Моделирование качки волномерного буя

Автор: Грязин Д.Г.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Оригинальные статьи
Статья в выпуске: 1 т.11, 2001 года.
Бесплатный доступ
Приводятся результаты теоретических и экспериментальных исследований качки волномерного буя. Предложена нелинейная математическая модель его качки. Для выполнения расчетов использованы экспериментально полученные гидродинамические коэффициенты. Результаты расчета сопоставлены с характеристиками, полученными экспериментально при испытаниях буя в опытовом бассейне.
Короткий адрес: https://sciup.org/14264171
IDR: 14264171 | УДК: 629.12.073.249
Modeling of the wavemetering buoy tossing
The results from theoretical and experimental studies of the wavemetering buoy tossing are described. The nonlinear mathematical model of tossing is offered. The calculations were based on the experimentally obtained hydrodynamic factors. The results of calculations are compared to the characteristics defined experimentally at testing the buoy in the development pool.
Текст научной статьи Моделирование качки волномерного буя
Волномерные буи (ВБ) являются наиболее распространенным прибором, используемым для измерения характеристик морского волнения. В зависимости от назначения эти приборы позволяют определять статистические и спектральные характеристики волн, параметры одномерного и двухмерного спектров трехмерного волнения, а также выполняют экспресс-анализ записанной реализации. Методы измерения, используемые в этих приборах, обычно основаны на применении датчиков давления и акселерометров для измерения ординат возвышения волн, а также различных датчиков углов для измерения углов волнового склона.
При колебаниях на поверхности волны буй совершает сложные пространственные движения, обусловленные влиянием волновых и ветровых возмущений. Очевидно, что погрешность измерений характеристик волнения непосредственно зависит от того, насколько точно буй отслеживает профиль волны. В общем случае погрешности измерения ординат волн, обусловленные гидродинамическими свойствами буя, можно разделить на три группы. Первую и вторую группы составляют погрешности, обусловленные линейными и угловыми перемещениями буя относительно поверхности волны, третью — погрешности, обусловленные линейными смещениями буя относительно географической точки измерений. Указанные погрешности впрямую зависят от массо-габаритных характеристик прибора, выбор которых при проектировании ВБ необходимо производить с учетом минимизации этих погрешностей.
СИСТЕМЫ КООРДИНАТ И ПРИНЯТЫЕ ДОПУЩЕНИЯ
Рассмотрим подробнее пространственные движения цилиндрического буя. Определим систему координат, связанную с буем, как X,Y,Z и систему координат взволнованной поверхности моря как ^ , П - С - причем оси С и Z направлены вниз (рис.1).
Рис. 1. Системы координат
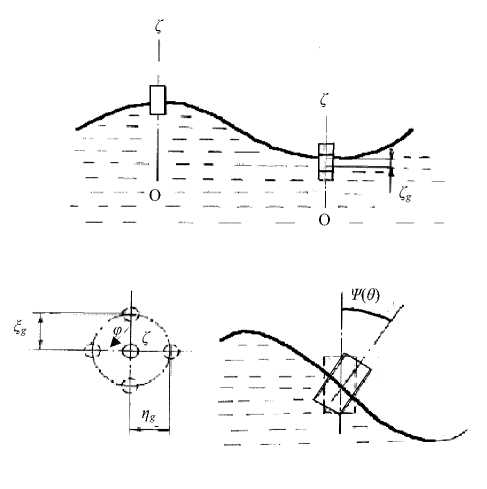
Рис. 2. Пространственные движения буя под воздействием волн
Z P — координата центра тяжести (ЦТ), Z g , Z g , n g — перемещение связанной с телом системы координат ( XYZ) относительно неподвижной ( ZZn ).
При подъеме и спуске буя со склонов волн он, как любое плавающее тело с шестью степенями свободы, совершает угловые колебания 6 относительно оси Ос в плоскости O n Z (рис-2), угловые колебания у в плоскости О Е С относительно оси O n , колебания по углу ф в плоскости О пЕ относительно оси Оζ , имеет вертикальную качку ζ g , а также совершает линейные продольные n g и поперечные E g колебания в горизонтальной плоскости.
В связи с тем что корпуса буев, как правило, симметричны относительно оси О 1 Z, в дальнейшем будем рассматривать лишь углы 6 и колебания n g , т.к. рассуждения относительно углов щ и колебаний ^ g будут аналогичными. Составим дифференциальные уравнения движения буя, используя гидродинамическую теорию качки судна.
Для этого примем следующие допущения.
-
1. Движение жидкости считается потенциаль-
- ным, что позволяет определить скорость движения любой частицы воды через производные по направлению, т.е.
-
2. Движение буя в воде считается безвихревым.
-
3. Жидкость считается тяжелой и несжимаемой.
-
4. При определении гидродинамических коэффициентов используется гипотеза плоского обтекания, а трехмерность обтекания учитывается путем введения поправок.
-
5. Гидромеханические силы разделяются на ряд составляющих.
V X
ЭФ v ЭФ v ЭФ
ЭХ ’ Y "дУ ’ Z "Э2 ’ где Ф — потенциал скорости.
К составляющим гидромеханических сил относятся следующие.
— Инерционные силы, возникающие вследствие изменения кинетической энергии жидкости, вызываемого качающимся буем на тихой воде. Эти силы пропорциональны ускорениям качки буя в первой степени. В выражениях этих сил или их моментов множители при соответствующих ускорениях называются присоединенными массами и имеют размерность масс, размерность моментов инерции масс и размерность статических моментов масс.
— Восстанавливающие, или гидростатические, силы, возникающие как реакция воды на перемещение буя и стремящиеся вернуть буй в положение, совпадающее с положением его на тихой воде. Эти силы распределены по смоченной поверхности буя.
— Силы сопротивления, или демпфирующие, силы, возникающие вследствие непрерывного рассеивания энергии качающегося буя. Эти силы, в свою очередь, можно подразделить на силы волновой и силы вязкостной природы. Первые обусловлены гравитационными свойствами воды и определяются непрерывным расходованием энергии на поддержание системы волн, распространяющихся во все стороны от качающегося буя. Силы волнового сопротивления при качке пропорциональны первой степени скорости колебаний. Эти силы, так же как и инерционные гидродинамические силы, обусловлены теми возмущениями, которые вносятся в спокойную жидкость вынужденной качкой буя. Вторые обусловлены вязкостью воды и определяются как сумма сопротивления трения и сопротивления формы, связанного с вихреобразованием.
— Возмущающие силы, возникающие вследствие непрерывной передачи бую части энергии волнующейся жидкости. Возмущающие силы делятся на две части: главную и дополнительную — дифракционную. Главная часть возмущающих сил представляет собой результирующую гидродинамических давлений, которые распределены по смоченной в данный момент поверхности буя. Эта часть сил есть следствие изменения набегающей волной формы погруженной части буя по сравнению с формой, соответствующей тихой воде, и отличия поля давлений в неискаженной буем волне от поля гидростатических давлений. Дополнительная, или как ее называют дифракционная, часть возмущающих сил представляет собой результирующую гидродинамических давлений, обусловленных возникновением отраженных волн.
Инерционные и восстанавливающие силы относятся к числу консервативных сил, и, следовательно, работа за период каждой из них порознь равна нулю.
Силы сопротивления относятся к числу диссипативных сил, и их работа (по отношению к бую) всегда отрицательна.
Возмущающие силы всегда явно зависят от времени и от элементов набегающих волн.
Восстанавливающие силы и главная часть возмущающих сил характеризуют прямое воздействие на буй окружающей его воды без учета движения жидкости, вызванного движением буя.
Инерционные, демпфирующие силы и дифракционная часть возмущающих сил являются следствием тех изменений в движении жидкости, которые обусловлены присутствием в ней качающегося буя. Таким образом, эти силы учитывают вторичное явление, т.е. обратное воздействие буя на жидкость.
МАТЕМАТИЧЕСКОЕ НЕЛИНЕЙНОЕ МОДЕЛИРОВАНИЕ КАЧКИ
Давление в жидкости при неустановившемся ее движении определяется интегралом Лагранжа—
Коши:
ЭФ 1 з
P - Р о = yZ + р — + - p V 2, (1)
d t 2
где Р - Р о— избыточное давление, Р 0 — атмосферное давление, Р — давление жидкости, р — плотность воды, V — скорость абсолютного движения жидкости, у = p g, Ф — потенциал скорости, причем Ф = Ф W + Ф д + Ф Ид . Здесь Ф w — потенциал скорости, обусловленный свободными набегающими волнами, Ф д — потенциал скорости, обусловленный присутствием неподвижного буя в жидкости, Ф Ид — потенциал скорости, который возникает от качки буя на тихой воде.
Первый член правой части уравнения (1) определяет гидростатическое давление, второй и третий члены учитывают давление, обусловленное набегающей и дифрагированной волнами. С помощью интеграла Лагранжа—Коши можно определить давление на элементарном участке поверхности погруженной части буя. Для определения силы, действующей на корпус буя, следует проинтегрировать элементарные давления по всей смоченной поверхности:
F = J(Р-Po)dS , St где St — мгновенная площадь смоченной поверхности буя, которая изменяется во времени.
Силы и моменты сил, действующие на движущийся буй при его движении в плоскости Z OZ, можно описать системой трех уравнений
F ^ = J ( Р - P о )d S cos( n Z ),
S t ^
- F = J ( Р - P о )d S cos( n Z ),
\ A A
M n = J ( Р - Р о)( X cos( nZ ) - Z cos( nX ))d S .
S t
Здесь обозначениям nZ , nn , nZ , nZ , nX соответствуют углы между нормалью к элементарному участку смоченной поверхности корпуса буя (на рис. 3 показан в форме конуса) и соответствующими осями координат, а отрицательный знак A перед слагаемым Z cos (nX) в третьем уравнении системы вызван тем, что положительный момент соответствует движению по часовой стрелке.
В соответствии с принципом Д' Аламбера пространственное движение буя может быть описано системой уравнений
( m + Xz ) Z = F z ,
-(m + Xz )Z = Fz , (2) (JY + Xn )6 = MY, где m — масса буя; Xz, X^ — присоединенные массы при колебаниях буя по соответствующим осям; Хп — присоединенный момент инерции; 6 — угол колебаний (рис. 3); JY — момент инерции относительно оси 01Y.
Для удобства вычислений разделим гидродинамические силы F z и F z , а также момент M Y на ряд составляющих, как было указано ранее:
FZ(Z) (Мп) =F1+F2+F3+F4, где F1 — гидростатическая сила (или момент), которая определяется путем интегрирования гидростатического давления по смоченной поверхности; F2 — главная часть возмущающих сил, определяемая интегрированием волнового давления по смоченной поверхности при условии, что буй не вносит искажений в волновое поле; F3 — дифракционная составляющая волнового поля, обусловленная искажениями волнового поля от присутствия буя; F4 — демпфирующая составляющая, обусловленная силой сопротивления при качке на тихой воде.
Для выполнения расчетов по выражению (2) необходимо иметь значения присоединенных масс и момента инерции буя. Значения присоединенного момента инерции при угловых колебаниях буя могут быть получены из выражения to о2
Dh
Х п + J y ’
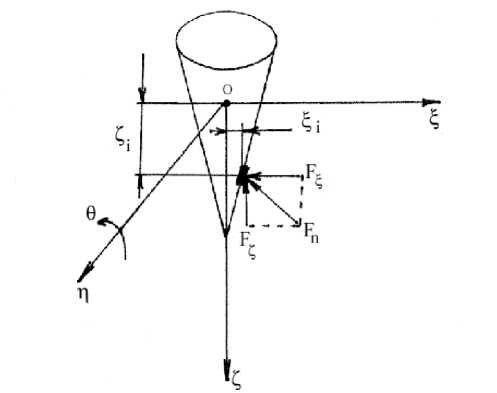
Рис. 3. Силы, действующие на буй где h — метацентрическая высота, D = mg — вес
В том случае, если масса буя равномерно рас- пределена по его объему, а угловые колебания буя в воде происходят относительно точки О (рис. 4), лежащей в центре сечения ватерлинии ВЛ, то мо- жет быть получено выражение для момента инер- ции цилиндрического буя. Для этого разобьем его корпус на элементарные объемы, каждый из кото- рых лежит между сечениями, параллельными плоскости ватерлинии, и имеет высоту dZ. Тогда выражение для элементарной массы, соответствующей этому объему, будет pnR 2dZ = dm , а элементарный момент инерции определится как d J y = dmZ2.
Момент инерции буя в целом определится из выражения
T
J y = I'd J y = Pn R !1 ( r ° - h 03 ) .
h 0 3
Заметим, что значение h0 необходимо брать с учетом знака. В связи с тем что ось Z направлена вниз (рис. 4), значение h 0 всегда будет отрицательным. Для определения метацентрической высоты необходимо рассчитать момент М восстанавливающих сил на тихой воде. На рис. 5 представлен буй в наклоненном состоянии. При его отклонении от вертикали на угол 6 объем V 1 входит в воду, а объем V 2 выходит из нее. Выделим элементарный объем dV из V1 . Толщину этого объема по оси X обозначим dX , высота Zt = X i tg 6 . Для определения Yi используем уравнение окружности радиуса R с центром в начале координат: X 2 + Y i 2 = R 2. Откуда получим Y i = ^R 2 - X2 . Тогда выражение для элементарного объема будет иметь вид:
dV = 2V R 2 - X2X tg 6 d X . (4)
Момент от этого элементарного объема равен
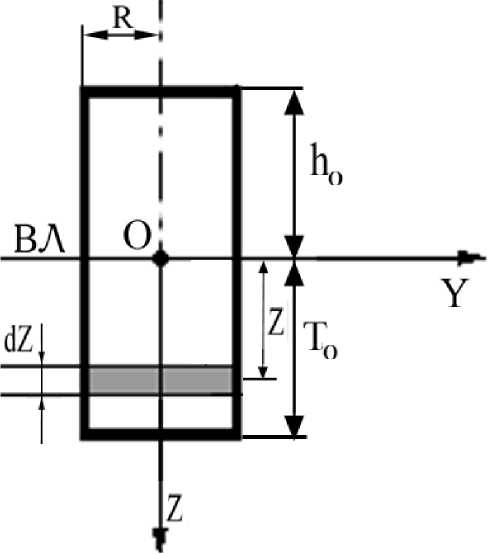
Рис. 4. Разбиение цилиндрического буя на элементарные отсеки. ВЛ — ватерлиния.
При определении момента, возникающего при наклонении буя, следует рассматривать не только объем V1 , но и объем V2 (рис. 5). В связи с тем что V 2 = V 1 , значение выражения (7) следует удвоить, кроме того, учитывая малость углов 6 , следует принять tg 6 = 6 , тогда выражение для момента примет вид:
M = 4 p g nR46 .
Значение метацентрической высоты можно определить из формулы:
M h =---
D 6
.
dM = p gX i d V . (5)
Подставляя выражения (8) и (9) в (3), получим:
Подставляя (4) в (5), получим выражение для момента, обусловленного объемом V 1 :
R
MV = pg J 2 V R 2 - X2X(2 tg 6dX(.(6)
Решение интеграла определится как
МV1 = 1 PgnR 4tg6 .
ю 2 = 0^5 p gR^ 0" А , + J y
.
Окончательно выражение для присоединенного момента инерции примет вид:
Ап = °'785ppgR4 - Jy.(10)
ю °
Таким образом, зная частоту свободных колебаний буя в воде и его геометрические размеры
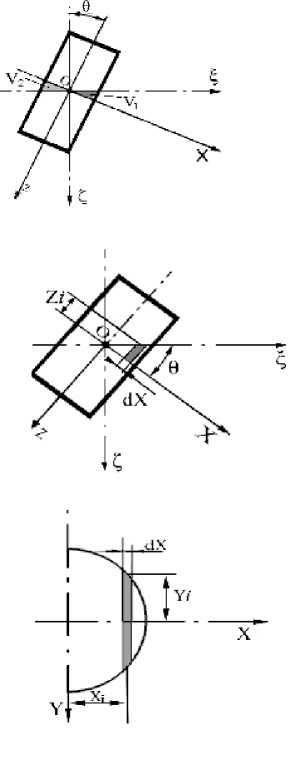
Рис. 5. Определение элементарных объемов для расчета момента восстанавливающих сил
где S m = S Ml — приращение момента инерции буя, соответствующее увеличению угла его отклонения Se от вертикали; S M — приращение массы; l — расстояние между осью качания буя и местом установки массы; коэффициент 57.3 учитывает перевод угла в радианы.
С целью определения значений а и J y по формулам (11) и (12) был произведен эксперимент по определению значений S m , Se и Т . Для этого на корпусе буя с помощью хомута была закреплена штанга с ножевыми опорами 1 (рис. 6) и площадкой 2 для установки грузов. Грузы массой 0.1 и 0.2 кг попеременно устанавливались в точки а, б, в, г , расположенные друг относительно друга на расстоянии 0.1 м. При этом точки б и в отстояли от оси качания также на 0.1 м. Угол наклона буя определялся с помощью оптического квадранта. Для буя массой 27 кг и диаметром 0.34 м значение времени Т составило 2.1 с, а J y = 0.64 кг∙м2.
Для определения значения присоединенного момента инерции и коэффициента сопротивления был выполнен эксперимент по записи свободных угловых колебаний указанного буя в опытовом бассейне на тихой воде. Запись угловых колебаний производилась с помощью индикаторной гировертикали ДК-14. Частота собственных колебаний составила 3.59 с -1 . Значение Хп было рассчитано по формуле (10) и оказалось равным 0.356 кг∙м2, что составило 55% от значения момента инерции в воздухе. Значение Х ^ определялось по методике, изложенной в [1], и составило 5.23 кг.
Для определения коэффициента сопротивления W В при квадратичном законе демпфирования для бортовых колебаний была использована методика, приведенная в [2]. Значение коэффициента сопротивления рассчитывалось из выражения:
можно рассчитать значения присоединенного момента инерции. В том случае если масса буя неравномерно распределена по его поверхности, то для определения J y можно воспользоваться записями его собственных колебаний в воздухе. При этом расчет момента инерции буя в воздухе следует производить на основе выражения:
Wb=0.85®c rKw, где KW — квадратичный коэффициент сопротивления, юС — частота собственных колебаний, r — амплитуда качки.
Выражение для KW имеет вид:
K w =C w ( J y +Х- ц ) .
Jy
Здесь Jy — момент инерции буя в воздухе, Х п — присоединенный момент инерции, С W — квадратичный коэффициент сопротивления (1/град.).
Здесь М — масса буя (кг), Т — период собственных колебаний буя в воздухе (с), а — расстояние точки подвеса буя от центра масс (плечо подвеса) (м).
Значение а можно определить из выражения
При этом
г _ 3A A n
CW = 2 , ncc
A A n = A n cp - A n + 1ср --
уменьшение средней амплитуды за два периода ( n
и n+ 1), An cc
57.3У SmSe a =--^—о—, м £ seг
А + А .
n cp n + 1ср
— средняя для двух
периодов амплитуда.
Зависимость коэффициента сопротивления от угловой скорости колебаний представлена на рис. 7.
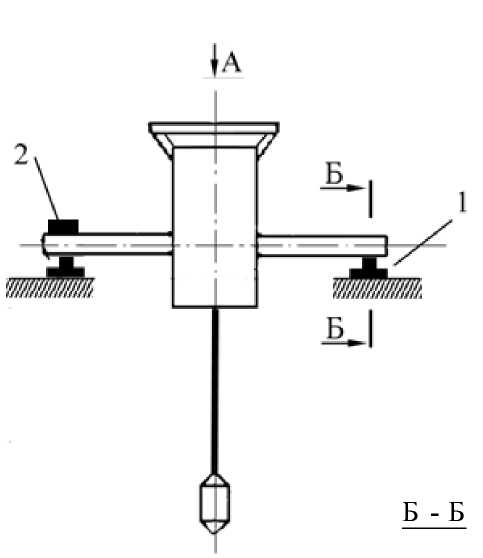
Рис. 6. Схема эксперимента по определению значений δm, δθ и T
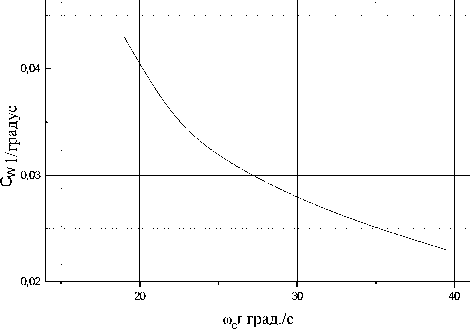
Рис. 7. Зависимость коэффициента сопротивления от скорости угловых колебаний буя диаметром 0.34 м и массой 27 кг
Аналогичным образом были получены коэффициенты сопротивления для вертикальных колебаний указанного буя, которые представлены на рис. 8, и коэффициент присоединенной массы λ ζ = 13.8 кг.
На основе предложенной математической модели были произведены расчеты качки буя с указанными ранее характеристиками. Для выполнения расчетов разработана программа, позволяющая решать систему дифференциальных уравнений методом Рунге—Кутта.
Результаты расчета АЧХ качки представлены на рис. 9 и 10.
С целью сравнения результатов расчета с экспериментальными данными в опытовом бассейне ЦНИИ им. акад. А.Н. Крылова был произведен эксперимент по определению АЧХ вертикальной и угловой качек буев. С помощью волнопродуктора задавалась волна с необходимой высотой и периодом, характеристики которой контролировались по струнному волнографу, закрепленному на
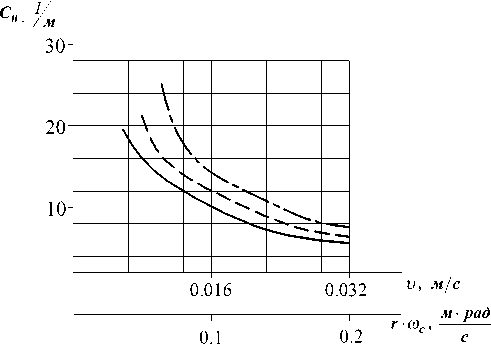
Рис. 8. Экспериментальная зависимость квадратичного коэффициента сопротивления от скорости колебаний буя ∅ 0.34 м при массе буя 27 кг ( ), 29 кг ( ), 36 кг ( )
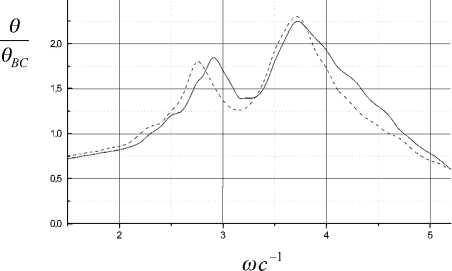
Рис. 10. Сравнение экспериментально полученной АЧХ бортовых колебаний буя 0.34 м и массой 27 кг ( ) с характеристикой, рассчитанной на основе численного решениия уравнений ( ). Характеристики даны при крутизне волны 1/40
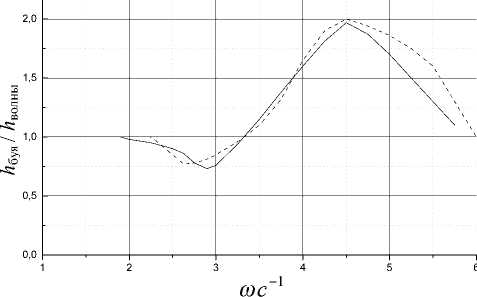
Рис. 9. Сравнение расчетной АЧХ вертикальной качки буя ∅ 0.34 м массой 27 кг ( ) с экспериментальной характеристикой ( ). Характеристики даны при крутизне волны 1/40
рассчитанными кривыми (рис. 9, 10), что позволяет говорить о хорошем качестве разработанной математической модели. На рис. 10 θ ВС обозначает угол волнового склона. Заметим, что диапазон измеренных характеристик ограничивался возможностями опытового бассейна. Следует отметить и то, что расчет угловых колебаний производился для цилиндрического буя со значительной осадкой, который недостаточно хорошо отслеживает углы волнового склона и предназначен для измерения только ординат профиля волн.
Список литературы Моделирование качки волномерного буя
- Грязин Д.Г. Определение значений присоединенных масс воды при вертикальных колебаниях волномерных буев//Научное приборостроение. 2000. Т. 10, № 2. С. 72-75.
- Благовещенский С.Н., Холодилин А.Н. Справочник по статике и динамике корабля. Л.: Судостроение, 1975. Т. 2. 174 с.
