Моделирование колебаний звена технологической машины в режиме динамического торможения асинхронного двигателя при частотном управлении

Автор: Карнаухов Николай Федорович, Пудова Юлия Владимировна, Филимонов Максим Николаевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 4 (47) т.10, 2010 года.
Бесплатный доступ
Моделирование колебаний звена технологической машины (ТМ) с асинхронным электроприводом частотного управления позволяет выявить причины возникновения возмущающих воздействий, определить способы гашения колебаний. Предлагается «ступенчатое» программное регулирование тока подмагничивания статора асинхронного двигателя (АД) при формировании тормозного момента на валу с учетом амплитуды и фазы колебаний, параметры которых определяются виртуальным фазочастотометром.
Звено подвижности тм, амплитуда и фаза колебаний, двухтоковое торможение ад, виртуальный измеритель колебаний
Короткий адрес: https://sciup.org/14249396
IDR: 14249396 | УДК: 621.865.8-83
Vibration simulation of technological machine body in the dynamic braking mode of asynchronous machine with frequency control
Simulation of the vibration level of technological machines (TM) with an asynchronous electric frequency control allows to detect causes of interference effects, to identify oscillation suppression technics. A steplike program control stator current bias in the formation of AS torque on the shaft taking into account the amplitude and phase of the oscillation parameters is determined by the virtual phase-frequency meter.
Текст научной статьи Моделирование колебаний звена технологической машины в режиме динамического торможения асинхронного двигателя при частотном управлении
Введение. В режиме разгона, торможения частотного асинхронного электропривода (ЭП) исполнительного механизма (ИМ) технологической машины (ТМ) в подвижных звеньях могут возникать вынужденные колебательные процессы, отрицательно влияющие на точностные показатели технологического оборудования (ТО), долговечность и эксплуатационные возможности средств автоматизации [1, 2]. Проанализированы причины возникновения колебательных процессов и определены их виды в ТМ [3, 4]. В зависимости от характера изучаемого явления и цели исследования колебаний в ТМ число степеней свободы движения звена ИМ определяют по расчетной схеме, приближенно отражающей конструктивные особенности исследуемого узла [4, 5]. Поставлена задача гашения колебаний звена подвижности ИМ с одной степенью свободы, в частности, захватного устройства (ЗУ) промышленного робота (ПР) с частотно-управляемым электроприводом (ЧУЭП) на базе короткозамкнутого АД.
Постановка задачи . При проектировании новых высокопроизводительных ТМ на базе ЧУЭП, функционирующего по схеме автономный инвертор напряжения (АИН) – асинхронный двигатель (АД), появляется необходимость в предварительной оценке параметров колебательности упругой системы: безударные движения ИМ в начальный период разгона и более сложные процессы торможения, обеспечивающие остановку ИМ в заданном положении с учетом прогнозируемой точности. Колебательность движения ИМ (звена подвижности ТМ) зависит от ряда факторов: массы звена подвижности, скорости перемещения и интенсивности торможения системы [1, 3]. Для оценки параметров колебаний отдельных звеньев ТМ обычно используют специальную измерительную аппаратуру, которую можно заменить виртуальными моделями инструментального оснащения и расширенных возможностей, выполненных в программном пакете Matlab+Simulink [6].
Математическая модель. Для поиска метода гашения колебаний выходного звена подвижности – захватного устройства (ЗУ) с консольным креплением в направляющей цилиндрической системы координат ПР «Электроника НЦТМ-01» была составлена упрощенная расчетная схема (рис.1).
Рис.1. Упрощенная расчетная схема взаимодействующих усилий в направляющих звена подвижности ПР
При анализе расчетной схемы принято равномерное распределение массы руки ПР, а массы ЗУ и транспортируемого груза сосредоточены в одной точке. Рассмотрены основные силовые соотношения в схеме (рис.1) с определением реакций в опорах при нулевых значениях А и В изгибающих моментов относительно точек А и В с учетом параметров [1]: а – вылет консоли направляющей (ход объекта манипулирования), ℓ – расстояние между опорами; d – диаметр направляющей; f – коэффициент трения между направляющей и втулкой конструкции. ξ – ускоре- ние свободного падения, q – распределенная нагрузка звена подвижности; G – вес груза; Q1, Q2 – силы трения в опорах А и В соответственно, F – движущая сила.
Значения реакций опор А и В определяются соотношениями [3]
Р _ 2G(a - fd) - q(f2 - a^ ) - 2qfd(l + a)
RA =
Rb = G(l + a - fd) + q(l + aM^+a - fd) .(2)
Для поиска деформации руки робота по оси X в точке D (рис.1,б) использовался интеграл Мора [4], что позволило определить перемещение ЗУ под действием приложенных нагрузок x = - Gk1 - qk2, где k1 и k2 – коэффициенты при сосредоточенной и распределенной нагрузках, определяемые выражениями:
ci "3 / ki = — [2( - +1) - f- (- + 3(1 - f))],(4)
6 Ej aa a a '1 d l'2 I I Il k2 = —- [2 f- (— - (3 + 2 -) + 6 fd (- +1)) + (3 + 4----)],(5)
24Ej a a a a aa где E – модуль упругости при прогибе.
Если под сосредоточенной силой G (рис.1) принять алгебраическую сумму силы тяжести и силы инерции, тогда:
G = -mx - mg,(6)
где m – масса перемещаемого груза.
Для перехода к анализу динамики перемещения центра масс ЗУ ось следует направить в сторону действия силы тяжести (по оси Х) и, после некоторых преобразований, можно записать неоднородное дифференциальное уравнение x + k^X = G ,(7)
где ki = 1- и G = g + qk21 ,(8)
у mkii где k11, k21 – коэффициенты различия направленности силы трения при четных и нечетных колебаниях ЗУ.
В результате математического моделирования [7] были получены графические зависимости колебаний ЗУ в точке позиционирования (рис.2) для различных перемещаемых масс (груза) без изменения условий торможения.
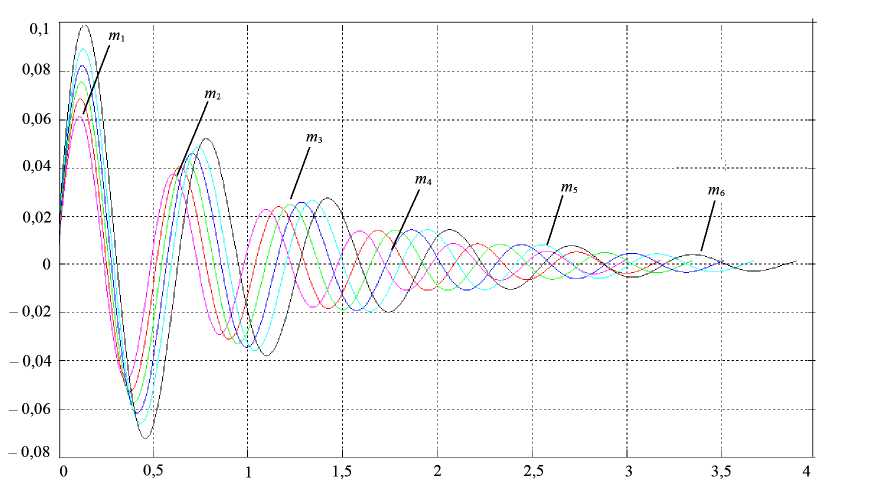
Рис.2. Зависимость колебаний ЗУ манипулятора в точке позиционирования при нагрузке от 1 до 12 кг ( m 1 =1, m 2 =3, m 3 =5, m 4 =7, m 5 =9, m 6 =12 кг)
Для измерения амплитуд и фаз вынужденных колебаний при моделировании колебательных процессов использовался виртуальный инструментарий – фазочастотометр (рис.3), позволяющий методом сравнения [6] определять искомые параметры гармонических колебаний.
Вход
Смещение входа
Выход
Смещение выхода
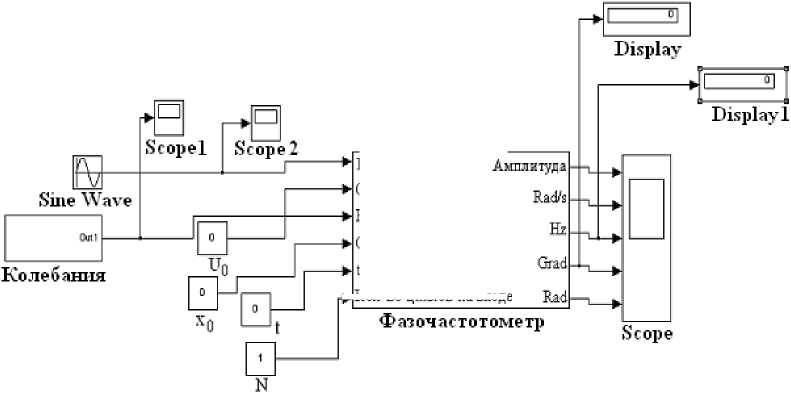
Рис. 3. Схема подключения фазочастотометра
t начала измерения
* Кол -во циклов на входе
Процесс измерения включает этапы:
-
– считывание с входа интервала времени, по истечении которого устанавливаются стационарные колебания;
-
– измерение длительности одного полупериода колебания входного сигнала и смещения выходных колебаний по отношению к входным колебаниям;
-
– вычисление фазы (Ф = 2 π ( l /2 D ) с учетом постоянных смещений входных U 0 и выходных X 0 колебаний, поскольку последние могут происходить относительно ненулевого уровня.
Результаты выполненных измерений параметров колебательного процесса позволяют построить взаимные зависимости (рис.4).
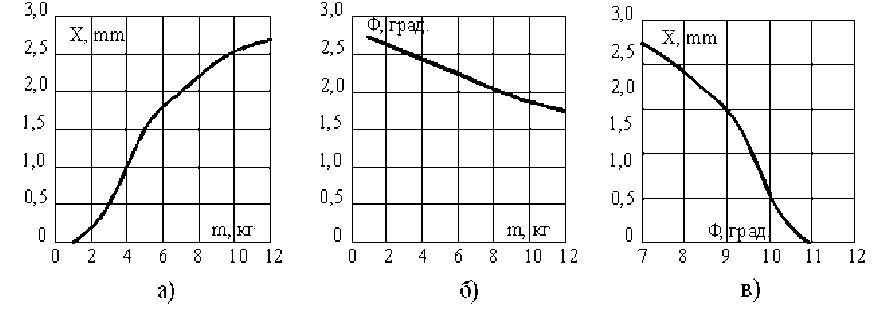
Рис.4. Взаимные зависимости колебаний: а – амплитуды от массы; б – фазы колебаний от массы; в – амплитуды колебаний от фазы
Полученные зависимости расчетной схемы могут быть использованы в качестве входных переменных для реализации алгоритмов нечеткой логики при управлении частотным электроприводом ИМ ТМ, а также исходными величинами для решения сложной задачи по снижению колебаний ЗУ в процессе работы ПР. Применение ЧУЭП характеризуется возможностью программного управления гашением колебаний ЗУ в процессе регулирования постоянного тока фазы АД в режиме двухтокового динамического торможения [1, 2]. При этом формируются расчетные динамические моменты на валу АД и исключаются возможные удары в механической части ЭМС [1, 3]. Такая система управления АД позволяет (по сигналам датчиков контролируемых величин) в соот- ветствии с приведенными зависимостями (рис.4) формировать целесообразное торможение звена подвижности в режиме демпфирования колебаний амплитуды ЗУ на определенном уровне (от 0,2 до 0,7 мм), зависимом от чувствительности датчиков и коэффициента усиления сигналов в СУ. В общем случае, процесс торможения АД можно рассматривать как результат взаимодействия эквивалентного двигательного и тормозного моментов на валу, обеспечиваемых равенством намагничивающих сил постоянного тока подмагничивания статора [1, 7] и приведенного значения переменного тока ротора АД. Использование двухтокового способа формирования тормозного момента для гашения колебаний ЗУ при подаче импульсов тока (рис.5) возможно в режиме импульсного регулирования тока подмагничивания, когда интегральная площадь импульса постоянного тока приравнивается к интегральной площади соответствующего периода колебаний звена подвижности, ЗУ. Начало периода формирования импульсов тока подмагничивания статора должно совпадать по времени с периодом вынужденных колебаний звена подвижности, ЗУ, но действовать в противофазе.
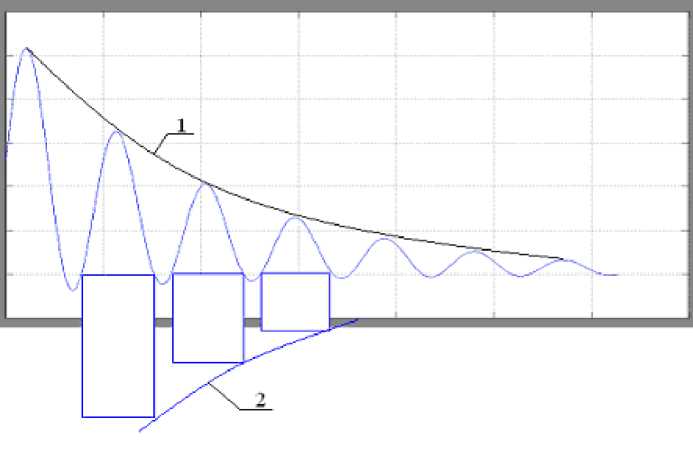
Рис.5. Метод гашения колебаний ЗУ ПР в процессе позиционирования
Такое управление электроприводом возможно при программном управлении и наличии силомоментных датчиков на конструктивных элементах ИМ, датчиков контролируемых параметров информационного канала СУ. При этом решение задачи управления ЭП предполагает разработку соответствующего программного обеспечении (ПО) и предсказуемость изменений контролируемых колебаний ЗУ (кривая 1 , рис.5), а также возможность формирования импульсов тока подмагничивания обмотки статора АД с оценкой интегрального значения площади каждого импульса, ограниченными экспоненциальной кривой 2 затухания колебательного процесса. Для реализации решения необходимо выбрать датчики измеряемых величин по фазочастотным характеристикам и диапазонам контролируемых параметров. При усложнении задачи исследования и необходимости расширения функциональных возможностей датчиков целесообразно применять известные решения виртуальных приборов. Такая необходимость появляется при управлении, например, ЧУЭП ТМ как сложным объектом в условиях неопределенности с использованием алгоритмов нечеткой логики.
Выводы. Моделирование вынужденных колебаний звена подвижности ТМ, обусловленных процессами «разгона-торможения» электропривода, позволяет:
-
– определить характерные зависимости вынужденных колебаний от внезапного изменения скорости движения, тормозного усилия и инерционных составляющих перемещаемых масс ИМ;
-
– разработать направления по совершенствованию конструкции звена подвижности и направляющих ТМ, выбрать рациональное сочетание механических характеристик электропривода и ИМ (ЗУ).
Список литературы Моделирование колебаний звена технологической машины в режиме динамического торможения асинхронного двигателя при частотном управлении
- Карнаухов Н.Ф. Демпфирование колебаний захватного устройства промышленного робота в режиме двухтокового динамического торможения асинхронного двигателя при частотном управлении/Н.Ф. Карнаухов, М.Н. Филимонов, Ю.В. Пудова//Вестник ДГТУ. -2009. -Т. 9. -308 с.
- Карнаухов Н.Ф. Особенности формирования двухтокового динамического торможения асинхронного двигателя мехатроннной системы при частотном управлении/Н.Ф. Карнаухов, М.Н. Филимонов, Н.В. Деркачев//Мехатроника-2008: материалы IV междунар. науч.-практ. студ. коллоквиума (Новочеркасск, 18-20 июня 2008)/Южно-Рос. гос. техн. ун-т. -Новочеркасск, 2008. -С. 17-20.
- Робототехнические системы в сборочном производстве/под ред. Е.В. Пашкова. -Киев: Выща шк., 1987. -272 с.
- Левитский Н.И. Теория механизмов и машин/Н.И. Левитинский. -М.: Наука. Глав. ред. физ.-мат. литературы, 1979.
- Карнаухов Н.Ф. Энергетические показатели электропривода при частотном способе управления асинхронным двигателем/Н.Ф. Карнаухов, В.А. Прус, М.Н. Филимонов//Динамика технологических систем: тр. VIII междунар. науч.-техн. конф./Донск. гос. техн. ун-т. -Ростов н/Д, 2007. -Т. III. -219 с.
- Данилов А.И. Построение на элементах Simulink измерителей фазы, частоты и амплитуды/А.И. Данилов//Проектирование инженерных и научных приложений в среде MATLAB: тр. II науч. конф. -2004.
- Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты/Р.Т. Шрейнер. -Екатеринбург: УРО РАН, 2000. -654 с.
- Karnauhov N.F. Dempfirovanie kolebanii zahvatnogo ustroistva promyshlennogo robota v rejime dvuhtokovogo dinamicheskogo tormojeniya asinhronnogo dvigatelya pri chastotnom upravlenii/N.F. Karnauhov, M.N. Filimonov, Yu.V. Pudova//Vestnik DGTU. -2009. -T. 9. -308 s. -in Russian.
- Karnauhov N.F. Osobennosti formirovaniya dvuhtokovogo dinamicheskogo tormojeniya asinhronnogo dvigatelya mehatronnnoi sistemy pri chastotnom upravlenii/N.F. Karnauhov, M.N. Filimonov, N.V. Derkachev//Mehatronika-2008: materialy IV mejdunar. nauch.-prakt. stud. kollokviuma (Novocherkassk, 18-20 iyunya 2008)/Yujno-Ros. gos. tehn. un-t. -Novocherkassk, 2008. -S. 17-20. -in Russian.
- Robototehnicheskie sistemy v sborochnom proizvodstve/pod red. E.V. Pashkova. -Kiev: Vyscha shk., 1987. -272 s. -in Russian.
- Levitskii N.I. Teoriya mehanizmov i mashin/N.I. Levitinskii. -M.: Nauka. Glav. red. fiz.-mat. literatury, 1979. -in Russian.
- Karnauhov N.F. Energeticheskie pokazateli elektroprivoda pri chastotnom sposobe upravleniya asinhronnym dvigatelem/N.F. Karnauhov, V.A. Prus, M.N. Filimonov//Dinamika tehnologicheskih sistem: tr. VIII mejdunar. nauch.-tehn. konf./Donsk. gos. tehn. un-t. -Rostov n/D, 2007. -T. III. -219 s. -in Russian.
- Danilov A.I. Postroenie na elementah Simulink izmeritelei fazy, chastoty i amplitudy/A.I. Danilov//Proektirovanie injenernyh i nauchnyh prilojenii v srede MATLAB: tr. II nauch. konf. -2004. -in Russian.
- Shreiner R.T. Matematicheskoe modelirovanie elektroprivodov peremennogo toka s po-luprovodnikovymi preobrazovatelyami chastoty/R.T. Shreiner. -Ekaterinburg: URO RAN, 2000. -654 s. -in Russian.
