Моделирование мартенситных превращений в сталях: кинематика мезоуровня

Автор: Няшина Н.Д., Трусов П.В.
Статья в выпуске: 4, 2014 года.
Бесплатный доступ
Рассматривается вывод кинематических соотношений, описывающих мартенситные переходы в сталях. Мартенситные переходы относятся к бездиффузионным твердотельным фазовым переходам, происходят со скоростями, близкими к скорости звука, и приводят к изменению типа решетки металла. Поэтому при описании кинематики мартенситного перехода необходимо учесть, с одной стороны, основные физические явления: перестройку решетки, аккомодацию остаточных напряжений, возникших вследствие этой перестройки, а с другой - наличие инвариантной (габитусной) плоскости, делающей возможным переход при столь высоких скоростях. Предлагаемая работа представляет одну из важных составляющих (подмодель) разрабатываемой двухуровневой математической модели твердотельных фазовых превращений при термомеханической обработке сталей. Модель основывается на подходах физической теории пластичности, позволяющей учитывать физические механизмы деформирования за счет введения дополнительных внутренних переменных на различных масштабных уровнях. Приводится вывод соотношений для градиента трансформационной деформации представительного объема мезоуровня как деформации с инвариантной плоскостью. По аналогии с пластической деформацией трансформационная задается соответствующей системой векторов - вектором нормали к инвариантной плоскости и вектором направления скольжения (эти векторы не перпендикулярны). Указанные векторы не определяются полностью только кристаллографией, как их аналоги в теории пластического сдвига по плоскостям скольжения. Они вычисляются с учетом величины изменения параметров решетки при фазовом переходе, аккомодационных механизмов, его сопровождающих. Приводятся результаты вычисления трансформационных систем, получаемых при аккомодации остаточных напряжений пластическими сдвигами и двойникованием по различным возможным системам в мартенсите. По рассчитанным трансформационным системам строятся градиенты деформации для мартенситного перехода в стали и их геометрическая интерпретация. Вычисленные собственные числа градиентов дают представление об изменении объема при мартенситном превращении. Полученные результаты расчета сравниваются с известными экспериментальными и теоретическими данными.
Мартенситные переходы, двухуровневая модель, физические теории пластичности, математическое моделирование
Короткий адрес: https://sciup.org/146211534
IDR: 146211534 | УДК: 539.3 | DOI: 10.15593/perm.mech/2014.4.05
Modelling of martensitic transformations in steels: kinematics of the meso-level
The derivation of the kinematic relations for the martensitic transformations in steels is considered. Martensitic transformations are diffusion-less solid-state phase ones, occur at speeds close to the sonic speed and lead to changes in the type of the metal lattice. Therefore, when describing the kinematics of the martensitic transition, on the one hand, we are to take into account the basic physical phenomena such as restructuring lattice, accommodation of residual stresses caused by the restructuring; and on the other hand, - the existence of invariant (habitus) plane, making the transition possible at such high speeds. The derived kinematic relations are the part of a two-level mathematical model of solid-state phase transformations during thermomechanical processing of steels. The model is based on physical approaches of the theory of plasticity, allowing taking into account the physical mechanisms of deformation due to introduction of additional internal variables at the mesolevel. The derivation of the relations for the gradient of transformation deformation of mesolevel representative volume as a deformation with an invariant plane is presented. Analogues to the plastic deformation, the transformation deformation is given by a corresponding system of vectors, i.e. the vector normal to the invariant plane and the vector of the sliding direction (these vectors are not mutually perpendicular). These vectors are not known from crystallography, as their analogues in the theory of plastic shear on slip planes. They are calculated taking into account the magnitude of the changes in the lattice parameters at the phase transition and accommodative mechanisms. The results of calculation of transformation systems resulting due to accommodation of residual stresses by plastic shears and twinning on various possible systems in the martensite are given. After calculating transformation systems, gradients of deformation for the martensitic transition in steel and their geometric interpretation are made. The found eigenvalues of gradients give an insight into the volume change at the martensitic transformation. The results are compared with the available experimental and theoretical data.
Текст научной статьи Моделирование мартенситных превращений в сталях: кинематика мезоуровня
Термомеханическая обработка стали широко применяется в промышленности для придания металлическим деталям и конструкциям требуемых физико-механических свойств. В процессе обработки сталь испытывает ряд диффузионных и недиффузионных полиморфных превращений. В результате бездиффузионного (мартенситного) перехода происходит перестройка решетки из гранецентрированной кубической (ГЦК) в объемноцентрированную тетрагональную (ОЦТ), что приводит к существенным искажениям среды в окрестности образовавшейся новой фазы. Появившиеся при этом остаточные напряжения 2-го рода релаксируют посредством пластической деформации. Основной осо- бенностью мартенситных превращений является высокая скорость образования новой фазы, сопоставимая со скоростью звука. Протекание фазового перехода с такой скоростью объясняется наличием инвариантной плоскости сопряжения фаз – габитусной плоскости, в которой материальные прямые не искажаются и не поворачиваются [1–7].
При мартенситном переходе происходят физические процессы, относящиеся к различным масштабным уровням: перестройка решетки – процесс на уровне кристаллической решетки (рис. 1), образование и рост пластинок мартенсита в родительской фазе аустенита происходит на микроуровне I, пластическая аккомодация остаточных напряжений 2-го рода, – процесс микроуровня II. Кроме того, изменение механических свойств при появлении мартенситной фазы оказывает влияние на поведение материала на уровне представительного макрообъема и реакции конструкции в целом. В связи с этим описание процесса мартенситного фазового перехода следует рассматривать на нескольких масштабных уровнях [8]. Рассматриваемая в настоящей статье подмодель является составной частью двухуровневой математической модели твердотельных фазовых переходов в сталях при термомеханической обработке, описывающей фазовые переходы на макро- и мезоуровнях.
Существующие модели, описывающие деформирование металлов с полиморфными превращениями, можно условно разделить на два вида. Во-первых, модели, основанные на явном рассмотрении границы раздела фаз, термодинамических условий на этой границе и кинетики новой фазы. Во-вторых, модели с введением некоторых дополнительных, внутренних, переменных, относящихся к более низким масштабным уровням и описывающих физические закономерности эволюции новой фазы. Краткий обзор публикаций по моделям содержится в [9]. Предлагаемая работа базируется на применении второго подхода и использует методологию построения многоуровневых моделей, включающих в рассмотрение физические механизмы, определяющие процессы полиморфного превращения и пластического деформирования [10–12]. Модель мезоуровня включает в себя конститутивные соотношения физической теории пластичности с учетом фазовых превращений, критерии полиморфного превращения, эволюционные уравнения для доли фаз и кинематические соотношения для меры деформации [8, 10–14]:
о r = о - to • о + о • го = c:de = c: (d - din), din = d p + d tr + d th, кинематические соотношения для мер неупругого деформирования d p ,d tr ,d th, критерий мартенситного перехода, эволюционные уравнения для доли фаз, соотношения для определения спина решетки го, d = D.
Здесь о - тензор напряжения Коши; го - тензор спина решетки, описывающий движение подвижной кристаллографической системы координат; d in - неупругая составляющая деформации скорости; d p , d tr , d th -пластическая, трансформационная и термическая составляющая тензора неупругой деформации скорости; c - тензор упругих свойств кристаллита; все эти величины (обозначаются малыми буквами) относятся к мезоуровню. Величины c , d in , го - явные внутренние переменные мезоуровня.
Полученные поля мезоуровня, посредством процедуры согласования [9, 13] передаются на макроуровень и включаются в решение макрозадачи:
L r = L + Q T • L + L • Q = C:D e = C: ( D - D in ),
Q = Q (ro(/,), i = 1,..., N ,
C = C ( c0. ) , O ( i ) ), i = 1,..., N ,
D in = D in ( d in , c ( i ) ), i = 1,..., N .
Здесь 2 - тензор напряжения Коши; Q - тензор спина, описывающий движение подвижной системы координат; D in - неупругая составляющая деформации скорости; C - тензор эффективных упругих свойств представительного макрообъема, все эти величины (обозначаются заглавными буквами) относятся к макроуровню; О • о T = го . Величины С ( i ) , d in ( i ) , ГО ( i ) - неявные внутренние переменные макроуровня.
В предлагаемой статье рассматривается построение кинематических соотношений для деформаций представительного объема мезоуровня, вызванных мартенситным переходом.
Поскольку точные траектории движения атомов при мартенситном переходе неизвестны, то есть неизвестны трансформационные системы, в отличие от известных в теории пластичности систем скольжения и двойникования , то существующие подходы к описанию кинематики мартенситного превращении, в частности построение меры деформации, сводятся к описанию известных экспериментальных данных в рамках гипотезы о деформировании с инвариантной плоскостью и позволяют получить осредненные значения градиента трансформационной деформации представительного объема мезоуровня с учетом физических механизмов более низких масштабных уровней. В [1] приведена классификация кристаллографических теорий мартенситного превращения для различных типов металлических сплавов. В предлагаемой работе рассматривается наиболее распространенный подход к построению меры деформирования для углеродистых сталей.
Приводится вывод соотношений для векторов, задающих трансформационную систему, по которым строится градиент деформации для элементарного объема мезоуровня (кристаллита), в родительской фазе аустенита которого появляется мартенситная фаза. Общая деформация учитывает возможность одновременного протекания упругих и пластических деформаций.
В рамках построения двухуровневой модели упруговязкопла-стичности рассматривается деформирование поликристаллического агрегата стали, испытывающего упругопластические деформации и мартенситные превращения. Элемент верхнего масштабного уровня является представительным объемом макроуровня, для которого напряженно-деформированное состояние и материальные параметры считаются однородными и определяются с помощью процедуры согласования определяющих соотношений различных уровней [13]. В качестве элемента мезоуровня выбираются области, для которых однородными являются поля мер НДС и свойств, определенные на этом масштабом уровне (т.е. однородными считаются поля материальных характеристик, мезонапряжений и мезодеформаций). Для поликри-сталлических материалов в качестве элементов мезоуровня выбирают кристаллиты (зерна, субзерна, фрагменты) приблизительно правильного кристаллического строения, с характерной анизотропией свойств и известными системами сдвига, двойникования [14] и рассчитанными трансформационными системами, определяющими кинематику мартенситного перехода, о которых пойдет речь ниже.
При мартенситном фазовом переходе имеют место физические процессы, затрагивающие и более низкие масштабные уровни. Схемы масштабных уровней и соответствующие им механизмы мартенситного перехода приведены на рис. 1. Непосредственное изменение типа решетки из ГЦК в ОЦТ происходит, соответственно, на уровне кристаллической решетки. Возникающие при этом микронаряжения в окружающей родительской фазе аустенита релаксируют посредством дислокационного скольжения и двойникования. Эти механизмы релаксации относятся к микроуровню II. Размеры, форма мартенситных пластинок, их взаимодействие описываются на еще более высоком масштабном уровне – микроуровне I. Процессы, протекающие на этих уровнях, оказывают влияние на деформации мезоуровня и учитываются при построении осредненного градиента деформации (процессы и механизмы рассматриваемых масштабных уровней подробно будут описаны ниже).
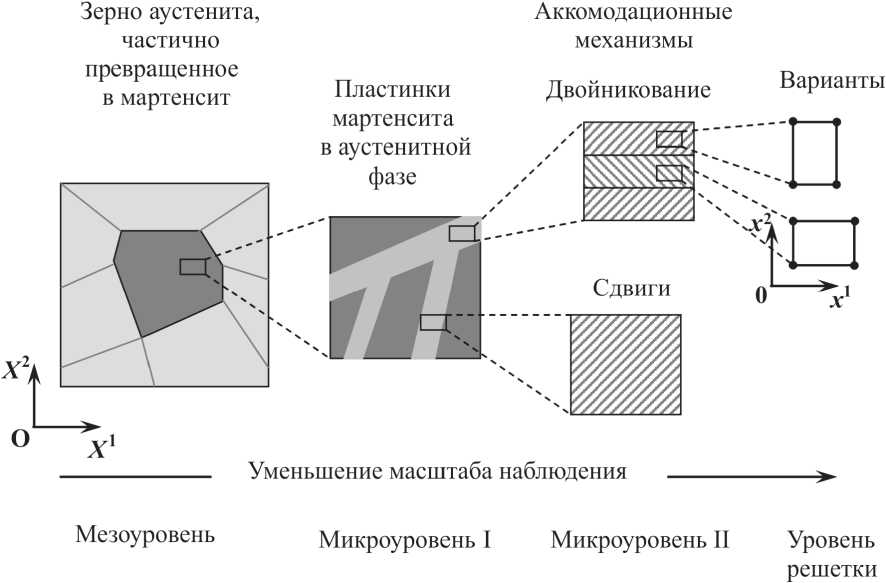
Рис. 1. Мартенситные субструктуры на нескольких иерархических масштабах наблюдения [15]
Однако подробное описание механизмов всех масштабных уровней на данном этапе не представляется возможным в силу сложности идентификации их параметров. Кроме того, неизвестны точные траектории движения частиц при мартенситном переходе, поэтому описание кинематики ограничим рассмотрением мезоуровня и будем предпола- гать, что при термомеханическом воздействии в кристаллите зарождается мартенситная фаза, границы раздела фаз не рассматриваются, считается, что образующаяся мартенситная фаза однородно распределена в представительном объеме мезоуровня. Кристаллит (элемент мезоуровня) по-прежнему считается однородным с эффективными (осред-ненными) свойствами, которые зависят от количества и свойств новой фазы. Мера деформации мезоуровня строится в рамках гипотезы о деформировании с инвариантной плоскостью.
Введем две системы координат: КСК - кристаллографическая система координат (декартова) ox 1 x 2 x 3 с ортонормированным базисом k i , жестко связанная с кристаллографическими направлениями в кубическом кристалле аустенита ox 1 = [100], ox 2 = [010], ox 3 = [001]; ЛСК -(декартова) лабораторная система координат OX1Х 2 X 3 с ортонормированным базисом l i .
Рассмотрим описание деформирования представительного объема мезоуровня на основе мультипликативного разложения градиента места (рис. 2): f = f e • f tr • f p , где тензор f p описывает пластическое деформирование, определяется сдвигами по кристаллографическим системам и переводит отсчетную конфигурацию в промежуточную 1 (без фазовых переходов), тензор f tr описывает деформирование, связанное с мартенситным переходом и переводит промежуточную конфигурацию 1 в промежуточную 2 (разгруженную), тензор f e описывает малые упругие деформации и квазижесткие повороты и переводит промежуточную конфигурацию 2 в актуальную.
Отметим, что градиент деформации - линейный оператор аффинного (с точностью до малых первого порядка) преобразования малой окрестности частицы среды из отсчетной конфигурации, заданной радиусом-вектором d R , в актуальную конфигурацию, описываемую радиусом-вектором d r : d r = f • d R [16].
Тогда градиент скорости перемещений имеет вид l = f • f -1 = (f e • f tr • f p + f e • f tr • f p + f e • f tr • f p ) • (f e • f tr • f p )-1 = = f e • f tr • f p • (f p )-1 • (f tr)-1 • f e-1 + f e • f tr • f p • (f p )-1 • (f tr)-1 • f e-1 + +f e • f tr • f p • (f p )-1 • (f tr )-1 • f e-1 = f e • f e-1 + f e • f tr • (f tr)-1 • f e-1 + + f e • f tr • f p • (f p )-1 • (f tr)-1 • f e-1.
Обозначим составляющие градиента скорости перемещений: - упругая составляющая в текущей конфигурации
• — 1
-
1 e = f e - f e ;
- трансформационная составляющая в текущей конфигурации:
1tr = f e - f tr - (f tr)—1- f e—1 = 1 tr = f e -1 tr* - f e—1, где 1 tr* - трансформационная составляющая в промежуточной (разгруженной) конфигурации 2 (см. рис. 2);
- пластическая составляющая в текущей конфигурации
1 p = f e - f tr - f p - (f p )-1 - (f tr)-1 - f e—1 = f e - f tr - f p - (f p )-1 - (f tr)-1 - f e—1 = = f e -1 p* - f e—1 = f e - f tr -1 p** - (f tr)—1 - f e-\ где 1 p* - пластическая составляющая в промежуточной (разгруженной) конфигурации - 2; 1 p** - пластическая составляющая в промежуточной (без фазовых превращений) конфигурации - 1.
Таким образом, градиент скорости перемещений в текущей конфигурации имеет вид
V v T = 1 = 1 e + 1 tr + 1 p .
Пластическая составляющая градиента скорости перемещений в промежуточной конфигурации 1 определяется сдвигами по системам скольжения в виде
Nα
’** = f p - ( f p ) — 1 = x Ya b ( a ) n ( a ) ,
α где Ya - скорость сдвига по системе скольжения а, заданной единичными взаимно перпендикулярными векторами в отсчетной конфигурации; b(а), n(а) - направления скольжения и нормали к плоскости скольжения соответственно.
Трансформационная составляющая градиента скорости перемещений из промежуточной конфигурации 1 в разгруженную промежуточную 2 требует более подробного описания, поскольку точные смещения атомов при перестройке решетки из ГЦК в ОЦТ неизвестны и все известные подходы определения градиента трансформационной составляющей деформации являются приближенными, описательными.
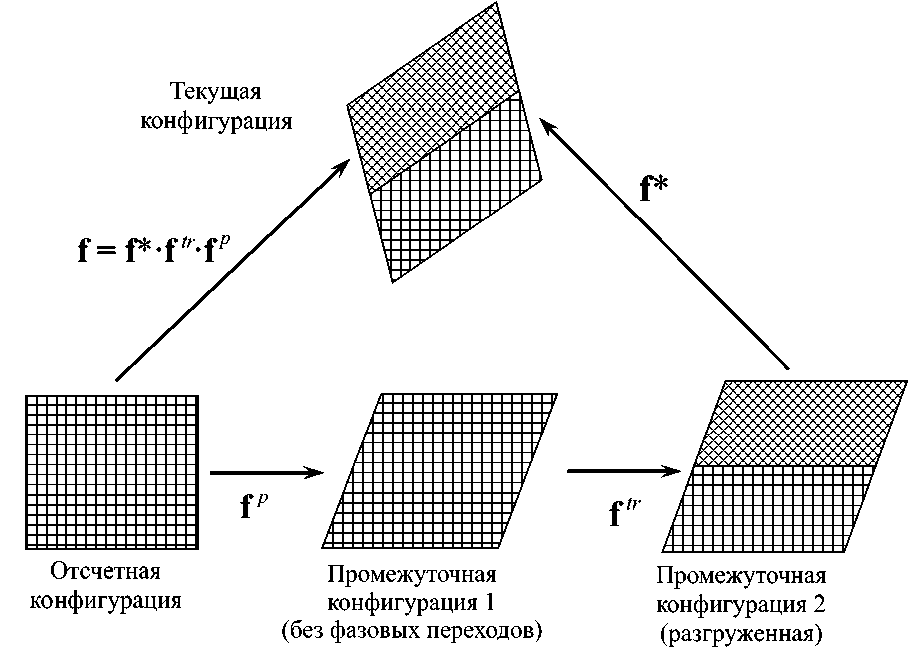
Рис. 2. Схематичное изображение разложения градиента деформации
Прежде чем перейти к математическому описанию градиента трансформационной деформации, остановимся на некоторых экспериментально известных фактах.
Во-первых, с точки зрения феноменологической теории мартенситных превращений при мартенситном переходе на уровне решетки происходит изменение типа решетки, которое можно описать с помощью деформации Бейна.
Согласно теории Бейна при перестройке решетки предполагается минимальность перемещений атомов.
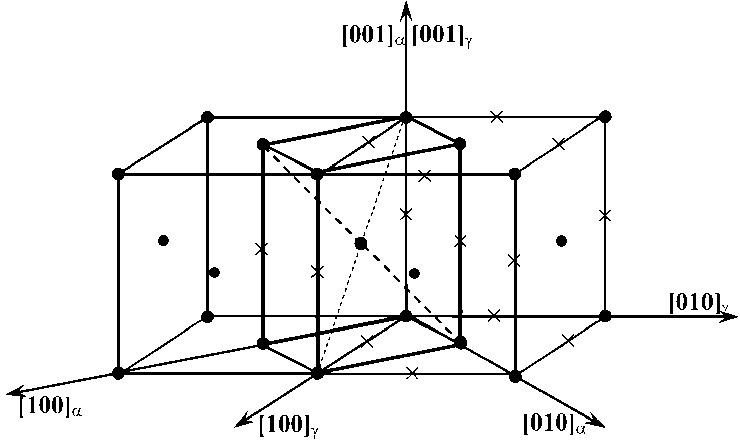
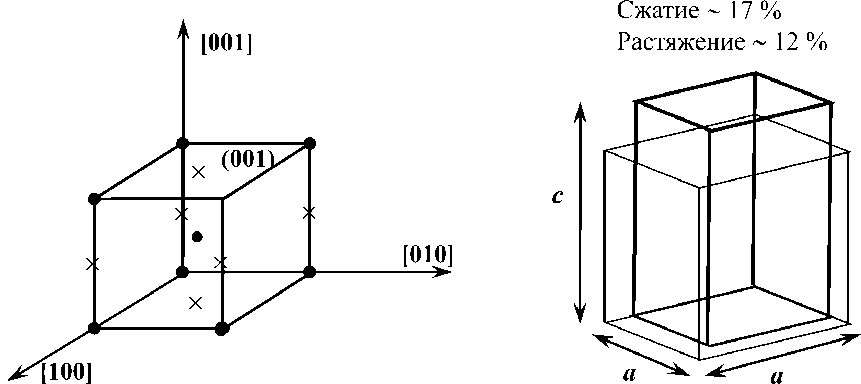
На рис. 3, а показаны две соседние элементарные ячейки ГЦК-решетки аустенита. В решетке аустенита можно выделить ячейку ОЦТ-решетки (см. рис. 3, а , выделено жирной линией). Однако в такой ячейке отношение периодов c / a = V2", а согласно экспериментальным данным у решетки мартенсита это отношение (с/а) < 1,09. Тогда деформация Бейна, описывающая превращение ГЦК-решетки аустенита в ОЦТ-решетку мартенсита, заключается в сжатии выделенной тетрагональной ячейки аустенита вдоль ее оси с и одновременном увеличении размеров вдоль осей а (параметр решетки а для ОЦТ, формально выделенной из ГЦК, и ОЦТ реальной решетки мартенсита отличаются, как показано на рис. 3, в ) [18].
a
б
в
Рис. 3. Геометрическая интерпретация деформации Бейна: а - формально выделенная ячейка ОЦТ-решетки (жирная линия) в ГЦК-решетке аустенита; б - реальная ячейка ОЦТ-решетки мартенсита; в - деформация Бейна, превращающая формально выделенную в аустените ячейку ОЦТ-решетки (жирная линия) в реальную ячейку ОЦТ-решетки мартенсита [17]
Деформация Бейна может быть выражена одним из тензоров В 1 , В 2 или В 3, компоненты которых в базисе КСК решетки аустенита имеют вид
[ 5 1 ] =
П
0 0
П 1 0 0 П 1
[ В 2 ] = 0
П 2 0
, [ В 3 ] =
П1J
П =
2aa а 0
a
П = — a 0
П
0 0
П 1 0
0 П
Однако деформации Бейна недостаточно, чтобы описать деформирование при мартенситном превращении, поскольку деформация Бейна нарушает когерентность границы раздела фаз.
Во-вторых, существуют установленные рентгенографическим способом ориентационные соотношения решеток исходной аустенитной и мартенситной фаз (на микроуровне I) [2].
Ориентационное соотношение Курдюмова-Закса (пример -углеродистые стали с 0,6 - 1,4% С):
{111}yI (101) а (110) y|| О11) а
Подобная взаимная ориентация решеток объясняется наибольшей близостью по строению плоскостей плотнейшей упаковки {111} в ГЦК и {110} в ОЦТ, а также направлений плотнейшей упаковки <110> в ГЦК-решетке и <111> в ОЦТ.
Так как в ГЦК-решетке аустенита имеется четыре кристаллографически эквивалентных плоскости типа {111} и шесть кристаллографически эквивалентных направлений типа <110>, то относительно одного положения кристалла аустенита возможны 24 ориентации кристаллов мартенсита, удовлетворяющие соотношению Курдюмова - Закса.
Ориентационное соотношение Нишиямы (пример - сплавы железа с 27-34 % Ni):
O^yI {101} а (121),|| Л01) а
Соотношение Гренингера-Трояно (пример - сплав Fe - 22 % Ni - 0,8 %С):
O^yI {101} а <110) yII (101) а
Отметим, что точные ориентационные соотношения не известны. Поскольку указанные соотношения получены рентгенографическим методом на тонких пленках, по толщине - в несколько зерен, они отражают некоторую осредненную картину, поэтому эти соотношения являются, по-видимому, лишь экспериментально полученными приближенными соотношениями иррациональных соотношений, имеющих место в реальности [1].
Деформация Бейна одна не может привести к 24 ориентациям Курдюмова - Закса, так как ребра элементарной ячейки мартенсита ос- таются параллельными ребрам исходной тетрагональной ячейки аустенита. Необходимы более сложные траектории движения атомов.
Формально все экспериментально обнаруженные ориентационные соотношения решеток аустенита и мартенсита можно получить, дополнив деформацию Бейна поворотом решетки мартенсита, при котором становятся параллельными соответствующие плоскости и соответствующие направления в решетках исходной и мартенситной фаз. Однако деформация Бейна, дополненная жестким поворотом, не обеспечивают когерентность границ. Поэтому с формальной точки зрения необходима дополнительная деформация, сохраняющая новую решетку неизменной, которая бы обеспечивала когерентность границ.
В-третьих, экспериментально установлено, что при мартенситном превращении на плоской полированной поверхности образца появляется характерный рельеф. Подобный рельеф наблюдается по отношению к любой выбранной поверхности образца, поэтому можно сделать вывод о том, что при мартенситном превращении габитусная плоскость на уровне представительного макрообъема приблизительно инвариантна (не искажается и не вращается).
Таким образом, согласно феноменологической теории кристаллографии мартенситного перехода [19], в представительном объеме мезоуровня (в кристаллите) при мартенситном превращении появляются пластины мартенсита, окруженные аустенитной фазой, сопротивляющейся фазовому переходу, которая активирует аккомодационные механизмы в мартенсите. Поскольку непосредственная перестройка решетки и вызванная ей пластическая деформация, снижающая остаточные напряжения 2-го рода, происходят одновременно, и кроме того, граница раздела фаз не отслеживается, то общая (осредненная) деформация в этом объеме должна включать в себя все эти механизмы. Тогда градиент деформации мезообъема, в котором произошел мартенситный переход, можно представить в виде произведения [19-26]:
f tr = Q • B • f LIS , (5) где B - деформация Бейна; f LIS - деформация с инвариантной решеткой (аккомодационные механизмы за счет пластических сдвигов и двойникования); Q - некоторый собственно ортогональный тензор, задающий жесткий поворот, обеспечивающий существование инвариантной плоскости.
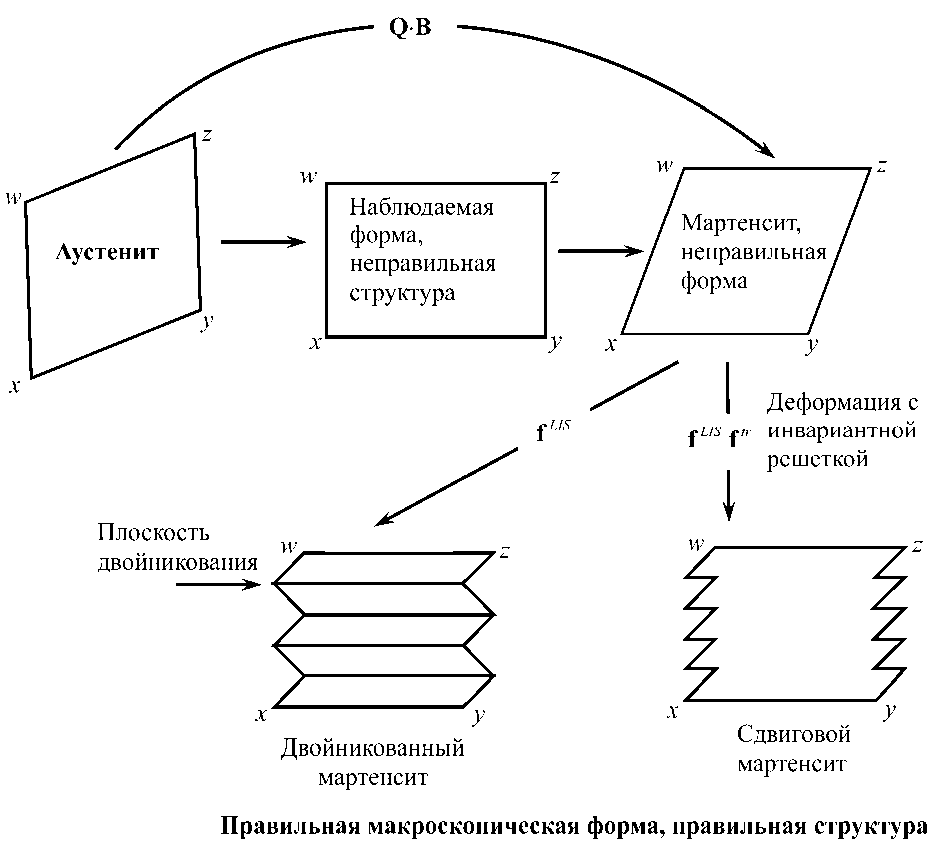
Рис. 4. Феноменологическая теория кристаллографии мартенситного перехода [19]
Итак, феноменологическая теория кристаллографии мартенситного перехода [19] (рис. 4) учитывает основные физические механизмы мартенситного перехода: деформация Бейна B элементарного объема аустенита преобразует исходную решетку в решетку мартенсита; вместе с подходящим поворотом как жесткого целого Q обеспечивает соответствие ориентационным соотношениям, но не наличие инвариантной плоскости. Появление новой фазы такой формы внутри родительской требует энергетических затрат, значительно больших, чем наблюдают экспериментально. Это несоответствие снимается, если существенное изменение формы нивелируется деформацией с инвариантной решеткой f LIS , которая может реализоваться пластическим деформированием - сдвигами и двойникованием. Кроме того, такая деформация обеспечит деформацию с инвариантной плоскостью.
Перейдем к непосредственному построению градиента деформации представительного объема мезоуровня, описывающей деформиро- вание с инвариантной плоскостью, в котором произошел мартенситный переход.
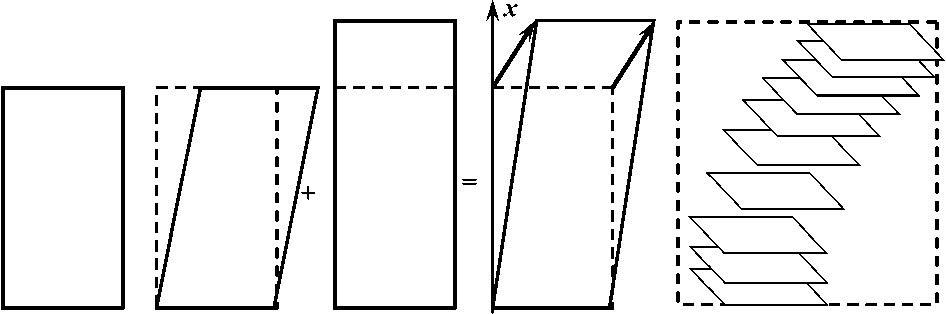
На рис. 5. приведена схема деформации с инвариантной плоскостью. Растяжение вдоль одной оси и простой сдвиг являются деформациями с инвариантной плоскостью, а значит, и их линейная комбинация также является деформацией с инвариантной плоскостью.
а б в г д
Рис. 5. Схема деформации с инвариантной плоскостью: а - исходная область; б - после деформации простым сдвигом; в - после растяжения; г - конечная форма области; д - семейство плоскостей, параллельных инвариантной плоскости (все точки (атомы) превращающегося объема смещаются в одном направлении; величина смещения пропорциональна расстоянию точки от инвариантной плоскости, которая при этом не искажается и не поворачивается) [1]
С математической точки зрения когерентность фаз на границе означает, что каждый вектор r e Г (где Г - габитусная плоскость), соединяющий две точки на межфазной плоскости до превращения, переходит в тот же самый вектор после превращения, независимо от того, какой фазе он принадлежит [20], т.е.
r = f tr • r , или ( f tr - 1) • r = 0 , V r еГ .
Поскольку для вектора нормали к инвариантной поверхности m • r = 0 , где r - вектор, соединяющий две точки на межфазной плоскости до превращения, тогда требование сохранения контакта (когерентности границы раздела фаз) удовлетворяется при выполнении условия (условия Адамара)
f tr - 1 = sm, V s .
Итак, f tr = I + sm. (6)
Градиент деформации в виде (6) описывает деформацию с инвариантной плоскостью: все плоскости с нормалью m не искажаются, так как смещение в каждой из плоскостей одинаковы (пропорциональны расстоянию от габитусной плоскости (см. рис. 5):
( sm ) • r = s ( m • r ) = s x, V r ef .
Как любой невырожденный тензор 2-го ранга, градиент деформации может быть представлен в виде произведения собственно ортогонального Q и симметричного тензоров:
f tr = Q • U .
Тензор U может быть записан в терминах главных значений и главных векторов, причем главные значения имеют смысл относительных удлинений материальных волокон, направленных вдоль собственных векторов тензора:
U = ^ e i e i .
Далее выразим компоненты векторов s и m в базисе собственных векторов тензора U через собственные числа тензора U .
Любой вектор, лежащий в инвариантной плоскости Г, должен сохранять величину после деформации:
|f tr • r| 2 = |r| 2, Vr еГ, тогда
|U• r| 2 = |r| 2 , V r еГ
(так как вращение Q не оказывает влияния на длину вектора). В компонентной форме в системе координат, образованной главными осями тензора U , последнее соотношение можно записать в виде
22 22 22 2 2 2
1x1 2x2 3x3 x1 x2 x3, где Xi - главные удлинения. Таким образом, направления, вдоль которых деформация не меняет длин векторов, лежат на конической поверхности, направляющая которой – линия пересечение сферы и эл- липсоида, вершина конуса находится в начале координат:
22 22 22
= 1,
1 x 1 2 x 2 3 x 3
Х 1 + x 2 + x 3 = 1.
Эта линия задается уравнением
22 22 22
11 -К ) Xi +11 — A2) x2 +11 — Кз ) xз — 0.
Если одно из собственных чисел равно 1 (отрицательное собственное число не рассматривается, поскольку соответствует «выворачиванию» конфигурации), например,
A2 — 1, A2 < 1, A2 > 1, то линия пересечения задается уравнением x1 V1 -A2— ± x 3 ^A 2 -1, или
- A 2 -1
x 1 — - Kx з =± x з ——T. (7)
1 -A 1
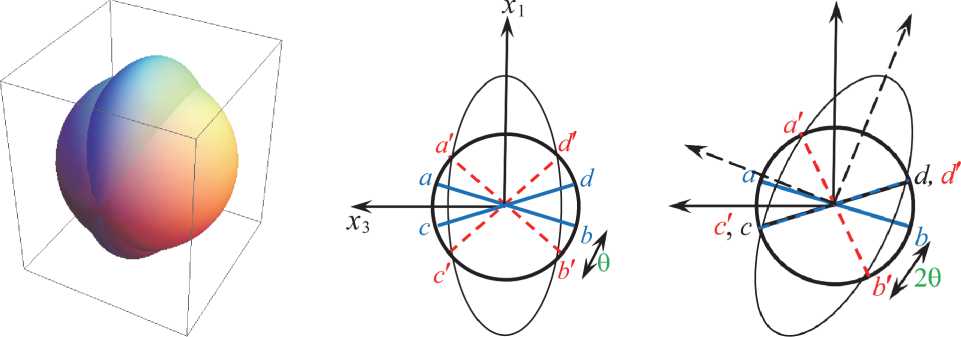
То есть коническая поверхность направлений, вдоль которых деформация не меняет длин векторов, вырождается в две пересекающиеся плоскости (рис. 6).
На рис. 6 схематически изображены инвариантные направления: под действием деформации U сфера превращается в эллипсоид; сфера и эллипсоид пересекаются по некоторой линии – окружности, которая является направляющей конической поверхности a′b′c′d ′ , задающей поверхность неискаженных направлений, в которую перешла после деформации U коническая поверхность abcd . Если полуось эллипсоида вдоль направления ox 2 равна радиусу сферы, то коническая поверхность вырождается в две пересекающиеся плоскости (7) (рис. 6, а ), проходящие через образующие a′b′ и c′d ′ (рис. 6, б ). Таким образом, образующие ab и cd не растягиваются, но поворачиваются в новые положения a′b′ и c′d ′, то есть плоскости, проходящие через них, не являются инвариантными. Однако, если деформацию дополнить жестким поворотом (см. рис. 6, б ) направления cd и c′d ′ можно совместить. Значит, однородная деформация с одним главным значением, равным 1, и жесткий поворот делают возможным деформирование с инвариантной плоскостью (проходящей через cd ).
а б в
Рис. 6. Схема к определению инвариантных направлений
Итак, вектор единичной нормали к плоскости, заданной соотношением (7) имеет вид
1 K m = , e, ± . ev .
1 + K 2 V1 + K 2
В направлении е2 деформации нет (так как X2 = 1), значит, направление сдвига должно быть перпендикулярно е2 и m , тогда вектор направления сдвига s‘ = m х e 2,
Величина S удлинения материального волокна, направленного в отсчетной конфигурации вдоль нормали к габитусной плоскости, в процессе превращения за счет сдвига и объемного расширения
S 2 = |U • m 2 - ( det U ) 2. (10)
Тогда вектор сдвига может быть определен соотношением s = Ss' + (detf tr - 1)m. (11)
Зная векторы s и m , можно определить градиент деформации с инвариантной плоскостью f tr = I + sm . Выражения для векторов s и m в терминах собственных чисел и главных векторов тензора f tr дано в прил. 1.
Для определения собственных чисел тензора ftr вновь обратимся к феноменологической теории кристаллографии мартенситного перехода. Поскольку f tr – несимметричный положительно определенный тензор, то квадраты его собственных чисел (не равные 1) совпадают с собственными числами тензора (f tr) f tr. Учтем, что
( f tr ) T f tr = ( Q • B • f LIS ) T • Q • B • f LIS =
= (f LIS )T • BT . QT • Q• B• f LIS =(f LIS )T . BT • B• f LIS, где B - один из трех тензоров деформации Бейна и QT • Q = I.
Итак, используя собственные числа тензора (f LS )T . B T . B - f L IS (для конкретного вида f LIS ), получим выражения для компонент векторов s и m , по которым определим градиент деформации f tr .
Деформации Бейна считаются известными из кристаллографии (4). Предполагается, что аккомодационная деформация сдвига с инвариантной решеткой fLIS реализуется пластическим скольжением с величиной у в направлении b, действующим на плоскости с единичной нормалью n (рис. 7). Таким образом, fLIS задается как fLIS = I + у bn.
Неизвестное значение Y можно рассчитать из условия, что одно из собственных значений ( f tr T) f tr будет равно 1: подставляя в характеристическое уравнение значение собственного числа, равного 1, получим уравнение относительно неизвестного параметра Y Векторы b и n (системы скольжения) известны для каждого типа решетки из кристаллографии (для ОЦТ системы скольжения приведены в прил. 2). Остальные собственные числа и собственные векторы тензора ( f tr T) f tr используются
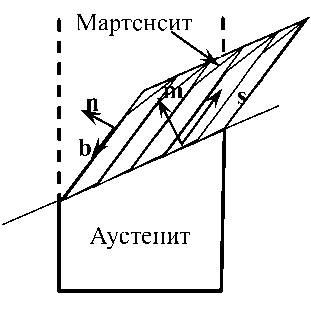
Рис. 7. Дополнительная деформация пластическим сдвигом [21]
для вычисления векторов s и m согласно приведенным выше формулам (и формулам в прил. 1).
В частности, для примера рассмотрим следующую систему скольжения в мартенсите: (011)а [11 1]а, тогда вектор нормали к плоскости сдвига и вектор направления сдвига в КСК аустенита имеют вид n = A
, 2, 2
J 11 1 1 b = A "T^r, —г Г
I V3 V3 V3
, соответственно, матрица компо-
нент тензора деформации сдвига f LIS (12) в КСК аустенита имеет вид
[ f LIS ] = 0
у у
-
V6 V6
1++
V6 V6
Y , Y
-1-
V6 V6 J
Умножаем его на тензор деформации Бейна слева, получим для компонент
η 2
γη 2
L y ^
1 + 47 П 1
< 6J j
γη 1
-
γη 2
γη 1

1 -“^ П1
Неизвестную величину сдвига определим из условия, что собственное число полученного тензора (f LIS )T ⋅ BT ⋅ B ⋅ f LIS равно 1 (для определенности пусть λ22 =1). Для этого записываем характеристический полином, учитываем, что λ22 =1, получаем квадратное уравнение для определения величины γ
-
- 1 + 2 η 1 2 + 23 γ 2 η 1 2 -η 1 4 +η 2 2 + 13 γ 2 η 2 2 - 2 η 1 2 η 2 2 -γ 2 η 1 2 η 2 2 +η 1 4 η 2 2 = 0.
Его корни – γ ≈± 0,340 .
В качестве величины сдвига выбираем положительный корень: γ = 0,340. Как отмечается в [2], сдвиг по одной атомной плоскости не может быть меньше, чем вектор Бюргерса дислокации (в относительных размерах длин ребер решетки). Для системы скольжения (011)α[111]α эта величина составляет 6 2 ≈ 1,225 , что почти в 4 раза больше вычисленной. Поэтому для аккомодации остаточных напряжений 2-го рода достаточно, чтобы сдвиги происходили не по каждой плоскости, а по каждой 4-й.
Теперь можно определить квадраты оставшихся собственных чисел и соответствующие им собственные векторы:
X2 = 0,615, X2 = 1,714, e1 = (-0,090, -0,991, 0,095), e3 = (-0,973, -0,067, 0,221).
Таким образом, используя соотношения (8), (1.П1) получим компоненты вектора нормали к габитусной плоскости и вектора направления сдвига в КСК:
n = (-0,837, -0,533, 0,122), s = (-0,286, 0,426, 0,112).
Окончательно матрица компонент тензора градиента деформации с инвариантной плоскостью имеет вид (6)
( 1,240
[ f tr ] = - 0,357
(- 0,094
0,152 - 0,034 ' 0,733 0,052 - 0,060 1,014 .
Аналогичные вычисления можно провести для случая дополнительной деформации, реализующейся двойникованием (рис. 8). В этом случае тензор дополнительной деформации имеет вид
f tw = I + Y4 twb twn tw , где у - величина двойникующего сдвига в направлении btw, дейст- вующего на плоскости двойникования с единичной нормалью ntw ;
^ tw - объемная доля двойника. Принципиально выкладки не отличаются от приведенных выше для аккомодации сдвигами. Система двойникования (в мартенсите) (112) а [ 111 ] : n tw = 1
b
tw
Г 11 1 1
1 ”/=,”/=,•
I V3 V3 V3
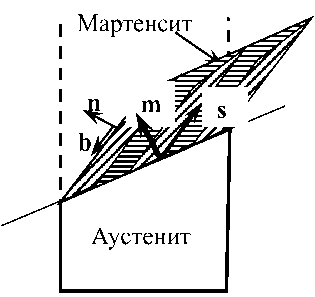
Рис. 8. Дополнительная деформация за счет двойникования [21]
В таблице приведены вычисленные компоненты векторов, задающих трансформационные системы для аккомодационных сдвигов, реализованных по возможным для ОЦТ системам скольжения, соответствующие им компоненты градиента деформации в КСК аустенита; приведены изображения этих градиентов в виде деформированных из единичного куба параллелепипедов. Зеленым изображены единичные кубы начальной конфигурации представительного мезообъема, красным – этот же объем после деформирования с инвариантной плоскостью, задаваемого тензо- ром f tr . КСК аустенита совпадают с ребрами недеформированного единичного куба (начало координат в левом нижнем углу).
Градиент трансформационной деформации и его геометрическая интерпретация
|
№ |
Аккомодация (сдвиги) f LIS = I + y bn |
Трансформационная система. Градиент деформации |
Деформация элементарного объема |
|
1 |
_ |
m = ( - 0,837, - 0,533, 0,122), |
|
|
( 011 ) 111 |
s = ( - 0,286, 0,426, 0,112). |
||
|
Y = 0,340 |
( 1,240 0,152 - 0,034 ^ |
||
|
[ f tr ] = - 0,357 0,733 0,052 |
|||
|
(- 0,094 - 0,060 1,014 ) |
|||
|
1 3 ( f tr ) - 1,026 |
|||
|
1 1 - 1,026, X 2 - 1, X 3 - 1 |
|||
|
2 |
m = (0,679, - 0,720, - 0,145), |
||
|
( 112 ) 111 |
s = (0,296, 0,231, 0,055), |
||
|
Y = 0,253 |
< 1,201 - 0,213 - 0,043 ^ |
||
|
[ f tr ] = 0,157 0,834 - 0,034 , |
|||
|
( 0,03 8 - 0,040 0,992 J |
|||
|
1 3 ( f tr ) - 1,026, |
|||
|
1 1 - 1,026, X 2 - 1, X 3 - 1. |
Окончание таблицы
|
№ |
Аккомодация (сдвиги) f IS = I + y bn |
Трансформационная система. Градиент деформации |
Деформация элементарного объема |
|
3 |
( 123 ) 11Т Y = 0,269 |
m = (0,698, - 0,694, - 0,177), s = (0,317, 0,274, 0,027), ( 1,221 - 0,220 - 0,056 ^ [ f tr ] = 0,191 0,810 - 0,049 , [ 0,019 - 0,019 0,995 J I , ( f tr ) = 1,026, X , = 1,026, X 2 = 1, X 3 = 1. |
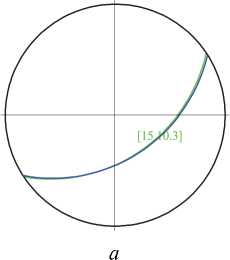
Можно отметить, что для систем (112)а [111 ] и (123)а [111 ] плоскости верхней и нижней грани куба практически не меняют положение, то есть габитусная плоскость близка к направлению [ 110| , что хорошо заметно на стереографической проекции (рис. 9, б, в). Трансформационная система для (011) а [1111 близка к экспериментально наблюдаемой плоскости габитуса для стали 80Н22
–
(0,8208, 0,1642, 0,5472), близкой к (15.3.10) y [2] и теоретически рассчитанной в [27] (рис. 10, а ). Кроме того, для всех полученных градиентов третий инвариант одинаков, то есть совпадают относительные изменения объема для все аккомодационных систем сдвига; два собственных числа тензора ( f tr ) f tr равны 1, что говорит о наличии инвариантной плоскости.
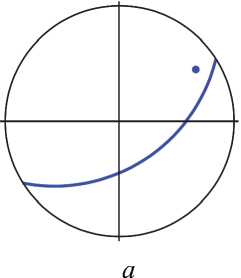
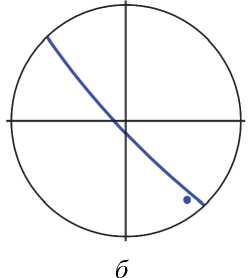
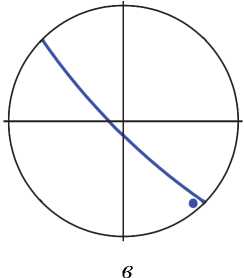
Рис. 9. Стереографическая проекция трансформационных систем, представленных в таблице: а – № 1; б – № 2; в – № 3 (точки соответствуют направлению «сдвига», дуги окружностей – инвариантным плоскостям трансформационных систем)
б
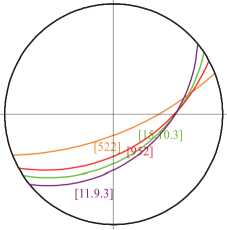
Рис. 10. Стереографические проекции трансформационных систем: а – № 1 (см. таблицу) в сравнении с экспериментально наблюдаемым габитусом (15.3.10) γ , б – экспериментально наблюдаемые габитусы в сталях [2]
Соотношение (6) для градиента деформации ftr можно использовать, если в кристаллите действует только одна трансформационная система. Согласно ориентационному соотношению Курдюмова–Закса существуют 24 эквивалентные трансформационные системы. Они получаются из вычисленной ранее перестановкой компонент и знаками. В этом случае градиент трансформационной деформации может быть записан в виде ftr = I + E ^№s(e)m(в), (14)
где ^ ( в ) - доля мартенситной фазы, образовавшейся по в —й трансформационной системе.
Выводы
В работе приведен подробный вывод выражения для градиента трансформационной деформации представительного мезообъема аустенита, в котором происходит мартенситное превращение. Вывод основывается на кристаллографической теории мартенситного превращения для сталей, в предположении, что трансформационная деформация является деформацией с инвариантной плоскостью. Подобный подход, широко используемый в литературе для описания мартенситных переходов в сталях, позволяет учесть механизмы, работающие на более низких масштабных уровнях (изменение типа решетки, аккомодационные пластические сдвиги и двойникование). Сделана попытка систематизации и обоснования с точки зрения механики сплошных сред известного подхода с целью включения его в двухуровневую модель и применения для решения конкретных задач термомеханической обработки сталей с учетом фазовых превращений.
Полученные выражения для компонент векторов трансформационной системы использованы для построения стереографических проекций этих систем, что позволило сравнить полученные результаты с известными литературными и экспериментальными данными. Кроме того, записаны компоненты градиента трансформационной деформации и получена его геометрическая интерпретация в виде деформированного параллелепипеда.
Работа выполнена при финансовой поддержке грантов РФФИ (проект №13-01-96006-урал_а, проект № 14-01-00069).
Приложение 1 Выражение для векторов s и n в терминах собственных чисел тензора f tr
Пусть x , y , z – собственные числа тензора f tr ; поскольку тензор должен описывать деформацию с инвариантной плоскостью, то, как было показано выше, x 2< 1, y 2 = 1, z 2 >1. Кроме того, тензор градиента деформации – положительно определенный, значит, x > 0, y > 0, z > 0.
Согласно соотношениям (8),(9)
1 ± K m = , e1 + , e3 =
4 1 + к 2 4 1 + к 2

±.
z 2 - 1
z 2
|
■ |
z 2 — 1 |
|
|
z. 2 — x 2 |
||
|
s ' — m x e 2 ^ |
0 |
|
|
1 — x 2 |
||
|
z 2 — x 2 J |
Тогда с учетом выражения компонент вектора n (8) и соотноше- ния (10)
S — |U ■ m| 2 - ( det U ) 2 = ( x 2 m 2 + z 2 m 2 ) — x 2 z 2 =
2 1 — x 2 . 2 z 2 — 1 2 2
= x —-- 2 + z —-- 2 - x z — z — x z — x
24422222 x — x + z — z — x z ( z — x )
z
—
( x 2 — z 2) + ( z 2 — x 2 )( z 2 + x 2 ) — x 2 z 2 ( z 2 — x 2 )
z
—
x
— —1 + z + x — x z .
Далее, соотношение (11) выразим через собственные числа:
s — S s ' + (det f tr — 1) m ^
|
1 z 2 — 1 |
|
|
+V z 2 — x 2 |
|
|
2 2 22 z + x — x z — 1 |
0 |
|
1 1 — x 2 |
|
|
Nz 2 — x 2 |
1 — x 2
2 z
2 x

22 xz
±.
2 z
2 z
x 2

2 2 xz
о


2 2
Преобразуем первую компоненту вектора. Первое слагаемое в выражении для первой компоненты можно преобразовать следующим образом (без корней и знаменателя):
( z 2 + x 2 - x 2 z 2 - 1)( z 2 - 1) = [ z 2 (1 - x 2) - (1 - x 2) ] ( z 2 - 1) = (1 - x 2)( z 2 - 1)2.
Тогда числитель выражения для первой компоненты
+| z 2 - 1|V1 - x 2 + (| xz | - 1 ) 71 - x 2 = V1 - x 2 ( + ( z 2 - 1) + xz- 1 ) , здесь учтено, что z 2 >1, x , y > 0.
Аналогично преобразуем третью компоненту вектора. Первое слагаемое в выражении для третьей компоненты можно преобразовать следующим образом (без корней и знаменателя):
( z 2 + x 2 - x 2 z 2 - 1 )( 1 - x 2 ) = [ z 2 ( 1 - x 2 ) - ( 1 - x 2 ) ] ( 1 - x 2 ) = ( z 2 - 1) ( 1 - x 2 ) 2.
Тогда числитель выражения для третьей компоненты
|1 - x 21V z 2 - 1 ± ( xz - 1)V z 2 - 1 = V z 2 - 1 (1 - x 2 ± ( xz - 1)).
Окончательно выражение для вектора s через собственные числа тензора f tr выглядит так:
