 ф = 0,(14)
где
Nθ
Jx o + p [ z 2 + ( l p ф )2 ] + J x g
n
Dh + plp
Jxo + p [z2 +(lpф)2 ] + JX plp
Jx o + p [ z 2 + ( l p ф ) 2 ] + J x
Из формул (15) и (16) видно, что коэффициент затухания v0 , частота собственных колебаний n 0 и зависящий от них период качки Т являются переменными величинами, так как зависят от угла ф , значение которого может быть определено из решения дифференциального уравнения качания подвешенного груза
J o ф + N ф ф + pl p ( ф - 0 ) = 0, (18)
p 2
где Jo = — l- момент инерции подвешенного груза относительно точки подвеса; Nф - постоянный gp коэффициент пропорциональности в выражении момента сил сопротивления качанию груза.
Таким образом, для расчета параметров качки судна с подвешенным грузом необходимо решение системы двух дифференциальных уравнений (14) и (18), реализовать которое можно только численными методами.
Бортовая качка судна на регулярном волнении описывается уравнением
(Jx + 8 Jx) 0 + 2N0 + Dh(0 - a) = 0,(19)
где a - текущий угол волнового склона.
После преобразования уравнение будет иметь вид
(Jx + 8 Jx) 0 + 2 N 0 + Dh0 = Dha.(20)
Угол волнового склона в данном месте и данный момент времени вычисляется по формуле a = a.sinot,(21)
2πr где а = N0 К0^а ; а =--в; ао - наибольший угол волнового склона; ат - исправленный угол mθв θTo o λ волнового склона; ^0в, ^0T - поправочные коэффициенты, учитывающие конечные размеры суда; 2rв -высота волны; X - длина волны; а - частота волны.
С учетом приведенных выражений (21), уравнение (20) принимает следующий вид:
( Jx + 8 Jx ) e + 2 N 0 + Dh0 = а„ Dh sin с t . (22)
Разделив все члены уравнения (22) на коэффициент при второй производной, приводим его к виду
0 + 2ve0 + n 2 0 = amn 2 sin c t .
Общий интеграл уравнения (23) имеет вид
0 = e vt ( C cos nt + C 2 sin nt ) + 0,
где θ – частное решение уравнения, которое определяет вынужденные колебания и находится по формуле
0 = 0m sin ( о t - 8 ) ,
здесь tg8 = 4^, n e - о
0 m = ." .
7( n 2 - о2 ) + 4v0o0
Итак, общий интеграл дифференциального уравнения бортовой качки в абсолютных координатах рассчитывается как
0 = e“vt | 0O coswt + — (0O + ve0o)sinwt | + 0m sin(оt-8).(28)
( о
Для составления уравнения, описывающего бортовую качку судна с учетом подвешенного груза, уравнение (20) необходимо дополнить моментом веса подвешенного груза и моментом инерции его массы; после преобразований данное уравнение приводится к следующему виду:
-
| Jxo + p [ z2 + (lp Ф )2 ] + 8Jx 10 + 2 N00 + (Dh + plp )0 - plp Ф = Dha.(29)
Разделив все члены уравнения (29) на коэффициент при второй производной и учитывая выражения (21), получим формулу
0 + 2ve0 + n20 - meф = amn2 sin оt,(30)
где n 2 =----------------------; коэффициенты v0, n 2 и m0 вычисляются по выражениям (15)-(17)
J.. + p [ z2 + (lp Ф )21+8J, g соответственно.
Моменты инерции J x o обычно находятся по приближенным формулам. Из опубликованных в технической литературе приближенных формул, дающих более точные результаты, наиболее часто рекомендуют:
.T D (B 2 а2 я2 ^ D
-
1) формулу Шиманского J =—--1--, где В - ширина судна; Н - высота борта;
x o g ^ 11,48 12 )
а - коэффициент полноты площади ватерлинии; 5 - коэффициент общей полноты. Формула выведена в предположении, что корпус судна представляет сплошной параболический цилиндр;
2) формулу Дуайера
■ '• o = 1 D ( B + 4 - ■),
где z g – аппликата центра тяжести судна. Формула
предполагает, что корпус судна представляет собой сплошной прямоугольный параллелепипед шириной В и высотой 2 zg ;
-
3) формулу Павленко Jxo = —B2 2 + н 2 V
x o 16 g
D 2
-
4) эмпирическую формулу Jx о + 8 Jx = — рх , где р x - приведенный радиус инерции судна с учетом g
присоединенной массы воды р ч = cB . Эмпирический коэффициент с вычисляется по рекомендованной IMO и Российским морским регистром судоходства формуле c = 0,373 + 0,023 B / d - 0,043 L^ z/100, где Lwl – длина судна по ватерлинии.
Момент инерции присоединенной массы определяется по формуле
8 Л = — (В 2 + 4 d 2) —.
-
x 12 g 10δ
Результаты и обсуждение
Уравнения (4) и (22) описывают качку судна на тихой воде и на регулярном волнении без учета момента, создаваемого подвешенным грузом; системы уравнений (14), (18) и (29), (18) – с учетом влияния подвешенного груза на кренящий момент и момент инерции суда.
Для вычислений была использована математическая модель судна водоизмещением 1 000 т, длиной 50 м, шириной 9 м; осадка 3,68 м; начальная поперечная метацентрическая высота 1,0 м.
Инклинограммы качки судна на тихой воде, полученные посредством решения уравнения (4) и системы уравнений (14), (18), показывают классические периодические затухающие колебания (рис. 2) и выраженную
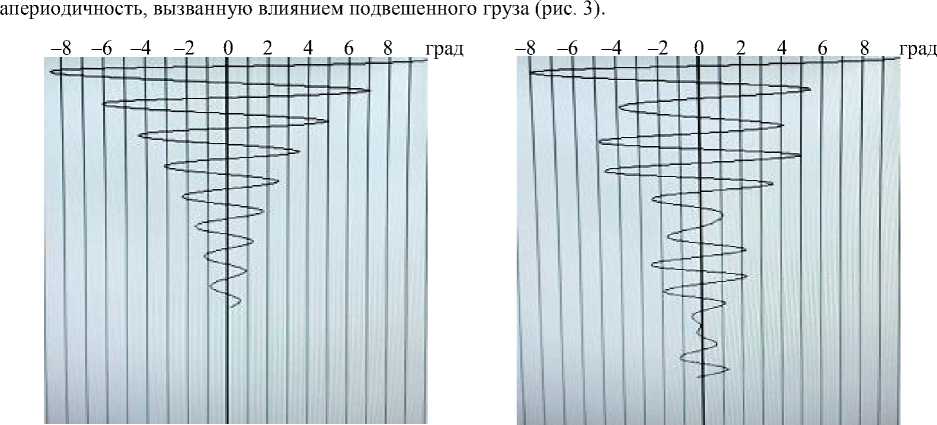
Рис. 2. Качка судна без подвешенного груза на тихой воде
Fig. 2. Rolling of a ship without suspended cargo on calm water
Рис. 3. Качка судна с подвешенным грузом на тихой воде
Fig. 3. Rolling of a ship with suspended cargo on calm water
Инклинограммы качки судна на регулярном волнении получены в результате решения уравнения (22) и системы уравнений (29), (18). Качка судна на регулярном волнении имеет постоянный период (рис. 4),
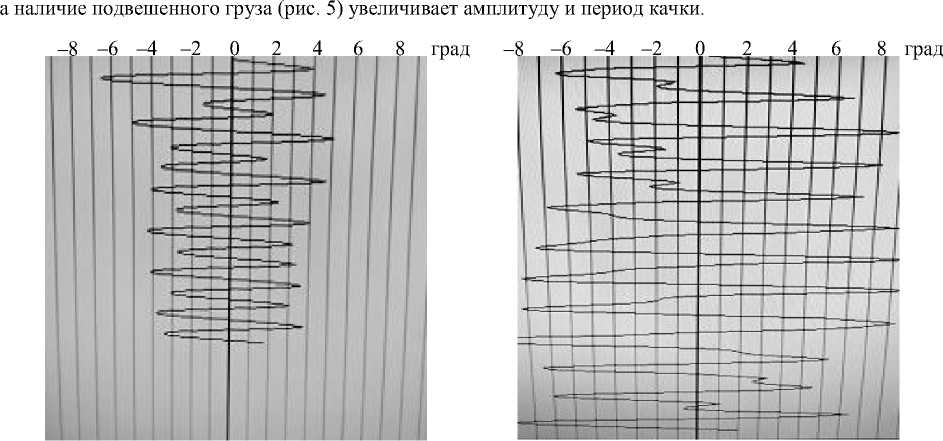
Рис. 4. Качка судна без подвешенного груза на волнении
Fig. 4. Rolling of a ship without suspended cargo in rough seas
Рис. 5. Качка судна с подвешенным грузом на волнении
Fig. 5. Rolling of a ship with suspended cargo in rough seas
Заключение
В результате исследования получены линейные дифференциальные уравнения качки судна с подвешенным грузом на тихой воде и регулярном волнении. Наличие на судне подвешенного груза значительно изменяет параметры качки за счет возникновения кренящего и переменного моментов инерции судна.
Предложенные математические методы позволяют моделировать качку на любом регулярном волнении с учетом произвольных значений поперечной метацентрической высоты, веса груза и длины подвеса.
