Моделирование колебаний осциллятора с сухим трением

Автор: Нихамкин Михаил Шмерович, Воронов Леонид Васильевич, Саженков Николай Алексеевич, Балакирев Александр Андреевич, Семенова Ирина Валерьевна
Статья в выпуске: 2, 2012 года.
Бесплатный доступ
На примере задачи о свободных затухающих колебаниях пружинного маятника, горизонтально скользящего с трением по плоскости, проведен сравнительный анализ эффективности методов конечно-элементного моделирования колебаний в демпферах сухого трения. Рассмотрены явная и неявная схемы интегрирования по времени. Проведено сравнение полученных в результате конечно-элементного моделирования кинематических и энергетических параметров системы с экспериментальными данными и результатами расчетов по модели с одной степенью свободы. Показаны преимущества явной схемы интегрирования при конечно-элементном моделировании колебаний систем с сухим трением.
Колебания, фрикционное демпфирование колебаний, численное моделирование, демпферы сухого трения
Короткий адрес: https://sciup.org/146211417
IDR: 146211417 | УДК: 629.7.036:539.4
Swinging of dry-friction oscillator computational modeling
The comparison study of the finite element analysis methods efficiency is made on the free damped oscillations problem example. Main attention of article is paid to the differences of explicit and implicit integration schemes. Kinematical and energetic parameters received during finite element analysis are compared with experimental and analytical data. The explicit integration method advantages are shown for the dry friction oscillator swinging problem solving.
Текст научной статьи Моделирование колебаний осциллятора с сухим трением
Причиной значительной части отказов современных энергетических установок является повышенный уровень вибраций, приводящий к усталостным поломкам ответственных деталей, ослаблению затяжки резьбовых соединений, нарушению герметичности трубопроводов. В ряде случаев из-за плотности спектров собственных частот и частот внешних сил не удается избежать работы отдельных деталей и узлов на резонансных режимах. Снизить уровень вибраций деталей можно, увеличив демпфирование колебаний, в частности применив фрикционные демпферы. Их идея состоит в использовании для демпфирования колебаний пары сухого трения, в которой происходит преобразование механической энергии колебаний в тепло.
Проектирование демпферов сухого трения предполагает тщательный выбор геометрических и массовых параметров демпфера, обеспечивающих эффективное снижение вибраций. Решение этой задачи должно опираться на детальный анализ, сложность которого определяется нелинейностью процессов трения и контактного взаимодействия в парах сухого трения.
Колебания тел при наличии сухого трения описываются как в рамках механики твердого тела, так и с учетом деформирования контактирующих тел [1]. Учет деформаций важен в связи с тем, что они определяют площадку контакта и действующие на ней усилия, которые обусловливают процессы трения. Решение практических задач проектирования демпферов сухого трения предполагает численное моделирование колебаний контактирующих тел именно в рамках механики деформируемого тела, в частности, с применением метода конечных элементов (МКЭ). Несмотря на многообразие подходов к применению МКЭ для решения таких задач (см., например [2–6]), единых рекомендаций по методике конечно-элементного моделирования колебаний систем с сухим трением нет.
Целью настоящего исследования является отработка методики конечно-элементного моделирования колебаний в демпферах сухого трения на примере пружинного маятника, скользящего с трением по горизонтальной плоскости. В частности, представляет интерес сравнительный анализ эффективности явной и неявной схем интегрирования по времени.
Рассматриваемый пружинный маятник (рис. 1) представляет собой груз массой m , лежащий на горизонтальной плите и закрепленный на листовой пружине с жесткостью k . При колебаниях груза обеспечивается постоянный контакт между грузом и плитой. Возбуждение колебаний производится начальным отклонением маятника по оси x от точки равновесия на расстояние x 0 .
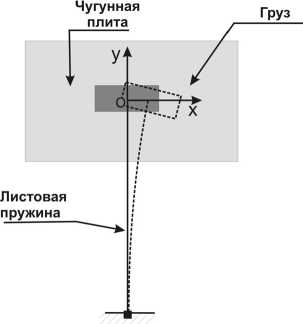
Рис. 1. Пружинный маятник
В рамках механики твердого тела, считая систему одномассовой и перемещение – происходящим по оси x , свободные колебания груза можно описать обыкновенным дифференциальным уравнением [7]
mx + kx + F f = 0 (1)
с начальными условиями
x (0) = x 0, x (0) = 0, (2)
где Ff (x&)– сила трения;
Для описания сухого трения будем использовать наиболее распространенную модель Кулона [1], в соответствии с которой сила трения направлена противоположно вектору скорости и пропорциональна с коэффициентом трения f силе нормального давления N . Коэффициент трения примем с учетом влияния относительной скорости трущихся поверхностей x & в виде суммы статической f s и динамической f d составляющих с экспоненциальным переходным участком (рис. 2) [8]:
f ( x ) = fd +( Л - f d ) exP ( - d c -|x ) , (3)
где d c – константа модели.
Математическое представление закона Кулона в этом случае имеет вид
F f ( x ) = - f ( :x ) • N ■ sign( ;x ) при |;&| > 0, |F f (, x )| < F f (0) при . x = 0.
Решение задачи (1), (2) представляет собой затухающие колебания. При f s = fd их огибающая, как известно [7], является прямой (рис. 3), а колебания завершаются остановкой груза в точке x ост ≠ 0 . В отличие от классического случая вязкого трения логарифмический декремент колебаний δ, определяемый как отношение двух соседних амплитуд, и относительное демпфирование ζ,
A i
8 , ^ ~ ~ ’ (5)
Ai+1 2n становятся величинами непостоянными, увеличивающимися по мере затухания колебаний.
При численном моделировании процессов в демпферах сухого трения существенными являются следующие факторы:
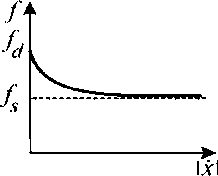
Рис. 2. Зависимость коэффициента трения от относительной скорости трущихся поверхностей
-
— сложная геометрия контактирующих тел, составляющих пару сухого трения;
-
- деформация контактирующих тел, трехмерное напряженно-деформированное состояние в зоне контакта;
-
- неизвестная, изменяющаяся во времени в процессе колебаний
площадка контакта;
-
- силы трения и нормального давления в зоне контакта, изменяющиеся во времени;
-
— динамический характер взаимодействия контактирующих тел в процессе колебаний.
Для того чтобы учесть перечисленные факторы, необходимо рассматривать нестационарную динамическую задачу механики деформируемого
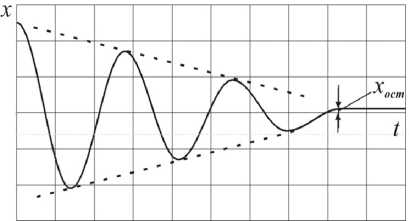
Рис. 3. Свободные затухающие колебания маятника при сухом трении (одномассовая модель)
твердого тела в 3-D упругой постановке; при этом необходимо учесть в качестве граничных условий нелинейные условия контакта между демпфером и ответными деталями.
Эффективным методом численного моделирования подобных процессов является метод конечных элементов [2-6]. В рамках конеч- но-элементного моделирования эта задача описывается матричным уравнением [9]
Mx ( t ) + Dx ( t ) + Kx ( t ) = F ( t ) + ^ F f ( t ),
где М , D и K - матрицы масс, демпфирования и жесткости соответственно; x - вектор неизвестных узловых перемещений; F ( t ) - вектор внешних сил; S F f (t ) - суммарный вектор сил трения на всех контактных поверхностях.
Трение в контакте рассматривается в рамках упомянутого выше варианта модели Кулона (3), (4).
При моделировании динамического контактного взаимодействия в методе конечных элементов в настоящее время наиболее широко применяется метод «пенальти» [10, 11]. Идея метода состоит в том, что в расчет условно вводится упругий элемент, расположенный между контактирующими поверхностями и определяющий жесткость взаимодействия или величину контактных сил. Контактная площадка определяется с помощью скалярной функции G ( x , y , z ), описывающей поверхность одного из контактирующих тел. При G ( x , y , z ) > 0 точки контактирующего тела, лежат вне поверхности, при G ( x , y , z ) = 0 - на поверхности, G ( x , y , z ) < 0 означает взаимное проникновение контактирующих тел. В последнем случае для предотвращения проникновения в соответствующий узел прикладывается противодействующая сила. Согласно методу пенальти противодействующая сила пропорциональна величине проникновения сегментов тел друг в друга. Коэффициент пропорциональности имеет смысл эффективной жесткости и называется «коэффициентом пенальти». Эффективность функционирования алгоритма «пенальти» зависит от выбора его значения. Высокая нормальная и касательная жесткость необходимы для исключения эффектов проникновения одной контактной поверхности в другую. В то же время их необоснованно завышенные значения способны привести к плохой обусловленности глобальной матрицы жесткости.
Для анализа динамических процессов в методе конечных элементов могут быть использованы алгоритмы явного или неявного интегрирования по времени. В настоящей работе колебания осциллятора с сухим трением исследуются с использованием обоих этих алгоритмов с целью сравнительного анализа их эффективности применительно к задачам фрикционного демпфирования.
Численное моделирование проводилось для следующих параметров: масса груза m =1 кг, жесткость пружины к = 550 Н/м, коэффициенты в модели Кулона f s = 0,46, f d =0,45, d c =100, начальное отклонение x 0 = 0,095 м.
Конечно-элементная модель системы (рис. 4) включала в себя модели груза и плиты, состоящие из призматических элементов второго порядка; пружина моделировалась двухузловым элементом.
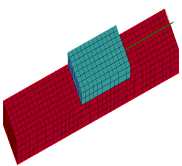
Контактное давление груза Рис. 4. Конечно-элементная модель на плиту моделировалось распре- осциллятора деленной нагрузкой p = 5450 Па.
Результаты численного моделирования в виде зависимости x ( t ) приведены на рис. 5. Полученные зависимости представляют собой затухающую синусоиду с огибающей, близкой к прямой. Явный и неявный метод интегрирования дали зависимости x ( t ), практически не различающиеся между собой.
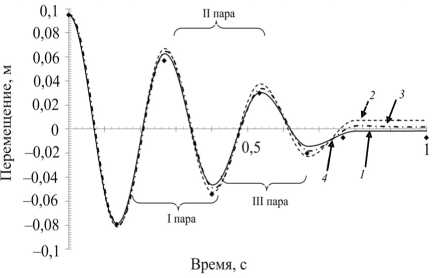
Рис. 5. Зависимости перемещений от времени: 1 - расчет по модели (1), (2); 2 - МКЭ, неявная схема интегрирования по времени; 3 - МКЭ, явная схема интегрирования по времени; 4 - эксперимент
Для верификации результатов численного моделирования использованы результаты расчета по модели с одной степенью свободы (1), (2). На рис. 5 видно, что они согласуются с результатами численного моделирования.
Для дополнительной проверки результатов численного моделирования проведен специальный эксперимент, в котором реалиизован процесс затухающих колебаний рассмотренного выше объекта (см. рис. 1). Упругая листовая пружина закреплялась одним концом в зажимное устройство, а на свободном ее конце крепился стальной прямоугольный параллелепипед, лежащий одной из граней на шлифованной плоской чугунной плите.
Система выводилась из положения равновесия начальным отклонением на заданную величину x 0 . Возникающие после этого колебания регистрировались видеокамерой. Жесткость пружины, масса груза, начальное отклонение соответствовали использованным в расчетах значениям.
Численные значения полученных величин собственных частот колебаний и коэффициентов относительного демпфирования, осред-ненных по I, II и III парам соседних пиков (см. рис. 5), полученные численным моделированием по явной и неявной схемам, аналитически из решения (1), (2) и экспериментально представлены в таблице. Полученные расчетные и экспериментальные данные согласуются между собой.
Расхождение по собственным частотам между аналитическим решением и экспериментом составляет 8,4 %, что свидетельствует о согласовании упругомассовых параметров модели с одной степенью свободы.
Расхождение по относительному демпфированию 11,6 % свидетельствует об удовлетворительном соответствии эксперименту принятой в расчете модели трения и ее параметров.
Сопоставление расчетных и экспериментальных данных по собственным частотам ω и относительному демпфированию ζ
|
Параметр |
Эксперимент |
Аналитическое решение / расхождение с экспериментом, % |
МКЭ, неявный метод / расхождение с экспериментом, % / расхождение с аналитическим решением, % |
МКЭ, явный метод / расхождение с экспериментом, % / расхождение с аналитическим решением, % |
|
ω, Гц |
3,74 |
3,45 / 8,4 |
3,71/0,8 /8,5 |
3,65 /2,5 / 5,8 |
|
ζ, % |
10,06 |
11,23 / 11,6 |
8,75 / 13,0 / 28,7 |
9,98 / 0,8 / 12,5 |
Численное моделирование дает хорошее совпадение с экспериментом по собственным частотам (расхождение в пределах 2,5 %). Менее точные результаты получаются при определении относительного демпфирования (расхождение до 28,7 %). Несколько меньшую погрешность определения относительного демпфирования (12,5 %) обеспечивает явная схема интегрирования по времени.
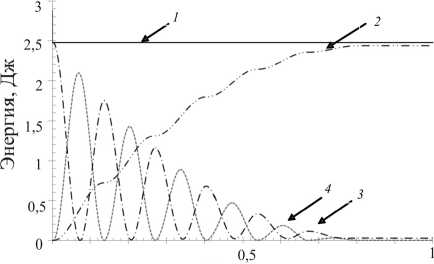
Для дополнительной оценки результатов, получаемых конечноэлементным моделированием с явной схемой интегрирования по времени, проведен анализ энергетических параметров системы. На рис. 6. приведены зависимости от времени кинетической, потенциальной и полной энергии системы и работы сил трения.
В начальный момент времени, энергия системы равна потенциальной энергии изогнутой листовой пружины и составляет 2,48 Дж. После начала движения в процессе колебаний кинетическая и потенциальная составляющие энергии системы изменяются в противофазе с частотой, равной удвоенной частоте колебаний груза. Их амплитуда постепенно убывает, при этом монотонно возрастает работа сил трения.
Время, с
Рис. 6. Зависимости энергии от времени: 1 – полная энергия; 2 – работа сил трения; 3 – кинетическая энергия; 4 – потенциальная энергия
Поскольку конечно-элементная модель не включает в себя механизмы превращения работы сил трения в тепло и рассеяния тепла, работа сил трения переходит во внутреннюю энергию системы, при этом ее полная энергия остается неизменной. Эти процессы превращения энергии качественно и количественно согласуются с теоретическими представлениями, что дополнительно подтверждает достоверность конечно-элементного моделирования.
Таким образом, моделирование колебательных процессов в системе с сухим трением может эффективно проводиться методом конечных элементов, как с явной, так и неявной схемами интегрирования по времени. Контактное взаимодействие тел, составляющих пару сухого трения, может моделироваться с помощью алгоритма «пенальти», сухое трение – законом Кулона. Несколько более точные результаты определения параметров демпфирования дает явная схема интегрирования по времени.
Полученные результаты предполагается использовать при расчетах демпфирования рабочих лопаток высокоресурсных, высоконагру-женных турбин и блисков компрессоров газотурбинных двигателей.
