Моделирование квадратно-гнездового посева

Автор: Попов Антон Юрьевич
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Технологии и средства механизации сельского хозяйства
Статья в выпуске: 4, 2020 года.
Бесплатный доступ
Введение. Для пропашных культур оптимальной формой площади питания является квадратная, которая обеспечивается квадратно-гнездовым способом посева. В настоящее время из-за высокой металлоемкости и низкой производительности этот способ посева заменен на пунктирный. Но это не решает задачу рационального распределения семян на поле, и проблема точного размещения растений с оптимальной квадратной формой площади питания остается актуальной. Целью исследования является разработка и анализ имитационной модели квадратно-гнездового посева на основе алгоритма управления исполнительными механизмами секций сеялки с применением устройств для локального координирования посевного агрегата. Материалы и методы. Рассмотрен программируемый квадратно-гнездовой посев с применением локального координирования посевного агрегата и алгоритм для его осуществления. Описано построение имитационной модели посева в программной среде Simulink Matlab с обоснованием ее элементов. Учтены разброс семян в борозде и переменная величина скорости сеялки. Теоретически обосновано количество импульсов на один оборот вала энкодера. Результаты исследования. Построены графики пройденного пути, координаты позиций открытия заслонок и сигналов управления в зависимости от времени. Проведен анализ настроек энкодера. При изменении шага посева и координат первого открытия заслонок отклонение последнего гнезда семян варьируется в диапазоне от -2,6 ∙ 10-3 до 2,7 ∙ 10-3 м. С увеличением скорости сеялки от 1,5 до 3,0 м/с математическое ожидание отклонений гнезд семян увеличивается от 0,054 до 0,218 м, а коэффициент вариации снижается с 61,2 до 15,0 %. Обсуждение и заключение. Анализ имитационной модели квадратно-гнездового посева показал, что алгоритм управления исполнительными механизмами вместе с системой локального координирования работает адекватно и обеспечивает высокую точность размещения гнезд семян на поле. Определены зависимости оптимального количества импульсов на один оборот вала энкодера от заданного шага посева и радиуса путеизмерительного колеса. Выяснено, что величина максимального отклонения последнего гнезда семян не превышает 2,7 мм на 1 000 м (при x = 0,3 м и t = 0,7 м). Установлено, что точность распределения гнезд семян на поле определяется в большей степени скоростью сеялки, нежели настройками измерительного устройства.
Программа управления, квадратно-гнездовой способ, сигнал, энкодер, модель посева, разброс семян, неравномерность распределения
Короткий адрес: https://sciup.org/147221972
IDR: 147221972 | УДК: 631.53.044-047.58 | DOI: 10.15507/2658-4123.030.202004.524-549
Simulation of square cluster planting
Introduction. For cultivated crops, the optimal form of spacing is square form, which is provided by the square cluster method of planting. Currently, due to the high metal consumption and low productivity, this method of planting has been replaced with a single-seed planting one. But this does not solve the problem of rational distribution of seeds in the field, so the problem of plant spacing with the use of the optimal square form of spacing is relevant. The aim of the study is to develop and analyze a simulation model of square cluster planting based on an algorithm for controlling the executive mechanisms of the seeder sections using devices for local coordination of the seeding apparatus. Materials and Methods. A programmable square cluster planting using local coordination of the seeding apparatus and an algorithm for its realization are considered. The article describes the construction of a simulation model of sowing planting in Simulink Matlab with justification of its elements. The seed spreading in furrows and the seeder variable speed are taken into account. The number of pulses per revolution of the encoder shaft is theoretically justified. Results. The graphs of the distance traveled, positions coordinates of the flap opening and control signals depending on the time are constructed. The analysis of the encoder settings is carried out. When varied the plant spacing and the coordinates of the first flap opening, the dimension of the last seed cluster changes in the range from -2.6 ∙ 10-3 to 2.7 ∙ 10-3 m. With the increase in the seeder speed from 1.5 to 3.0 m/s, the mathematical expectation of the seed cluster dimensions increase from 0.054 to 0.218 m, and the coefficient of variation decreases from 61.2 to 15.0%. Discussion and Conclusion. The analysis of the simulation model of the square cluster planting showed that the algorithm for controlling executive mechanisms together with the local coordination system works adequately and provides high precision of placing seed clusters in the field. The dependences of the optimal number of pulses per an encoder shaft revolution on the specified seed spacing and radius of the track measuring wheel are determined. It was determined that the maximum dimension of the last seed cluster does not exceed 2.7 mm per 1 000 m (for x = 0.3 m and t = 0.7 m). It was found that the precision of the distribution of seed clusters in the field is determined more by the seeder speed than by the settings of the measuring device.
Текст научной статьи Моделирование квадратно-гнездового посева
Главной задачей посева как одной из технологических операций возделывания сельскохозяйственных культур является обеспечение благоприятных условий прорастания и дальнейшего вегетативного развития растений, а также размещение растений с оптимальной густотой. Выполнение этих задач возможно лишь при обеспечении заданной нормы высева, равномерном размещении семян на поле и заделке семян на заданную глубину. При этом норма высева и размещение семян на поле определяются биологической площадью питания растения [1; 2]. В агрономии под площадью питания подразумевают площадь участка поля, приходящуюся на одно растение. По существу, ею являются объем почвы, количество питательных веществ, влага, освещение и тепло. В первом приближении площадь питания одного растения устанавливается произведением ширины междурядья и расстояния между растениями в ряду.
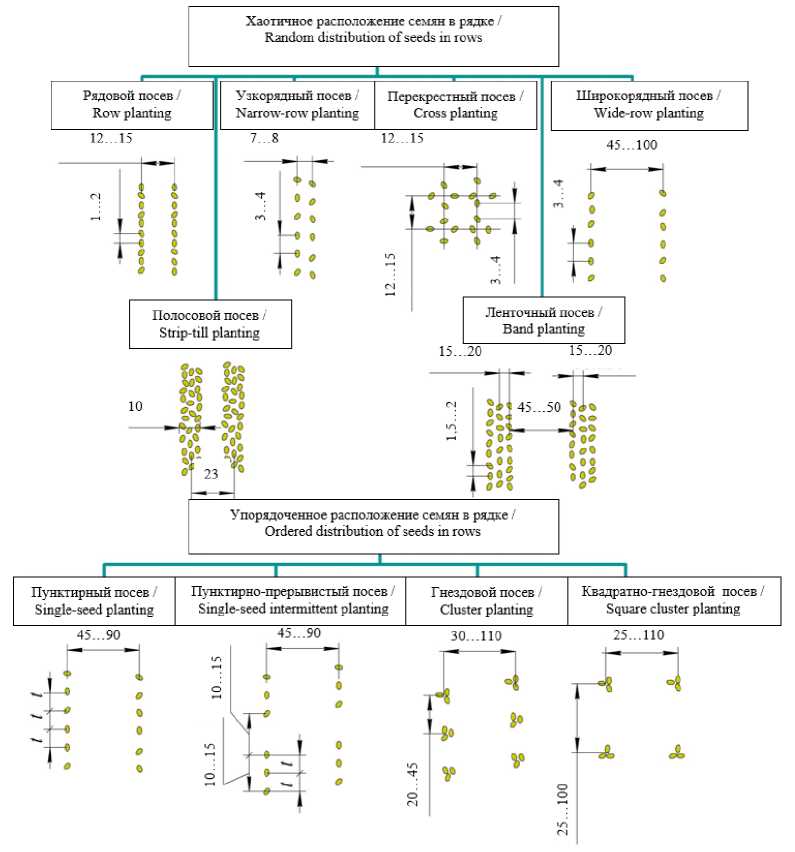
Растения размещаются на поле, а значит, форма и площадь их питания формируются различными способами посева. По нахождению семян в рядке можно выделить посевы с хаотичным и упорядоченным расположением. Схемы и размерные характеристики способов посева, выраженные в сантиметрах, представлены на рисунке 1.
Форма площади питания растений при рядовых способах посева представляет собой прямоугольник с соотношением сторон от 1:6 до 1:10, которые определяются шириной междурядья и расстоянием между растениями в рядке1. Для зерновых культур в связи с малыми площадями питания прямоугольная форма питания приемлема и в совокупности с простотой осуществления посевов получила широкое распространение. Но для пропашных
Том 30, № 4. 2020
культур с большой площадью питания оптимальной будет являться квадратная форма, при которой возможно наиболее полное использование ресурсов почвы [1]. Поэтому для пропашных культур возникают дополнительные требования к размещению растений в рядке. Они должны располагаться с постоянным шагом посева. Для осуществления такой схемы применяются гнездовые способы посевов и их разновидности, такие как квадратный, прямоугольный и т. д.
При гнездовом посеве семена высеваются по несколько штук в гнезда, которые размещаются в междурядьях с заданным шагом. Этот способ проводится для посева бахчевых и некоторых пропашных культур, которые могут расти вместе в гнезде. Если при этом гнезда будут размещаться в рядах с равным шагом как вдоль, так и поперек поля, что приведет к их размещению в углах квадрата, то будет реализован квадратно-гнездовой способ посева c оптимальной формой площади питания.
Несмотря на достоинства квадратно-гнездового посева, он сложен в осуществлении. Для его проведения необходимы специальные квадратногнездовые сеялки с вилками-узлоловителями и мерной проволокой, которая должна растягиваться по всему полю в направлении движения сеялки. Мерная проволока с закрепленными с постоянным шагом упорами при этом служит инструментом координирования сеялки на поле и триггером для формирования гнезд семян. Но из-за высокой металлоемкости, низкой производительности труда и необходимости задействования большого числа вспомогательного персонала для переноса мерной проволоки квадратно-гнездовой способ посева в последнее время не используется. А гнездовой способ был заменен пунктирным, в том числе с увеличен-
30..ЛЮ
Рядовой посев Row planting
Широкор ядный посев / Wide-row planting
Узкорядный посев / Narrow-row planting
Перекрестный посев Cross planting
45..
25...110
0 о о о
-6 о “° о о о
12 15
7...8
45... 100
Упорядоченное расположение семян в рядке / Ordered distribution of seeds in rows
Ar»—*»* ^'23 f*
..15
15...20
15...20
45...50
0»«
3*1 0^0
Хаотичное расположение семян в рядке / Random distribution of seeds in rows
Полосовой посев
Strip-till plantmg
Ленточный посев / Band planting
|
Пунктирный посев / Single-seed planting |
Пунктирно-прерывистый посев / Single-seed intermittent planting |
Гнездовой посев / Cluster plantmg |
Квадратно-гнездовой посев / Square cluster planting |
45...90
Р и с. 1. Классификация рядовых способов посева по расположению семян в рядке F i g. 1. Classification of ordinary methods of sowing by the location of seeds in rows ным шагом посева и групповым высевом семян, который менее трудоемок2. Однако пунктирный посев не решает задачу рационального размещения семян на поле. Так как форма площади питания в таком случае представляет собой прямоугольник, а из-за несовершенства дозирующих устройств и действия множества случайных факторов размещение семян в рядке значительно отклоняется от заданного шага посева. Это приводит к различным по размеру прямоугольным формам площади питания для каждого растения отдельно.
Таким образом, проблема точного размещения семян на поле остается нерешенной. Однако применение систем геопозиционирования дает надежду на лучшее, например, при дифференцированном внесении удобрений в контексте прецизионного земледелия3 [3; 4]. Но точности спутниковой связи недостаточно для координирования посевного агрегата и формирования гнезд семян на поле с переменной высотой рельефа и уклонами. Хотя спутниковое геопозиционирование вполне может служить базой отсчета расстояний [5–7]. Поэтому с развитием технологий точного земледелия, доступностью средств автоматизации и цифровизации сельского хозяйства возникает шанс решения проблемы координированного распределения семян на поле без применения мерной проволоки [8–11]. Это возможно благодаря разработке электронных управляющих систем посевных комплексов, использованию элементов спутникового геопозиционирования и алгоритмов управления высевом семян с применением парадигмы локального измерения расстояния [12–15].
Целью исследования являются разработка и анализ имитационной модели квадратно-гнездового посева на основе алгоритма управления исполнительными механизмами секций сеялки с применением устройств для локального координирования посевного агрегата на поле.
Обзор литературы
Гнездовой способ посева и его варианты известны и применяются достаточно давно. Так, возделывание кукурузы, подсолнечника и других пропашных культур начиналось именно гнездовым ручным способом. В начале 20 века в США, Германии, Франции и других странах уже производились квадратно-гнездовые сеялки. В США применялись четырехрядные сеялки с шириной междурядья 0,9–1,05 м. Привод высевающих аппаратов осуществлялся от ходовых колес сеялки, а клапанов – от мерной проволоки.
В России также велись поиски технических конструкций сеялок для осуществления квадратно-гнездового и шахматного посева. Так, в 1923 году А. А. Воронковым была предложена конструкция конной гнездовой барабанной сеялки, на которую был выдан патент № 1441. В 30-х годах XX века П. А. Бинковским была разработана первая отечественная кукурузная сеялка квадратно-шахматного посева. Однако в связи с Великой Отечественной войной производство кукурузных сеялок было организовано только в 1947 году. Это была прицепная шестирядная сеялка СШ-6 конструкции Акимовской машиноиспытательной станции. Сеялка была снабжена корректировочным механизмом с ручным управлением, обеспечивающим равные расстояния между гнездами семян в рядке. Ориентиром служили предварительно нарезанные конным маркером поперечные бороздки. Корректировочный механизм, требующий постоянного внимания сеяльщика, вскоре был заменен приспособлением конструкции всесоюзного института механизации (ВИМ), мерная проволока которого обеспечивала заданное расстояние между гнездами в рядке без корректировочного механизма и маркировки поля4.
С середины XX века в СССР активно начал внедряться квадратно-гне- здовой посев кукурузы и других пропашных культур с применением специальных сеялок СКНК-6 и ее аналогов (рис. 2). Однорядные секции рабочих органов этих сеялок имели индивидуальный привод высевающих аппаратов с регулируемым передаточным отношением. Сеялка оснащалась системой узлоловителей, двумя натяжными станциями и катушкой с мерной проволокой. На мерной проволоке закреплялись упоры, расстояние между которыми определялось шагом посева.
Привод высевающих аппаратов осуществлялся от ходовых колес, а клапанов сошников – от мерной проволоки. После прохода сеялки по полю вперед и назад мерную проволоку переносили вручную звеном в 9–11 человек таким образом, чтобы следующие проходы сеялки были строго параллельными. Данная технология и организация посева были сложными. Кроме того, после переноса проволоки рабочее звено оставалось на поле без работы, что было нерационально.
Для снижения трудоемкости посева был разработан и внедрен машинный диагональный перенос мерной проволоки. Вместо натяжных лебедок использовались отпускные колы, предназначенные для удлинения проволоки при приближении посевного агрегата к концу гона с сохранением постоянного натяжения проволоки.
Внедрялись в производство квадратно-гнездовые сеялки с синхронизированным приводом высевающих дисков и клапанов сошников. Сошники выполнялись двухканальными с двумя гнездообразующими клапанами и перекидным клапаном-делителем вверху. Вращение высевающих дисков было периодическим. Включение в работу клапанов и высевающих дисков осуществлялось от мерной проволоки.
Одновременно с промышленным выпуском квадратно-гнездовых сеялок происходил поиск других путей координирования высева семян. Вместо мерной проволоки предлагалось использовать ультразвуковое управление сеялкой на основе принципа эхолокации, радио-дистанционное управление исполнительными механизмами сеялки, управление по сигналам магнитных датчиков, импульсов, применение меток изотопов и другие варианты [16–18].
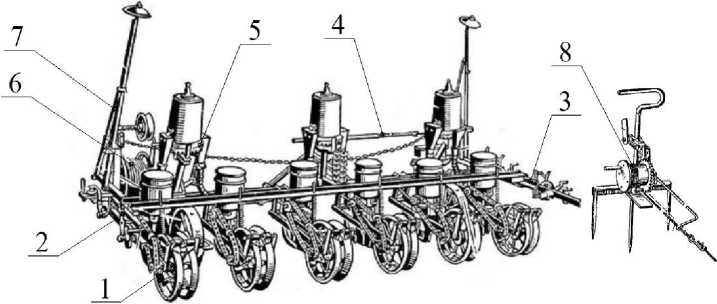
Р и с. 2. Квадратно-гнездовая сеялка СКНК-6:
1 – высевающая секция; 2 – левый узлоловитель; 3 – правый узлоловитель; 4 – вал-муфта;
5 – туковысевающая система; 6 – катушка с мерной проволокой; 7 – маркер; 8 – натяжная станция
F i g. 1. Square cluster seeder SKNK-6:
1 – seeding section; 2 – left slot-out hooks; 3 – right slot-out hooks; 4 – shaft-clutch;
5 – mineral fertilizer distribution system; 6 – reel with a measuring wire; 7 – marker; 8 – tension station
Но эти и аналогичные им способы не получили распространения из-за недостаточной направленности излучения, потерь сигнала, шумов, сложности использования, что приводило к значительным погрешностям при посеве.
Одновременно с конструктивно-техническим совершенствованием гнездовых сеялок проводились и теоретические исследования распределения семян, хотя и менее интенсивно. Так, теоретическим и экспериментальным изучением размещения семян на поле и, в частности, гнездовым посевом занимались З. Азимова, В. А. Белодедов, Г. М. Бу-зенков, В. В. Василенко, А. Д. Геленов, И. М. Иванов, С. В. Кардашевский, В. Е. Комаристов, П. Я. Лобачевский, С. А. Ма, Т. Д. Мельникова, Л. Л. Рас-улев, Н. Т. Хайченко, В. М. Холзаков и другие исследователи.
Г. М. Бузенков и С. А. Ма определили оптимальную густоту насаждения ряда пропашных культур, разработали номограммы для расчета гнездового посева и числа растений в гнездах5. Также ими были предложены теоретические модели пунктирного и пунктирно-прерывистого посева.
На базе теории вероятностей П. Я. Лобачевским были предложены методы обоснования агротехнических требований к посевным машинам, прогноз распределения семян и растений при различных видах посева [19].
С. В. Кардашевский рассмотрел и построил формализованные модели группового высева семян, провел экспериментальное исследование группового высева6. При этом определение причин распределения групп семян выполнялось на основе законов механики и при помощи статистических моделей. Методом цифрового моделирования он установил, что при выносе семян груп- пами в результате рассеивания их во время падения исходный поток семян преобразуется в простейший.
В. В. Василенко в своих работах подтвердил важность оптимального размещения каждого растения на своей площади питания. На основе закона гамма-распределения им была определена наилучшая по урожайности густота насаждений для ряда пропашных и технических культур. Например, для сахарной свеклы она составляет 4,5–5,0 шт/м, для подсолнечника – 5,0–5,5 шт/м, для клещевины – 4,0 шт/м, для кукурузной силосной массы – 11 шт/м [2]. Кроме того, В. В. Василенко уточнил методику прогнозирования урожайности пропашных культур по параметрам распределения семян и разработал алгоритмы расчета на ЭВМ.
И. М. Иванов провел экспериментальные исследования квадратно-гнездового способа посева на примере высева семян кукурузы сеялкой СКГ-6. Им было изучено влияние поступательной скорости сеялки и заглубления сошников на качество распределения семян. Определено, что с увеличением скорости посева от 1,09 до 1,86 м/с отклонение гнезд семян от шайб мерной проволоки возрастает от –4,0 до 9,96 см соответственно. При этом отклонение гнезд от осевой линии поперечного рядка, выраженное в процентах гнезд с отклонением не более 5 см в пределах одного захвата сеялки, при возрастании скорости от 1,09 до 1,62 м/с варьируется слабо – от 70,4 до 75,3 %. Но при дальнейшем возрастании скорости сеялки до 1,86 м/с отклонение гнезд увеличивается уже значительно и составляет 62,2 %. В результате исследований им было рекомендовано проводить квадратно-гнездовой посев с мерной про- волокой при скорости сеялки не более 1,86 м/с7. Так как при скорости посева выше 1,86 м/с устойчивость рабочего процесса сеялки значительно нарушается. Кроме того, И. М. Ивановым была определена трудоемкость и производительность квадратно-гнездового способа посева при различных вариантах переноса мерной проволоки. Однако наблюдения показали, что увеличение производительности сеялки возрастает в основном за счет увеличения длины гона, которая ограничивается размером мерной проволоки.
Применение химических препаратов для уничтожения сорной растительности, получивших широкое применение в 70-е годы XX века, позволило заменить квадратно-гнездовой способ пунктирным. Промышленность отреагировала на это производством сеялок СКПН-6 и СКПН-8 без сложных механизмов гнездообразования8. Но использование мерной проволоки и отпускных колов по-прежнему не позволяло повысить производительность труда, приводило к низкой скорости посева и высоким требованиям, предъявляемым к квалификации тракториста и сеяльщиков. Это в настоящее время привело к окончательному отказу от данного способа посева в современных технологиях возделывания и вместе с этим к прекращению научно-практических и теоретических исследований по оптимизации размещения семян пропашных культур, в том числе организации квадратно-гнездового посева.
В настоящей статье предлагается рассмотреть один из вариантов проведения квадратно-гнездового посева пропашных культур с применением программного формирования гнезд семян и локального координирования сеялки с элементами точного земледелия. Это позволит разместить семена на поле с оптимальной квадратной формой площади питания и обеспечит повышение урожайности возделываемой культуры при одновременном уменьшении металлоемкости и увеличении производительности посева.
Материалы и методы
Для размещения семян в гнездах по углам квадратов каждая посевная секция сеялки оснащается исполнительным механизмом в виде шарнирной заслонки, установленной под высевающим аппаратом. Заслонки оснащаются электромагнитным приводом, управляемым микроконтроллером.
Аналогом мерной проволоки с упорами и отпускных колов, которые стали причиной отказа от квадратно-гнездового способа посева, служат глобальные спутниковые системы GPS, ГЛОНАСС. Однако предлагается использовать сигналы со спутника только как базу отсчета расстояний. Для этого предварительно формируется электронная карта засеваемого поля, которая может быть получена в результате предшествующего спутникового мониторинга полей хозяйства или в результате аэросъемки беспилотными летающими аппаратами (БПЛА). При подготовке электронной карты поля определяются прямолинейные границы засеваемого поля и их координаты, которые загружаются в память микроконтроллера и будут служить линиями отсчета для посевного агрегата, то есть выполнять функцию отпускных колов. Для локального координирования сеялки на поле в пределах линий отсчета на нее устанавливается измерительное устройство, которое включает путеизмерительное колесо диаметром 0,42 м и инкрементальный энкодер, жестко соединенный с осью колеса [20]. Инкрементальный энкодер представляет собой датчик угла поворота вала. На каждый оборот вала путе- измерительного колеса энкодер генерирует определенное количество импульсов, которое задается заранее. Таким образом, каждому сигналу энкодера будет соответствовать определенный пройденный путь сеялки. Сигналы эн-кодера поступают на микроконтроллер, где производится их постоянное суммирование и определяется пройденное расстояние сеялки в реальном режиме времени.
Во время холостого хода и разворотов при совпадении координат текущего положения сеялки с предварительно загруженными координатами линий отсчета электронной карты поля ми- кроконтроллер включает или отключает энкодер измерительного устройства. Координаты сеялки определяются посредством GPS-приемника, установленного на посевном агрегате и связанного с микроконтроллером.
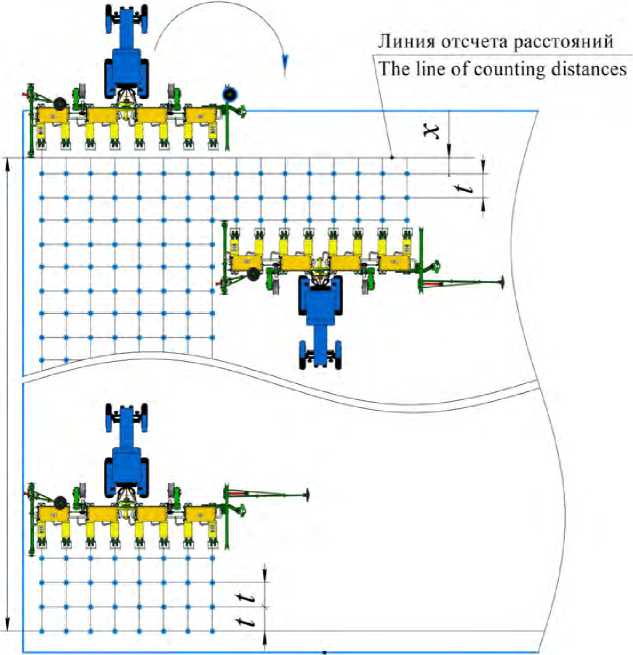
Для управления заслонками посевных секций сеялки на микроконтроллер загружается специальная программа управления и задается произвольный шаг посева t , который определяется нормой высева, шириной междурядья и агротехническими требованиями, предъявляемыми к высеваемой культуре. Схема квадратно-гнездового посева представлена рисунке 3.
\ Линия отсчета расстояний The line of counting distances
Р и с. 3. Схема квадратно-гнездового посева
F i g. 3. Scheme of square cluster planting
Алгоритм программы управления исполнительными механизмами в виде блок-схемы представлен на рисунке 4. Квадратно-гнездовой посев осуществляется следующим образом.
В начале первого прохода сеялка пересекает координаты линии отсчета расстояний. При этом включается энкодер измерительного устройства и запускается программа управления исполнительными механизмами посевных секций. В программе предварительно заданы переменные: шаг посева t , текущее перемещение сеялки l , координаты открытия заслонок посевных секций l к, координаты первого открытия заслонок x. По умолчанию в начале первого прохода переменные l к , l и x равны нулю.
Когда сеялка проходит расстояние, соответствующее заданному шагу посева t , микроконтроллер активирует исполнительные механизмы посевных секций, которые сбрасывают порции семян в борозды. В процессе движения сеялки в цикле программы управления осуществляется непрерывное вычисление разности расстояний между текущей позицией сеялки и ее предшествующей позицией, занимаемой на момент последнего открытия заслонки l к секции. Открытие заслонок посевных секций происходит при равенстве разности l к – l заданному шагу посева t [21] .
При достижении координат противоположной линии отсчета расстояний микроконтроллер отключает энкодер измерительного устройства. При этом происходит выход из цикла программы с последующим сохранением в постоянное запоминающее устройство микроконтроллера расстояния x от последнего места открытия заслонок до отключения энкодера.
Далее сеялка совершает разворот и начинает второй проход. При этом производится активация энкодера измерительного устройства и обнуление переменных l и lк. При перемещении сеялки на расстояние x программа управления подает сигнал на открытие заслонок и высев семян в борозду [21]. Последующие открытия заслонок осуществляются через расстояние шага t в соответствии с алгоритмом программы управления (рис. 4).
При достижении координат линии отсчета расстояний в конце второго прохода производится отключение измерительного устройства с сохранением нового значения переменной x , которое будет использоваться в начале следующего прохода. Далее цикл повторяется.
Таким образом гнезда семян размещаются на поле по углам квадрата. При таком способе реализации квадратно-гнездового посева появляется возможность снижения металлоемкости и трудоемкости посева, улучшение точности размещения гнезд семян на поле с переменным рельефом и уклоном поля.
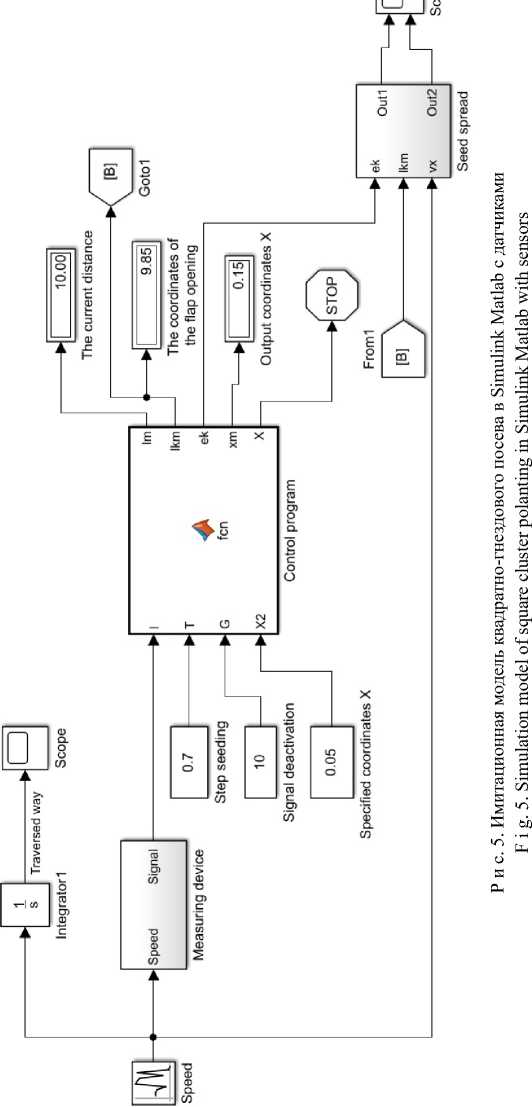
Для анализа представленного алгоритма управления и взаимодействия элементов сеялки разработана имитационная модель квадратно-гнездового посева в программной среде Simulink Matlab, представленная на рисунке 5. Программный пакет Simulink Matlab был выбран как среда разработки исходя из возможности проведения модельно-ориентированного программирования с хорошей и гибкой визуализацией результатов численного эксперимента и удобной обработкой полученных данных инструментами Matlab.
При построении модели были приняты следующие допущения: границы поля приняты прямолинейными, движение сеялки по полю осуществляется перпендикулярно линиям отсчета координат, высевающий аппарат обеспечивает одноштучное дозирование семян без пропусков, масса семян одинаковая, скорость сеялки изменяется по закону нормального распределения, в процессе сброса семян исполнительными механизмами посевных секций сопротивление воздуха не учитывается, сброшенные семена не отскакивают после удара о дно борозды, семена по-
Начало / Start
Ввод переменных: t , l = 0, l к = 0, x из ПЗУ / Input of variables: t , l = 0, l к = 0, x from ROM
Определение оптимального числа импульсов энкодера / Determining the optimal number of the encoder pulses
V
Получение данных с измерительного устройства о перемещении сеялки l / Getting the data on the seeder movement l from the measure device

l - lк = t l =x нет / no да / yes да / yes
нет / no
V
V
Открытие заслонок / The opening of the flaps
нет / no
Сигнал деактивации / Deactivation signal да / yes
x = l - l к
Сохранение значения x в ПЗУ/ Storing the values of x in ROM
Отключение энкодера / Deactivation of the encoder
Конец / End
Р и с. 4. Блок-схема алгоритма управления
F i g. 4. Block diagram of the control algorithm
Технологии и средства механизации сельского хозяйства
сле сброса исполнительным механизмом падают с ускорением свободного падения.
Рассмотрим структурную схему имитационной модели квадратно-гнездового посева (рис. 5). При проведении реального посева скорость посевного агрегата непостоянна и зависит от множества неуправляемых факторов, таких как микрорельеф поверхности поля, сопротивление почвы и др. Для учета изменения скорости в модель вводится блок Random Number, с помощью которого задается среднеарифметическая величина скорости и дисперсия, определяющая ее колебания. Так как скорость является первой производной перемещения, то пройденное расстояние сеялкой в модели определяется с помощью блока Integrator, который интегрирует выходной сигнал скорости по времени.
Алгоритм программы управления заслонками каждой посевной секции (рис. 4) реализован с помощью блока Control Program в виде функции, записанной в блоке вида Matlab Function.
На вход блока Control Program при помощи блоков, моделирующих постоянный сигнал, задаются следующие параметры: шаг посева t , расстояние x первого открытия заслонок для высева семян и значение расстояния отключения энкодера. Расстояние х в начале первого прохода сеялки устанавливается равным 0. Блок Signal Deactivation, определяющий расстояние отключения измерительного устройства, моделирует достижение сеялкой координат линии отсчета расстояний в конце прохода и тем самым определяет длину поля.
Из порта ek блока Control Program выводится сигнал управления открытием заслонок посевных секций сеялки, который равен 1 в момент достижения расчетом расстояний заданного шага t посева и равен 0 в остальных случаях. Также регистрируется сигнал x, который определяется как расстояние от последнего открытия заслонок до линии отсчета расстояний поля. Значение x выводится по окончании расчета рассматриваемой модели в момент генерации сигнала ненулевого значения на блок Stop. Данный блок останавливает расчет модели, когда входные данные, подаваемые на него, не равны 0. Таким образом, с помощью блоков Signal Deactivation и Stop происходит управление завершением расчета модели и симуляция деактивации измерительного устройства.
Для последующей обработки и визуализации результатов расчета из блока Control Program дополнительно выводятся сигналы lkm – расчетное расстояние открытия заслонок и lm – текущее дискретное расстояние, которое определяется из выражения:
l m = k l ∙ l ,
где kl – расстояние, пройденное сеялкой за один сигнал энкодера, м; l – сигналы, поступающие с энкодера в форме последовательного ряда целых натуральных чисел, l = 0, 1, 2, 3 … n .
Расстояние kl определяется по формуле:
, 2 u R
ki = ,
n
где R – радиус путеизмерительного колеса, м; n – число импульсов энкодера за один оборот вала путеизмерительного колеса, шт.
Все выходные параметры блока Control Program, кроме блока Stop, визуализируются с помощью блоков числового отображения входных значений Displey и в виде временных графиков Scope, как это показано на рисунке 5.
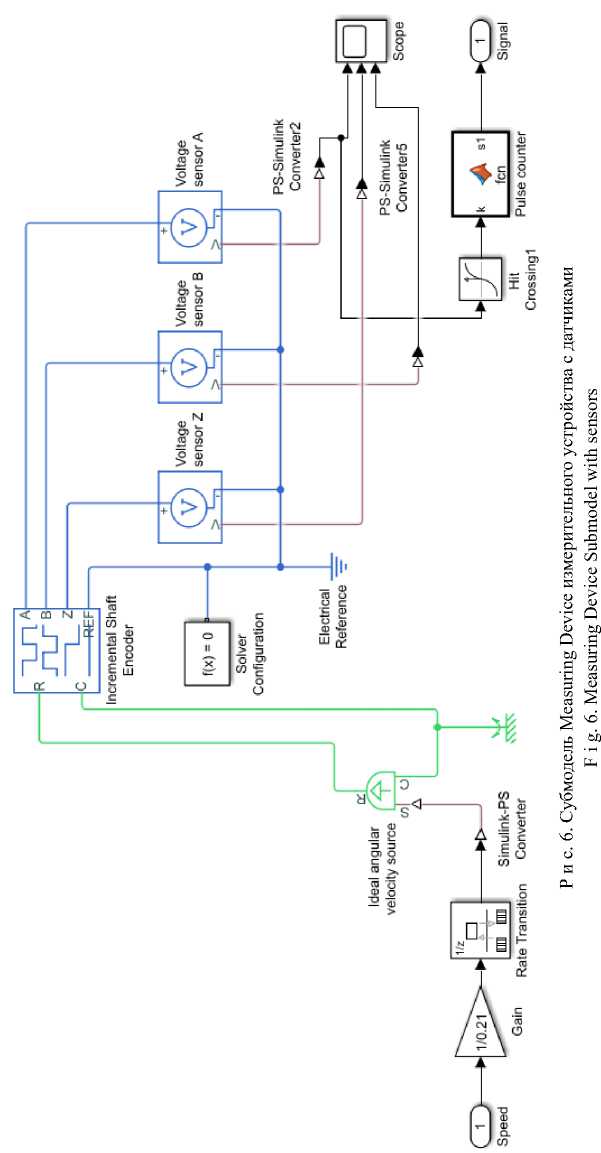
Для моделирования измерительного устройства в модели применена субмодель Measuring Device, схема которой представлена на рисунке 6. Здесь с помощью блоков Gain и Ideal Angular Velocity Source происходит преобразование скорости посевного агрегата в частоту вращения путеизмерительного колеса, которая служит входным параметром для блока Incremental Shaft Encoder, моделирующим работу инкрементального энкодера, установленного на ось колеса. Блок Incremental Shaft Encoder генерирует на портах A и B за один оборот вала n импульсов, которые задаются в параметрах данного блока перед запуском расчета модели. Сигналы на портах А и В смещены друг относительно друга на 90°, что позволяет определять направление вращения. На выходе Z производится один импульс за один оборот вала, который служит для контроля и корректировки работы энкодера. Для измерения пройденного пути, а значит подсчета количества сигналов энкодера, достаточно использовать один порт В. Выходные порты A, B и Z определяются относительно опорного порта REF, который заземляется. Для регистрации сигналов в субмодели Measuring Device введены блоки Voltage Sensor, которые симулируют работу вольтметров.
Для подсчета числа импульсов эн-кодера в субмодели используется блок Pulse Counter в форме блока Matlab Function. В этом блоке реализован простой счетчик, который суммирует каждый сигнал, приходящий с порта В энкодера Incremental Shaft Encoder, и передает эту сумму на каждом такте расчета модели на входной порт блока Microcontroller.
Так как длительность импульсов энкодера непостоянна и зависит от заданного количества импульсов n, это приводит к тому, что в течение нескольких тактов счета модели на блоке Pulse Counter будет удерживаться ненулевой сигнал энкодера, что приведет к погрешностям в подсчете импульсов. Поэтому возникает необходимость в преобразовании импульсов энкоде-ра в единичные сигналы, которые не будут зависеть от количества импульсов n. Для этого используется блок Hit Crossing, который выдает единичный импульс, когда входной сигнал превысит задаваемое значение в направлении увеличения сигнала.
Одним из важных параметров инкрементальных энкодеров является разрешающая способность, которая характеризует количество сигналов за один оборот вала. Несмотря на то, что этот параметр у современных устройств находится в пределах 5 000–10 000 имп/об, настройка энко-дера в сторону высоких значений разрешающей способности еще не означает, что это даст высокую точность измерений при формировании гнезд семян. Связано это с тем, что энкодер генерирует сигналы дискретно, что вносит погрешности при измерении расстояний. Так, учитывая выражение (2), количество импульсов энкодера nt , приходящихся на один шаг посева t , можно определить по формуле:
n t
t k l
где t – заданный шаг посева, м.
В выражении (3) квадратные скобки обозначают математическое округление результата вычисления к ближайшему целому числу, так как максимальная абсолютная погрешность такого метода округления, не превысит ±0,5 от последнего сохраняемого разряда результата вычисления.
Тогда дискретное расстояние, проходимое сеялкой за nt импульсов энко-дера, будет определяться по формуле:
d = nt • k l . (4)
При этом отклонение гнезд семян от заданной позиции сброса за один шаг посева t составит:
A t = t - nt • k, . (5)
Отрицательная величина отклонения Δ t означает, что сброс порции семян
будет производиться до прохождения сеялкой заданной позиции сброса.
Количество гнезд семян n c, сформированных за один проход сеялки, определяется по формуле:
n c
L t
где L – длина поля, м. При вычислении дроби в формуле (6) следует производить округление к меньшему числу.
Таким образом, отклонение гнезд семян за один шаг посева Δ t при движении сеялки по полю c каждым шагом посева t будет накапливаться и приводить к увеличению значений отклонений последующих гнезд семян относительно начала отсчета координат. Поэтому в конце прохода сеялки максимальное отклонение последнего гнезда семян составит:
A L = A t • nc . (7)
Из формул (2–4) следует, что в результате дискретизации измерения расстояния посредством путеизмерительного колеса отклонения Δt и ΔL являются неизбежными, но их можно свести к минимуму путем подбора радиуса путеизмерительного колеса R, заданного шага посева t и числа импульсов энко-дера за один оборот вала n. Однако для настройки точности размещения гнезд подходит только число импульсов эн-кодера за один оборот вала n. При этом смещения гнезд семян Δt и ΔL не будут однозначно определяться числом импульсов энкодера за один оборот вала n. То есть выбор заведомо больших значений n энкодера необязательно будет приводить к уменьшению погрешности за один импульс Δ, который представляет собой, как видно из формулы (5), дробную часть результата деления значений параметров, входящих в формулы (3; 4). Кроме того, с изменением заданного шага посева t будет всегда возникать необходимость нового пои- ска оптимального количества импульсов энкодера n. Поэтому на этапе ввода параметров посева методом численного перебора по формулам (3–7) определяется оптимальное значение n энкодера, которое затем передается в программу управления микроконтроллера.
Для автоматического задания параметров решателя модели Simulink в субмодель введен блок Solver Configuration. Для соединения блоков, работающих с физическими размерными сигналами Incremental Shaft Encoder, Ideal Angular Velocity Source и Voltage Sensor с остальными блоками, определяемыми безразмерными характеристиками, в субмодели используются преобразовательные блоки PS-Simulink Converter.
Для обработки связи между блоками, работающими с разной скоростью, применяется блок Rate Transition, конфигурация которого по умолчанию обеспечивает безопасную и детерминированную передачу данных. Поведение этого блока зависит от настроек параметров или времени выборки его входных и выходных портов.
Известно уравнение движения семени, сброшенного в борозду, определяющее его координаты [22]:
' X = ( v c - vox ) • t
<
g • t 2 ,
Y = ^T + v oy ■t
где v c – скорость сеялки, м/с; vox , voy – составляющие начальной скорости с y е-мени в момент сброса в борозду, м/с; t – время, с; g – ускорение свободного падения, g = 9,8 м/с2.
Исходя из принятых допущений, преобразовав уравнение (8), определим разброс семян X вдоль борозды относительно места сброса заслонкой посевной секции сеялки по формуле:
X = ( V c " v o) ■ ^-gT • (9)
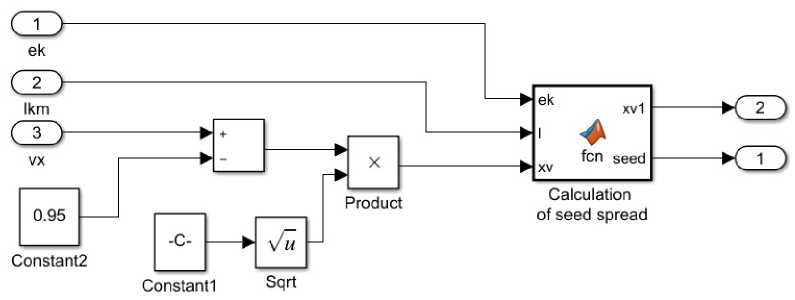
Р и с. 7. Субмодель Seed Spread F i g. 7. Seed Spread Submodel
Из выражения (9) видно, что с изменением скорости сеялки будет меняться и разброс семян в борозде. Для моделирования динамики разброса семян в борозде построена субмодель Seed Spread, представленная на рисунке 7.
Блок Calculation of Seed Spread вычисляет абсолютное положение семян в борозде l с с учетом выражения (9), местоположения сеялки на момент открытия заслонок посевных секций и текущего значения скорости. Для этого на вход блока Calculation of Seed Spread подаются с выходных портов ek и lkm блока Microcontroller сигналы управления открытием заслонок и расчетное расстояние открытия заслонок lkm сеялки. При положительном значении сигнала, приходящего с порта ek, фиксируется значение lkm , которое затем используется в вычислении l с по формуле:
l c = l km + X . (10)
Результаты исследования
После построения имитационной модели квадратно-гнездового посева (рис. 3) для анализа алгоритма управления проведен ряд расчетов при различных параметрах и режимах работы системы управления исполнительными механизмами посевных секций сеялки.
Для регистрации сигналов в графическом или табличном виде в модель по мере необходимости добавляются или удаляются блоки Scope и Display, а полученные данные обрабатываются программными средствами Matlab.
В начале необходимо проанализировать, как ведет себя алгоритм управления, в частности при шаге посева t = 0,7 м, средней скорости сеялки v ср = 2,5 м/с и дисперсии распределения знрачений скорости D = 0,3 м/с. При данных параметрах построены совмещенные графики пройденного пути, координаты позиций открытия заслонок посевных секций, а также сигналов управления заслонками в зависимости от времени (рис. 8).
Как видно из совмещенных графиков, алгоритм управления исполнительными механизмами работает адекватно. Сигналы управления открытием заслонок генерируются на каждом шаге посева t без пропусков. Различие интервалов между сигналами управления на графиках (рис. 8) обусловлено регистрацией сигналов по времени. При этом сигнал управления подается в зависимости от пройденного пути, который переменен во времени.
Как было сказано выше, в связи с дискретностью измерения пройденного
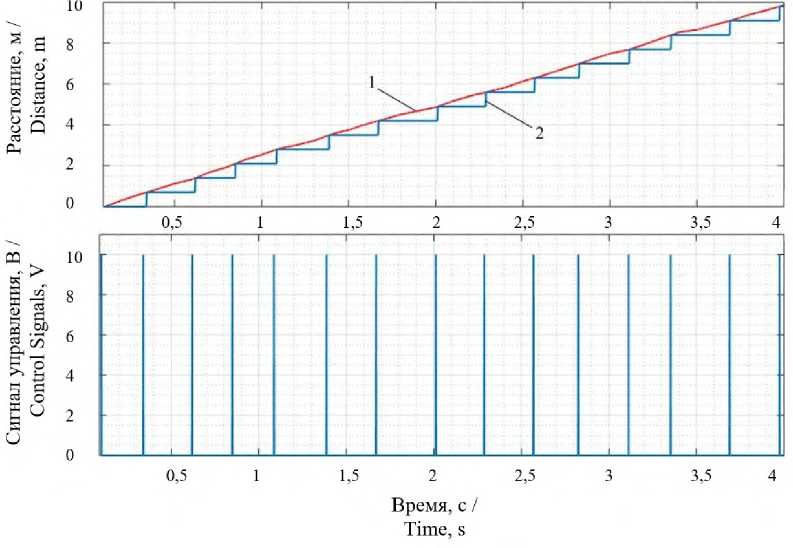
Р и с. 8. График сигналов управления открытием заслонок на посевных секциях: 1 – пройденный путь; 2 – координаты открытия заслонок посевных секций
F i g. 8. The graph of signals to control opening flaps on seed sections: 1 – traversed way; 2 – coordinates of the opening of the seed section flaps
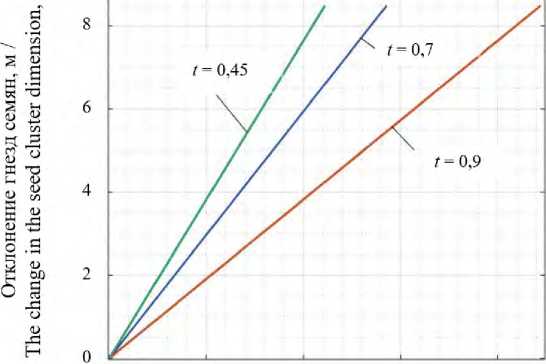
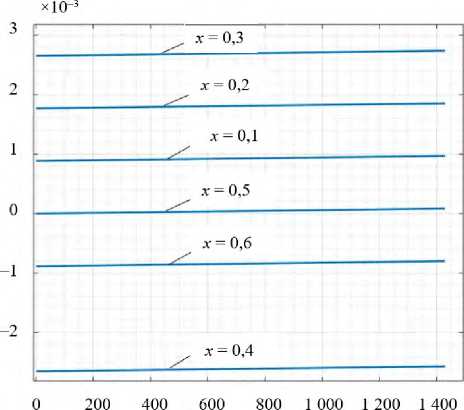
сеялкой расстояния возникает отклонение гнезд семян относительно заданных шагом посева t позиций сброса семян, которые зависят от количества импульсов энкодера n . Определим отклонения гнезд семян при различных значениях шага посева t и расстояниях при первом открытии заслонок x . При этом число импульсов энкодера n определяется программой предварительной настройки энкодера под условия посева и составляет 994, 213, 497 имп/с при шаге посева t , равном 0,45, 0,7, 0,9 м соответственно (рис. 9). Дополнительно при шаге t = 0,7 м ступенчато варьировалось значение позиции первого открытия заслонки x от 0,1 до 0,6 м.
Из графиков (рис. 9) видно, что абсолютное минимальное значение отклонения последнего гнезда семян
Δ L = 8,5 ∙ 10–5 м наблюдается на всех t и x = 0, а абсолютное максимальное значение составило Δ L = 2,7 ∙ 10–3 м при x = 0,3 м. На графике (рис. 9b) значения отклонения гнезд семян Δ L , расположенные в области отрицательных чисел, говорят о том, что открытие заслонок осуществляется раньше заданного шага посева t .
Можно отметить, что величина отклонений последнего гнезда при x > 0 на несколько порядков выше, чем при x = 0 м, и находится в пределах от –2,6 ∙ 10–3 до 2,7 ∙ 10–3 м. Это объясняется работой программы подбора числа импульсов энкодера, которая определяет оптимальное значение n для заданного шага посева t , но при этом не учитывает значение расстояния первого открытия заслонок x , в случае если
S
Х10"5
O 500 1 000 1 500 2 000
Номер гнезда с семенами в борозде / The number of the cluster with seeds in the furrow
-
a)

Номер гнезда с семенами в борозде / The number of the cluster with seeds in the furrow
-
b)
Р и с. 9. Отклонение гнезд семян на длине прохода 1 000 м при различных значениях шага посева t и координатах первого открытия заслонки x :
-
a) t = 0,45 м, t = 0,7 м и t = 0,9 м при x = 0; b) x > 0 м при t = 0,7 м
F i g. 9. Deviation of seed clusters at the passage length of 1,000 m at different values of the seeding step t and coordinates of the first opening of the flap x : a) t = 0.45 m, t = 0.7 m and t = 0.9 m at x = 0;
-
b) x > 0 m at t = 0.7 m
оно отлично от шага t . Соответственно, при первом открытии заслонок число импульсов энкодера n неоптимально для текущего значения x . Это приводит к большему отклонению позиции первого гнезда по ходу движения сеялки, а на графике (рис. 9b) наблюдается начальное значение отклонения Δ L , отличающееся от нуля. Однако формирование следующих гнезд семян по ходу движения сеялки идет с шагом t , для которого n оптимизировано, и на графиках (рис. 9b) видно монотонное и на порядок меньшее нарастание отклонения Δ L , которое в конце прохода сеялки при перемещении на 1 000 м находится в пределах 0,8–2,7 мм. Таким образом, представленный алгоритм управления открытием заслонок с локальным измерением пройденного расстояния обеспечивает высокую точность размещения семян на поле по углам квадрата, а отклонения последнего гнезда незначительны по сравнению с агротехническими показателями, предъявляемыми к посеву пропашных культур.
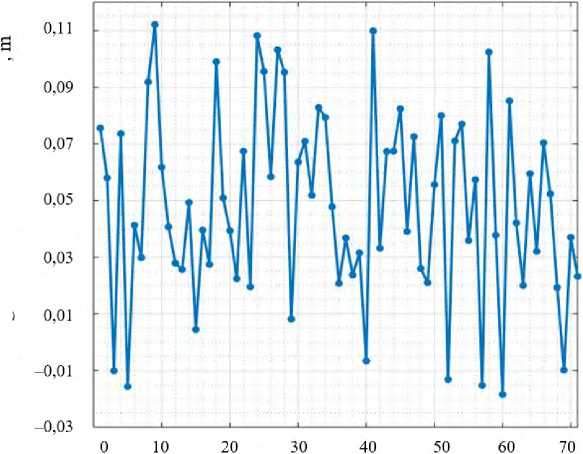
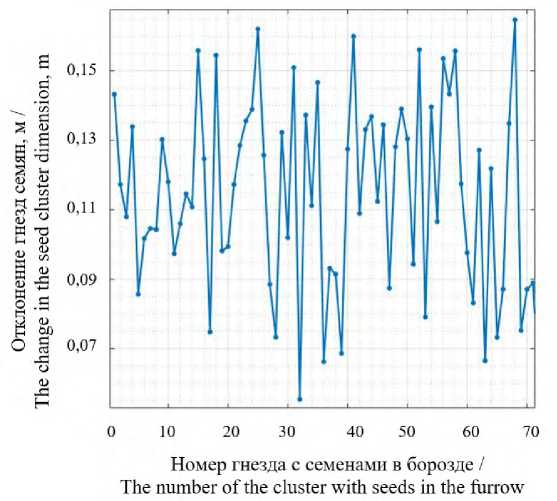
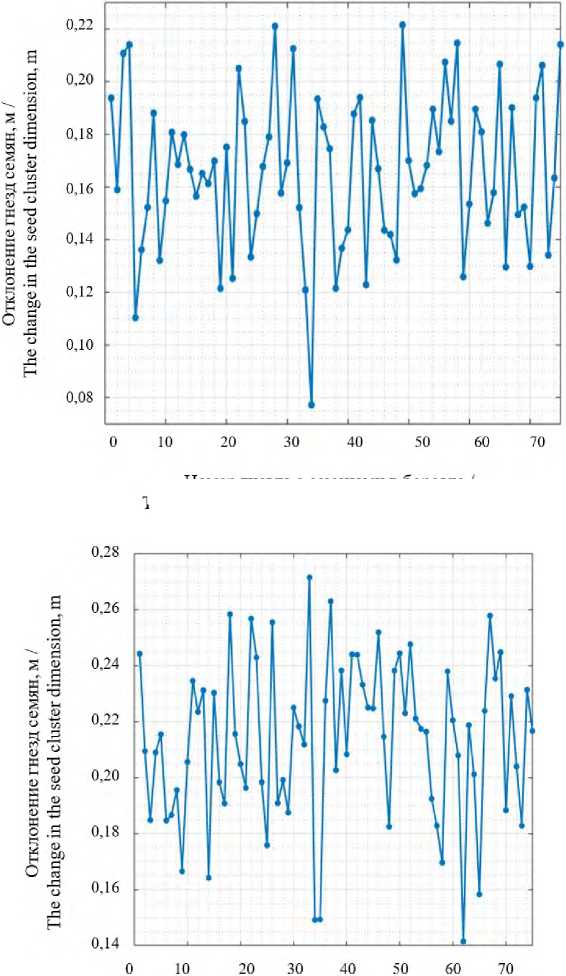
Далее рассмотрим распределение семян в борозде после их сброса. На рисунке 10 представлены графики отклонений гнезд семян в борозде относительно заданный шагом посева t позиции сброса при изменении скорости сеялки от 1,5 до 3,0 м/с. Расчет проводился на длине прохода се- ялки 100 м при шаге посева t = 0,7 м и x = 0 м. На графиках показаны отклонения гнезд на 50 м прохода сеялки. Результаты статистической обработки полученных данных, которая проводилась в рабочей среде Workspace Matlab, сведены в таблицу.
Из таблицы видно, что с увеличением скорости сеялки отклонение семян увеличивается, что видно по изменению математического ожидания. Минимальное математическое ожидание отклонения гнезд М = 0,054 м наблюдается при скорости 1,5 м/с, а максимальное М = 0,218 м – при скорости 3,0 м/с. Среднеквадратическое отклонение на всех ступенях варьирования скорости сеялки одинаково и находится в пределах Ϭ = 0,030–0,033 м.
При значении скорости сеялки до 2,0 м/с значения выборок отклонений сильно вариабельны, при скорости выше 2,0 м/с – средневариабельны. Так, наибольшее варьирование отклонений гнезд V = 61,2 % наблюдается при скорости 1,5 м/с, наименьшее V = 15,0 % – при скорости 3,0 м/с. Несмотря на то, что с увеличением скорости коэффицент вариации V уменьшается, посев рациональнее проводить на меньших скоростях, так как в таком случае наименьшее максимальное значение отклонения гнезд наблюдается при скорости 1,5 м/с.
Т а б л и ц а
T a b l e
Статистические показатели неравномерности распределения гнезд семян относительно заданного положения
Statistical indicators of the irregurality of distributing seed clusters regarding a given position
|
Средняя скорость v с, м/с / Mean speed v с, m/s |
Минимальное отклонение, м, / Minimum deviation, m |
Максимальное отклонение, м / Maximum deviation, m |
Математическое ожидание М , м / Mathematical expectation М , m |
Среднеквадратическое отклонение Ϭ , м / Integrated squared deviation Ϭ , m |
Коэффициент вариации V , % / Coefficient of variation V , % |
|
1,5 |
–0,018 |
0,151 |
0,054 |
0,033 |
61,2 |
|
2,0 |
0,017 |
0,169 |
0,114 |
0,030 |
26,5 |
|
2,5 |
0,078 |
0,243 |
0,166 |
0,032 |
19,3 |
|
3,0 |
0,119 |
0,310 |
0,218 |
0,032 |
15,0 |
Отклонение гнезд семян, м / The change in the seed cluster dimension,
Номер гнезда с семенами в борозде / The number of the cluster with seeds in the furrow
a)
b)
Номер гнезда с семенами в борозде / The number of the cluster with seeds in the furrow
c)
Номер гнезда с семенами в борозде / The number of the cluster with seeds in the furrow
d)
Р и с. 10. График неравномерности распределения гнезд семян в борозде после сброса при различных скоростях посева: a) v = 1,5 м/с; b) v = 2,0 м/с; c) v = 2,5 м/с; d) v = 3,0 м/с
F i g. 10. The graph of the uneven distribution of seed clusters in the furrow after discharge at variable sowing speeds: a) v = 1.5 m/s; b) v = 2.0 m/s; c) v = 2.5 m/s; d) v = 3.0 m/s
Обсуждение и заключение
В результате данного исследования в программной среде Simulink Matlab построена имитационная модель квадратно-гнездового посева на базе алгоритма управления исполнительными механизмами посевных секций сеялки с описанием основных этапов ее формирования. Отличительной особенностью рассмотренного способа посева является использование сигналов спутниковых систем геопозиционирования только для определения границ поля как координатных линий отсчета расстояний. Для локального координирования пройденного расстояния предложено измерительное устройство в виде путеизмерительного колеса с инкрементальным энкодером.
Анализ модели проводился при различных значениях переменной скорости сеялки и параметрах посева, в частности варьировались шаг посева и позиция первого открытия заслонок исполнительных механизмов.
Выявлена необходимость в применении предварительной настройки энкодера. В ходе теоретических исследований определены зависимости оптимального числа импульсов на один оборот вала энкодера от заданного шага посева и радиуса колеса. Предложены зависимости для определения отклонений гнезд семян от позиций, заданных шагом посева. На основе полученных выражений разработана программа для подбора оптимальных значений количества импульсов на один оборот вала энкодера перед началом посева.
В результате численных экспериментов определено, что величина мак-
симального отклонения последнего гнезда семян не превышает 2,7 мм на 1 000 м (при x = 0,3 м и t = 0,7 м) при различных вариантах позиции начального открытия заслонок, что незначительно, по сравнению с агротехническими показателями, и достаточно для проведения квадратно-гнездового посева.
Установлено, что точность распределения гнезд семян на поле определяется в большей степени скоростью сеялки, чем настройками измерительного устройства, так как отклонение гнезд семян под влиянием скорости посевного агрегата ( х = 0,078 ‒ 0,243 м при v = 2,5 м/с) на порядок превышает отклонения (Δ L = 2,7 ∙ 10–3 м при x = 0,3 м, v = 2,5 м/с), определяемые настройками энкодера путеизмерительного колеса и алгоритмом управления. Поэтому возникает необходимость в снижении скорости сеялки для уменьшения разброса семян в борозде. Но это ведет к нивелированию достоинств квадратно-гнездового размещения семян и необходимости поиска способа повышения качества работы заделывающих органов сеялки для снижения разброса и фиксации семян в борозде на высоких скоростях посева.
Таким образом, анализ имитационной модели квадратно-гнездового посева показал, что алгоритм управления исполнительными механизмами вместе с системой локального координирования посевного агрегата и программой предварительной настройки энкодера работает адекватно и обеспечивает высокую точность распределения гнезд семян на поле по углам квадрата.
Technologies and means of agricultural mechanization 547
Поступила 10.07.2020; принята к публикации 20.08.2020; опубликована онлайн 30.12.2020
Об авторе:
Автор прочитал и одобрил окончательный вариант рукописи.
Список литературы Моделирование квадратно-гнездового посева
- Мухин, В. А. Влияние способов посева зерновых колосовых культур на площадь питания растений / В. А. Мухин, А. А. Кромм, С. Г. Щукин // Сибирский вестник сельскохозяйственной науки. - 2005. - № 6. - С. 71-78. - Рез. англ.
- Василенко, В. В. Распределение семян и растений сахарной свеклы при пунктирном высеве / В. В. Василенко, С. В. Василенко // Техника в сельском хозяйстве. - 1999. - № 1. - С. 6-9.
- Технология внесения пестицидов и удобрений беспилотными летательными аппаратами в цифровом сельском хозяйстве / Л. А. Марченко, А. А. Артюшин, И. Г. Смирнов [и др.]. - DOI 10.22314/20737599-2019-13-5-38-45 // Сельскохозяйственные машины и технологии. - 2019. - Т. 13, № 5. - С. 38-45. -URL: https://www.vimsmit.com/jour/article/view/355 (дата обращения: 12.10.2020).
- Личман, Г. И. Космический мониторинг в системе точного земледелия / Г. И. Личман, Н. М. Марченко // Сельскохозяйственные машины и технологии. - 2010. - № 1. - С. 27-31.
- Патент № 167927 Российская Федерация, МПК A01C 7/08 (2006.01). Система контроля и управления посевным комплексом : № 2015147700 : заявл. 06.11.2015 : опубл. 12.01.2017 / Скрын-ник Б. С. ; патентообладатель ООО «Центр точного земледелия Аэросоюз». - URL: https://new.fips. ru/registers-doc-view/fips_servlet?DB=RUPM&DocNumber=167927&TypeFile=html (дата обращения: 12.10.2020).
- Navigation Algorithm Based on the Boundary Line of Tillage Soil Combined with Guided Filtering and Improved Anti-Noise Morphology / W. Lu, M. Zeng, L. Wang [et al.]. - DOI 10.3390/s19183918 // Sensors. - 2019. - Vol. 19, Issue 18. - Pp. 3918. - URL: https://www.mdpi.com/1424-8220/19/18/3918 (дата обращения: 12.10.2020).
- Mitterer, T. Artificial Landmarks for Trusted Localization of Autonomous Vehicles Based on Magnetic Sensors / T. Mitterer, H. Gietler, L.-M. Faller [et al.]. - DOI 10.3390/s19040813 // Sensors. - 2019. - Vol. 19, Issue 4. - Pp. 813. - URL: https://www.mdpi.com/1424-8220/19/4/813 (дата обращения: 12.10.2020).
- Li, Y. 3D Autonomous Navigation Line Extraction for Field Roads Based on Binocular Vision / Y. Li, X. Wang, D. Liu. - DOI 10.1155/2019/6832109 // Journal of Sensors. - 2019. - Vol. 2019, Article ID 6832109. -16 p. - URL: https://www.hindawi.com/journals/js/2019/6832109/ (дата обращения: 12.10.2020).
- Application of a 3D Tractor-Driving Simulator for Slip Estimation-Based Path-Tracking Control of Auto-Guided Tillage Operation / X. Han, H.-J. Kim, Ch. W. Jeon [et al.]. - DOI 10.1016/j.biosystem-seng.2018.11.003 // Biosystems Engineering. - 2019. - Vol. 178. - Pp. 70-85. - URL: https://www.science-direct.com/science/article/pii/S1537511017309005?via%3Dihub#! (дата обращения: 12.10.2020).
- LiDAR-Only Based Navigation Algorithm for an Autonomous Agricultural Robot / F. B. P. Mala-vazi, R. Guyonneau, J.-B. Fasquel [et al.]. - DOI 10.1016/j.compag.2018.08.034 // Computers and Electronics in Agriculture. - 2018. - Vol. 154. - Pp. 71-79. - URL: https://www.sciencedirect.com/science/ article/pii/S0168169918302679?via%3Dihub (дата обращения: 12.10.2020).
- Curved and Straight Crop Row Detection by Accumulation of Green Pixels from Images in Maize Fields / I. Garcia-Santillan, J. M. Guerrero, M. Montalvo, G. Pajares. - DOI 10.1007/s11119-016-9494-1 // Precision Agriculture. - 2018. - Vol. 19. - Pp. 18-41. - URL: https://link.springer.com/article/10.1007/ s11119-016-9494-1 (дата обращения: 12.10.2020).
- Combining Computer Vision and Deep Learning to Enable Ultra-Scale Aerial Phenotyping and Precision Agriculture: A Case Study of Lettuce Production / A. Bauer, A. G. Bostrom, J. Ball [et al.]. - DOI 10.1038/s41438-019-0151-5 // Horticulture Research. - 2019. - Vol. 6, Article ID 70. - URL: https://www. nature.com/articles/s41438-019-0151-5 (дата обращения: 12.10.2020).
- Unmanned Aerial Vehicle Remote Sensing for Field-Based Crop Phenotyping: Current Status and Perspectives / G. Yang, J. Liu, C. Zhao [et al.]. - DOI 10.3389/fpls.2017.01111 // Frontiers in Plant Science. - 2017. - Vol. 8. - URL: https://www.frontiersin.org/articles/10.3389/fpls.2017.01111/full (дата обращения: 12.10.2020).
- Robot Navigation in Orchards with Localization Based on Particle Filter and Kalman Filter / P. M. Blok, K. Boheemen, F. K. Evert [et al.]. - DOI 10.1016/j.compag.2018.12.046 // Computers and Electronics in Agriculture. - 2019. - Vol. 157. - Pp. 261-269. - URL: https://www.sciencedirect.com/sci-ence/article/pii/S0168169918315230?via%3Dihub (дата обращения: 12.10.2020).
- Fernandez, B. A Simplified Optimal Path Following Controller for an Agricultural Skid-Steering Robot / B. Fernandez, P. J. Herrera, J. A. Cerrada. - DOI 10.1109/ACCESS.2019.2929022 // IEEE Access. -2019. - Vol. 7. - URL: https://ieeexplore.ieee.org/document/8763950 (дата обращения: 12.10.2020).
- Патент № 127497 СССР, МПК A01C 7/18 (2000.01), A01B 69/00 (2000.01). Способ ультразвукового управления сеялками при квадратно-гнездовом посеве : № 625573 : заявл. 16.04.1959 : опубл. 01.01.1960 / Кобаков О. С., Костин Ю. П., Шварцман Л. М. ; патентообладатель Суханова М. В. - 2 с. - URL: https://new.fips.ru/registers-doc-view/fips_servlet?DB=RUPAT&DocNumber=127 497&TypeFile=html (дата обращения: 12.10.2020).
- Патент № 843811 СССР, МПК А01 С7/04. Способ посева семян кукурузы : № 2752031 : заявл. 12.04.1979 : опубл. 07.07.1981 / Прокопов О. И., Зиязетдинов Р. Ф. ; заявитель и патентообладатель Башкирский сельскохозяйственный институт. - 4 с. - URL: https://new.fips.ru/registers-doc-view/fips_servlet?DB=RUPAT&DocNumber=843811&TypeFüe=html (дата обращения: 12.10.2020).
- Патент № 106630 СССР, МПК A01C 7/18 (2000.01). Устройство для высева сельскохозяйственных культур по квадратно-гнездовому способу : № 454858 : заявл. 13.03.1956 : опубл. 07.07.1957 / Балановский П. А., Домонтович М. В. ; заявитель и патентообладатель Баланов-ский П. А., Домонтович М. В. - 4 с. - URL: https://new.fips.ru/registers-doc-view/fips_servlet?DB=RU PAT&DocNumber=106630&TypeFile=html (дата обращения: 12.10.2020).
- Лобачевский, П. Я. Закономерности подачи технологического материала дискретными дозаторами / П. Я. Лобачевский // Вестник российской сельскохозяйственной науки. - 1999. - № 6. - С. 33-35.
- Патент № 2363131 Российская Федерация, МПК A01C 7/18 (2006.01). Квадратно-гнездовая сеялка : № 2008113792/12 : заявл. 08.04.2008 : опубл. 10.08.2009 / Лобачевский П. Я., Попов А. Ю., Несмиян А. Ю. [и др.] ; патентообладатель ФГОУ ВПО АЧГАА. - 7 с. - URL: https:// www.fips.ru/registers-doc-view/fips_servlet?DB=RUPAT&DocNumber=2363131&TypeFile=html (дата обращения: 12.10.2020).
- Патент № 2369069 Российская Федерация, МПК A01C7/18. Квадратно-гнездовой способ посева : № 2008120457 : заявл. 22.05.2008 : опубл. 10.10.2009 / Лобачевский П. Я., Попов А. Ю., Несмиян А. Ю. [и др.] ; патентообладатель ФГОУ ВПО АЧГАА. - 5 с. - URL: https://www.fips.ru/registers-doc-view/fips_servlet?DB=RUPAT&DocNumber=2369069&TypeFile=html (дата обращения: 12.10.2020).
- Зубрилина, Е. М. Распределение семян двух культур в рядке при совместном высеве / Е. М. Зубрилина // Механизация и электрификация сельского хозяйства. - 2002. - № 7. - С. 13-15.
