Моделирование колебательной системы сошник - почва

Автор: Шевченко Анатолий Павлович, Бегунов Максим Алексеевич
Журнал: Вестник Омского государственного аграрного университета @vestnik-omgau
Рубрика: Техника и технологии обработки почвы
Статья в выпуске: 2 (22), 2016 года.
Бесплатный доступ
Приведены результаты теоретических исследований влияния колебаний на качество посева семян льна. Устойчивое функционирование разработанной исполнительной подсистемы определяется с помощью метода структурных исследований динамического состояния их взаимодействия. Метод основан на известном положении, что нестационарные колебания параметрических возбуждаемых систем представляют нетривиальные решения вариационной системы с центром, соответствующим особым решениям систем, и предполагает отыскание зон частотных соотношений возмущающих (подаваемых извне) и собственных частот колебаний (истечение, крошение и др. процессы), обеспечивающих их устойчивое функционирование. Для повышения устойчивости глубины хода рабочих органов (на основе представленной методологии анализа и синтеза исполнительных подсистем сельскохозяйственных машин с частотным управлением их рабочими процессами) определены общие динамические закономерности совместной работы подсистем, обеспечивающие ограниченный устойчивый темп подачи энергии. Проведенные исследования позволяют сделать вывод: при существующей конструкции сошниковой группы частота свободных колебаний k равна 3 с-1, а в диапазоне ω λ - 1-4 Гц возникают резонансные явления в подсистемах глубины хода сошников. Существенно нарушается равномерность их хода, что подтверждается равномерностью распределения семян по глубине К с. Поэтому снижать собственную частоту колебаний k или ω 0 сошников нереально и неэкономично (слишком большая масса сошника увеличит расход топлива), наиболее эффективно повышать собственную частоту колебательной системы путем увеличения жесткости пружины, а также снижать частоту ω λ внешних нагрузок, в частности использовать динамические частотные ограничители. Поэтому снижение воздействия внешних нагрузок можно достичь путем соединения двух сошников на одной кулисе, тем самым увеличив массу колебательной системы (сошника). Повышение жесткости пружины привело к росту частоты свободных колебаний k и увеличению равномерности распределения семян по глубине К с. Но возникает проблема удержания сошников на заданной глубине, для этого предлагается применять лыжеобразные ограничители хода сошника.
Сеялка, семена, равномерность, глубина хода, сошники, колебательная система
Короткий адрес: https://sciup.org/142199184
IDR: 142199184 | УДК: 631.331
Modeling of oscillatory system coulter - soil
This article presents the results of theoretical studies of the effect of fluctuations on the quality of planting flax seeds. Sustainable operation of a designed executive subsystem is determined by the method of structural studies of the dynamic state of their interaction. The method is based on the known position that the nonstation- ary oscillations of parametric systems are non-trivial solutions of the variational system with the center corre- sponding to particular solutions of systems. This method involves the determination of the areas of external relations of the frequency and natural vibration frequencies to ensure their sustainable operation. To improve the stability of the stroke depth of working bodies, on the basis of the methodology of the analysis and synthesis of the executive subsystems of agricultural machines with frequency control of their workflow, identified common patterns of dynamic teamwork of subsystems that provide a limited steady pace energy supply. The conducted research lead to the conclusion that under the existing structure of a coulter group the frequency of free oscillations k is equal to 3 с-1. And in the range of ω λ - 1-4 Hz resonance phenomena occur in the subsystems of stroke depth. This greatly disturbed the uniformity of their stroke, which is evident from the uniform distribution of seeds on depth К с. As can be seen, it is unrealistic to reduce the natural oscillation frequency k or ω 0 of coulter and uneconomical as well (fuel consumption will increase because of too much coulter weight). The most effective way is to increase the natural frequency of the vibrational system by increasing the stiffness of the spring and to reduce the incidence ω λ of external loads, in particular to use dynamic frequency limiters. Therefore, reducing the impact of external loads can be achieved by connecting two coulters on the same link, thereby in- creasing the weight of the oscillating system (the opener). Increasing the stiffness of the spring has led to an in- crease in the frequency of free oscillations k, and to increase of the uniformity of the distribution on the seed depth К с. But this raises the problem of coulters retention at a given depth, it is proposed to apply skilike coulter stroke limiters.
Текст научной статьи Моделирование колебательной системы сошник - почва
Машинное выполнение технологических операций характеризуется показателями, определяющими условия нормального функционирования систем и подсистем, выполняющих в машине основные и вспомогательные процессы. Эти показатели обоснованы закономерностями, взаимосвязями и взаимозависимостями между совокупностью физических взаимодействий (механических, гидравлических, биологических, электромагнитных и др.) и реакциями на эти взаимодействия со стороны исполнительных подсистем [1].
В сельскохозяйственных машинах выполняемый технологический процесс, как правило, устанавливают вначале подбором режимов и параметров исполнительных систем и последующей соответствующей их настройкой в полевых условиях. При проходе агрегатов в поле со стороны неровностей поля возникают дополнительные воздействия, чаще всего реализуемые в виде колебаний и вибраций в механизмах (подсистемах) машин и агрегатов, нарушающие установочные режимы и параметры.
Однако главной отличительной особенностью вибрации как физического эффекта одного из видов механических воздействий является возможность передачи энергии системе большой удельной мощности при малой амплитуде ее смещения за период колебаний. Вместе с тем, возможность регулирования параметров вибрации (частот и амплитуд) в широких пределах позволяет распространить ее действие на широкий спектр физических процессов. Универсальность вибрации состоит в том, что это наиболее эффективное общее средство управления динамическим состоянием систем при осуществлении различных технологических операций. Роль вибрации не только в том, что она приводит к интенсивному движению частиц или звеньев друг относительно друга в объеме системы, но и в том, что при этом резко увеличиваются скорости движения каждой частицы или звена в отдельности относительно центра масс.
Широкие возможности управления процессами в частотной области делают эту отрасль все привлекательнее в смежных отраслях науки, в частности, в сельхозмашиностроении. В отличие от общепринятого мнения о вредности вибрации, появляется возможность управления динамическими состояниями систем, выполняющих технологические процессы, используя их внутренние характеристики, что освобождает их от необходимости применения дополнительных контролирующих или управляющих систем, искусственно привносимых в конструкцию машины.
В основе выбора высокоточных технологий культур в условиях рискованного земледелия лежит необходимость передачи энергии частицам семян и почвы возможно большей удельной мощности при малых воздействиях на них, что возможно при использовании процессов вибрации. Эффект вибрации состоит в том, что возможно резкое увеличение скорости движения частиц относительно центра масс в объеме систем. Внесение в систему направленного вектора этих скоростей позволяет упорядочить процессы движения частиц (семян, почвенных агрегатов) в нужном направлении с большой энергией. Для совершения при этом работы необходимо перевести процесс вибрации в нужный колебательный режим, установив необходимый вид управляющих процессов на исполнительные подсистемы, обеспечив заданные технические требования к выполняемым технологическим процессам.
Объекты и методы
Анализ и синтез исполнительных подсистем сельскохозяйственных машин с частотным управлением их рабочими процессами позволяет определить целенаправленность структуры, допустимые частотные интервалы и вид необходимых управляющих воздействий на них [1].
В работах Н.М. Беспамятновой рассмотрены процессы преобразования энергии агрегатов в энергию для преобразования почвы в заданное состояние [2]. Так, на произведение работы по преобразованию, например, почвы из исходного состояния в заданное согласно законам термодинамики необходимо определенное количество энергии ε 1 , причем с определенной скоростью ее поступления. Почва способна поглощать полученную энергию со скоростью х , которая зависит от ее реологических свойств. Поэтому реальный темп подачи энергии к почве Δ зависит от перечисленных характеристик.
Соотношения между перечисленными характеристиками в функциях оператора преобразования Лапласа ( S ) следующие:
'А ( S ) = д ( S ) - х ( S ) е ( S ) = h ( S ) - h i ( S )
< h ( S ) = W 2 (S ) А ( S ) _ M ( S ) = W 1 ( S ) £ ( S )
где h – заданный уровень глубины хода рабочего органа, м; h 1 – реальный уровень глубины обработки почвы, м; ε – дефицит энергии для преобразования пласта в заданное состояние, Дж; μ – необходимый темп поступления энергии (поле скоростей); W 1 – передаточная функция процесса преобразования почвы; х – темп поглощения энергии почвой; Δ – темп подачи энергии к почве.
Условия А ( S ) = д ( S ) - х ( S ) , или А ( S ) = W 1 ( S) e (S ) - х ( S ) - есть условия оптимального соотношения количества энергии, поступающей в почву от рабочего органа и поглощаемого (потребляемого) почвой для ее преобразования в заданное состояние. Оптимальное количество энергии (дефицит) записано во втором уравнении.
Возможны три возможных варианта относительно μ:
Һ 1 ( S ) = h -1 I х , где Т = — - постоянная времени, b < 1;
I b) b
– в случае дефицита поступления энергии для преобразования пласта получается устойчивый апериодический процесс, который отличается от заданного уровня на величину Г 1 1 х , т.е.
I ь )
реализуется неустраняемый брак;
-
- если добавить темп поступления энергии выше его дефицита, то Һ 1 ( S ) = lim Һ 1 ( S ) = h , в
х ^ 0
этом случае в системе будут иметь место незатухающие колебания на границе устойчивости. Такой режим характерен для консервативного звена;
– в оптимальном случае темп приращения энергии в почве пропорционален его дефициту;
4 ® ^
2 ® 2
2 2 \
®х ®ц k ®0
при — > а появляется апериодический процесс, при 111 /а возникает колебательный зату-( b ) " I b) х и хающий процесс.
Используя представленную теорию процесса формирования глубины обработки почвы на заданном уровне, можно в реальных условиях оценивать полученные результаты при разработке новых механизмов. Для этого достаточно выявить вид передаточной функции спроектированного рабочего органа и сопоставить его с перечисленными вариантами.
Устойчивое функционирование разработанной исполнительной подсистемы определяется с помощью метода структурных исследований динамического состояния их взаимодействия. Метод основан на известном положении, что нестационарные колебания параметрически возбуждаемых систем представляют нетривиальные решения вариационной системы с центром, соответствующим особым решениям систем, и предполагает отыскание зон частотных соотношений возмущающих (подаваемых извне) и собственных частот колебаний (истечение, крошение и др. процессы), обеспечивающих их устойчивое функционирование. Стационарными колебаниями следует считать случай (центр системы) при отсутствии перемещений, а при Z 1 = Z 0 + ∆ – система перемещается и может выйти за допустимый предел.
В зависимости от вида показателя динамической устойчивости m у нестационарных колебаний при Z ≠ 0 могут быть три случая:
-
– при k = 1с–1 – технологический процесс в системе устойчивый и затухающий в до- и зарезонансных режимах;
2ω
-
– при m 〈- λ – технологический процесс неустойчив и неуправляем;
ω 0 2
2 ω 2
-
– при m ≥ - λ – технологический процесс неустойчив в определенном диапазоне и ω 0 2
может быть управляем на его границах.
На основе теории управления динамическими состояниями подсистем алгоритм исследования колебательных процессов в почвообрабатывающих и посевных машинах включает [2]:
-
– определение в каждой подсистеме в соответствии с целью процесса центра вариационной системы (центр бифуркации, особая точка) и чаще всего – это значение агротехнических требований с допустимыми диапазонами;
-
– нахождение теоретического показателя динамической устойчивости заданных показателей процесса и желательности его протекания в одной из зон устойчивости;
-
– установление реального (экспериментального) показателя устойчивости процесса и его положения в реальной зоне устойчивости;
-
– определение запаса устойчивости реального процесса и необходимости изменения возбуждаемой частоты процесса ω λ . В теории регулирования реальный процесс обычно переводят в до- или зарезонансный режимы.
Выбор соответствующей структуры технической системы и ее функционирования в оптимальных режимах нами рассматривается как процесс адаптации выполняемого технологического процесса к заданному состоянию с точки зрения теории автоматического регулирования. Как известно, такую задачу реализуют двумя способами: либо текущим изменением параметров объекта (конструктивного элемента), либо подключением системы управления.
Работа технологической машины и орудия обусловлены созданием определенного динамического состояния исполнительной подсистемы. Согласно [2] для таких систем необходимо установить критерий устойчивости ( m общ ) в зависимости от поставленной задачи. В частности, для почвообрабатывающих агрегатов он имеет вид
4ωλ k mобщ = 〈
ω2 ω ω2
λ+ λ + λ k ω01 + ω02 ω01 + ω02
-
2 ω 2
2 λ 2 , при k = 1 с–1, ω 01 + ω 02
где m общ – параметр устойчивости; ω λ – частота внешних колебаний, подающихся на систему, Гц; ω 0 – собственная частота колебаний элементов подсистемы, Гц; k – размерный коэффициент.
Вынужденная частота колебаний ω λ , поступающая на исполнительную подсистему, включает сумму частот воздействий: элементов агрегата, внешних условий на рабочий орган, трактора, рамы сеялки, пласта почвы. Исследованиями [2] установлено, что значение ω 0 в исполнительных подсистемах агрегатах находится в интервале 5–7 Гц, ω 0 1 – 5–6 Гц, ω 02 – 15– 20 Гц. Более того, именно в диапазоне ω λ – 1–4 Гц возникают резонансные явления в подсистемах глубины хода сошников, при этом существенно нарушается равномерность их хода. Согласно теории автоматического управления режим работы исполнительной подсистемы необходимо обеспечивать в до- или послерезонансном режиме.
Область существования режимов работы почвообрабатывающих орудий должна нахо- диться в зоне отрицательных значений, так как при этом движение системы устойчиво, не превышает собственных колебаний; технологический процесс в системе также устойчивый и затухающий в до- и зарезонансных режимах. Для повышения устойчивости глубины хода рабочих органов (на основе представленной методологии анализа и синтеза исполнительных подсистем сельскохозяйственных машин с частотным управлением их рабочими процессами) определены общие динамические закономерности совместной работы подсистем, обеспечивающие ограни- ченный устойчивый темп подачи энергии.
Рассмотрим подвеску сошника как колебательную систему первого порядка, то есть с од- ной степенью свободы [3, 4]. Схематично представим подвеску и рассмотрим силы, на нее дей- ствующие (рис.).
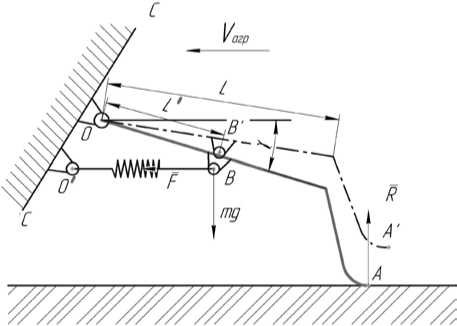
Рис. Схема действия сил на подвеску сошника
Как видно из рисунка, при движении агрегата вперед на подвеску действуют силы: вес механизма – mg (Н), сила упругости пружины – F (Н) и реакция опоры поверхности поля R (Н). В качестве обобщенной координа- ты системы примем угол поворота кулисы подвески сошника относительно горизонтальной плоскости – γ (°).
Для определения закона движения ме- ханизма подвески сошника составим уравнение Лагранжа [5]:
d <дТ) дТ дП I= dt (дү) дү дү , (5)
где Т – кинетическая энергия механизма под- вески, Дж; γ – угол поворота кулисы подвески сошника относительно горизонтальной плоскости; П – потенциальная энергия механизма подвески, Дж.
Кинетическая энергия выразится как
-
2 /2
-
m ■ l ■ ү
Т = —----, Дж, (6)
где m – масса механизма подвески, кг; l – длина кулисы, м; γ/ – угловая скорость поворота кулисы механизма подвески, с–1.
Потенциальная энергия механизма подвески определится как сумма
П = П ( Р ) + П ( F ) + П ( R ) , Дж,
где П ( Р ) - потенциальная энергия силы тяжести, Дж; П ( F ) - потенциальная энергия упругости пружины, Дж; П ( R ) - потенциальная энергия реакции поверхности поля, Дж.
Составляющие П(Р), П(F) и П(R) потенциальной энергии рассчитывают по зависимо стям:
П <Р) = - Mg L ™( ү - ү 0 ) , Дж, (8)
2cos ү
П ( F ) = c L 'А ст 2 s in( Y - Y о ) + c ( L '^АҮ - Y о ) Дж, cos ү 2 cos2 ү
П ( R ) = R ■ AA 1 = R L Sin( Y - Y 0 ) , Дж,
cos ү где с – коэффициент упругости пружины, Н/м; Δст2 – статическое удлинение пружины, м; γ0 – начальное положение кулисы механизма подвески относительно горизонтальной плоскости, рад.
Подставим выражения (8), (9) и (10) в выражение (7)
П = - Mg L Sin(^ о) + cL ^ с ст 2 sin( Y - Y о ) + c ( L ') 2 Sin 2 ( Y - Y о ) + R L Sin( Y - Y о ) , Дж. (11) 2cos y cos y 2cos2 y cos y
После преобразований и подстановки начальных значений получаем уравнение движения подвески γ = f(t)
Y =
sin2,Yо2cos Yо)
cos kt +
sin2 Y о 2 cos2 ү о
рад,
где k – частота свободных колебаний механизма подвески, с–1; t – время, с. Вычисляем частоту свободных колебаний механизма подвески
k
L'
cos L
Yо^
с–1,
где L/ – расстояние от оси вращения кулисы до точки крепления пружины, м.
По выражению (13) возможно определить угол поворота кулисы механизма подвески γ и отклонение глубины обработки от заданного значения при движении сеялки во время работы. Из анализа данного выражения видно, что, меняя плечо (расстояние от оси вращения кулисы до точки крепления пружины L/), можем существенно влиять на собственную частоту колебания подвески. Также повышая или понижая массу сошника и упругость пружины, можем изменять данную частоту – увеличивая массу сошника – снижать частоту, увеличивая упругость пружины – увеличивать частоту. Следует учитывать обстоятельство: при увеличении частоты при равной массе сошника – уменьшается амплитуда, тем самым снижается неравномерность распределения семян по глубине.
Результаты исследований
Проведем расчет частоты и амплитуды колебаний нашей сошниковой группы для определения неравномерности распределения семян по глубине в зависимости от частоты и амплитуды колебания сошниковой группы.
Воспользуемся формулой (13) для расчета амплитуды и частоты предлагаемой подвески сошника, при этом заданные параметры:
-
– расстояние от оси вращения кулисы до точки крепления пружины, L/ = 0,5 м;
-
– длина кулисы до точки крепления сошника, L = 1,0 м;
-
– коэффициент упругости пружины, с = 600 Н/м;
-
– вес сошника, М = 50 Н.
Полученные значения внесем в табл. 1, дополнительно проведем расчет угла поворота кулисы механизма подвески γ и отклонение глубины обработки от заданного значения при движении сеялки во время работы S , а также получаемую при этом равномерность распределения семян по глубине К с .
Анализ табл. 1 позволяет сделать вывод о том, что при существующей конструкции сошниковой группы частота свободных колебаний k равна 3 с–1, но, как было сказано выше, в диапазоне ωλ – 1–4 Гц возникают резонансные явления в подсистемах глубины хода сошников, существенно нарушается равномерность их хода, что подтверждается равномерностью распределения семян по глубине Кс. Исходя из этого снижать собственную частоту колебаний k или ω0 сошников нереально и неэкономично (слишком большая масса сошника увеличит расход топлива), наиболее эффективно повышать собственную частоту колебательной системы путем увеличения жесткости пружины, а также снижать частоту ωλ внешних нагрузок, в частности, использовать динамические частотные ограничители. Поэтому снижение воздействия внешних нагрузок проведем соединения двух сошников на одной кулисе, тем самым увеличив массу колебательной системы (сошника).
Таблица 1
Расчет свободных колебаний колебательной системы сошниковой группы
|
№ п/п |
Масса сошника М , кг |
Расстояние от оси вращения кулисы до точки крепления пружины L/ , м |
Длина кулисы до точки крепления сошника, L , м |
Коэффициент упругости пружины с , Н/м |
Частота свободных колебаний механизма подвески k , с–1 |
Отклонение глубины обработки от заданного значения S , м |
Расчетная неравномерность распределения семян по глубине К с |
|
1 |
5 |
0,3 |
0,47 |
600 |
3,83 |
0,010 |
90,16 |
|
2 |
10 |
0,3 |
0,47 |
600 |
2,71 |
0,014 |
86,08 |
|
3 |
15 |
0,3 |
0,47 |
600 |
2,21 |
0,017 |
82,95 |
|
4 |
20 |
0,3 |
0,47 |
600 |
1,91 |
0,020 |
80,31 |
|
5 |
25 |
0,3 |
0,47 |
600 |
1,71 |
0,022 |
77,99 |
Далее увеличим жесткость пружины. Расчеты приведены в табл. 2.
Расчет свободных колебаний колебательной системы сошниковой группы
Таблица 2
|
№ п/п |
Масса сошника М , кг |
Расстояние от оси вращения кулисы до точки крепления пружины L /, м |
Длина кулисы до точки крепления сошника, L , м |
Коэффициент упругости пружины с , Н/м |
Частота свободных колебаний механизма подвески k , с–1 |
Отклонение глубины обработки от заданного значения S , м |
Расчетная неравномерность распределения семян по глубине К с , % |
|
1 |
10 |
0,3 |
0,47 |
500 |
2,47 |
0,015 |
84,75 |
|
2 |
10 |
0,3 |
0,47 |
1000 |
3,49 |
0,011 |
89,22 |
|
3 |
10 |
0,3 |
0,47 |
1500 |
4,28 |
0,009 |
91,20 |
|
4 |
10 |
0,3 |
0,47 |
2000 |
4,94 |
0,008 |
92,38 |
|
5 |
10 |
0,3 |
0,47 |
2500 |
5,53 |
0,007 |
93,18 |
Выводы
Как видно из табл. 2, увеличение жесткости привело к росту частоты свободных колебаний k и повышению равномерности распределения семян по глубине К с . Но при этом возникает проблема удержания сошников на заданной глубине, для этого предлагается применять лыжеобразные ограничители хода сошника.
Список литературы Моделирование колебательной системы сошник - почва
- Беспамятнова, Н.М. Колебания и вибрации в технологических процессах почвообрабатывающих и посевных машин и агрегатов/Н.М. Беспамятнова. -Зерноград: ВНИПТИМЭСХ, 2008. -224 с.
- Беспамятнова, Н.М. Использование эффектов вибрации в мобильных сельскохозяйственных машинах/Н.М. Беспамятнова, Ю.А. Беспамятнов, Д.А. Подольский//Достижения науки и техники АПК. -2010. -№ 3. -С. 58-59.
- Пат. 128442 Российская Федерация, МПК А01С 7/20. Сошник/А.П. Шевченко, М.А. Бегунов. (РФ). -2013 2013101498/13; заявл. 10.01.2013; опубл. 27.05.2013//Изобретение. Полезная модель. -2013. -№ 15.
- Шевченко, А.П. Двухстрочный килевидный сошник для посева льна/А.П. Шевченко, М.А. Бегунов//Сел. механизатор. -Москва. -2013. -№ 4 (50). -С. 21.
- Власова, Е.А. Приближенные методы математической физики: учебник/Е.А. Власова, В.С. Зарубин, Г. Кувыркин; под ред. В.С. Зарубина, А.П. Крищенко. -М.: Изд-во МГТУ им. Н.Э. Баумана, 2001. -700 с.
